Расчет собственных частот и форм колебаний трубопроводов с помощью программного комплекса

Автор: Прокофьев А.Б.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Надёжность, динамика и диагностика машин
Статья в выпуске: 2 т.1, 1999 года.
Бесплатный доступ
Разработан программный комплекс для расчета собственных форм и частот колебаний трубопроводных систем. Приведена математическая модель, положенн ая в основу разработанного программного комплекса. Выполнено экспериментальное определение собственных частот трубопровода на двух упругих опорах с консольным концом и их сравнение с результатами расчета.
Короткий адрес: https://sciup.org/148197551
IDR: 148197551
Calculations of pipelines' natural frequencies and vibration forms on the base of software application
Software tools for calculation of natural frequencies and vibrations forms of pipeline systems is developed. Mathematical models, which form the basis of the software, are presented. Experimental determination of pipeline natural frequencies for two elastic piers, which have cantilever end, is carried out. The obtained data are compared with calculation results.
Текст научной статьи Расчет собственных частот и форм колебаний трубопроводов с помощью программного комплекса
Институт акустики машин, г. Самара
Разработан программный комплекс для расчета собственных форм и частот колебаний трубопроводных систем. Приведена математическая модель, положенная в основу разработанного программного комплекса. Выполнено экспериментальное определение собственных частот трубопровода на двух упругих опорах с консольным концом и их сравнение с результатами расчета.
Одной из задач в решении проблемы снижения виброакустических нагрузок в гидромеханических системах энергетических установок различного назначения является задача определения собственных форм и частот колебаний трубопроводов. Ее решение позволяет определять возможность возникновения механических резонансных колебаний, места реализации максимальных значений вибропараметров, а также, в частности, является основой для расчета виброакусти-ческой активности трубопроводной системы под действием пульсирующего потока рабочей среды.
Во многих работах [1, 2, 3, 4] даются приближенные методы определения собственных частот и форм колебаний трубопроводов. Основным недостатком подобных методов, приводящим порой к значительным количественным погрешностям расчета, являются упрощения, принимаемые при учете краевых условий (геометрических и динамических условий, налагающих ограничения на свободу перемещения концов трубопровода, а также на изгибающий момент и поперечную силу). Основные варианты способов закрепления трубопроводов, рассматриваемые в этих работах, следующие:
-
1) свободный конец трубопровода;
-
2) жесткая заделка конца трубопровода;
-
3) конец трубопровода закреплен шарниром.
Во всех этих работах при расчете не учитывается жесткость (или податливость) опор крепления трубопровода. Это связано, по-ви-димому, с необходимостью проведения сложных и громоздких вычислений, реализация которых без применения вычислительной техники практически невозможна.
В данной работе предпринимается попытка расчета собственных форм и частот колебаний трубопровода с учетом жесткости его опор при помощи современной вычислительной техники (персональных компьютеров) и программных средств, специально разработанных для этой цели. Методика расчета базируется на методе Крылова. Определение собственных форм и частот колебаний трубопровода осуществляется интегрированием исходного дифференциального уравнения свободных поперечных колебаний прямого стержня [5]. Форма главного колебания (собственная форма), устанавливающая закон распределения максимальных (амплитудных) отклонений точек оси трубопровода от равновесного расположения, описывается общим интегралом:
y(x)=AS(kx)+BT(kx)+CU(kx)+DV(kx), (1) где y(x) - отклонения точек оси трубопровода от равновесного расположения;
A,B,C,D - произвольные постоянные, подобранные так, чтобы для функции y(x) выполнялись краевые условия, т.е. условия закрепления концов трубопровода;
S(kx),T(kx),U(kx),V(kx) - функции Крылова;
|
S ( kx ) = у ( chkx |
+ cos kx ) , |
|
T ( kx ) = у ( shkx |
+ sin kx ) , |
|
U ( kx ) = У ( chkx |
- cos kx ) , |
|
V ( kx ) = У ( shkx |
- sin kx ) , |
Таблица 1. Краевые условия
|
Краевое условие |
Обозначение |
Аналитическое выражение |
|
Конец трубопровода свободен |
у " = 0 у '" = 0 |
|
|
Жесткая заделка конца трубопровода |
^^^^^ |
у = 0 у ' = 0 |
|
Шарнирное закрепление конца трубопровода |
у = 0 у" = 0 |
|
|
Закрепление конца трубопровода в упругой опоре. |
^^^^^^^^^ |
у " = 0 Е1у ” = су |
( тт + m W>2
4 ò æñ k = Л , y (x ) = AS (kx) + BT (kx)+
EI ,
w c - собственная круговая частота; тт - погонная масса трубопровода; m - погонная масса рабочей жидкости, содержащейся в трубопроводе;
E - модуль упругости;
I - момент инерции поперечного сечения трубопровода.
