Радиолокационный метод поиска подповерхностных объектов на основе взаимодействия сейсмических и электромагнитных волн

Автор: Гарин Е.Н., Шайдуров Р.Г.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 8 т.12, 2019 года.
Бесплатный доступ
Работа посвящена обоснованию метода подповерхностных объектов в земле, позволяющего получитьдополнительноновыйпараметрпринятиярешенияввидеимпульснойхарактеристики механических вибраций оболочки объекта, не используемый в существующей аппаратуре как в России, так и за рубежом. Это даст возможность существенно улучшить вероятность обнаружения, идентификации объекта и снизить вероятность ложных тревог.
Сейсмическая волна, электромагнитный сейсмоисточник, параметрический метод, радар
Короткий адрес: https://sciup.org/146281411
IDR: 146281411 | УДК: 53.09, | DOI: 10.17516/1999-494X-0199
Parametric method for searching subsurface objects based on the interaction of seismic and electromagnetic waves
The physical basis of the method for detecting subsurface objects in the earth is described on the basis of excitation of the Rayleigh shock seismic waves along the earth-air interface and registration by the radar method of the Doppler phase shift arising under the action of seismic impacts of vibrations of the search object body. The energy dependencies for the radar channel are estimated, the binding parameters of the seismic emitter and the radio channel are given. The results of experimental work and mathematical processing of the data are presented.
Текст научной статьи Радиолокационный метод поиска подповерхностных объектов на основе взаимодействия сейсмических и электромагнитных волн
Сегодня во многих странах мира, в том числе и в России, ведутся исследования по привлечению новых физических принципов обнаружения и идентификации различных подповерхностных объектов. Из известных способов обнаружения объектов поиска в настоящее время используют импульсный индукционный и радиоволновой методы. Радиоволновой метод, или георадар, основан на регистрации тангенса угла потерь вмещающего грунта в широком диапазоне частот 300-3000 МГц. Несмотря на все усилия, статистические характеристики поиска- вероятности правильного обнаружения не достигают 0,9, а ложной тревоги в пределах 102. Проблема дистанционного обнаружения различных предметов искусственного происхождения в задачах поиска археологических ценностей, инженерных коммуникаций, миноподобных объектов в целях гуманитарного разминирования и при современном развитии техники и технологий остается до сих пор актуальной.
Основные вопросы данной области связаны с повышением вероятности обнаружения, качества селекции «целей», увеличения производительности и снижения затрат при проведении этих работ.
Эти проблемы освещеные в многих научных статьях и монографиях [1–5]. Ниже изложен новый принцип решения этой проблемы на основе возбуждения оболочки объектов поиска сейсмическими волнами и регистрации радиолокационным методом их собственных колебаний.
Принцип реализации и теоретические основы параметрического метода
На рис. 1 представлена модель параметрического метода поиска [6]. Способ реализуется следующим образом: приемопередатчик радиолокатора 5 сканирует поверхность земли 1 качающимся лучом 7 впереди транспорта – носителя поисковой установки, 6 – антенна радиолокатора. Поверхностная волна Релея 3 распространяется от сейсмического излучателя 4 и возбуждает механические колебания во всех приповерхностных неоднородностях, включая объект поиска 2. Последние существенно отличаются по частоте и амплитуде вибраций от других объектов поиска, что и является информационным признаком распознавания.
Объекты естественного происхождения, камни, неоднородности рельефа грунта, обычно являющиеся причинами ложных тревог, в новом методе дают существенно меньшие частоты колебаний, если вообще возбуждаются механически. Эффективная глубина прохождения сейсмической волны hЭФ, где сосредоточено до 95% всей энергии [7], определяется как hэф =0,6(1+σ)λR,
где σ – коэффициент Пуассона, λ R – длина сейсмической волны.
