Расчет и моделирование регулировочной характеристики шланговой задвижки

Автор: Зарецкая Маргарита Игоревна, Скворцов Борис Владимирович, Зарецкий Илья Сергеевич, Таипова Дилара Раисовна
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 6-1 т.19, 2017 года.
Бесплатный доступ
В статье описана методика определения пропускной способности шланговой задвижки при использовании её в устройствах регулирования давления и стабилизации скорости вязких потоков в трубах. Рассмотрены характеристики задвижки, определяющие пропускную способность для различных конструктивных параметров. Разработана система управления нанесением изолирующих покрытий на внутреннюю поверхность труб, проведено математическое моделирование шланговой задвижки. Полученные данные описывают статическую характеристику задвижки, которая позволяют организовать процедуру автоматического управления при медленных изменениях давления и скорости потока.
Шланговая задвижка, пропускная способность, статические характеристики задвижки, стабилизация скорости потока
Короткий адрес: https://sciup.org/148205384
IDR: 148205384 | УДК: 62-543.3
Calculation and simulation of the adjustment features hose valves
The article describes the method of determining the bandwidth pinch valves when used in devices regulating the pressure and stabilize the speed viscous flows in pipes. The characteristics of the valves, determining the throughput for different design parameters. Developed a control system for applying insulating coatings on internal surface of the pipe, the mathematical modeling of the pinch valves. The obtained data describe the static characteristic of the valve, which allows to organize the process of automatic control for slow changes in pressure and flow rate.
Текст научной статьи Расчет и моделирование регулировочной характеристики шланговой задвижки
Таипова Дилара Раисовна, старший лаборант.
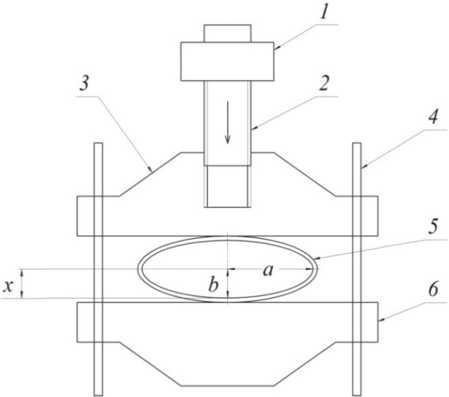
Рис. 1. Схема шланговой задвижки:
1 – подшипник, 2 – винт от управляющего двигателя, 3 – траверс, 4 – направляющие, 5 – эластичный канал, 6 – корпус, x – величина деформации шланга, a , b – геометрические размеры сечения шланга
Шланговая задвижка регулирует поток жидкости путем сдавливания эластичного канала 5, что изменяет геометрические параметры пропускного отверстия. Под действием винта от управляющего двигателя 2 происходит смещение траверса 3 по отношению к корпусу задвижки, тем самым изменяется форма и площадь сечения пропускного отверстия. При расчете считаем, что сечение при сжатии принимает форму овала, а максимальный размер пропускного отверстия достигается при отсутствии сжатия и определяется площадью окружности S =π r 0 2 , где r 0 – радиус не сдавленного шланга. Под регулировочной характеристикой понимается зависимость пропускной способности от перемещения перекрывающего траверса шланговой задвижки.
Для использования шланговой задвижки в системах управления необходимо получить за-
кон изменения площади сечения пропускного отверстия шланговой задвижки от величины деформации x эластичного канала. Пропускная способность определяется площадью отверстия
режимах малого пропускания задвижки) имеют место большие погрешности. Например, при б = 1, относительная погрешность приближения (3)
шланговой задвижки, которая определяется как
площадь эллипса S = πax в сжатом виде, и как площадь круга S 0 = π r 0 2 при отсутствии сжатия. Степень открытия q шланговой задвижки опре-
делится как отношение
q =

0 ≤ q ≤
1,0 .
Очевидно, что длина окружности поперечного сечения шланга при деформации не изменяется. Длина оболочки эллипса определяется
при ограничении двумя членами ряда составит Y = 25%, что недопустимо много для моделирования процесса. Приближение эллиптического интеграла тремя членами ряда (3) не позволяет получить аналитического решения уравнения (2). Тем не менее, для получения прямого аналитического решения уравнения (2) воспользуемся следующей методикой. Обозначим:
- (1 - -^)sin2 P d p = f (-) . (4)
aa
п
I
по формуле [7]:
п
2 _f Л ^
L = 4 at 1 - - £ 2 sin2 вdP = 4 aE I — , £ I , (1)
о X 2 J
Проведем расчет функции f ( - / a ) , полагая, что всегда 0 ≤ x ≤ a (см. рис. 1). Представим данные в виде таблицы 1.
График функции f I —
X a J
имеет вид, пока-
где

эксцентриситет (смотри
рисунок 1), p - промежуточный параметр инте-
( л грирования, E I —, 8 - эллиптический инте-
занный на рис. 2 (кривая 1).
