Расчет на прочность самонастраивающегося гидравлического демпфирующего устройства

Автор: Нгуен Мань Дык , Кузнецов Н.К.
Журнал: Вестник Восточно-Сибирского государственного университета технологий и управления @vestnik-esstu
Статья в выпуске: 1 (40), 2013 года.
Бесплатный доступ
Рассмотрен методический теоретический расчет на прочность самонастраивающегося гидравлического демпфирующего устройства, обладающего свойством самонастройки при изменениях масс и скоростей движения исполнительных механизмов. Излагаются методики определения этих размеров за счет прочностных расчетов и проверки на прочность с помощью программного вычислительного комплекса ANSYS версии 13.
Демпфирующее устройство, гидравлический демпфер, самонастройка, напряжение, прочность детали, расчет на прочность
Короткий адрес: https://sciup.org/142142627
IDR: 142142627 | УДК: 621.01:534
Strength calculation of self-adjust hydraulic damping device
The article conciders methodical theoretical calculations on the strength of a self-tuning hydraulic damping device having the property of self-adjustment when the mass and velocity of motion actuators change. It sets out the method for determining the size at strength analysis and strength test with the help of computer software ANSYS version 13.
Текст научной статьи Расчет на прочность самонастраивающегося гидравлического демпфирующего устройства
Эффективным средством торможения исполнительных механизмов мехатронных систем в условиях изменений масс и скоростей движения является использование самонастраивающихся гидравлических демпфирующих устройств роботов [1]. В работе [2] предложена система автоматизированного проектирования самонастраивающихся гидравлических демпферов, а в работах [3, 4] определены основные конструктивные параметры подобных устройств. При этом некоторые размеры определились из конструктивных соображений, без соответствующих расчетов. В настоящей статье рассматриваются вопросы определения конструктивных размеров самонастраивающихся гидравлических демпфирующих устройств из условий обеспечения достаточной прочности.
Расчетная схема самонастраивающегося гидравлического демпфера показана на рисунке 1. Максимальные напряжения и деформации будут возникать на основных элементах – корпусе 1 и штоках 2 и 3.
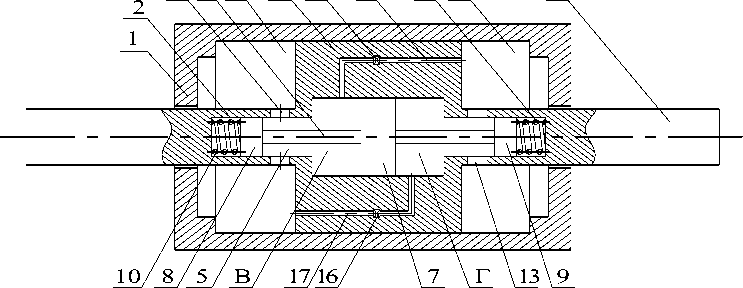
Рис. 1. Гидравлический демпфер:
1 – корпус; 2 и 3 – штоки; 4 – поршень; 5 – осевая полость; 6 – плунжер; 7, 8 и 9 – пояски; 10, 11 – пружины; 12, 13 – отверстия; 14, 16 – дроссели; 15, 17 – каналы; А, Б, В и Г – полости
Расчетная схема корпуса показана на рисунке 2. На этой схеме толщина цилиндрической оболочки предлагается постоянной, а нагрузка – осесимметричной [5, 6].
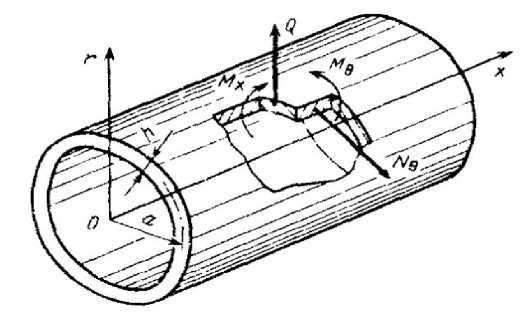
Рис. 2. Силовые факторы в сечениях корпуса демпфера
Получим уравнения радиального прогиба цилиндрического корпуса. Обозначив to(x) - ра- диальное перемещение точек срединной поверхности (положительному значению соответствует перемещение точек на окружность большего радиуса), будем иметь следующее дифференциаль- ное уравнение:
_ d 4 to Eh Eh d 2 ( A T )
C, + to = q + —aT о - Cк (1 + v )tt| a т I, (1)
dx a a dx V h J
Eh 3
где C k = - жесткость корпуса, H/см;
E – модуль упругости материала H/см2;
h – толщина корпуса, см;
a – радиус срединной поверхности, см;
q – распределенная нагрузка, приложенная к срединной поверхности корпуса, H/cм2
(например, внутреннее давление);
a - коэффициент линейного расширения, 1/0С;
T 0 – температура срединной поверхности корпуса, oС;
A T - разность температур наружной и внутренней поверхности корпуса, 0С;
v - коэффициент Пуассона.