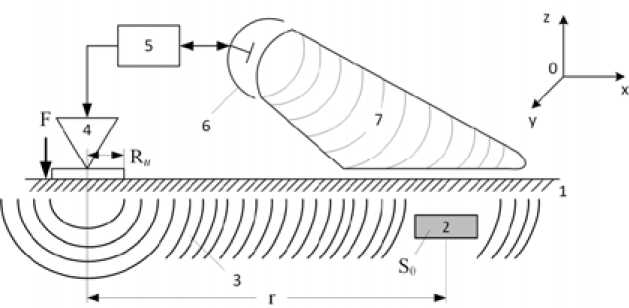
Рис. 1. Схема реализации радиолокационного параметрического метода обнаружения подповерхностных объектов
Fig. 1. The implementation scheme of the radar parametric method for the detection of subsurface objects
С учетом этого в поверхностном слое плотность потока сейсмической энергии будет в
Q C = — выше, чем во всей полусфере площадью 2 nr 2 . Так, при X R = 2 м и r = 10 м, QC = 5;
Л
Это потенциальный запас, увеличивающий сдвиг почвы под влиянием волны Релея. Амплитуда механического смещения объекта при возбуждении сейсмической волной
Δ aX , Z =
F R u S Q 0 τ 2 π Ru 2 r m
где F – сила удара сейсмического источника; Rи – эффективный радиус контактной поверхности излучателя сейсмоакустических волн (сигналов) с грунтом; S 0 – площадь поверхности корпуса объекта поиска, перпендикулярная действующей силе; r – расстояние до объекта поиска; Q – величина добротности объекта поиска при механическом резонансе; m – масса объекта и присоединенного грунта; τ – длительность импульса, производимого сейсмическим источником.
При периодическом повторении сейсмоакустических импульсов отраженный от объекта й n 2πΔа
U ( t ) = Um ∑ sin( ω it + , sin Ω t ), (3)
i=1 λi где ωit = 2πfi – циклическая частота радиолокационного сигнала; λi – длина волны радиолокационного СВЧ сигнала; Ω = 2πF – циклическая частота сейсмоакустического сигнала; i – текущий номер гармоники.
Для периодического импульсного сигнала, когда 90 % его энергии сосредоточено в первой гармонике, фазовый сдвиг первой гармоники принимаемого радиолокационного эхо-сигнала будет равен:
2 π Δ аX Z
Δ ϕ = , sin Ω t . (4)
λ i
Путем фазового детектирования отраженного от поверхности грунта и объекта поиска радиолокационного сигнала, выделяя коэффициент фазовой модуляции Δ φ , можно получать информацию о смещении Δ αX,Z , прямо пропорциональном отношению (2).
Для одинаковых по размеру объектов величина этого смещения тем больше, чем выше добротность его корпуса и меньше масса. Для объектов искусственного происхождения пара-
Q метр S0 0 будет явно отличаться от параметров естественных объектов (например, камней) m или искусственных (металлический мусор).
Задача классификации целей может быть решена путем сравнения собственных частот колебаний (импульсных характеристик) объектов под действием сейсмической волны.
Общая системная формула для случая излучения и приема сигнала с базовой машины, определяющая требуемую мощность передатчика РЛС, зависит от совокупности параметров всего комплекса:
P = 4 PN λ 2 R 1 4 e 4 α h
0 = Δ aХ 2 , ZSЭSПQ γ 4.