Краевые условия выражаются соотношениями, представленными в таблице 1.
Одним из преимуществ использования функций Крылова и записи формы главного колебания в виде (1) является то, что можно сразу написать выражение общего интеграла, удовлетворяющего условиям на конце x = 0 и содержащего только две постоянные, которые определяются из условий на другом конце x = 1 (здесь 1 - длина трубопровода).
В случае наличия промежуточной опоры выражение (1) для записи формы главного колебания несколько модифицируется. Можно показать [5], что в этом случае собственная форма записывается в виде:
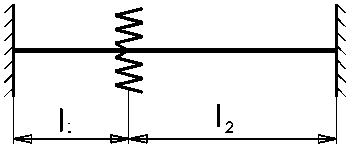
Рис. 1. Трубопровод с жесткой заделкой по концам и упругой промежуточной опорой
+ CU ( kx ) + DV ( kx ) при 0 < x < 1 1 y ( x ) = AS ( kx ) + BT ( kx ) +
+ CU ( kx ) + DV ( kx ) +
+
kRUV ( k ( x - ^
при 1 1 < x < 1 1 + 1 2
Значение величин 1 1 и 1 2 определяется из рассмотрения рис. 1.
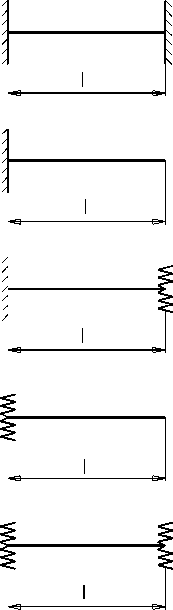
На рис.2 представлена классификация, охватывающая все возможные варианты крепления трубопровода на двух и трех опорах (в классификации не рассматривается случай шарнирного закрепления, так как случай идеального шарнира на практике не встречается, а лишь является упрощением опоры, обладающей высокой поперечной жесткостью и некоторой угловой жесткостью). Предлагаемая классификация положена в основу разработанного программного комплекса по расчету собственных частот и форм колебаний трубопровода. Алгоритм расчетной части программы продемонстрируем на двух примерах:
-
1) трубопровод на двух упруго закрепленных относительно поперечных перемещений концах;
-
2) трубопровод с жестко закрепленными концами и промежуточной упруго закрепленной опорой.
Краевые условия в этом случае:
S ( 0 ) = 1, 1 T ( 0 ) = 0, U ( 0 ) = 0, V ( о ) = 0- .
Отсюда C=0 .
Тогда общий интеграл (1), удовлетворяющий для рассматриваемого случая краевому условию у ' *(о ) = 0 , имеет вид:
y(x)=AS(kx)+BT(kx)+DV(kx) (3).