Распределение температур по толщине стенки предполагается линейным.
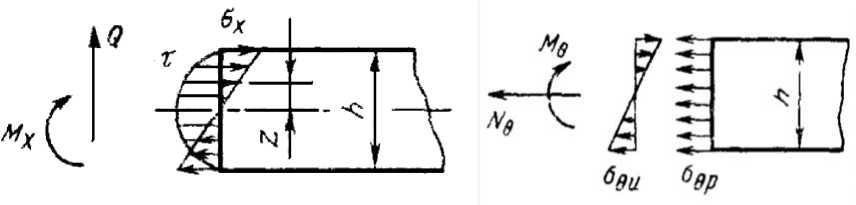
а – в поперечном б – в продольном
Рис. 3. Напряжения в сечениях корпуса демпфера
В поперечном сечении корпуса (сечении, перпендикулярном к оси (рис. 3) на единицу длины действуют:
перерезывающая сила, H/см, Q = C к
d3 to dx3
d ( a A T dy V h
изгибающий момент, Н.см/см m = с xк
d2 to dx2
+ (1 + v )
a A T ^
h J
В продольном сечении (сечение проходящем через ось) на единицу длины приходятся:
растягивающая сила, H/см N 8 = Eh |-- a T 0 I ; (4)
V a J
изгибающий момент, Н.см/см м о = ск
d 2 го dx 2
+ (1 + v )
а A T ) h )
При отсутствии нагрева изгибающий момент в виде M o = v Mx .
Напряжение изгиба в поперечном сечении распределяется по толщине стенки линейно:
с т
12Mx h3
z ,
где z – расстояние от точки до срединной поверхности корпуса.
Касательное напряжение в поперечном сечении определится выражением
Q ( 3 6 z 2 )
т = h ^ 2 h 2 ;
В продольном сечении возникают нормальные напряжения растяжения
С 0 р
и изгиба
с
0 И
N o
h
12 Мо z.
h 3
Из выражений (8) и (9) получим нормальные напряжения в продольном сечении:
с
о
No _ 12 Mo h h3
h
В формулах (6), (7), (9) и (10) для наружного слоя корпуса демпфера z = —, для внутрен- h него z = .
Рассмотрим расчетный случай, когда температурные напряжения отсутствуют ( Т 0 = 0, A T = 0).
Общее решение однородного уравнения (1) представлено в виде го0( х) = e" вх (C1cos вх + C2sin вх), (11)
где величина в определяется равенством (11). Произвольные постоянные C1 и C2 находятся из граничных условий. Для полного решения к величине го0(х) следует добавить частное решение неоднородного уравнения (1). Например, при постоянном по длине внутреннем давлении
qa2. Eh q (рис. 4) это частное решение имеет вид го1 (х)
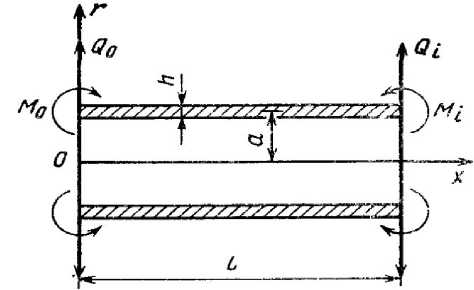
Рис. 4. Схема распределенной нагрузки
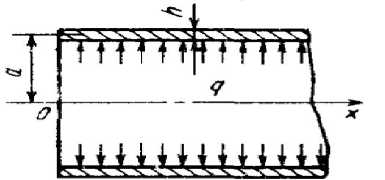
В случае расчета длинного цилиндрического корпуса, который показан на рисунке 4, d2 го „ d 3 го „ , . qa2
х = 0; = 0; = 0; ГО ( х ) = 0; го ( х ) = ; Мх ( х ) = 0.
dx2 dx3 Eh x
Вычислив величину динамического напряжения, мы можем получить условие прочности в виде с т < [ с ] , где [ ст ] — допускаемая величина нормальных напряжений. При этом толщина стенки корпуса определяется по формуле
h > Dp"
2 Ь![ с ] - p
с + p

где p = 1,2pmax – расчетное давление, МПа, а диаметр штоки dsth
На основе полученных зависимостей была произведена проверка на прочность основных элементов гидравлического демпфера, рассматривалось в работе [3]: корпус: длина l = 0,071 м; внешний диаметр Dc = 0,027 м; толщина h = 0,006 м; а в штоке с поршнем: dsht=0,01 м, длина штока lsht = 104 мм (рис. 6 а).