Уравнение линейной аппроксимации кривой 1, полученное в программе MATHCAD имеет вид (прямая 2):
f ( - ) « 0,944 + 0,59 - . aa
грал второго рода. За начало координат принят центр эллипса, где х = 0 .
Из условия равенства длины контура эллип-
са и окружности шланга в исходном состоянии составим уравнение, связывающее в общем
виде конструкционные параметры задвижки при сжатии пропускного канала:
Максимальная погрешность линейной аппроксимации, определенная в той же программе, составляет у = 5.6%, в точке х/а=0. Точность не высока, однако, выражение (5) позволяет получить «грубый» закон регулирования задвижки. Подставляя (5) в уравнение (2), получаем:
4 a (0,944 + 0,59 - ) = 2 л r0 . (6) a
п I------
4 a I \ 1 — (1
x 2
—2 ) sin2 pdp = 2 пг 0 . (2) a 2
Отсюда
2 пг - 2,36 -a = 0
3, 776
= 1,664 r0 - 0,625 - .
Для получения регулировочной функции шланговой задвижки необходимо в явном виде получить зависимость а от х . Интегральное уравнение (2) не имеет точного аналитического решения. Приближенное аналитическое реше-
ние возможно при разложении эллиптического
интеграла (2) в ряд, который имеет вид:
- - 1 т
X 2 J
1 - 2 V £ 4
2 - 4 J 3
. (3)
При ограничении в разложении (3) двумя членами ряда при б ^ 1,0 (при х ^ 0, то есть в
Определяя площадь эллипса, получим закон изменения площади пропускного отверстия от перемещения траверса задвижки:
S ( - ) = п -a = л х 2 П Гй - 2,36 - = 5,228 xr„ - 1,9635 -2
3,776 , 0 , , (7)
при этом 0 ≤ х ≤ r 0 .
Степень открытия шланговой задвижки
определяется как относительное изменение пропускной способности по формуле:
I S ( - ) = 1 5,228 r 0 - - 1,9635 -2 =
q (- ) =
\ S 0 V л г 02
Таблица 1
|
x a |
0 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
1,0 |
|
f ( xa ) |
1 |
1.016 |
1.051 |
1.096 |
1.151 |
1.211 |
1.276 |
1.346 |
1.418 |
1.493 |
1.571 |
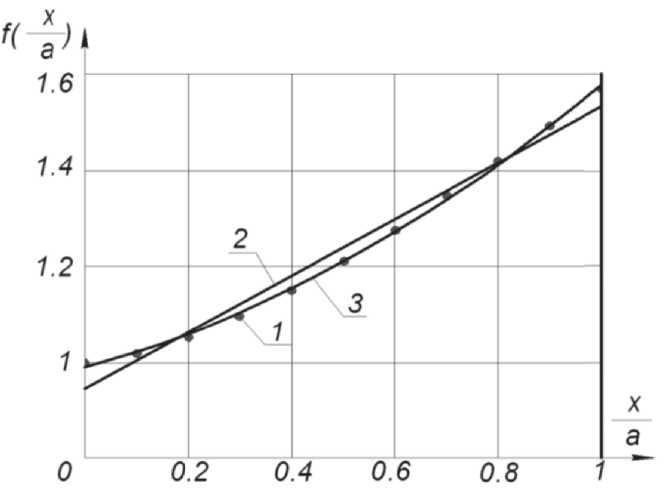
Рис. 2. График эллиптического интеграла 1 и его алгебраическая аппроксимация: 2 - линейная, 3 - квадратичная
= 1,664 - - 0,625( x )2 . (8) N r o r o
Проверяем: при x = r 0 , q ( x ) = 1,019 . В идеальном случае q ( r 0 ) = 1,0 . Таким образом, погрешность моделирования закона регулирования шланговой задвижки при линейной аппроксимации эллиптического интеграла (4) составляет 1,9 %, что вполне приемлемо для большинства технических задач. Результаты расчета по формуле (8) пропускной способности шланговых задвижек, имеющих разные размеры r 0 , представлены на рис. 3.
Для более точного моделирования воспользуемся квадратичной аппроксимацией эллиптического интеграла (4) (кривая 3 рисунка 2):
f ( x ) « 0,989 + 0,293 x + 0,297( x )2 . (9) aaa
Максимальная погрешность аппроксимации Y = 1.1%, в точке х/а=0.Подставляя (9) в уравнение (2),получаем:
4 ^ [0,989 + 0,293 x + 0,297( x )2 ] = 2 п r0 .
