Расчет контрольных допусков на параметры динамического объекта

Автор: Овсянников Александр Сергеевич, Бурова Мария Александровна
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Управление и подготовка кадров для отрасли инфокоммуникаций
Статья в выпуске: 3 т.13, 2015 года.
Бесплатный доступ
Рассматривается методика расчета контрольных допусков на параметры динамического объекта по независимым параметрам с учетом памяти результатов контроля.
Контроль, динамический объект, принятие решения, гарантийный допуск, контрольный допуск, память результатов контроля
Короткий адрес: https://sciup.org/140191905
IDR: 140191905 | УДК: 621.391.83.004: | DOI: 10.18469/ikt.2015.13.3.17
Computing of acceptance tolerance for dynamic object parameters
We described method for computing of acceptance tolerance for dynamic objects via independent parameters and by taking into account the memory of control results. The first and second paragraphs are devoted to theoretical background and problem statement. The last paragraph illustrates computing of acceptance tolerance for object parameters under the following suppositions. Stationary, normal and random processes are considered as models of parameter varying in time with regards to dynamical object. Any process is observed during the every parameter variation, and it is considered as an additive mixture of true value and measurement error. Processes of parameter variation in time and measurement error are independent. Every measurements of parameters are saved in memory.
Текст научной статьи Расчет контрольных допусков на параметры динамического объекта
Контроль динамических объектов в зависимости от типа, назначения, сложности и т.д. может осуществляться по одному параметру или по нескольким параметрам. При контроле объекта в процессе эксплуатации принимается решение о его состоянии – допустить ли его к дальнейшей эксплуатации (работоспособен) или не допустить (неработоспособен). Такое решение осуществляется по результатам измерения параметров динамического объекта.
В соответствии с этим процесс контроля состоит из двух этапов: измерение параметров и принятие решения по результатам измерений. При расчете контрольных допусков на параметры объекта в статье учитываются следующие допущения:
-
- в качестве моделей процессов изменения во времени параметров динамического объекта для целей контроля принимаются стационарные нормальные случайные процессы;
-
- наблюдаемый при измерении каждого параметра процесс является аддитивной смесью истинного значения параметра и ошибок измерителя;
-
- процессы изменения во времени каждого параметра и ошибок измерителя независимы друг от друга;
-
- существует память в результатах измерения каждого параметра.
Постановка задачи
Предположим, что параметры динамического объекта независимы друг от друга и для каждого параметра определено поле гарантийного допуска (допуска, определяемого соответствующими нормами и ГОСТ). С учетом этих условий за обобщенный показатель качества W динамического объекта принимается произведение характеристических функций полей гарантийных допусков [1]:
где N – общее количество параметров, по которым контролируется объект; li ( Ui ) – характеристическая функция поля гарантийного допуска i -го параметра, причем считается, что при li ( Ui ) = 1 – объект работоспособен, при li ( Ui ) = 0 – объект неработоспособен;
ных решениях для случаев, когда канал работоспособен и неработоспособен соответственно.
При ^оо — ^i 1 - О и Щй - Я10 — 1 величина C = 1. Для практического применения правило принятия решения (4) можно заменить на более простое [1]
1, приЦ е Д^Д^]; О, приЦ е Д^Д;’],
i = i = 1, N;
где Ui – оценка i -го параметра, полученная при измерении; д^др – нижняя и верхняя границы поля гарантийного допуска i -го параметра.
Для идеального случая, когда не учитывается случайный характер изменения во времени параметров объекта, конечное время измерения и ошибки измерительного прибора, правило принятия решения при контроле объекта по N параметрам будет иметь вид
Y = 1,если W = 1;
У = О, если W = О,
где Y – принимаемое при контроле объекта решение: при Y = 1 – канал работоспособен; при Y = 0 – канал неработоспособен.
Однако в реальности необходимо считаться с ошибками измерений, конечным временем наблюдения за параметрами и случайным характером изменения во времени значений параметров . В этом случае оптимальное, по критерию минимума среднего риска, правило принятия решения будет иметь вид [1]
= 1, если Ц^Х (%,.)>
= 0, еслиР[^1/?’(^)<
1 ,
1 + С’
ТТс’
где Y * – принимаемое решение при оптимальном, по критерию минимума среднего риска, правиле принятия решений; Pi ( Х ? ) – апостериорная вероятность нахождения i-го параметра в поле контрольного допуска при условии наблюдения процесса xi (истинного значения параметра в смеси с ошибками измерения); C – параметр, определяемый потерями:
где П 10 – потери для случая, когда канал работоспособен, а принимается решение о его неработоспособности; П 01 – потери для случая, когда канал неработоспособен, а принимается решение о его работоспособности; П 11, П 00 – потери при правиль-
*
= 1, если U е
I
*
= 0, если U. ^
дЧО^ЧО \\^-л^
i = \,N;
где Ui – оценка i -го параметра канала; – нижняя и верхняя границы поля контрольного допуска i -го параметра.