Здесь параметр сейсмического канала входит в виде амплитуды механического смещения корпуса объекта поиска Δ αX,Z под действием вибраций. ,
Остальные обозначения: P N – мощность шума приемника при полосе пропускания А f = 30 Гц; к - длина электромагнитной волны РЛС; R 1 - расстояние от антенны РЛС до объекта поиска; h – глубина заложения; α – коэффициент затухания электромагнитных волн в земле; S э - эквивалентная площадь объекта; S n - площадь приемной антенны; Q - механическая добротность объекта при воздействии сейсмической волны; γ – геометрический коэффициент преломления по напряженности поля. При выносе приемника на автономный поисковый модуль зависимость от расстояния будет в виде ( R 1 h )2, что снижает мощность передатчика РЛС (5). На рис. 2 изображены графики зависимости смещения корпуса объекта исследования от расстояния до сейсмоисточника при его силе удара 1000 кг и зави-
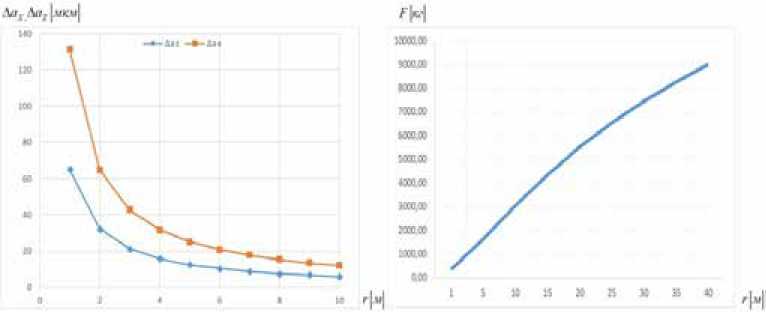
Рис. 2
Fig. 2
симость требуемой силы удара сейсмоисточника F от расстояния до объекта при заданном его смещении Δ a Z = 50 мкм.
Возбуждение сейсмических колебаний
Одним из новшеств метода является применение невзрывных электромагнитных сейсмических источников [8], позволяющих создать концентрированную сейсмическую волну Релея на границе раздела сред земля/воздух. Воздействие сейсмической волны на объект поиска определяет его смещение в пространстве и напрямую зависит от силы удара источника.
Принцип работы импульсного невзрывного излучателя сейсмических волн показан на рис. 3.
Источник состоит из опорной плиты 1, стойки 2, пригруза 3, магнитопровода пригруза 4, обмотки возбуждения 5, магнитопровода якоря 6, рамы якоря 7, демферов 8. При пропускании тока через обмотку возбуждения между магнитопроводом якоря и полюсами магнитопровода индуктора пригруза, представляющего собой металлический балласт, который позволяет опорной плите плотно прилегать к грунту, создается магнитный поток Ф , который приводит пригруз в движение вверх с силой F(t ).
В начальном положении опорная плита находится на поверхности грунта, придавливая его весом пригруза, при подаче импульса тока на обмотку 4, пригруз начинает движение вверх по координате Z, освобождая центр опорной плиты от собственного веса, передавая его на края последней. Вследствие этого поверхность грунта под опорной плитой образует волновую форму.
Развиваемая сила удара излучателя оценивается по формуле Максвелла
B 2 S
F ( t ) = л(Ч
2 ^ 0
где: B(t ) - индукция в зазоре электромагнита, ц 0 — магнитная проницаемость воздуха, S - ло-щадь сечения магнитопровода.
Масса такого излучателя существенно зависит от требуемой силы удара. Так, при | F ( t )| = 25000 кг масса излучателя составит 2,5 т (источник «Енисей КЭМ-4»), а при | F ( t )| = 1500 кг
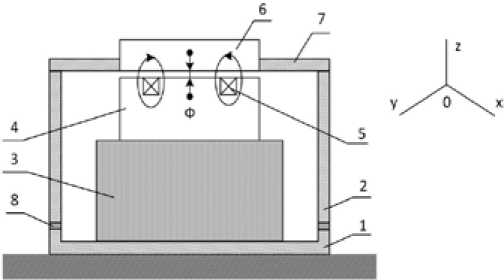
Рис. 3. Конструктивная схема невзрывного импульсного источника
Fig. 3. The design of the non-explosive pulsed source
масса экспериментального импульсного невзрывного излучателя сейсмических волн равнялась 100 кг.
Результаты экспериментальных работ
Для проверки теоретических расчетов были поставлены ряд натурных экспериментов согласно схеме реализации метода (см. рис. 1).
