Расчет параметров движения приводов механизма параллельной структуры

Автор: Мирзаев Роман Александрович, Смирнов Николай Анатольевич, Смирнов Александр Николаевич
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 5 (38), 2011 года.
Бесплатный доступ
Выполнен расчет положения выходного звена в механизме параллельной кинематики. Создана компьютер- ная модель для анализа движения дельта-механизма. Получены данные о крайних положениях устройства па- раллельной структуры. Найдена система уравнений, описывающая зависимость координат выходного звена от обобщенных координат.
Приводы механизмов, устройства параллельной кинематики, кинематические цепи, мехатроника
Короткий адрес: https://sciup.org/148176718
IDR: 148176718 | УДК: 621.01
Calculation of motion drive of parallel mechanism
The authors present the solution of a problem of calculation of the output link in a mechanism of parallel kinematics and developed a computer model for analysis of motion of delta mechanism. Data on the limit positions of the device of parallel structure are achieved and the system of equations, describing the correlation between the output links of the main coordinates, is found.
Текст научной статьи Расчет параметров движения приводов механизма параллельной структуры
В настоящее время в таких перспективных отраслях промышленности, как ракетно-космическая техника и станкостроение, актуальной является задача увеличения точности приводов ориентирующих устройств. Обычно для решения этой задачи используются многозвенные рычажные или гибкие манипуляторы [1; 2].
Серьезным недостатком таких манипуляторов является их небольшая жесткость, снижающая точность отработки заданных перемещений и затрудняющая управление приводами. Для устранения указанных недостатков разработаны механизмы с параллельной структурой (дельта-механизмы). Однако применение таких механизмов невозможно без решения прямой и обратной задачи кинематики манипуляторов, которое усложняется наличием нескольких кинематических цепей, налагающих ограничения на перемещения выходного звена [3].
Для решения прямой и обратной задачи кинематики манипуляторов применяются два подхода: компьютерное моделирование (рис. 1) и аналитический расчет [4].
Рис. 1. Компьютерная модель дельта-механизма
Рассмотрим дельта-механизм, содержащий три кинематические цепи, каждая из которых состоит из цилиндрического и сферического шарниров (рис. 2).
Для кинематического анализа дельта-механизмов применяется формула Сомова-Малышева [6]. Общее число H степеней подвижности механизма относительно неподвижного звена (основания) для про- странственной кинематической структуры определяется по формуле
Н = 6·(k – 1) – 5p1 – 4p2 – 3p3 – 2p4 – p5, где k – общее число звеньев кинематической цепи; pi – число пар с i степенями свободы.
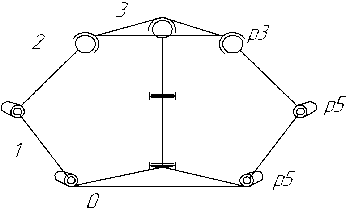
Рис. 2. Схема дельта-механизма [5]:
0 , 1 , 2 , 3 – звенья кинематической цепи; p 3 – сферический шарнир; p 5 – цилиндрический шарнир
Число степеней свободы для модели дельтамеханизма, изображенной на рис. 4, равно трем: две вращательные и одна поступательная.
После определения степеней подвижности дельтамеханизма, при помощи компьютерного моделирования была решена задача нахождения крайних положений выходного звена.
При применении устройств параллельной кинематики для ориентации антенн и телескопов космической техники главным параметром является угол наклона выходного звена Ω с координатами X 1 , Y 1 , Z 1 относительно координат основания X 0, Y 0, Z 0. Графики углового перемещения, полученные при компьютерном моделировании движения дельта-механизма, приведены ниже (рис. 3 - 5).
Задача определения положения выходного звена манипулятора может быть решена не только при помощи компьютерного моделирования, но и аналитически (рис. 6).
Прямая задача кинематики манипуляторов сначала решается для одной кинематической цепи ( l 1, l 2, l 3), при этом другие кинематические цепи, состоящие из звеньев l ′ 1, l ′ 2, приняты статичными. Затем аналогичный расчет проводится и для остальных кинематических цепей.