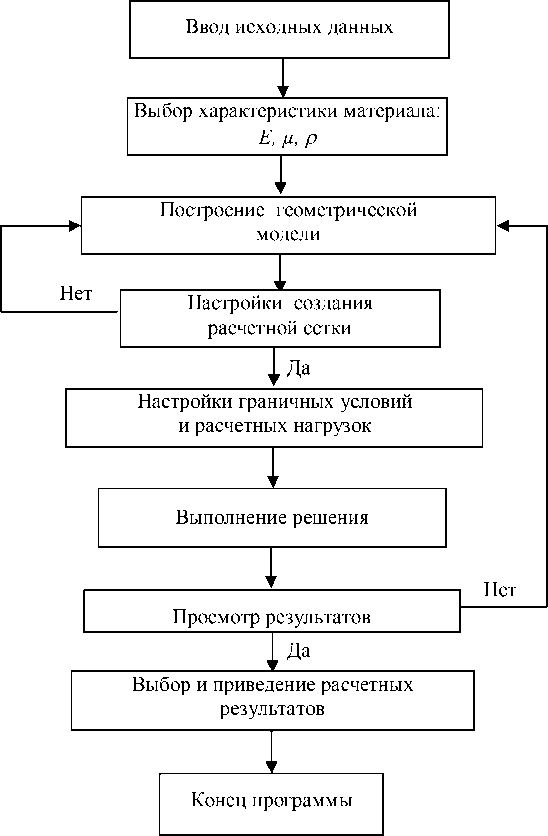
Рис. 5. Схема алгоритма расчеты на прочность в среде Ansys
Проверка производилась и с использованием программного вычислительного комплекса ANSYS версии 13 [7] на основе алгоритма, показанного на рисунке 5.
Для расчета приняты следующие параметры: модуль Юнга материала E = 2,1.e5 МПа; коэффициент Пуассона µ = 0,3; плотность ρ = 7850 кг/м3; допускаемое напряжение (предел прочности) на растяжение и сжатие легированной стали [σ] = 180 МПа [8, 9, 10].
На рисунке 6 б показаны расчетные сетки корпуса и штока. В этом случае выбран минимальный размер одной сетки 1 мм.
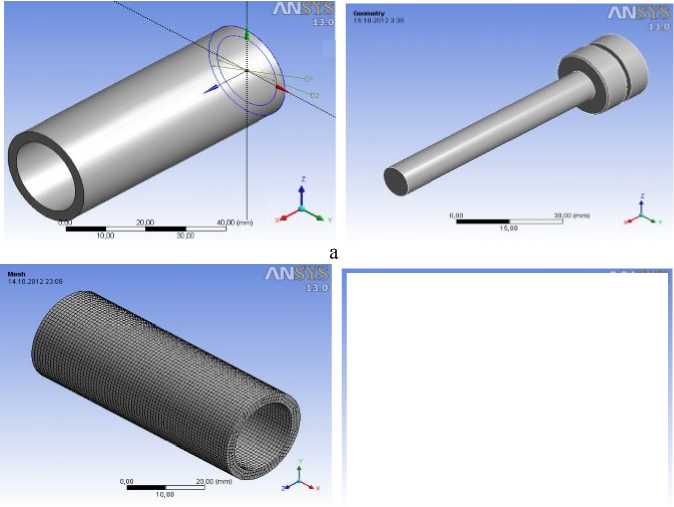
б а – трехмерные модели; б – расчетные сетки
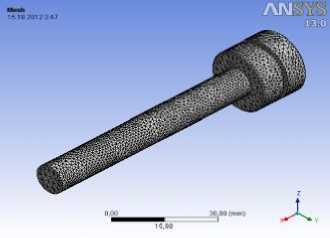
Рис. 6. Модель корпуса и штока с поршнем демпфера:
а
б
в
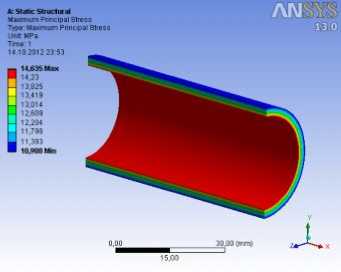
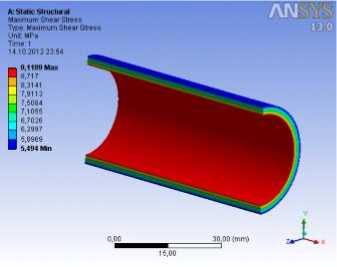
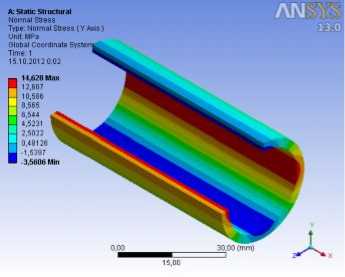
Рис. 7. Состояния напряжений в корпусе и штоке:
а – максимальные главные напряжения;
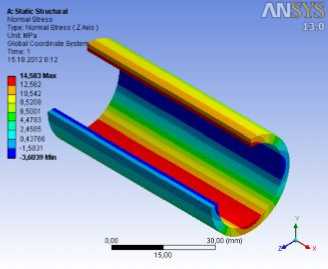
г б – максимальные касательные напряжения;
в – нормальные напряжения по оси y σ y ;
г – нормальные напряжения по оси z σ z
б
в
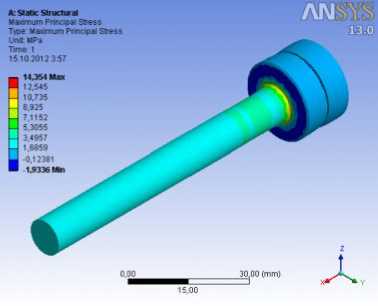
а – максимальные главные напряжения;
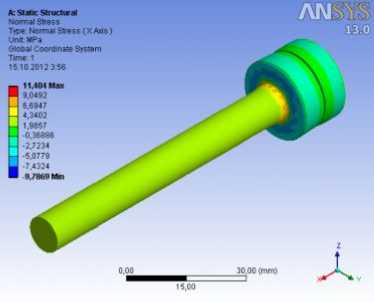
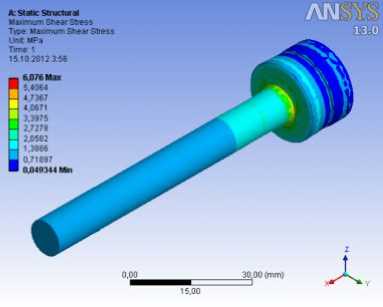
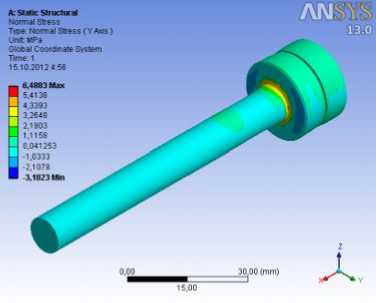
Рис. 8. Состояния напряжений в штоке:
