Расчет силовых и кинематических параметров передаточного механизма на основе цепи скручивающихся рычагов

Автор: Бондаренко И. Р., Волошкин А. А., Перевузник В. С., Ковалев Л. А.
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Механика
Статья в выпуске: 2 т.22, 2022 года.
Бесплатный доступ
Введение. В работе представлены краткий кинематический анализ, а также применение принципа Даламбера к нахождению зависимости между силовыми параметрами в передаточном механизме роботизированного манипулятора, построенном из цепи скручивающихся рычагов. Применение данного передаточного механизма позволит повысить ресурс привода манипулятора, точность его позиционирования, увеличить рабочую нагрузку по сравнению с использованием приводов на гибких связях (скручивающихся нитях). Целью работы являлось получение зависимостей между перемещениями элементов цепи, а также их силовыми параметрами, необходимых для контроля работы системы управления данными устройствами.Материалы и методы. В ходе решения задачи рассмотрен элементарный сегмент (элемент) приводной цепи. Для нахождения зависимости между нагрузками в элементе использован принцип возможных перемещений. При нахождении кинематических связей между перемещениями проведен краткий геометрический анализ элемента передаточной цепи. Для проведения сравнительного анализа полученных аналитических зависимостей применён метод имитационного моделирования, реализованный на графической модели звена с использованием программного пакета NX.Результаты исследования. В ходе исследования получены зависимости для определения величины момента, развиваемого на входном звене в зависимости от внешней рабочей нагрузки и угла его поворота, а также для определения линейного перемещения выходного звена. Построена имитационная модель приводного элемента, которую возможно применить в динамическом исследовании механизма привода с учетом инертности звеньев.Обсуждение и заключения. Из полученных аналитических зависимостей установлено значение угла поворота входного звена элемента механизма, при котором достигается максимальное значение величины крутящего момента для фиксированной рабочей нагрузки на выходной элемент, а также максимальное линейное перемещение выходного звена. Расчетные значения находятся в хорошем соответствии с аналогичными величинами, полученными по результатам имитационного эксперимента, что говорит о возможности применения аналитических зависимостей при формировании системы управления роботов. Кроме того, данные зависимости позволяют обеспечить подбор приводных устройств с необходимыми силовыми показателями
Манипуляторы, гибкие связи, приводной элементарный сегмент, жесткие рычаги, принцип возможных перемещений, крутящий момент, имитационный эксперимент
Короткий адрес: https://sciup.org/142235256
IDR: 142235256 | УДК: 531.011:531.8 | DOI: 10.23947/2687-1653-2022-22-2-91-98
Calculation of the force and kinematic parameters of the transfer mechanism based on a twisted arm chain
Introduction. The paper presents a brief kinematic analysis, as well as the application of D'Alembert's principle to finding the relationship between the force parameters in the transmission mechanism of a robotic manipulator constructed from a twisted arm chain. The use of this transfer mechanism can enhance the life of the arm actuator, the accuracy of its positioning, and increase the workload compared to the flexible linkage actuators (twisted strings). The work aimed at obtaining dependences between the displacements of circuit elements, as well as their force parameters required to monitor the control system operation of these devices.Materials and Methods. In the course of solving the problem, an elementary segment (element) of the transmission chain was considered. To find the relationship between the loads in the element, the virtual displacement principle was used. When finding kinematic connections between displacements, a brief geometric analysis of the transmission chain element was carried out. To conduct a comparative analysis of the analytical dependences obtained, a simulation technique implemented on a graphical link model using the NX software package was applied.Results. In the course of the study, we obtained dependences for determining the magnitude of the moment developed on the input link, depending on the external workload and its rotation angle, as well as for defining the linear displacement of the output link. A simulation model of the actuator was constructed, which can be applied in the dynamic study of the actuator mechanism, taking into account the inertia of the links.Discussion and Conclusions. From the obtained analytical dependences, we determined the value of the angle of rotation of the input link of the mechanism element, at which the maximum torque value for a fixed workload on the output element was achieved, as well as the maximum linear displacement of the output link. The calculated values were in good agreement with similar values obtained from the results of the simulation experiment, which gave us the possibility of using analytical dependences in the formation of a robot control system. In addition, these dependences made it possible to provide the selection of actuators with the required force indicators.