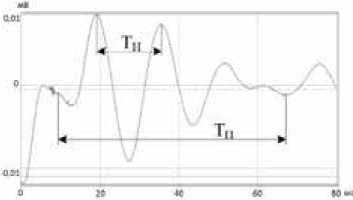
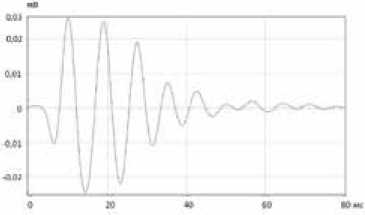
Импульсные переходные характеристики (ИПХ) регистрировались с помощью прикрепленного к корпусу объектов поиска акселерометра Zetlab-110C. На рис. 4 показаны ИПХ для двух объектов исследования № 1 и № 2, в виде укороченных цилиндров диаметром 400 и 100 мм, кирпича и подстилающей поверхности (песка). Необходимо отметить, что объекты поиска имеют более протяженные по времени и сжатые по спектру частот характеристики.
Полученные ИПХ были обработаны с помощью взаимно корреляционной функции ВКФ
R ( τ ) = τ ∫ u 1( t ) u 2( t - τ ) dt . (7)
График коэффициента ВКФ между объектом № 1 и другими приведен на рис. 5.
На основании полученных коэфициентов взаимной кореляции (КВК) можно сделать вывод, что каждый из исследуемых объектов имеет свой индивидуальный акустический портрет. К примеру, коэффициенты ВКФ объектом поиска № 1 и остальных различаемые приблизительно в три раза.
Объект № I
Тц-41 мс; Гц-13,6 мс, />-76 Гц
aw

о и <4 «о «•*
Кирпич Тц-ЗО мс Тц*5 мс, 4,-200 Гц
Объек г №2
Тц=60 мс. Тц=8.25 мс. /,=121 Г и
Рис. 4. Импульсные переходные характеристики объектов, полученные с помощью акселерометра
Fig. 4. Impulse transient characteristics of objects obtained using an accelerometer
о.ю

4)02 I ОХ» •
О Ю <• W К*
Песок без (кЗъекга
Тц-16 мс. Тц-5,5 мс. /г 180 Гн
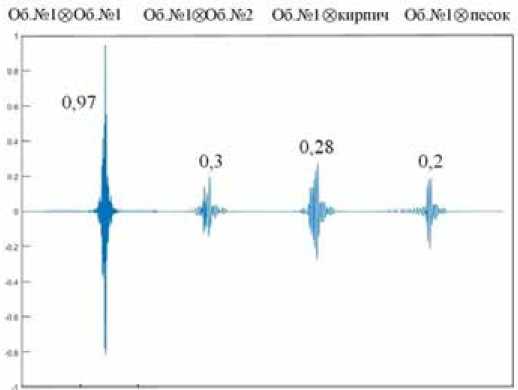
Рис. 5. График коэффициента ВКФ объекта исследования № 1 с другими объектами
-
Fig. 5. The graph of the cross correlation coefficient object of study No. 1 with other objects
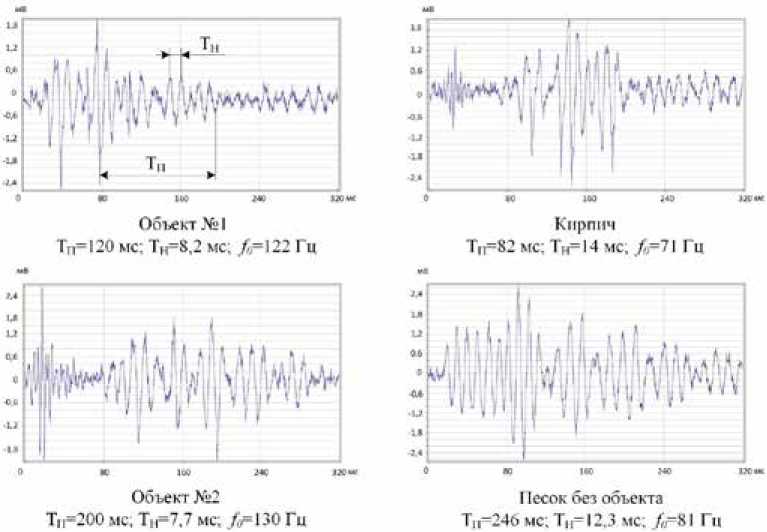
Рис. 6. Импульсные переходные характеристики объектов, полученные с помощью радиолокатора
-
Fig. 6. Impulse transient characteristics of objects obtained using radar
Также с помощью автодинного радиолокатора были получены ИПХ объектов (рис. 6). Как видно из графиков, радиоволновую реакцию полупространства характеризуют три параметра – f o частота, A F полоса частот и длительность реализации Т П , которые для разных объектов отличаются, однако необходимо сузить зону (ЭПР) приема радиосигнала до размера объекта поиска.