Из второго краевого условия при x=0 , получаем:
k3EI(AT(0)+BU(0)+DS(0))=c1(AS(0)+BT(0)+DV(0)), или с учетом (2)
k3EID = c1A, откуда
A =
k3EI D c1
Рис. 2. Классификация схем
Тогда общий интеграл (1), удовлетворяющий условиям на конце x = 0 , имеет вид:
У ( 0 ) = у" ( l ) = 0, EIy" ( 0 ) = C i y ( 0 ), Ely” ( l ) = c , y ( l )
Подставим краевое условие у'' ( о ) = 0 в выражение (1). При этом необходимо дважды продифференцировать функции Крылова. Выражения последовательных производных по x от функций S(kx),T(kx),U(kx),V(kx) до третьего порядка включительно приведены в таблице 2. Получим:
AU(0)+BV(0)+CS(0)+DT(0) = 0
Значения функций Крылова при x=0 имеют значения:
j( x ) = BT ( kx ) + D
k EIS ( kx ) + V ( kx ) c1
Условия при x=l выражаются уравнениями:
( 33FJ x)
BV ( kl ) + D k---U ( kl ) + T ( kl ) = 0,
V c l 0
B ( k 3 EIU ( kl ) - c 2 T ( kl ) ) +
+ D
kE (k3 EIT ( kl ) - c 2 S ( kl ) ) + c 1
= 0.
+ k 3 EIS ( kl ) - c 2 V ( kl )
Исключив B и D, придем к уравнению частот, которое представим следующим об-
Таблица 2. Производные
|
Первая производная |
Вторая производная |
Третья производная |
|
|
S(kx) |
kV(kx) |
k2U(kx) |
k3T(kx) |
|
T(kx) |
kS(kx) |
k2V(kx) |
k3U(kx) |
|
U(kx) |
kT(kx) |
k2S(kx) |
k3V(kx) |
|
V(kx) |
kU(kx) |
k2T(kx) |
k3S(kx) |
Таблица 3. Уравнения частот и форм главных колебаний
k3 EI
Д ( kl ) = V ( kl ) c 1
+ k 3 EIS ( kl ) - c 2 V ( kl )
- (k3 EIU ( kl ) - cj ( kl ) ) •( k - EI- U ( kl ) + T ( kl ) ) = 0.
I c
Вычисление корней уравнения частот ведется численными методами. Для определения ориентировочных данных о расположении собственных частот системы можно пользоваться известными теоремами Рэлея [6].
а.) Если функция Рэлея растет вследствие прибавления к максимальной потенциальной энергии r квадратов вида
Xk (l i ) = ( q Ki l i + ... + qA У (k=1,2,…,r)
без изменения кинетической энергии, то частоты данной системы ww h и частоты измененной w h связаны неравенствами:
W < o h (h = x,2,...n), W h < W + r (h = 1,2,...n - r)
б.) Если функция Рэлея убывает вследствие прибавления к максимальной кинети-
( k 3 EIT ( kl ) - c 2 S ( kl ) ) +
ческой энергии r квадратов вида
Xk (li ) = (qKili + ... + qnln У (k=1,2,…,r), то частоты wwh исходной системы и частоты wh измененной удовлетворяют неравенствам:
W h < w h (h 1 , 2y' n), w h- r < w h (h = r + 1 ,—n )-
Таким образом, из уравнения частот определяются значения k. (i=1,2,3,...) , которые связаны со значениями собственных частот
выражениями
w i = k2 2
EI
mm + тж òæ
Из первого уравнения системы (4) нетрудно определить, что
1 Г k3EI V ( kl ) I c1
U ( kl ) + T ( kl ) I D .
Подставляя A и B, выраженные через D, в общий интеграл (3), получим следующую форму главного колебания (здесь и в дальнейшем постоянные множители опущены): yx ) = k 3 EI S ( kx ) - V^ kEI^O ) + ТШ ) ' + V ( kx )
Из изложенной выше методики наибо-
лее трудоемкая часть расчетов состоит в определении корней уравнения частот. Практически реализация этой части без применения вычислительной техники не представляется возможной. В таблице 3 приведены уравнения частот и форм главных колебаний для рассмотренных в классификации случаев закрепления трубопровода в двух опорах.