Значения полей контрольных допусков для каждого параметра определяются решением уравнения
Следовательно, основной задачей синтеза оптимальной системы контроля является определение полей контрольных допусков, которые вычисляются по формуле (7). Рассмотрим решение этой задачи для двух случаев: контроль по независимым параметрам и учет памяти результатов контроля объекта.
Контроль объекта по независимым параметрам без памяти
В качестве модели процесса контроля по N независимым параметрам динамического объекта в [3] предложена модель сложного процесса испытания при независимых частичных испытаниях [4]. С учетом этого предложения правило принятия решения будет иметь вид
*
У
*
У
= 0, если U w.
дЧ0.дЧ0
Д*(О;Д*О-)
/ = 1Л; (8)
где обозначения соответствуют (6). Значения контрольных допусков для каждого параметра объекта определяются решением уравнений
а(^) = -^;^2(^2)^
- рЖ^т-^
где Р* (Л7 ) – апостериорная вероятность нахождения i -го параметра в поле контрольного допуска, при условии наблюдения процесса изменения
значений параметра во времени [5]; Сi – параметр, определяемый обобщенными потерями при принятии конкретных решений по i -му параметру i = 1; 2 … N .
Контроль объекта по независимым параметрам с памятью
Часто при автоматическом контроле динамических объектов интервал измерения параметра (при контроле по одному параметру) Тk меньше интервала автокорреляции ^и процесса изменения значений параметра во времени. В таких случаях при измерениях значений параметров объекта необходимо учитывать избыточность получаемой при измерениях информации о значении измеряемого параметра. В этом случае величина относительного нормированного контрольного допуска на каждый параметр объекта рассчитывается по формулам [4]
—(я) ——(я)
^k = ^k + (Да-1*/?](г));
Да-1 = Да-i + (Аа-2*7^,(т));
Да-2 = Да-2 + (Да-з*7?3(г));(10)
--(и) -- (л)
Да-/ = Аа-/ + (A k-i*Rk (т)), где Да- – нормированный контрольный допуск в k-ый момент времени с учетом памяти n-го порядка; Да – нормированный контрольный допуск в k-ый момент времени без учета памяти; Ла-/ – нормированный контрольный допуск в (k – 1)-ый момент времени с учетом памяти (n – l)-го порядка, l = 0; 1 … ∞; ^А С^") – избыточность величины контрольного допуска в моменты времени k.
Расчет контрольных допусков
Рассмотрим методику расчета контрольного допуска на один параметр динамического объекта. При этом в качестве модели процесса изменения во времени параметра динамического объекта для целей контроля принимается стационарный нормальный случайный процесс. Принятие такой модели для большинства реальных объектов обоснованно, так как на параметры динамических объектов влияет большое количество факторов. Апостериорная вероятность нахождения параметра в поле гарантийного допуска Д^;Д^, входящего в (2), равна интегралу от апостериорной плотности вероятности, взятому с пределами А',0 и А1'1:
^(Z)= ffXal/W, где f\a/Z) – апостериорная плотность вероятности параметра.
Для определения апостериорной плотности вероятности параметра введем следующие предположения, которые при автоматическом контроле канала выполняются достаточно точно:
– наблюдаемый при измерении параметра процесс является аддитивной смесью истинного значения параметра и ошибок измерителя;
– процессы изменения во времени параметра и ошибок измерителя независимы друг от друга.
Независимость процессов изменения во времени остаточного затухания и ошибок измерителя обеспечивается достижением линейности электрических схем измерителя.
Одномерная плотность вероятности параметра принимается распределенной по нормальному закону. Вследствие большого числа составляющих общей ошибки измерителя одномерная плотность вероятностей процесса изменения во времени его ошибок можно аппроксимировать нормальным законом.
При этих условиях апостериорная плотность вероятности остаточного затухания будет распределена по нормальному закону [1]
fZ/Z^

(a-A*)2 2D*
где А * – апостериорное математическое ожидание параметра; D * – апостериорная дисперсия. В выражении (11) А * является оптимальной оценкой остаточного затухания при измерениях:
A =-- 1-- *— a(r)dr, (12)
1 + K 1 + K К Jo v ’ где m – априорное математическое ожидание параметра; V – отношение «сигнал/помеха» при контроле параметра, где в качестве сигнала понимается процесс изменения истинного значения параметра, а в качестве помехи – ошибки измерителя; T – время наблюдения за параметром при измерении; a(τ) – наблюдаемая на интервале времени 0,T смесь истинного значения параметра с ошибками измерителя.
Учитывая, что при контроле динамического объекта на практике часто оценивается не абсолютное значение параметра, а его отклонение от номинального значения, априорное математическое ожидание в (12) равно нулю, и можно записать [5]
* К 1 T
A =---- * — J a(r) dr. (13)
1 + К T 0
Апостериорная дисперсия в (11) определяется
по формуле:
D*
D
1 + Г’
Окончательное выражение для Xu’) будет иметь вид:
px(A ) = Ф ^ A
- A + Ф A
где D – априорная дисперсия параметра.