Текст научной статьи Расчет силовых и кинематических параметров передаточного механизма на основе цепи скручивающихся рычагов
Механика
Original article
Calculation of the force and kinematic parameters of the transfer mechanism based on a twisted arm chain
Ivan R. Bondarenko M, Artem A. Voloshkin , Victoria S. Perevuznik , Leonid A. Kovalev
Belgorod State Technological University named after V. G. Shukhov, 46, Kostyukova St., Belgorod, Russian Federation
Introduction. The paper presents a brief kinematic analysis, as well as the application of D'Alembert's principle to finding the relationship between the force parameters in the transmission mechanism of a robotic manipulator constructed from a twisted arm chain. The use of this transfer mechanism can enhance the life of the arm actuator, the accuracy of its positioning, and increase the workload compared to the flexible linkage actuators (twisted strings). The work aimed at obtaining dependences between the displacements of circuit elements, as well as their force parameters required to monitor the control system operation of these devices.
Materials and Methods. In the course of solving the problem, an elementary segment (element) of the transmission chain was considered. To find the relationship between the loads in the element, the virtual displacement principle was used. When finding kinematic connections between displacements, a brief geometric analysis of the transmission chain element was carried out. To conduct a comparative analysis of the analytical dependences obtained, a simulation technique implemented on a graphical link model using the NX software package was applied.
Results. In the course of the study, we obtained dependences for determining the magnitude of the moment developed on the input link, depending on the external workload and its rotation angle, as well as for defining the linear displacement of the output link. A simulation model of the actuator was constructed, which can be applied in the dynamic study of the actuator mechanism, taking into account the inertia of the links.
Discussion and Conclusions. From the obtained analytical dependences, we determined the value of the angle of rotation of the input link of the mechanism element, at which the maximum torque value for a fixed workload on the output element was achieved, as well as the maximum linear displacement of the output link. The calculated values were in good agreement with similar values obtained from the results of the simulation experiment, which gave us the possibility of using analytical dependences in the formation of a robot control system. In addition, these dependences made it possible to provide the selection of actuators with the required force indicators.
Введение. В последнее время начали приобретать популярность устройства, основанные на закручивании кабелей или нитей. Данные изобретения универсальны в использовании и востребованы в различных направлениях робототехники. Например, при изготовлении манипуляторов, захватов и экзоскелетов 1 [1–4]. Приводные конструкции, основанные на скручивании гибких элементов, имеют ряд преимуществ. К ним относятся: размеры устройства, простота сборки и установки, универсальность. Так, например, мехатронный привод на скрученных нитях, представляющий собой электромеханическое устройство с числовым программным управлением, способен самостоятельно отслеживать состояние рабочего органа на основе данных, полученных с датчика положения вала и датчика силы.
В представленной работе авторами проводится кинематический и силовой анализ передаточного механизма привода, построенного на основе цепи скручивающихся рычагов. Данная конструкция предназначена для замены приводных устройств, применяющих гибкие передаточные связи, а именно скручивающиеся кабели и нити.
Экспериментальное устройство, показанное на рис. 1, состоит из электродвигателя и нескольких нитей, ориентированных вдоль оси вращения двигателя. Нити связывают выходной вал двигателя с моделируемой нагрузкой, создаваемой другим электродвигателем. Управление нагрузкой (линейным двигателем) позволяет рассматривать данную систему как пружинно-амортизирующее устройство с регулируемыми параметрами.
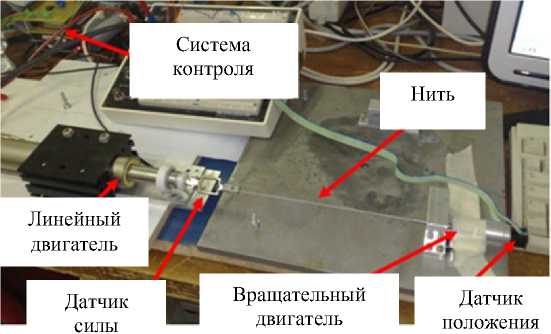
Рис. 1. Экспериментальная установка [4]
Благодаря приводу на основе скручивания нитей удалось разместить все приводы и двигатели в протезе руки при условии, что обеспечены все основные степени подвижности руки [5–8]. При этом наиболее слабым местом системы является гибкий кабель или нить. Износ и растяжение скручивающейся нити являются ключевыми недостатками данного типа приводов.
