Расчет несущей способности совмещенных конических опор качения водила планетарно-цевочной передачи типа 2K-V

Автор: Киреев Сергей Олегович, Васильев Борис Николаевич
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 5 (56) т.11, 2011 года.
Бесплатный доступ
Изложен метод определения базовой динамической радиальной грузоподъемности, динамической эквивалентной радиальной нагрузки и нормативной долговечности совмещенных конических опор качения водила в планетарной передаче 2K-V с внецентроидным внутренним цевочным зацеплением на второй ступени. Данные опоры используются при невозможности применения стандартных конических подшипников качения вследствие ограничения габаритных размеров изделия.
Планетарно-цевочная передача, коническая опора качения, несущая способность
Короткий адрес: https://sciup.org/14249602
IDR: 14249602 | УДК: 621.833.6
Capacity rating of integrated cone rolling-contact bearings of 2K-V planetary pin-tooth gear
The estimation method for the basic dynamic radial bearing capacity, the dynamic equivalent radial load and the specified endurance of the integrated cone rolling-contact bearings of the 2K-V planetary pin-tooth gear with the off-centroid internal pin-tooth gear on the second stage is presented. These bearings are applicable in case where no standard cone rolling bearings can be used due to the dimensional specifications of the device.
Текст научной статьи Расчет несущей способности совмещенных конических опор качения водила планетарно-цевочной передачи типа 2K-V
Введение. С начала прошлого века за рубежом в приводах различных промышленных объектов получили признание и широкое применение планетарно-цевочные передачи с внецентроидным внутренним цевочным зацеплением, выполненные по схеме К-Н-V, c неподвижным цевочным колесом и двумя параллельно работающими эпициклоидными сателлитами. Дальнейшее развитие эти планетарные передачи получили в редукторах фирмы «Sier Bath», в которых к передаче K-Н-V была добавлена эвольвентная планетарная ступень с ведущей центральной шестерней [1]. Эвольвентные сателлиты в ней располагались на валах параллельных кривошипов, а водило являлось выходным звеном. По предложению В.Н. Кудрявцева этой передаче присвоено условное обозначение 2K-V. Отличительной особенностью передачи 2K-V является высокая степень упаковки всех деталей, компактность, наличие самоторможения и возможность реализации передаточного отношения от 20 до 500 в одной ступени. В настоящее время эти передачи широко применяются в приводах звеньев промышленных роботов (например, антропоморфные сварочные роботы фирмы «Kuka»).
Наличие нескольких двухэксцентриковых валов дает возможность распределить поток мощности по нескольким направлениям, получить оптимальный вариант распределения нагрузки между эпициклоидными и эвольвентными сателлитами и уменьшить нагрузки, действующие на опорные подшипники. Наличие в данной схеме быстроходной эвольвентной ступени создает благоприятные условия для значительного увеличения передаточного отношения редуктора и также способствует улучшению режима работы подшипниковых узлов.
Однако малые габариты подобного типа редукторов, необходимость применения разнотипных подшипников качения с различной статической и динамической грузоподъемностью, увеличение их количества резко снижают, а в некоторых случаях делают даже невозможным применение в проектируемых подшипниковых узлах серийно выпускаемых стандартных подшипников качения. Это требует индивидуального подхода к выбору типа и конструкции каждого подшипникового узла, входящего в проектируемый редуктор.
Расчет несущей способности совмещенных конических опор качения водила. На рис. 1 показана кинематическая схема одного из вариантов исполнения планетарно-цевочного редуктора, выполненного по трехваловой схеме с быстроходной эвольвентной передачей 3, 1 (на схеме показаны только два эксцентриковых вала 8 из трех). Крутящий момент в данной конструкции снимается с водила 10, которое дополнительно нагружено осевой силой FН и опрокидывающим моментом Мо (рис.2), действующими со стороны исполнительного устройства. Их комплексное действие на водило, приводит к созданию радиальной и осевой нагрузки на опору 5, которые определяют ее тип и необходимую динамическую грузоподъемность. Жесткие требования к габаритам и массе редуктора в данном случае приводят к необходимости совместного изготовления внутреннего кольца подшипника и корпуса водила, а также к применению нестандартного типа конических роликов.