В выражениях (13) и (14) значение V рассчитывается по формуле [5]
-Zj-1. (21)
v-2L rM ’
Подставляя полученное выражение в формулу
[1] P U) = :---, получаем уравнение для опре-
1 + c деления относительного контрольного допуска на остаточное затухание
где ГN – дисперсия ошибок измерителя. Подставляя (11) в (10), получаем
Ф ^A -A
+ Ф A

1= 1 , (22)
1 + C
xexp<
(a-A*) 2D*
где Ф ( x ) – интеграл вероятности [2]. Введем: – относительные величины допусков
-(i)
Ai

– относительную оценку параметра
– относительное значение переменной интегрирования
где A - величина относительного контрольного допуска.
Для определения контрольного допуска на параметр по формуле (17) вычисляется значение относительного гарантийного допуска по известному гарантийному допуску; в общем случае определяется также значение коэффициента асимметрии поля допуска k .
Далее, исходя из условий эксплуатации динамического объекта, определяются численные значения потерь Пю, ^Ob ^lb ^oo и вычисляется величина C . Значение относительного контрольного допуска определяется путем решения уравнения (22) относитель н о A . Значения полей контрольных допусков Ai(1)+ Д2(1) вычисляются согласно (17) и (18) с учетом коэффициента асимметрии поля допуска k , если поле контрольного допуска несимметрично.
С учетом этого уравнение (22) п римет вид pXZ) = ф(а-(1) - + )-ф(а;(1) -Z^. Введем коэффициент асимметрии поля допуска k ; тогда
«верхний» допуск будет равен £A ,
-(i)
допуск: -A , причем
«нижний»
7 T^ T^ ^A —A2 V tO) 7^ -A =Ai .
—(1)*
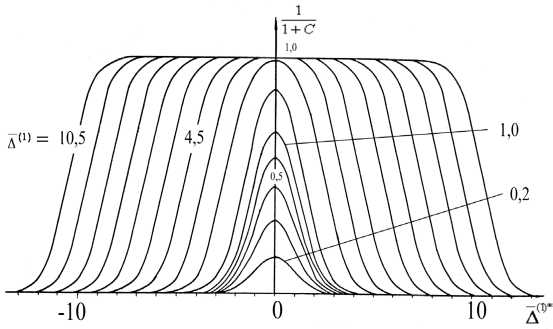
Рис. 2. Функция контрольного допуска A при различных значениях гарантийного допуска A
На рис. 1 поясняется принцип введения коэффициента асимметрии k для допуска на параметр .
A
WH№
^
ЖЖ--------‘--------w
-A 0 ^A
Рис. 1. К введению коэффициента асимметрии k для допуска на параметр
На рис. 2 приведены графики зависимости функции (21) при различных значениях относи
- тельного гарантийного допуска и при k = 1. Как видно из этого рис. 2, эта функция монотонная в области от Z =0 в положительную (или отрицательную) сторону, что позволяет решить уравнение (22) путем нахождения минимума функции
7 —ID —(1)*Л (—(1) —(D* \ 1
Ф £А -А + Ф А + А -1--= О (23)
к 7 к ) 1 + С в диапазоне от Z = 0 до ∞ и –∞ итерационным методом на ЭВМ. С достаточной для практики точностью контрольные допуски при k = 1 можно определить по графикам (см. рис . 2). Значение относительного контрольного допуска определяется на пересечении горизонтальной линии, соответствующей величине 1/(1 + C), с кривой, соответствующей заданной величине относительного гарантийного допуска А . Далее, с учетом формул (10), вводятся поправки в величины контрольных допусков на параметры объекта в тех случаях, когда необходимо учитывать память, а именно когда интервал измерения i-го параметра Тк меньше интервала автокорреляции tи процесса изменения значений параметра во времени .
Выводы
Приводятся теоретические основы расчета контрольных допусков на независимые параметры динамического объекта при его контроле с учетом памяти результатов контроля.
Дана методика расчета контрольных допусков. При этом память не учитывается, но в эти допуски можно внести поправки для учета памяти.
Список литературы Расчет контрольных допусков на параметры динамического объекта
- Бурова М.А., Косолапов А.М., Овсянников А.С. Схема принятия решения для контроля многопараметрического динамического объекта//Материалы XIX РНТК ПГУТИ. Самара, 2012. -C. 223-224.
- Корн Г., Корн Т. Справочник по математике (для научных работников и инженеров). М.: Наука, 1978. -531 с.
- Бурова М.А., Косолапов А.М., Овсянников А.С. Контроль динамического объекта по независимым параметрам//Вестник транспорта Поволжья. №1 (37), 2013. -С. 58-61.
- Бурова М.А., Косолапов А.М., Овсянников А.С. Контроль однопараметрического динамического объекта с памятью//Инфокоммуникационные технологии. Т.12, №2, 2014. -С. 86-88.
- Овсянников А.С. Разработка метода автоматического контроля каналов тональной частоты. Автореф. дисс. к.т.н. М.: МЭИС, 1983. -16 с.