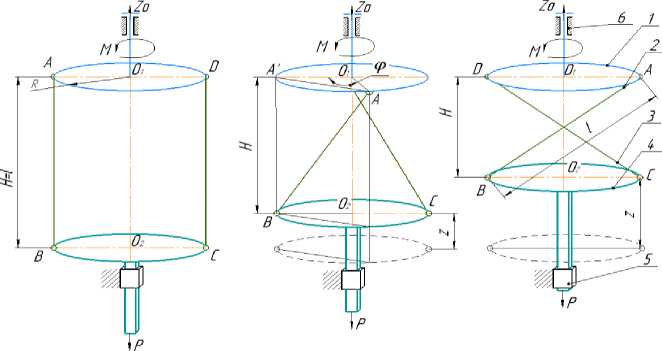
Альтернативным решением данной проблемы может стать замена скручивающихся нитей или кабелей на рычажную систему в виде цепи. Заменим фрагмент скручивающихся нитей или кабелей элементом (сегментом) из жестких рычагов (стержней), которые шарнирно соединяют между собой две окружности радиусом R и центрами O 1 и O 2 (рис. 2 а ) . Входное звено 1 удерживается подпятником 6 и имеет возможность вращательного движения относительно центра O 1 , находящегося на оси Z O . При этом нижняя окружность 4 (выходное звено) может совершать поступательное движение вдоль оси Z O ввиду наличия направляющей 5 . В результате вращения верхней окружности рычаги 3 и 4 совершают сферическое движение относительно звена 1 , изменяя тем самым расстояние l и перемещая рабочую нагрузку P (рис. 2 б, в ).
Механика
а ) б) в)
Рис. 2. Схема сегмента приводной цепи: а — в начальном положении; б — в промежуточном положении; в — в предельном положении
Для практической реализации данного конструктивного решения необходимо наличие системы управления, основанной на математической модели приводного устройства, которая отражает кинематические и силовые связи между элементами приводной цепи.
Целью данной работы было нахождение кинематических и силовых связей в элементарном сегменте приводной цепи.
Материалы и методы. Решение поставленной задачи предлагается найти с помощью принципа возможных перемещений [9], позволяющего исключить из рассмотрения внутренние силы в звеньях приводного элемента.
Таким образом, в рассмотрении остаются крутящий момент, приложенный к входному звену, а также приложенная к выходному звену рабочая нагрузка P . Учитывая схему, представленную на рис. 4 б , в качестве обобщенной координаты для входного звена принимаем угол поворота φ , а для выходного — линейное перемещение z [10].
В соответствии с принципом возможных перемещений [11] составим уравнение работ:
Мбф - POz = 0, (1)
где δφ — вращательное возможное перемещение входного звена, δz — линейное возможное перемещение выходного звена.
Расстояние между H звеньями 1 и 2 связано c линейным перемещением z звена 2 , с учетом длины рычага AB = l, зависимостью H = l - z . Тогда с учетом схемы, предоставленной на рисунке 4 б, можем записать:
Величина z в зависимости от угла поворота φ определится как:
z = l
В соответствии с [11] связь между возможными перемещениями можно установить как:
. df ( Ф )^
oz =-----оф .
d ф
Тогда, взяв производную “фот (2) и выполнив преобразования, получим зависимость между возможными перемещениями:
O z =
R2 sin ф оф.