-
2) Краевые условия в этом случае (см. рис.1)
y(0) = y'(0) = y(l i + Ц) = У (Ц + Ц) = 0 Ely* (l i ) = cy (l i )
Подставим краевое условие y(0) = 0 в выражение (1). Получим
AS(0) + BT(0) + CU(0) + DV(0) = 0
Откуда с учетом (2) А=0 . Тогда общий интеграл (1), удовлетворяющий для рассматриваемого случая краевому условию y(0)=0, имеет вид:
y(x ) = BT(kx ) + CU(kx ) + DV(kx )
при 0 < x < li
y(x)=BT(kx)+CU(kx)+DVkx) + R V(k(x-1)) k3EI при 11 < x < 11 +l2
Из второго краевого условия при x=0 , получаем:
y" (0 ) = k2 [ BV(0 ) + CS(0 ) + DT(0 ) ] = 0
или с учетом (2) C=0 . Тогда общий интеграл (1), удовлетворяющий условиям на конце x=0 , имеет вид:
y(x ) = BT(kx ) + DV(kx )
при 0 < x < 1 1
y(x) = BT(kx) + DV(kx) + -3— V(k(x - li)) k EI при 11 < x < 11 +12
С учетом краевых условий при x = 1 1 + l2 получаем следующую систему уравнений:
CU(k(l , + l 2 )) + DV(k(l , + l 2 )) + R^- V(kl2) = 0 k3EI
CT(k(l 1 + 1 2 )) + DU(k(l 1 + 1 2 )) + -R- U(kl 2 ) = 0
k EI
К этим уравнениям, содержащим три неизвестных C, D, R, нужно добавить еще одно уравнение, именно, уравнение, получающееся из краевого условия на промежуточной опоре:
k3EI(CV(kl 1 ) + DS(kl1 )) = c(CU(kl 1 ) + DV(kl 1 )
Из (6) и (7) после небольших преобразований получим уравнение частот системы:
U(k(l , +U )
D = T(k(l , + 1 2 ))
k3EIV(kl1) - cU (kli)
V(k(l i + 1 2 ))
U(k(l i + 12» kiEIS(kl1) - cV (kl1)
V(kl 2 )
U(kU = 0
или
D =
a1
a2
a3
b1 d1
b 2 d 2
b 3 d 3
= 0
где a1 = U(k(l1 +12))
a 2 = T(k(l i + 1 2»
a3 = k3EIV(kl1) - cU (kl1)
b i = V(k(l i + 1 2 ))
b 2 = U(k(l i + 1 2 ))
b3 = k3EIS(kli) - cV (kli)
-
di = V(kl2)
d2 = U(kl2)
d3 = 0
Раскрывая определитель, найдем:
D = di(a2b3 - a3b2) - d2(aib3 - a3bi) = 0
Определив корни уравнения частот k. , по уравнению (5) нетрудно определить значения собственных частот системы. Из уравнений (6) и (7) выразим переменные C и R через D . Получим:
C = cV(kl i ) - k3EIS(kl i ) D k3EIV(kl 1 ) - cU(kl 1 )
R k 3 Eii
V^ki l )
eV ( kl 1 ) - k 3 EIS ( kl 1 ) k 3 EIV ( kl 1 ) - cU ( kl 1 )
D
_ x U ( k ( l i + 1 2)) + V ( k ( l i + 1 2))
Теперь мы можем записать уравнение форм главных колебаний:
Таблица 4. Уравнения частот и форм главных колебаний
|
1 |
D = d , (ab - ab ) - d 2 (ab; - ab , ) a , = U ( k ( l 1 + l 2 )) , a 2 = T ( k ( l, + l 2 )) , a 3 = kEiVkl , ) - cdkl , ) , b , = V ( k ( l , + l 2 )) , b 2 = U ( k ( l , + 1 2 )) , b 3 = k3ElSkl 1 ) - cV ( kl , ) , d , = V ( kl 2 ) , d 2 = U ( kl 2 ) j( x ) = - — U( kx ) + V ( kx ) npu0 < x < l , a 3 ,y ( x ) = - — U ( kx ) + V ( kx ) - — I- —a, + b, | v ( k ( x - 1, )) npul, < x < l, + 12 a; ' ' ' ' d, V <4 ‘) ‘ |
