Расчет статического деформирования осесимметричных оболочек вращения по дифференциальной модели

Автор: Нгуен К.М., Шелевая Д.Р., Красноруцкий Д.А.
Статья в выпуске: 1, 2024 года.
Бесплатный доступ
Получены дифференциальные уравнения статического геометрически нелинейного деформирования осесимметричной оболочки вращения. Разрешающие функции являются проекциями векторов в глобальной системе координат. Уравнения позволяют описывать произвольную геометрию меридиана (изломы, скачки кривизн), большие деформации, изменение толщины оболочки при деформировании, а также поперечные сдвиги, характерные для толстых оболочек. Для численного решения применен подход на основе метода конечных разностей, который реализован в собственном программном комплексе по расчету механики пространственных стержневых систем - DARSYS. Приведены расчеты тестовых задач раздутия внутренним давлением оболочек цилиндрической, сферической, эллиптической, конической форм, а также составной коническо-цилиндрической оболочки с изломом меридиана. Представлены графики сходимости перемещений в контрольных точках в зависимости от плотности сетки и при изменении нагрузки, построены деформированные конфигурации меридиана. Для эталона для сравнения использовались решения, полученные в ANSYS разными конечными элементами типа Shell. В тексте статьи приведены скрипты APDL, позволяющие проводить параметрические расчеты тестовых задач. Предлагаемый подход к расчету статического деформирования оболочек вращения показал хорошее согласование с конечно-элементным моделированием в ANSYS (в том числе для толстых оболочек) и в будущем будет расширен до моделирования динамического деформирования и возможности решения сопряженных задач взаимодействия с жидкостью или газом. Приведенные уравнения осесимметричной оболочки являются частным случаем общих уравнений, разработка и применение которых вынесено за рамки данной статьи, а полученные результаты решения являются первым этапом тестирования развиваемого комплексного подхода к расчету статического и динамического деформирования оболочек, альтернативного конечно-элементному моделированию.
Метод конечных разностей, дифференциальная модель, геометрическая нелинейность, большие продольные деформации, учет сдвига, произвольная форма меридиана, раздутие оболочек, ansys, apdl, конечный элемент shell
Короткий адрес: https://sciup.org/146282826
IDR: 146282826 | УДК: 539.3 | DOI: 10.15593/perm.mech/2024.1.07
Calculation of static deformation of axisymmetric shells of rotation with differential model
In the paper differential equations of static geometrically nonlinear deformation of axisymmetric shell of rotation are obtained. The resolving functions are projections of vectors in the global coordinate system. The equations allow describing any geometry of meridian (breaks, curvature jumps), large deformations, changing of shell thicknesses during deformation, also cross shears characteristic for thick shells. For the numerical solution, the approach based on the finite difference method is applied, which is realized in the own software package for the calculation of the mechanics of spatial rod systems - DARSYS. The calculations of test problems of the internal pressure inflation of cylindrical, spherical, elliptical, conical shells, as well as a combined conical-cylindrical shell with a meridian break are presented. Graphs of convergence of displacements at the reference points as a function of mesh density and under load variation are given, and deformed meridian configurations are plotted. The solutions obtained in ANSYS by different finite elements of Shell type were used as a reference for comparison. APDL scripts for parametric calculations of the test problems are given in the text of the paper. The proposed approach to the calculation of static deformation of shells of rotation has shown good agreement with finite element modeling in ANSYS (including thick shells) and in the future will be extended to the modeling of dynamic deformation and the possibility of solving coupled problems of interaction with liquid or gas. The given equations of the axisymmetric shell are a special case of the general equations, the development and application of which are beyond the scope of this paper, and the obtained solution results are the first stage of testing the developed complex approach to the calculation of static and dynamic deformation of shells, alternative to finite-element modeling.
Текст научной статьи Расчет статического деформирования осесимметричных оболочек вращения по дифференциальной модели
ВЕСТНИК ПНИПУ. МЕХАНИКА № 1, 2024PNRPU MECHANICS BULLETIN
Развитие строительных, авиационных, космических, судостроительных отраслей неразрывно связано с использованием тонкостенных конструкций. Наука об оболочках относительно молода: она появилась в XIX в. и стала бурно развиваться в XX–XXI столетиях по пути построения практических методов расчета. Традиционно учёными строились аналитические и приближенные решения для частных случаев геометрических форм, вариантов граничных условий, видов нагрузки, различных моделей материалов. Обзор подходов, методов решения и моделей теории пластин и оболочек приведен в работе [1]. Существенный вклад в исследование деформирования пластин и оболочек был сделан учеными благодаря развитию метода конечных элементов (МКЭ), который является универсальным и постоянно совершенствующимся инструментом в сочетании с современными возможностями вычислительной техники. В большой части инженерной и научной среды сложилось убеждение, что современные CAE-пакеты прикладных программ на основе МКЭ, такие как ANSYS, Femap, Abaqus, MSC.Marc и много других, удовлетворили все потребности как инструменты в исследовании напряженно-деформированного состояния сплошных сред. С этим сложно не согласиться, универсальность и относительная простота программной реализации МКЭ сделала его, пожалуй, самым популярным численным подходом к решению задач механики, в том числе для расчета деформированного состояния оболочек. Тем не менее отдельными учёными предпринимаются шаги по созданию и развитию альтернативных МКЭ-подходов, нацеленных как на решение отдельных задач, так и на создание универсальных подходов.