Вестник Сибирского государственного аэрокосмического университета имени академика М. Ф. Решетнева
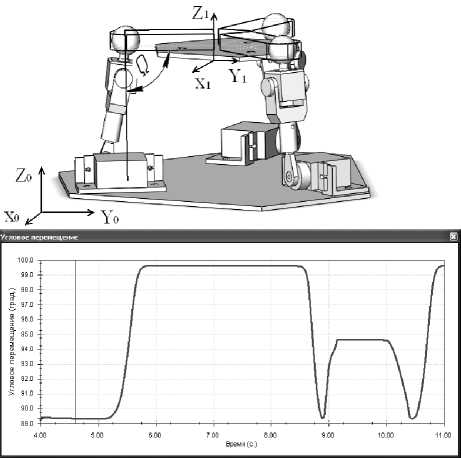
Рис. 3. Крайнее верхнее положение выходного звена дельта-механизма
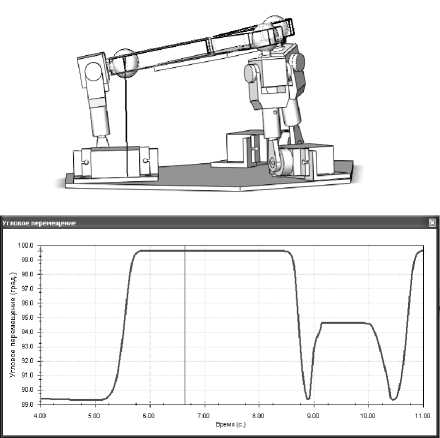
Рис. 4. Промежуточное положение выходного звена
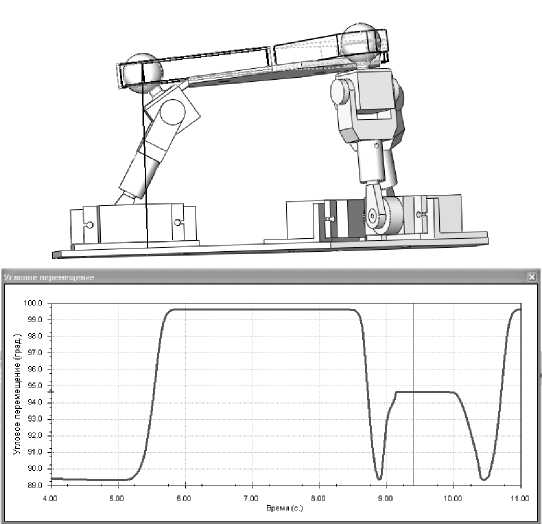
Рис. 5. Крайнее нижнее положение выходного звена
В результате будут получены функции зависимо-
сти координаты выходного координат кинематической щейся в плоскости ZOY :
звена Ω от обобщенных цепи φ 1 , φ 2 , φ 3 , находя-
y : В - 1 1 • cos(ф1) - 1 2 • cos(ф2
-
— п + ф 1 ) - 1 3 • sin(Q) = 0,
z : 1 1 • sin(ф1) + 1 2 • sin(ф2 - — n + Ф 1 ) - 1 3 • cos(Q) = H,
3n- — п-ф1 -ф— -фз = ^-
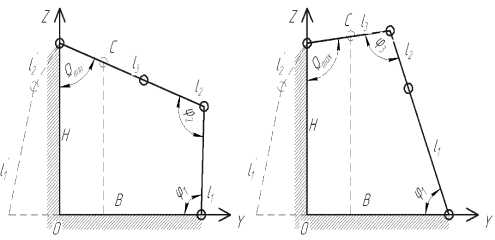
Для нахождения координат в крайних положениях механизма целесообразно перестроить механизм так, как показано на рис. 7.
Минимальное значение угла Ω (рис. 7, а ) рассчитывается с помощью системы
У : В - 1 1 • СО8( ф ! ) - ( 1 — + 1 з ) • sin( Q mln ) = 0,
< z : 1 1 • sin( ф 1 ) - ( 1 2 + 1 3 ) • cos( Q min ) = H ,
2п- — Л-Ф 1 -Ф 2 =Om n .
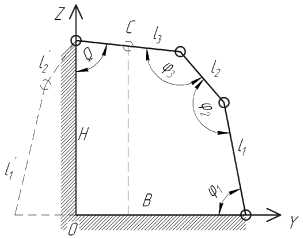
Рис. 6. Расчетная схема дельта-механизма:
l 1 , l 2 ,l 3 — подвижные звенья кинематической цепи; l ' 1 , l'2 - зафиксированные звенья; φ 1 , φ 2 , φ 3 – углы поворота звеньев;
Ω – угол поворота выходного звена; С – центр выходного звена
а
б
Рис. 7. Расчетная схема дельта-механизма в крайних положениях:
а – Ω min ; б – Ω
max
Максимальное значение угла Ω (рис. 7, б ) определяется решением системы
y : B - ( l i + 1 2 ) • cos( V 1 ) - 1 3 • sm( Q max ) = 0, < z : ( 1 1 + 1 2 ) • SiB( 9 i ) - 1 3 • COS( Q max ) = H ,
2n--2 Л-Ф1 -Фз =Qmax.
Таким образом, нами выполнен расчет положения выходного звена в механизме параллельной кинематики. Создана компьютерная модель для анализа движения дельта-механизма. Получены данные о крайних положениях устройства параллельной структуры. Найдена система уравнений, описывающая зависимость координат выходного звена от обобщенных координат кинематической цепи.