Рис.1. Кинематическая схема планетарного редуктора 2K-V с внецен-троидным внутренним цевочным зацеплением: 1 – колесо зубчатое эвольвентной ступени; 2 – опорный подшипник ведущего вала-шестерни; 3 – ведущий вал-шестерня; 4 – корпус редуктора; 5 – совмещенные конические опоры качения водила; 6 – эпицикло-идный сателлит; 7 – опорные подшипники эпициклоидных сателлитов; 8 – вал эксцентриковый; 9 – опорные подшипники эксцентриковых валов; 10 – водило
Все основные параметры данной опоры качения, в том числе и угол контакта конического ролика с наружным кольцом, а также точки приложения радиальной и осевой нагрузок, необходимые для расчета ее несущей способности и долговечности, могут быть определены только после детальной конструктивной проработки всех деталей редуктора и его конструктивной компоновки. В связи с этим после рекомендуемой [2] разбивки общего передаточного числа проводится полный силовой расчет быстроходной эвольвентой ступени с определением ее межосевого расстояния, окружных сил, радиальных составляющих и подбором опорного подшипника 2 ведущего вала-шестерни. Расчет быстроходной ступени выполняется по моменту, равному моменту на входе вала-шестерни.
Межосевое расстояние быстроходной ступени одновременно определяет расположение эксцентриковых валов и их опорных подшипников 9, которые совместно с эксцентриковыми валами также устанавливаются в корпусе водила. Указанные подшипники нагружены окружными и радиальными силами, возникающими в зацеплении сателлитов эвольвентной ступени с шестерней и определяющими их параметры. Размеры этих подшипников оказывают весьма значительное влияние на ширину эпициклоидных сателлитов цевочной передачи 6, а также на габариты и размеры конических радиально-упорных совмещенных опор качения водила 5 и в связи с этим должны иметь минимальные габариты.
Опорные подшипники 7, несущие эпициклоидные сателлиты 6 на эксцентриковых валах 8, по данным работы [3], являются наиболее нагруженными и их конструктивные параметры принимают в соответствии с необходимыми расчетами. По полученным размерам подшипников определяют, ширину и диаметральные размеры эпициклоидных сателлитов. Его размеры оказывают также существенное влияние на конструктивное исполнение совмещенных конических опор качения водила 5.
Перед компоновкой редуктора необходимо выполнить расчет цевочной ступени и определить все ее основные параметры [4].
Общая компоновка редуктора дает возможность предварительно определить основные параметры и угол контакта конического ролика α (рис.2), которые могут быть уточнены в ходе выполнения его силового расчета. Определяющими при этом являются, как правило, заданные техническим заданием габариты корпуса редуктора, размеры водила и расположение относительно оси его вращения конических роликов, полученное при компоновке. Задают диаметр большего торца конического ролика и его длину. При этом учитывают характер и уровень действующих на опору сил, необходимость обеспечить достаточные геометрические параметры наружного кольца совмещенной опоры по условиям технологической жесткости и прочностным характеристикам, а также возможность исполнения беговых дорожек в теле водила, выполняющих роль внутренних колец совмещенных опор качения.
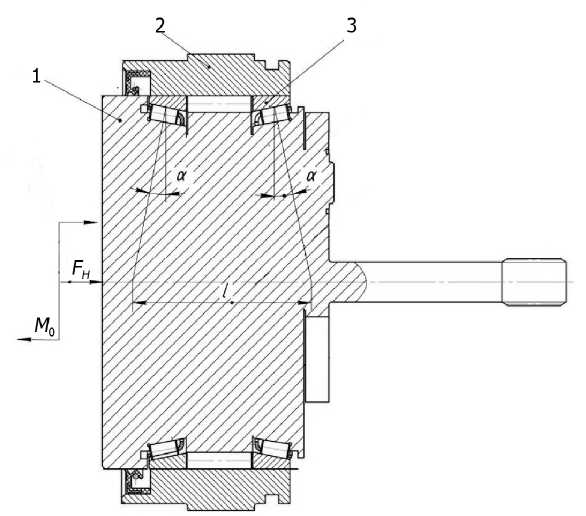
Рис.2. Общая компоновка совмещенных конических опор качения водила планетарноцевочного редуктора 2K-V: 1 – водило в сборе с комплектующими узлами и деталями; 2 – корпус редуктора; 3 – совмещенная коническая опора качения водила; α – угол контакта конического ролика; М о – опрокидывающий момент; FH – внешняя осевая сила; l – расстояние между точками приложения опорных реакций
Затем на оси вращения водила определяют точки приложения опорных реакций и расстояние l между ними (рис.2). С учетом полученных размеров, строят схему нагружения совмещенных конических опор качения водила (рис.3) и рассчитывают радиальные и осевые нагрузки, действующие в опорных узлах.
Значения показанных на расчетной схеме радиальных сил, действующих в опорах от опрокидывающего момента, определяют по формуле:
M о
F rA = F rБ = l .
где F rA и F rБ – радиальные опорные реакции, действующие в опорах.