l 2 -| 2 R sin | ф
I 1 2
Подставив δz в уравнение работ (1), получим:
М 8ф - P
R 2 sin ф
бф = 0,
откуда сократив на δφ выразим момент M как функцию угла поворота φ в виде:
PR 2 sin ф

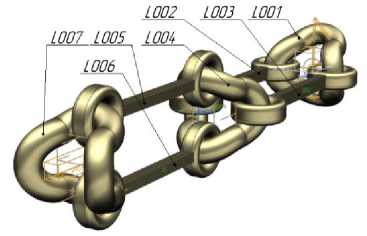
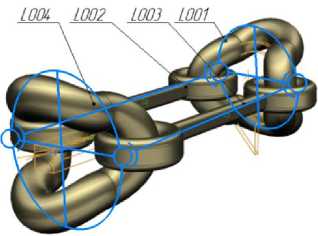
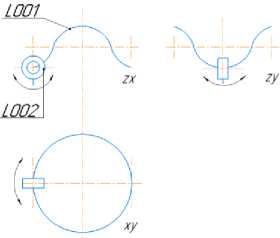
Для проведения оценки полученных аналитических зависимостей момента (3), развиваемого на входном звене и линейного перемещения выходного звена от угла поворота (2), был проведён имитационный эксперимент [12, 13], реализованный в программной среде NX Nastran [14]. С этой целью была построена трехмерная твердотельная модель участка приводной цепи (рис. 3 а), состоящего из двух последовательно соединенных элементарных сегментов исследуемого механизма. Один из сегментов приводного механизма (рис. 3 б) был использован для проведения расчета со следующими параметрами R = 12 мм, l = 54 мм. При построении модели сферические шарниры были представлены в виде торовых шарниров, что позволило выполнить элементы цепи в виде изогнутых колец, соединенных жесткими рычагами (рис. 3). Данное конструктивное исполнение позволяет рычагам совершать сферическое движение. Так как данная связь обеспечивает рычагам требуемую степень свободы, можно считать её соответствующей сферическому шарниру (рис. 3 в).
-
а) б) в)
Рис. 3. Трехмерные твердотельные модели: а — участка цепи из двух сегментов; б — сегмента цепи; в — проекции сложно изогнутого кольца
В разработанной трехмерной модели были назначены кинематические связи, определены центры масс звеньев, а также задана рабочая нагрузка P = 100 Н, после чего была проведена симуляция движения элементарного сегмента приводной цепи в NX Nastran [14, 15]. Параметры модели сегмента приведены в таблице 1.
Таблица 1
Параметры моделирования
|
№ связи в симуляции |
Момент инерции относительно каждой из осей, кг · мм ² |
Масса, кг |
Начальная координата центра масс, мм |
Название |
||||
|
IX |
IY |
IZ |
X |
Y |
Z |
|||
|
L001 |
5,51 |
4,18 |
4,18 |
0,04 |
0 |
1,63 |
209 |
Изогнутое кольцо сложной формы |
|
L004 |
0 |
1,63 |
139,5 |
|||||
|
L007 |
0 |
1,63 |
69,8 |
|||||
|
L002 |
0,03 |
12,9 |
173,4 |
0,02 |
–0,03 |
–12,9 |
173,4 |
Рычаг |
|
L003 |
–0,03 |
12,9 |
173,4 |
|||||
|
L005 |
12,9 |
1,5 |
103,7 |
|||||
|
L006 |
–12,9 |
1,5 |
103,7 |
|||||
Результаты исследования. В соответствии с полученными аналитическими зависимостями для величины линейного перемещения z, а также крутящего момента M , был выполнен расчет, произведенный в среде MathCAD, результаты которого представлены на рис. 4. Расчет был выполнен при следующих исходных данных: рабочая нагрузка P = 100 Н, радиус входного и выходного звена R = 12 мм, длина рычага R = 12 мм, диапазон изменения угла поворота φ входного звена в пределах 0–180°.
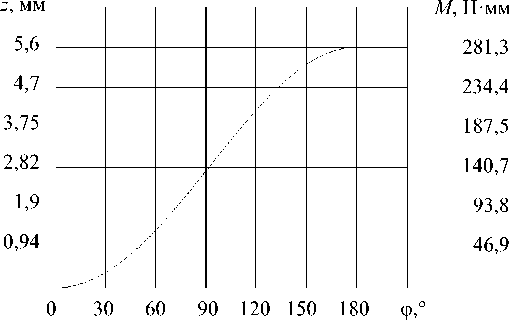
а)
Рис. 4. Зависимости исследуемых величин от угла поворота: а — линейного перемещения выходного звена; б — крутящего момента M на входном звене
0 30 60 90 1 20 150 180
φ,°
б)
Механика
Из представленных графических зависимостей можно установить, что максимальная величина перемещения достигается при угле поворота, приближающимся к 180° и составляет 5,6 мм, а величина крутящего момента принимает максимальное значение 281,3 Н·мм при угле поворота φ = 93°.