Интересным и перспективным направлением в развитии альтернативных подходов к расчету оболочечных конструкций представляется применение бессеточных методов перидинамики [2; 3]. В работе [4] применяется метод граничных элементов для расчета оболочечных конструкций, результаты сравниваются с расчетом методом конечных разностей (МКР). В монографии [5] изложен вариационно-разностный подход к расчету конструкций, приведен глубокий обзор работ по уточненным теориям оболочек. В статье [6] изложен метод неявных конечных разностей (МНКР), который позволяет, исходя из формулировки краевой задачи в перемещениях и напряжениях как независимых между собой основных величинах разрешающей системы уравнений, определять напряжения с более высокой точностью, чем МКЭ в форме метода перемещений. В работе [8] для решения задачи устойчивости цилиндрической оболочки под действием неравномерной нагрузки используется метод на основе сплайн-интерполяции. В статье [7] обсуждается и анализируется применение вариационно- разностного метода к расчету линейных и нелинейных задач деформирования тонких и толстых оболочек из композитных и изотропных материалов. В работах [9– 12] используется метод дифференциальных квадратур для аппроксимации производных некоторых дифференциальных уравнений механики и краевых условий, что позволяет свести их решение краевой задачи к решению системы линейных алгебраических уравнений относительно узловых значений разрешающих функций. В [13] приведен численный анализ устойчивости явной разностной схемы высокого порядка для расчета симметричных оболочек вращения под действием импульсных нагрузок. В работах [14; 15] рассматривается деформирование мягкой оболочки из высокоэластичного материала, для расчета применяется метод дифференцирования по параметру, позволяющий свести решение нелинейной краевой задачи к совокупности квазилинейной краевой и нелинейной начальной задач и применить метод начальных параметров решения линейных краевых задач. В работе [16] используется по сути метод пристрелки для решения двухточечной краевой задачи для мембраны как осесимметричной оболочки вращения, проводится анализ устойчивости и построение форм равновесия до и после точек бифуркаций. В статье [17] применяется МКР для расчета оболочки в форме эллиптического параболоида с шарнирно-неподвижным опиранием. В работе [18] МКР применяется для расчета напряженно-деформированного состояния композитной оболочки вращения. В статье [19] рассматривается численное решение МКР уравнений классической теории оболочек для описания напряженно-деформированного состояния сильфона U-образного компенсатора при нагрузке внутренним давлением. В [20] МКР используется для расчета прямоугольной плиты на упругом основании, произведена верификация с результатами расчетов, выполненных с помощью двойных тригонометрических рядов. В статье [21] с помощью МКР проводится анализ устойчивости пластин и оболочек в условиях ползучести для элементов конструкций из материалов, обладающих свойством старения, находящихся под действием длительных нагрузок. В работах [22–25] рассматриваются подходы к расчету взаимодействия оболочечных конструкций с жидкостью.
Настоящее исследование является логическим продолжением и развитием статьи [26] с обобщением уравнений на геометрическую нелинейность, произвольную параметризацию меридиана, учет изменения толщины и поперечного сдвига при деформировании. Для получения численного решения применен алгоритм [27; 28] на основе метода конечных разностей, обладающий лучшей сходимостью, по сравнению с методом пристрелки, используемым в работе [26], а также имеющий возможность получать непосредственную оценку достигнутой точности численного решения.
1. Общие уравнения оболочек в глобальных координатах
Для стройности повествования приведем полные выкладки «от общего к частному» для получения разрешающей системы дифференциальных уравнений.
В трёхмерном пространстве рассмотрим криволинейную поверхность оболочки, которая разделяется координатными линиями (рис. 1, а ), на поверхности возьмем бесконечно малый элемент, образуемый линиями s 1 , 5 2 , 5 1 + dsi, s2 + ds 2 , в точке O этого элемента поставим локальную систему координат с тремя единичными векторами ei, e2, e3 (рис. 1, b ).
Уравнение поверхности задаётся радиус-вектором:
r ( s 1 , s 2 ) = xi ( sp s 2 ) ii + x 2 ( s i, s 2 ) i 2 +
+ x 3 ( s i , s 2
— —
) i 3 = x k ( s i , s 2 ) i k ,
где ik – базисные векторы глобальной системы координат; s1 , s2 – криволинейные координаты рассматривае- мой поверхности, по повторяющимся индексам ведется суммирование от 1 до 3.