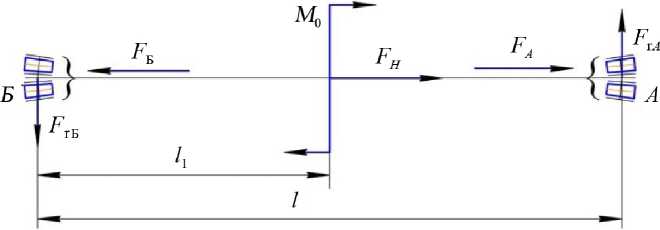
Рис. 3. Схема действия сил в опорных узлах водила
Дополнительные осевые составляющие F А и F Б зависят от радиальных сил F rА и F rБ и коэффициента осевого нагружения е и для конических радиально-упорных подшипников могут быть определены по зависимостям [5]:
e = 1,5tg a ; F = 0,83 eF rA ; F^ = 0,83 eF ^.
С учетом действия осевой силы F Н максимальным для данной схемы нагружения будет усилие в опоре А, которое выражается как
F А = F А + F Н = 0,83 eF rA + F Н .
Базовая динамическая радиальная грузоподъемность для каждой из совмещенных радиально-упорных конических опор качения водила может быть определена по зависимости [5]:
Cr = bm f c (iLw. cosaf Z3/4DW^27, где Cr – базовая динамическая радиальная грузоподъемность, Н; bm – коэффициент, характеризующий свойства стали с учетом способа ее изготовления (для конических роликов bm=1,1); fc – коэффициент, зависящий от геометрии деталей подшипника, точности их изготовления и материала; i – число рядов роликов в подшипнике; LWe – длина ролика для расчета грузоподъемности, мм; Z – число роликов в однорядном подшипнике; DWe – диаметр ролика, мм.
Коэффициент f c определяется по табличным данным в зависимости от отношения
Dw cos a e [5], где D – диаметр окружности центров комплекта роликов, мм. Например, при
D p W p W
Dw cos a значении отношения e , D p W
равном 0,0438 для разработанного варианта планетарной пере- дачи 2K-V с внецентроидным внутренним цевочным зацеплением, имеющего обозначение ПЦР 3–36(6), коэффициент fc составляет 64,09.
Динамическая эквивалентная радиальная нагрузка для наиболее нагруженной опоры А при α ≠0 определяется по формуле [5]:
P = (ХVFr + YFА)KбKт, где P – эквивалентная радиальная нагрузка, Н; X и Y – коэффициенты радиальной и осевой нагрузки. Если Fa/(VFr)<е, тоX=1, Y=0; если Fa/(VFr)>e, то X=0,4, Y=0,4ctga; V- коэффициент вращения; Fr – радиальная нагрузка и FA – максимальная осевая нагрузка, действующие на опору А, Н; Kб – коэффициент безопасности, принимаемый при умеренных перегрузках до 150% от 1,3 до 1,8; Kт – температурный коэффициент, принимаемый при температуре до 100 °С равным 1.
Полученные значения динамической грузоподъемности С и эквивалентной радиальной нагрузки P используют для определения ресурса подшипника [5]:
_ 10 6 (
60 n (
C P где Lh – долговечность подшипника, ч; n – частота вращения водила, мин–1.
Заключение. Получаемое значение долговечности рассматриваемого подшипника сравнивают с требуемой и, в случае несоответствия, уточняют параметры конического ролика и угол контакта α с последующим повторением силового расчета и определением ресурса работы подшипника с уточненными параметрами. По подобной методике могут быть определены параметры и других совмещенных опор качения, установка в которых стандартных подшипников по тем или иным причинам оказывается невозможной.
Список литературы Расчет несущей способности совмещенных конических опор качения водила планетарно-цевочной передачи типа 2K-V
- Киреев С.О. Структура, кинематика и геометрия планетарных передач с внецентроидным цевочным зацеплением/С.О. Киреев, В.Н. Ковалев. -Новочеркасск: НГТУ, 1995. -98 с.
- Киреев С.О. Кинематический синтез гаммы планетарных передач/С.О. Киреев, Н.В. Бабец//Основы конструирования машин: сб. науч. тр. -Новочеркасск, 1994. -С.73-79.
- Киреев С.О. Силовой анализ планетарной 2K-V передачи/С.О. Киреев, В.Н. Ковалев//Изв. вузов. Северо-Кавк. регион. Техн. науки. -1993. -№3-4. -С.45-50.
- Киреев С.О. Параметрический синтез гаммы передач 2K-V на стадии эскизного проектирования/С.О. Киреев, В.Н. Ковалев, В.П. Степанов//Проблемы машиностроения и надежности машин. -1993. -№5. -С.83-89.
- Перель Л.Я. Подшипники качения. Расчет, проектирование и обслуживание опор: справочник/Л.Я. Перель, А.А. Филатов. -М.: Машиностроение, 1992. -450 с.