|
|
2 |
D = d i ( a2 b 3 - a3b2 ) - d2 ( aib3 - a3b1 ) a , = S ( k ( l , + l 2 )) , a 2 = V ( k ( l , + l 2 )) , a 3 = k3EIV ( kl i ) - сф , ) , b , = T ( k ( l , + l 2 )) , b2 = S ( k ( l , + 12 )) , b 3 = k ElSkl , ) - cVkl , ) , d i = T ( kl2 ) , d 2 = Ф2 ) j( x ) = -—U ( kx ) + V ( kx ) npu0 < x < l , a 3 _y( x ) = - — u ( kx ) + V ( kx ) — —I - —a 2 + a , | v ( k ( x - l , )) npul , < x < l , + 12 a 3 d2 V a 3 J |
|
|
3 |
D = d i ( a2 b 3 - a3b2 ) + d3 ( aib2 - a2 b i ) a , = S ( k ( l , + 12 )) , a 2 = k3ElV ( kl i ) - ciu ( kli ) , a 3 = k3EIv ( k ( li + 1 2 )) - c 2 u ( k ( l i + 1 2 )) , b i = U ( k ( l , + 12 )) , b 2 = kEiSSk ) - c , V ( kl , ) , b 3 = k3EIs ( k ( li + 1 2 )) - c 2 V ( k ( l , + 1 2 )) , d i = T ( kl 2 ) , d 3 = k3ElSkl 2 ) - c 2 V ( kl 2 ) j( x ) = -—u ( kx ) + V ( kx ) npu0 < x < l , a 2 _y ( x ) = - — U( kx ) + V ( kx ) ——I - —a, + b, | v ( k ( x - 1, )) npul, < x < l, + 12 a2 ' ' ' ' d, V a2 ‘ -j |
|
|
4 |
D = d , ( a 2 b 3 a , = V(k(l, + 1 2 )) , a 2 = U ( b , = k-EIU ( k ( l , + 1 2 )) + T ( k ( l , c 1 b 3 =[ k-EIT ( kl i ) + S ( kl , ) | k3EI - C 2 V c i 0 j( x ) = 3T ( kx ) + a3 c y ( x ) = - b 3- T ( kx ) + k^I s ( kx ) + V ( k a3 c1 |
- a 3 b 2 ) - d 2 ( a , b 3 - a 3 b , ) k ( l , + 1 2 )) , a 3 = kEid ^ kl , ) - c2T ( kl , ) , + l 2 )) , b 2 = k-EIT ( k ( l i + l 2 )) + S ( k ( l , + l 2 )) c 1 —s (kd, ) + V ( kl , ) | , d i = T ( kl2 ) , d 2 = S ( kl 2 ) V c i J S ( kx ) + V ( kx ) npu0 < x < l , 1 x ) -—I b, - a^d | v ( k ( x - 1, )) npu l, < x < l, + 12 d, V a3 ) ' " |
|
5 |
D = d i ( a 2 b 3
b 3 = kE^T ( k ( l i + l 2 )) + i -
d 3 = k3 j( x ) = 2T ( kx ) + a 2
|
- a3 b 2 ) + d3 ( aib2 - a2 b i ) ) - c 2 T ( kl , ) , a 3 = k3ElUvk ( l , + 12 )) - c 2 T ^k l , ) , 6 22 b2 =---- -T ( kl , ) + i - c 2 k EiSkl ) - C 2 V ( kl , ) c i V c i 0 k3EIS ( k ( li + 1 2 )) - c3 V ( k ( l , + 1 2 )) , d , = T ( kl 2 ) , EiSkl 2 ) - c 3 V(kl ) ) , S(kx ) + v(kx ) npu 0 < x < l , x ) -— I b, - ai— | v ( k ( x - 1, )) npul, < x < l, + 12 d , V a2 J |
Коды АЦП
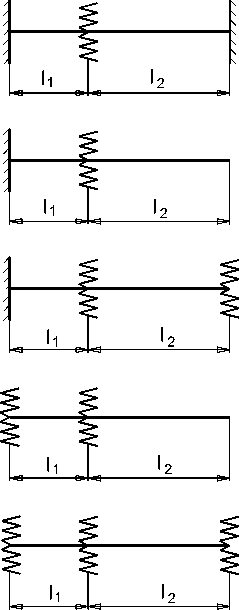
Рис. 3. Примеры экранных страниц программного комплекса
400.00
0.00
-400.00
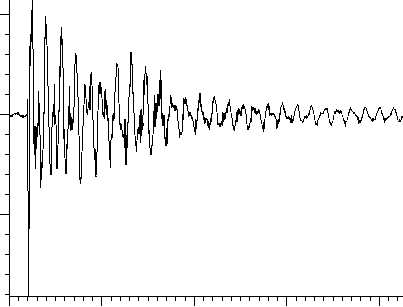
0.88 0.92 0.96 1.00 1.04 t, С
Рис. 5. Осциллограмма собственных колебаний трубопровода
У =
cV(kl , ) - k3EIS(kl , ) k3EIV(kl , ) - cU(kl , )
U(kx) + V(kx)
при 0 < x < l ,
У =
«V™ - kEISk l , ) u(kx) +^ - V(k(x - W k EIV(kl , ) - cU(kl , ) V(kl 2 )
cV(kl , ) - k3EIS(klI) k3EIV(kl , ) - cU(kl , )
U(k(l , + l2>) + V(k(l , + l2>)
при l , < x < l , + l2