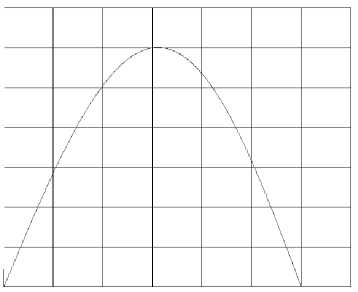
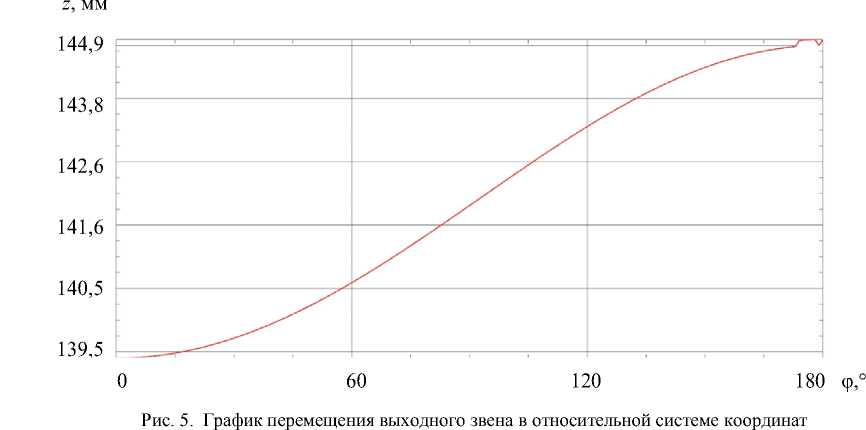
В результате имитационного моделирования получен график перемещения выходного звена L004 в зависимости от поворота приводного звена L001 (рис. 5). Перемещение элементарного сегмента рычажного механизма происходит до тех пор, пока не произойдет касание правого и левого рычагов в крайнем положении. Так как рычаги имеют объем, полный поворот выходного звена невозможен из-за касания боковой поверхности, что также отображено на графике (рис. 5). Для достижения полного поворота необходимо изменить строение рычага на более сложную форму. На рис. 6 представлена зависимость крутящего момента при повороте сегмента цепи расчетной модели на 180 ° .
M , Н·мм
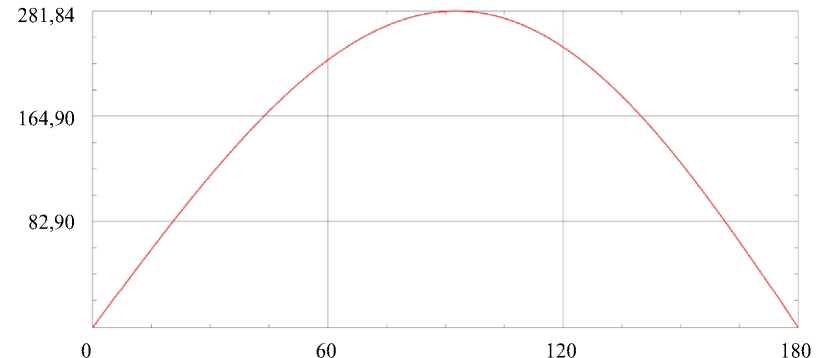
Ф, °
Рис. 6. График изменения крутящего момента в процессе проведения имитационного эксперимента
Значения исследуемых параметров, полученные при помощи симуляции (имитационного эксперимента), отличаются от значений полученных теоретически не более, чем на 3 %.
Обсуждение и заключения. В рамках представленной работы проведены кинематический и силовой анализы элементарного сегмента приводной цепи манипуляторного устройства. Полученные аналитические зависимости позволили определить максимальные значения линейного перемещения и развиваемого крутящего момента в приводном сегменте. Результаты имитационного эксперимента, реализованного в среде NX Nastran, и последующего сравнительного анализа показали хорошее соответствие полученных аналитических зависимостей по отношению к трехмерной динамической модели объекта. Это позволяет сделать вывод о том, что полученные аналитические зависимости могут быть использованы при разработке системы управления приводов вышерассмотренных манипуляторных устройств. Проведенные исследования показали, что цепь из сегментов рассматриваемого рычажного механизма обладает хорошими передаточными свойствами и при достаточной длине может заменить передачу на основе скручивания нити. Однако устройство исследуемой передачи более сложное. Несмотря на это, передача на основе скручивания цепи сегментов обладает таким преимуществом, как возможность обеспечения большего числа рабочих циклов манипуляторного устройства с сохранением требуемой точности позиционирования и повторяемости за счет меньших деформаций элементов цепи.
