Расчет характеристик опускающей и удерживающей сил токоприемника

Автор: Евдокимов А.А.
Журнал: Теория и практика современной науки @modern-j
Рубрика: Основной раздел
Статья в выпуске: 11 (29), 2017 года.
Бесплатный доступ
В статье приведен расчет характеристик опускающей и удерживающей сил токоприемника. Привод токоприемника должен обеспечивать: необходимую величину опускающей силы, требующейся для надёжного опускания токоприёмника (при необходимости) с заданной скоростью за определенное время; определенную величину удерживающей силы, предотвращающей самопроизвольный подъём токоприёмника при высоких скоростях движения.
Токоприемник, опускающая сила, удерживающая сила, подвижная рама, максимальная рабочая высота
Короткий адрес: https://sciup.org/140270296
IDR: 140270296
Calculation of the characteristics is lowered and the holding force of the pantograph
The article presents the calculation of the characteristics lowering, and holding forces of the susceptor. The drive current collector should ensure: the necessary value of the lowering power required for a reliable lowering of the pantograph (if necessary) with a given speed for a certain time; a certain amount of holding force that prevents accidental lifting of the pantograph at high speeds.
Текст научной статьи Расчет характеристик опускающей и удерживающей сил токоприемника
В связи с тем, что характеристика удерживающей силы отличается от характеристики опускающей силы на величину двойной силы трения в шарнирах подвижных рам и приводе токоприемника, производится расчет только опускающей силы, а величина удерживающей силы уточняется при проведении стендовых испытаний, когда характеристики токоприемника определяются путем непосредственных измерений.
В общем случае расчет опускающей силы производится в следующем порядке.
Моменту, создаваемому опускающими пружинами Моп.пр и необходимому для обеспечения необходимой опускающей силы, «помогает» весовой момент Мв и противодействует момент Мп.пр, создаваемый подъемными пружинами (все моменты берутся относительно осей главных валов):
М = М + М - М . оп. пр п. пр оп в
Задаваясь величиной опускающей силы Fоп определяем момент, который должна создавать эта сила на главном валу,
М = F, srn(a + e) оп 2 1 sin в ’ где l1 – длина стержня нижней подвижной рамы;
α и β – углы наклона стержней соответственно нижней и верхней подвижных рам.
Здесь следует иметь в виду, что величина реальной опускающей силы, приложенной к полозу, меньше расчетной на величину сил трения в шарнирах и пневматическом приводе токоприемника. Поэтому в качестве расчетной следует брать величину F оп , увеличенную по сравнению с заданной примерно на 3 кгс для токоприемников с одним поршнем в цилиндре и на 5 кгс – с двумя поршнями.
Построение характеристики Моп.пр = f(H) целесообразно начинать с максимальной рабочей высоты (Hмакс = 1900 мм), задавшись требуемым значением Fоп. После нахождения этой точки характеристики необходимо определить величину Fоп во всем рабочем диапазоне высоты, а величину удерживающей силы Fvд – вплоть до сложенного положения токоприемника. Опускающая сила
F = 2( М , + М в - М^ )sin в
.
оп 1^ sin( « + в )
В том случае, если Foп окажется в каких-то точках менее величины, требуемой соответствующим стандартом или техническими условиями, необходимо откорректировать параметры кинематических звеньев, пружин и других элементов, входящих в систему обеспечения опускающей силы токоприемника.
Рассмотрим в качестве примера расчет характеристики опускающей силы токоприемника.
Из схемы одной половины опускающего механизма (рисунок 1) видно, что k = Vs2 + h2; e = arctg —.
s
Задаваясь углом ω = ω0 + ∆α, решаем треугольник со сторонами R1, k и с:
tg 1П - ^) = qctg1 ю‘; n+^ = 180°-го, где k-R q =------1.
k + R
Исходя из полученных уравнений определяем углы и решаем треугольник со сторонами с, l и R 2 .
Углы ψ, ν и γ определяются из соотношений:
ψ tg ?=
r γ r ν r
; tgg = 7 ; tgg = IT ’ p - c 2 p -1 2 p - R2
где
с =
k sin to c + 1 + R
; p = —;—; r = sin ^ 2
( p - c )( p - I )( p - R 2) p
Величину плеч h1, h2, h3 определяем из соотношений h = R sin(n + v); h = R sin ^; h = R sin X, где угол
X = 180 — ^ — e -v + y •
Исходя из конструктивных параметров пневматического привода и всей системы опускающего механизма, а также углов поворота вала привода (точка Q) и главного вала токоприемника (точка О), делается прикидочный расчет пружины опускающего привода. Выбранные параметры пружины уточняются по окончании расчета характеристики М оп = f(α, H).
Задаваясь силой Fоп. пр, создаваемой опускающей пружиной привода, определяем момент вращения от этой силы относительно точки Q:
МQ = F on . np h 3 .
Силу F оп. пр определяем как
F on. пр
=F оп. пр мин
+ ΔF
оп . пр
где F оп. пр мин – сила, создаваемая пружиной при опущенном положении токоприемника (величина этой силы определяется степенью предварительного сжатия пружины при установке ее в цилиндр);
∆ F оп. пр – изменения усилия, создаваемого пружиной при повороте вала на заданный угол:
AF = z (x — x3), on. пр on. пр 1 2 , zоп. пр – жесткость пружины;
х1 = R3cosλ1 и х2 = R3cosλ2- начальная и конечная абсциссы пальца рычага при повороте вала на заданный угол.
Сила, действующая вдоль стержня l,
Fl =
M Q h
Момент опускающих пружин относительно точки O
Mоп . пр = Flh 1 .
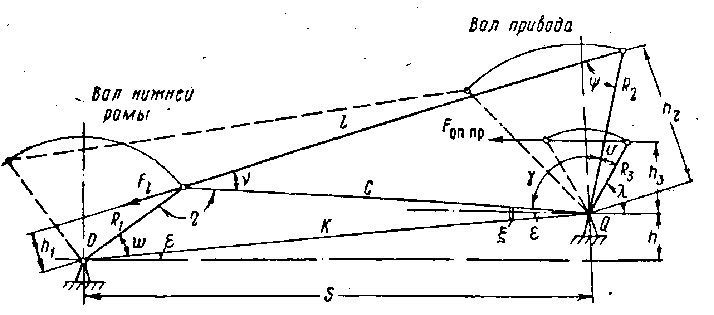
Рисунок 1 – Расчет опускающей силы токоприемника
Далее, исходя из конкретных конструктивных параметров привода, определяется жесткость опускающей пружины и рабочий ход привода. Для различных значений высоты токоприемника определяется М оп.пр при выбранной жесткости пружины и рассчитывается истинная величина Fоп . Если она оказывается менее заданной, производится корректировка жесткости пружины или размеров рычагов. При необходимости несколько изменяются также начальные углы. Диаметр поршня пневматического привода должен быть таким, чтобы при минимальном давлении сжатого воздуха Р в мин токоприемник поднимался до заданной высоты.
Список литературы Расчет характеристик опускающей и удерживающей сил токоприемника
- Тищенко А. И. Справочник по электроподвижному составу, тепловозам и дизель-поездам. Том 2, - М.: Транспорт, 1976г.
- Михеев В. П. Контактные сети и линии электропередачи: Учебник для вузов ж.-д. транспорта. - М.: Маршрут, 2003. - 416 с.
- Сидоров Н.И., Сидорова Н.Н. Как устроен и работает электровоз - М.: Транспорт, 1988.