В таблице 4 приведены уравнения частот и форм главных колебаний для всех, рассмотренных в классификации, случаев трубопроводов на трех опорах.
Описанные выше алгоритмы реализованы в программном комплексе, ориентированном на персональные компьютеры типа IBM PC и операционную систему Windows 95 или Windows 98. Программный код выполнен на языке C++ с применением интегрированной среды Borland C++Builder.
На рис. 3 представлены окно ввода исходных данных и окно вывода результатов расчета. Имеется возможность вывода результатов расчета в файл данных.
Для проверки достоверности принятых расчетных моделей и работоспособности
1 1 =580 мм
1 2 =208мм
Рис. 4. Схема исследуемого трубопровода программного комплекса наряду с машинным экспериментом был проведен эксперимент на реальном трубопроводе, схема которого представлена на рис. 4.
Экспериментальное исследование собственных частот трубопроводной системы осуществлялось методом простукивания /3/. Основными достоинствами этого известного метода применительно к трубопроводам является высокая производительность, оперативность и несложность применяемой аппаратуры. Он позволяет производить измерения непосредственно на собранной системе, с учетом всех особенностей монтажа, в том числе и с учетом реальных жёсткостей опор трубопровода. На рис. 5. представлена осциллограмма виброускорения, на которой явно видны затухающие колебания. В качестве датчика вибрации применялся преобразователь пьезоэлектрический виброизмери-тельный ДН-4М1 (масса этого датчика 13 г). Сигнал с датчика подавался в измеритель шума и вибраций типа ВШВ-003-М2. Аналоговый сигнал с измерителя шума и вибраций далее поступал в аналого-цифровой преобразователь L-264 фирмы L-card, г. Москва (точность АЦП- 12 бит). Цифровой сигнал с выхода АЦП с помощью программы Gemis Oscilloscope записывался на жесткий диск компьютера. Далее проводился спектральный анализ записанного сигнала.
В таблице 5 приведены экспериментальные и расчетные собственные частоты рассматриваемой трубопроводной системы. Же-
Таблица 5. Экспериментальные и расчётные собственные частоты
Из таблицы видна хорошая сходимость экспериментальных и расчетных значений, по крайней мере, для трех первых собственных частот. Как и следовало ожидать, погрешность определения собственной частоты расчет с увеличением номера этой частоты.
Приведенные данные позволяют судить об адекватности математической модели и возможности использования разработанного программного комплекса для решения задач определения собственных форм и частот колебаний трубопроводных систем.