Список литературы Расчет силовых и кинематических параметров передаточного механизма на основе цепи скручивающихся рычагов
- Гапоненко, Е. В. Структурный анализ и классификация роботизированных систем с приводными механизмами на основе кабельных элементов / Е. В. Гапоненко, Л. А. Рыбак, Л. Р. Холошевская // Вестник БГТУ им. В. Г. Шухова. — 2019. — Вып. 9. — С. 126-136.
- Gaponov, I. Twisted String Actuation Systems: A Study of the Mathematical Model and a Comparison of Twisted Strings / I. Gaponov, D. Popov, Jee-Hwan Ryu // IEEE/ASME Transactions on Mechatronics. — 2014. — Vol. 19. — P. 1331-1342. https://doi.org/10.1109/TMECH.2013.2280964
- A wearable robotic device based on twisted string actuation for rehabilitation and assistive applications / M. Hosseini, R. Meattini, G. Palli, C. Melchiorri // Journal of Robotics. — 2017. — Vol. 2017. — Art. 3036468. http://dx.doi.org/10.1155/2017/3036468
- Sonoda, T. Multi-fingered robotic hand employing strings transmission named "Twist Drive" / T. Sonoda, I. Godler // In: Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems. — 2010. — P. 2733-2738. http://dx.doi.org/10.1109/IRQS.2010.5652886
- The Twisted String Actuation System: Modeling and Control / T. Wuertz, Ch. May, B. Holz [et al.] // IEEE/ASME Transactions on Mechatronics. — 2010. — Vol. 18. — P. 1215-1220. http://dx.doi.org/10.1109/AIM.2010.5695720
- Integrated mechatronic design for a new generation of robotic hands / G. Berselli, G. Borghesan, M. Brandi [et al.] // IFAC proceedings Volumes. — 2009. — Vol. 42. — P. 8-13. https://doi.org/10.3182/20090909-4-JP-2010.00004
- The DEXMART hand: Mechatronic design and experimental evaluation of synergy-based control for human-like grasping / G. Palli, C. Melchiorri, G. Vassura [et al.] // The International Journal of Robotics Research. — 2014. — Vol. 33. — P. 799-824. http://dx.doi.org/10.1177/0278364913519897
- The modular multisensory DLR-HIT-Hand: Hardware and software architecture / Honh Liu, Peter Meusel, Gerd Hirzinger [et al.] // IEEE/ASME Transactions on Mechatronics. — 2008. — Vol. 13. — P. 461-469. https://doi.org/10.1109/TMECH.2008.2000826
- Лапшин, В. В. О принципе виртуальных перемещений / В. В. Лапшин // Вестник МГТУ им. Н. Э. Баумана. — 2012. — № 2(45). — С. 59-64.
- Воробьева, Н. С. Разработка базы моделей манипулятора параллельно-последовательной структуры / Н. С. Воробьева, В. В. Дяшкин-Титов, А. В. Дяшкин // Известия ЮФУ. Технические науки. — 2017. — № 9(194). — С. 143-152.
- Михайленко, Н. И. Применение принципа возможных перемещений к решению технических задач / Н. И. Михайленко, Э. Я. Живаго // Вестник СибГИУ. — 2013. — № 1(3). — С. 58-63.
- Вдовин, Д. С Виртуальный стенд для определения нагрузок на рулевое управление автомобиля / Д. С. Вдовин, И. В. Чичекин, Т. Д. Поздняков // Инженерный журнал: наука и инновации. — 2017. — № 8(68). — С. 1-12.
- Cepon, G. Introduction of damping into the flexible multibody belt-drive model: A numerical and experimental investigation / G. Cepon, L. Manin, M. Boltezar // Journal of Sound and Vibration. — 2009. — Vol. 324. — P. 283-296. https://doi.org/10.1016/i.isv.2009.02.001
- Malaka, J. Generating numerical multibody model of toothed belt in technological machines with Siemens NX. / J. Malaka, M. Hetmanczyk // International Journal of Modern Manufacturing Technologies. Special Issue. — 2021. — Vol. XIII. — P. 87-95. http://dx.doi.org/10.54684/iimmt.2021.13.3.87
- Нужный, А. М. Параметризация твердотельных моделей с использованием NX OPEN / А. М. Нужный, М. В. Веркошанский, Н. И. Гребенникова, С. Л. Кенин // Вестник ВГТУ. — 2019. — Т. 15, № 3. — С. 24-27.
