Расчет манипуляторов с гидравлическим приводом в машинах различного технологического назначения

Автор: Чехутская Н.Г.
Журнал: Агротехника и энергообеспечение @agrotech-orel
Рубрика: Научно-техническое обеспечение процессов и производств в сельском хозяйстве
Статья в выпуске: 1 (1), 2014 года.
Бесплатный доступ
В статье рассматривается расчет манипуляторов с гидравлическим приводом в машинах различного технологического назначения с помощью математического метода, основанного на использовании матрицы поворотов и вектора перемещений.
Манипулятор, гидравлический привод, технологическая машина, исполнительное устройство, модель, матрица поворотов, вектор переноса
Короткий адрес: https://sciup.org/14769986
IDR: 14769986 | УДК: 622.231
Текст научной статьи Расчет манипуляторов с гидравлическим приводом в машинах различного технологического назначения
The summary. In article calculation of manipulators with a hydraulic drive in machines of various technological appointment by means of the mathematical method based on use of a matrix of turns and a vector of movings is considered
Формирование эффективных уравнений динамики манипуляторов технологических машин, которые могут быть рассчитаны на ЭВМ, является одной из важнейших задач в машиностроении. Ее решение необходимо для моделирования динамики манипуляторов в масштабе реального времени, для разработки эффективных алгоритмов управления технологическими машинами с учетом динамики, для повышения эффективности исследования и разработки манипуляторов.
Одним из методов математического моделирования манипуляторов является способ расчета кинематических и динамических величин, определяющих математическую модель манипулятора [1,2]. Для этого используются матрицы поворотов размерности 3x3 и вектора относительных перемещений.
Рассмотрим 3-звенный манипулятор с вращательными шарнирами (рис.1). Для описания его кинематики с каждым из звеньев сформируем систему координат, относительно которой будут рассчитываться параметры звена, а также введем обобщенные координаты, т.е. зададим направления отсчета углов поворота звеньев.
С основанием манипулятора П0 свяжем неподвижную систему координат (СК) S 0 , причем одна из ее осей совпадает с осью первого поворота e rot 1 , а начало находится в центре первого шарнира - точке О 1 .
Теперь построим систему координат S 1 , связанную с первым звеном П 1 . Ее начало выберем в центре первого шарнира. Одну из координатных осей СК S 1 направим по оси первого поворота. Так как ось поворота второго звена e rot 2 ⊥ e rot 1 , то одну из осей в плоскости, перпендикулярной e rot 1 , направим параллельно вектору erot 2 , а третья координатная ось будет дополнять выбранные две до правой ортогональной тройки.
Таким образом, как СК S0 и S1, так и СК S1 и S2 будут иметь одну координатную ось с общим направлением, определяемым для S0 и S1 вектором erot 1 , а для S1 и S2 вектором erot 2 . Поэтому матрицы перехода от S 0 к S 1 и от S 1 к S 2 будут матрицами поворотов относительно соответствующих координатных осей : ξ i ∈ { ξ x, ξ y, ξ z}, где ξ x, ξ y, ξ z - матрицы поворотов относительно осей x , y и z соответственно.
Аналогичным образом определим системы координат S 2 , S 3 оставшихся звеньев манипулятора (S i связана со звеном П i , а ее начало O i находится в центре i-ого шарнира).
Для однозначного определения СК S 1 , .., S n необходимо задать направления отсчета обобщенных координат q 1 , .., q n (q i определяет переход от Si-1 к Si). С этой целью введем вектора e0qi ∈ П i-1 (направлен по одной из координатных осей СК S i-1 , перпендикулярных erot i ) и e1qi ∈ Пi (направлен по одной из координатных осей СК S i , перпендикулярных e rot i ).
Угол qi будем отсчитывать от eqi0 к eqi1 ; положительное
01 направление отсчета определяется поворотом от eqi к eqi
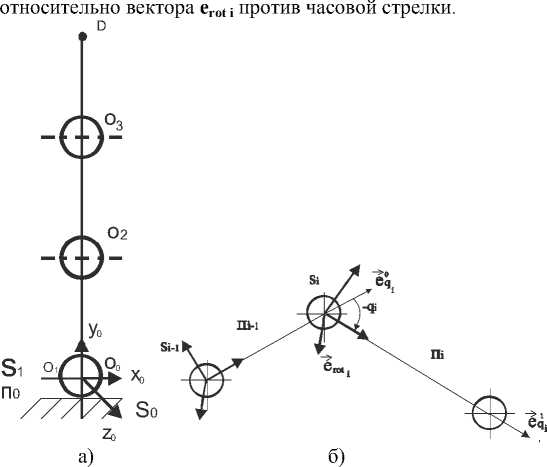
Рис.1. Расчетная схема манипулятора
Для полного кинематического описания манипулятора необходимо определить матрицы поворотов ξ i , задающие ориентацию соседних систем координат Si-1 и Si, и вектора переноса li-1 = Oi-1Oi, определяющие сдвиг между ними (l0 = 0, т.к. O 0 = O 1 ; l n = O n D, где D - конечная точка манипулятора).