Оценка вероятностных характеристик обнаружения
В процессе поисковых работ решается задача обнаружения объекта поиска, распознавание его вида и принятие решения о пропуске либо маркировке. Критериями обнаружения являются вероятности правильного обнаружения P , пропуска цели P и ложной тревоги P , зависящие от отношения сигнал/шум.
При превышении заданного порога снижается скорость перемещения луча РЛС и далее выполняется алгоритм распознавания по параметрам принимаемых сигналов, в частности наряду с параметрами F , Δ F , q , определяются взаимно-корреляционные функции (ВКФ) или их коэффициентов (КВК) в виде оценки интеграла (8):
1 T
R ( τ ) = uC ( t ) uc ( t - τ ) dt ,
T 0
где uC ( t ) , uс ( t ) – соответственно нормализованные по дисперсии значения амплитуды принимаемого сигнала; T – время наблюдения сигнала.
На рис. 7 представлена графическая зависимость вероятностей PO и PЛТ от отношения сиг-нал/шум на входе приемника РЛС [8] для нормального распределения шума.
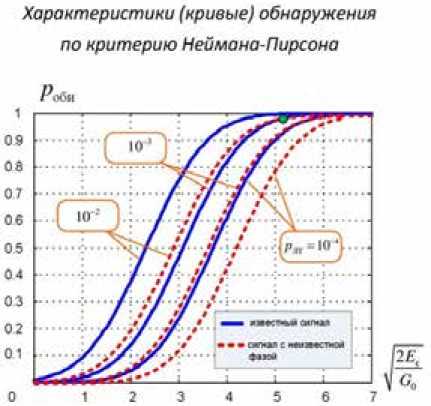
Рис. 7. Характеристики обнаружения
-
Fig. 7. Characteristics of detection
Если комбинировать поисковую систему с другим физическим принципом работы, например ради ово лновым, наиболее используемым на практике с оценкой тангенса угла потерь ЭМ
J сигнала 1дф = —, то при равном параметрическому методу отношения сигнал/шум по мощ-toE ности суммарная величина qu увеличивается в 2 , а вероятность PO – с 0,8 до 0,9.
Метод распознавания типа объекта (образа) может быть реализован через алгоритм построения нейронных сетей, путем формирования при обучении регрессионной математиче- ской модели:
M ( x i ) = a 11 x 1 + a 2 x 2 + a 3 x 3 , (9) где x 1 , x 2 , x 3 – измеряемые параметры сигнала РЛС; α 11 , α 12 , α 13 – коэффициенты регрессии, получаемые в процессе обучения.
При превышении M ( x i ) некоторого задаваемого порога M П бортовой компьютер принимает решение о маркировке цели.
На рис. 8 изображена диаграмма обнаружения объекта по трем наблюдаемым параметрам. Здесь в трех точках располагаются параметры сигналов, получаемых с датчиков. Каждый из образов окружает некоторое статистическое облако разброса параметров (дисперсия результатов измерений), получаемых в результате повторения обучения системы. Разделение классов объектов производится построением гиперплоскости ГП i на векторах, разделяющей получаемые информационные параметры образа объекта.
Под гиперплоскостью понимается поверхность, разделяющая пополам среднее расстояние между двумя соседними параметрами. Понятно, что при некотором классе объектов подобное построение ГП i производится для каждого класса и решение принимается путем анализа сигналов по каждому из типов искомых объектов R (0), Δ F 0, TO , f 0.