б – максимальные касательные напряжения;
в – нормальные напряжения по оси y σ y ;
а
г – нормальные напряжения по оси x σ x
б
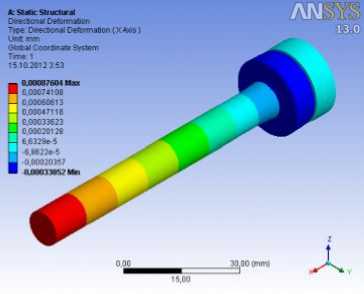
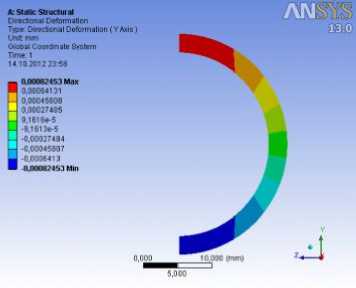
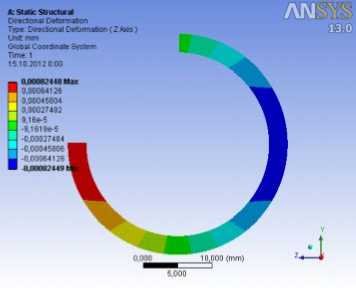
Рис. 9. Состояния деформации корпуса и штоки:
а – радиальная деформация по направлению z; б – радиальная деформация по направлению y; в – осевая деформация по направлению x
Результаты расчетов приведены на рисунках 7–9. Из этих графиков получены максимальные значения напряжений и максимальные значения деформаций точек, возникающих в корпусе: главное напряжение 14,635 МПа; касательное напряжение 9,1199 МПа; нормальное напряжение по оси y σ y = 14,628 МПа и по оси z σ z = 14,583 МПа; радиальная деформация δ r =0,824.103 мм; а в штоке соответственно: 14,354 МПа; 6,076 МПа; σ x = 11,404 МПа; σ y = 6,4883 МПа; осевая деформация δ x = 0,876.10-3 мм.
Из этих результатов видно, что максимальные значения напряжения и деформации точек в основных деталях демпфера оказались меньше допустимых граничных напряжений и деформаций материала демпфера.
Таким образом, исследования показали, что детали обладают достаточной прочностью. В то же время некоторые детали имеют небольшой запас прочности. На основании проведенных исследований программа автоматизирования расчета была дополнена алгоритмами выбора конструктивных параметров самонастраивающихся гидравлических демпферов.