aa
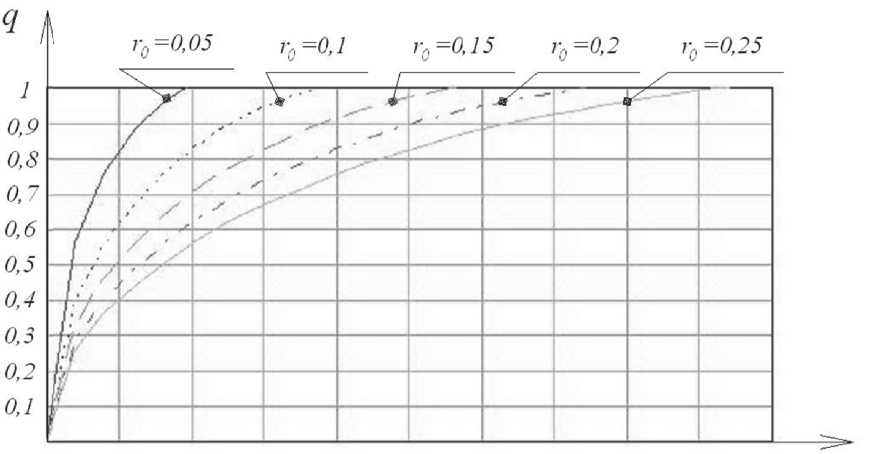
О 0,025 0,05 0,075 0.1 0,125 0,15 0,175 0,2 0,225 0,25 хм
Рис. 3. Зависимость пропускной способности шланговой задвижки q от перемещения x траверса при различных размерах шланга
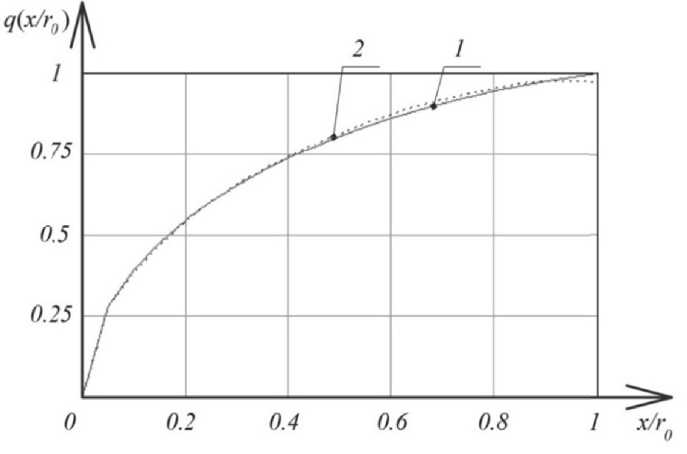
Рис. 4. Графики пропускной способности q ( x ) шланговой задвижки в зависимости от перемещения траверса х, полученные по формулам (8) – кривая 1, и (12) – кривая 2
a2 + 2(0,148 x - 0,794 r0) a + 0,3 x 2 = 0 .
Отсюда a = (0,794r0 - 0,148x) ±
± 7 (0,794 r 0 - 0,148 x )2 - 0,3 x 2 . (10)
В выражении (10) оставляем «+» из условия того, что при х = r 0 , a = r 0 .
Определяя площадь эллипса, получим более точный закон изменения площади пропускного отверстия от перемещения траверса задвижки:
S ( x ) = nxa = nx [(0,794 r 0 - 0,148 x ) +
+ 7(0,794 r 0 - 0,148 x )2 - 0,3 x 2 ] . (11)
при этом 0 ≤ х ≤ r 0 .
Степень открытия шланговой задвижки определяется как относительное изменение пропускной способности по формуле:
q ( x ) = =
-
V nr 0
Полученные данные описывают статическую характеристику задвижки, которая позволяют организовать процедуру автоматического управления при медленных изменениях давления и скорости потока. При быстрых изменениях давления и высоких скоростях потока необходимо учитывать динамические характеристики, связанные с учетом деформационных процессов в жидкости, трубах и подводящей арматуре.
Список литературы Расчет и моделирование регулировочной характеристики шланговой задвижки
- Трубопроводная арматура. URL: http://www.armatek.ru/(дата обращения 20.09.2017)
- Тягунов Ф.Ф. Напорные гидравлические клапаны непрямого действия. М.: компания Спутник, 2004. 70 с.
- Пат. 2551518 Российская Федерация, МПК7B05C7/22. Способ нанесения покрытия на внутреннюю поверхность изделий цилиндрической формы/Скворцов Б.В., Зарецкая М.И., Курылёва П.А.; заявитель и патентообладатель СГАУ.-2014108436; заявл. 04.03.14; опубл. 27.05.15
- Скворцов Б.В., Зарецкая М.И., Борминский С.А. Методы и устройства нанесения покрытий на внутреннюю поверхность труб: Монография. Самара: Издательство СНЦ, 2015. 120 С.
- Skvortsov B.V., Zaretskaya M.I. Automatic Control System for a Pipe’s Inner Surface Coating//Journal of Computer and Systems Sciences International, 2017, Vol. 56, No. 2, pp. 259-267.
- Андреев В.К. О решении одной обратной задачи моделирующей двумерное движение вязкой жидкости//Вестник ЮУгРУ. Серия: Математическое моделирование и программирование. 2016. Т.9. № 4. С. 5-16
- Карабущенко Л.Л. Расчет осесимметричных движений тяжелой жидкости со свободной поверхностью при сильной закрутке потока. М.: Препринт ВЦ РАН, 1998. 20 с.