Если параметры xi независимы друг от друга, то статистические вероятности обнаружения PO, PЛТ, q определяют с помощью рис. 8 через соотношение сигнал/шум q = .i q 1. (10) =1
Это позволяет при одинаковом отношении сигнал/шум по каждому параметру повысить общее отношение сигнал/шум в 3,3 раза по напряжению или в 10 раз по мощности и достичь, согласно графику распределения Неймана-Пирсона при вероятности ложной тревоги PЛТ = 10–2, вероятности обнаружения цели P O = 0,98.
Таким образом, описанный метод позволяет в потенциале получить существенное улучшение статистических характеристик поиска, а в комбинации с радиоволновым методом в целом достичь необходимых результатов. Включение дополнительных информационных каналов даст возможность дополнительно улучшить параметры P O , P ЛТ .
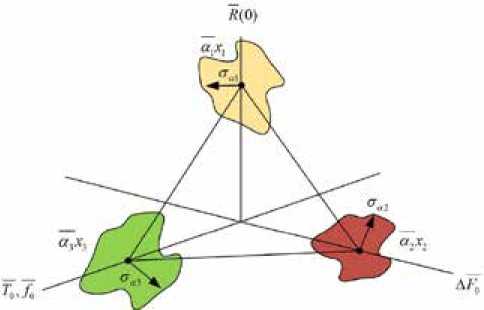
Рис. 8. Диаграмма обнаружения объекта по трем наблюдаемым параметрам
Fig. 8. Diagram of object detection by three observed parameters
Заключение
-
1. В статье описаны научно-технические основы радиолокационного параметрического метода поиска подповерхностных объектов на основе взаимодействия сейсмических волн ре-леевского типа и электромагнитных излучений от радиолокатора (РЛС) в диапазоне частот до 10 ГГц.
-
2. Приведены энергетические зависимости сейсмического и радиолокационного канала от расстояния. Дана оценка мощности сейсмического источника.
-
3. Параметрический метод позволяет в потенциале получить существенное улучшение статистических характеристик поиска, а в комбинации с радиоволновым методом в целом достичь необходимых результатов. Включение дополнительных информационных каналов позволит улучшить параметры вероятности обнаружения объектов, их классификации и снижения уровня ложных тревог.
Работа выполнена при финансовой поддержке РФФИ в рамках научного проекта № 18-07-00180.
Список литературы Радиолокационный метод поиска подповерхностных объектов на основе взаимодействия сейсмических и электромагнитных волн
- Щербаков Г.Н., Анцелевич М.А. Новые методы обнаружения скрытых объектов. М.: ООО "Эльф ИПР", 2011. 503 с.
- Вопросы подповерхностной радиолокации. Коллективная монография. Под ред. А.Ю. Гринева. М.: Радиотехника, 2005. 416 с.
- Шайдуров Г.Я., Кудинов Д.С. Дистанционный метод поиска минно-взрывных заграждений и мин в любых корпусах на основе взаимодействия электромагнитных и акустических волн. Специальная техника, 2011, 4, 39-43
- Robert W. Haupt., Kenneth D. Rolt. Standoff Acoustic Laser Technique to Locate Buried Land Mines, Lincoln laboratory journal, 2005, 1(15), 3-23.
- Liam A. Marsh, Wouter van Verre, John L. Davidson, Xianyang Gao, Frank J.W. Podd, David J. Daniels and Anthony J. Peyton. Combining Electromagnetic Spectroscopy and Ground-Penetrating Radar for the Detection of Anti-Personnel Landmines. Sensors (Bazel). 2019, 19(15), 3390.
- Шайдуров Г.Я. Пат. № 2390801 РФ. Способ поиска объектов искусственного происхождения в земле и устройство для его осуществления. Зарегистрировано в Гос. реестре изобретений РФ 27 мая 2010 г.
- Бондарев В. И. Сейсморазведка. Екатеринбург: УГГА, 2007. 690 с.
- Merill L. Skolnik. Radar hand book. The McGraw-Hill Companies, 2008, 671 p.
- Детков В.А. Импульсные электромагнитные сейсмоисточники "Енисей". Обзор моделей и опыт практического применения. Приборы и системы разведочной геофизики, 2007, 4, 5, 5-10