Для манипулятора в “начальном” состоянии, т.е. при q 1 = q 2 = ... = q n = 0. Задав СК S 0 (т.е. оси координат х 0 , y 0 , z 0 ), выполним последовательно параллельные переносы S 0 в точки O 1 , O 2 , ..., O n .
При этом будут определены оси систем координат S 1 , ..., S n . и матрицы ξ i и вектора li. для каждого звена.
Затем, при q1 = q2 = ... = qn = 0, найдем направления осей СК звеньев (рис.1) В соответствии с рисунком определены матрицы ξi и вектора li: ξ1 = ξy, ξ2 = ξ3 = ξz, l1 = (l1x;0;0); l2 =(l2x;0;0); l3 =(l3x;0;0)
(l ix , l iy , l iz определяют геометрические размеры звеньев).
Далее получены основные соотношения кинематики манипулятора.
Координаты точки D (выходное звено манипулятора-ударник) могут быть найдены из соотношения:
nn
R D = ∑ l i0 = ξ 1 ξ 2 l 1 + … + ξ 1 ξ 2 … ξ n l n = ∑ ξ 1i l i
i=1 i=1
где принято обозначение ξ 1i = ξ 1 ξ 2 … ξ i l i0 - координаты вектора l i в СК S 0 .
Матрица ξ D = ξ 1n определяет ориентацию точки D в СК (совпадающую с СК Sn) относительно базовой СК S0. Пара (RD, ξ D) задает решение прямой задачи кинематики манипулятора.
Линейная скорость ударника определяется выражением:
VD = RD′ = (ξ1′ξ2 + ξ1ξ2′)l1 +...+( ξ1′ξ2...ξn+..+ ξ1ξ2…ξn′)ln (здесь учтено, что li′ = 0, т.к. эти вектора рассматриваются относительно неподвижных систем координат).
Производные от матриц поворотов можно вычислить с помощью вспомогательных матриц Q i :
ξ i ′ = Q i ξ i q i ′
Введя обозначение: V ps = ξ 1 ξ 2 ... ξ s-1 Q s ξ s ... ξ p
Получим:
n
( ∑ Vps lp) qs′ p=s
V D = V 11 q 1 ′ l 1 +...+ (V n1 q 1 ′ +...+ V nn q n ′ ) l n = ∑ n
s=1
Угловая скорость конечного звена манипулятора по теореме сложения угловых скоростей равна геометрической сумме угловых скоростей звеньев:
nn n
WD = ∑ WS = ∑ erot s0 qs′ = ∑ ξ1s erot s qs′ s=1 s=1 s=1
Далее можно определить матрицу Якоби манипулятора. По определению матрица Якоби манипулятора J(q) связывает вектора V D и W D с вектором обобщенных координат манипулятора q = (q 1 , q 2 , ..., q n ) T :
(V d , W d ) = J(q) q '
Определим компоненты матрицы Якоби:
n
J vs = X V ps i p ;
p=s
Jws = ^1s erot s где Jvs - компоненты первых трех строк матрицы Якоби, Jws -компоненты последних трех строк.
В дальнейшем, при выводе уравнений динамики манипуляторов, используются также выражения для радиус-вектора R i и скорости V i произвольной точки M i i-ого звена манипулятора:
Для вывода уравнений динамики манипулятора используется описание кинематики с помощью матриц поворотов и векторов переноса и уравнения Лагранжа II рода:
d Г dL) dL
= Tk
d (dqk J -\ k
где L = (K - P) - функция Лагранжа, K и P - кинетическая и потенциальная энергия манипулятора; т к - момент обобщенных сил в k-ом шарнире, обусловленный работой привода и воздействием внешних нагрузок.
Чтобы воспользоваться уравнениями Лагранжа, необходимо вычислить кинетическую и потенциальную энергию манипулятора.
Список литературы Расчет манипуляторов с гидравлическим приводом в машинах различного технологического назначения
- Накано Э. Введение в робототехнику, М.: Мир, 1988.
- Hollerbach J. A recursive Lagrangian formulation of manipulator dynamics and comparative study of dynamic complication complexity. IEEE Trans. on SMC, SMC-10, No 11, 1980, c.730-736.