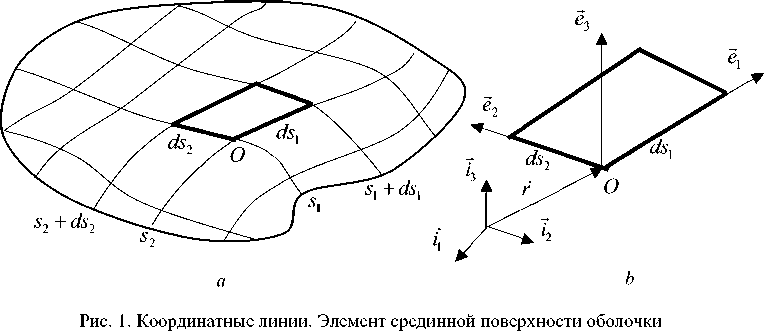
Fig. 1. Coordinate lines. Element of the midsurface of the shell
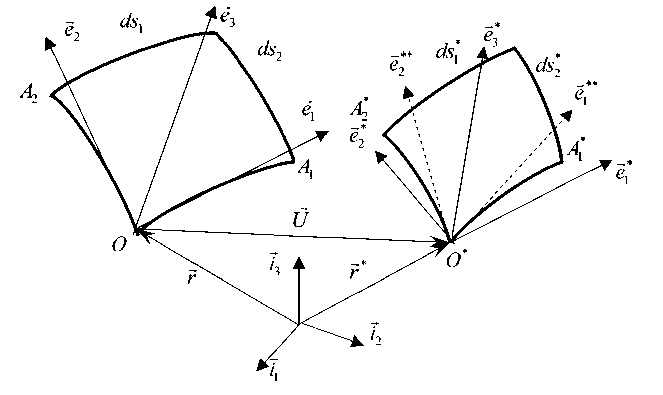
Рис. 2. Перемещение и деформирование малого элемента оболочки
Fig. 2. Displacement and deformation of a small shell element
Векторы локальной системы координат выражаются следующим образом:
— d — — d r — — — el — — , e2 — — , e — ei X e2 . (2)
a 5 1 a s 2
С практической стороны удобно задавать начальную ориентацию с помощью матрицы поворота (матрицы начальной геометрии):
—* e 1
— e 2
— e2
P 21
P 31
P 22
Р з2
P 23
Р зз
— i1
— i2
— i3
^ ei — P kik .
Деформация малого элемента (рис. 2) состоит из:
– перемещения параллельно самому себе как жесткого целого и поворота относительно точки O * ,
– изменения длин его сторон,
– изменения угла между сторонами.
Поворот малого элемента определим следующим образом:
ds * - ds, ds * - ds,
61 — —1----1, 62 — —2----2 - относительные удлине- ds1 ds2
ния сторон малого элемента вдоль направлений s 1 и s 2 соответственно.
При деформировании векторы локального базиса — 1 , e 2 переходят в e * , e 2 * . С учетом (3) и (4) повернутые орты будут иметь следующие выражения: — —
—, —P^—P k X k k i k . (6)
— * — *
При наличии сдвига ортогональность e 1 и e 2 нарушается, и они переходят в — 1** , e 2 ** . Обозначим угол сдвига %, тогда:
— ** — * — * — ** — * — *
e 1 — e 1 cos х + e 2 sin x , e 2 — e 1 sin x + e 2 cos x ,
или
—** —* (cos X ek — akjej , где a — I •
( sin x
sin X cos X

X 11
X 21
X 31
X 12
X 22
X 32

^ ~ i;—x kA ,
Из (2) и (3) можно получить:
—— —— dr — e1 ds1 — P1 kikds1, dr — e2ds2 — P2kikds2, (8)
. , 1 - cos to sin to 1 - cos to
Xii — 1--— (toj+tok),X ij— ®k +2— to x j * to to2
. sin to 1 - cos to,
Xi —-- tok. +--5— to to. , i — 1,2,3; j — 2,3,1; k — 3,1,2;
ik ki toto
тогда с учетом (6) и (7)
dr" — — * ds * — ( 1 + 6 1 ) « 1 j p jk X kk i k ds 1 , dr* — — 2** ds * — ( 1 + 6 2 ) « 2 j P jk X kk i k ds 2 , j — 1,2.
где to k - проекции вектора конечного поворота (вектора Эйлера) на оси глобальной системы координат.
В результате перемещения параллельно самому себе как жесткого целого точка O займет новое положение O*, длины отрезков ds1 — OAj , ds2 — OA2| изменятся и ста- нут равными O A1 — ds1 , O A2 — ds2. Обозначим
—
Поскольку U — r * - r , то
—
I UU — [ ( 1 +61 ) « 1 j p jk x kk - P 1 k ] — k , —
| U — [ ( 1 + 6 2 ) « 2 j P jk X kk -P 2 k ] — k . (10)
d s 2
Уравнения (10) описывают кинематику деформирования срединной поверхности оболочки. Они связывают поворот элемента оболочки, растяжение его сторон и изменение угла между ними с перемещениями элемента.
Несмотря на то, что в основе рассматриваемой математической модели лежит гипотеза Кирхгофа - Лява, подразумевающая малую толщину оболочки и сохранение ортогональности нормалей к срединной поверхности при деформировании, кинематические соотношения (10) можно легко модифицировать для приближенного учёта сдвиговых деформаций, которые вносят ощутимый вклад в изменение кривизны при деформировании толстых оболочек и пластин. Для этого будем рассматривать конечное состояние как суперпозицию деформированных состояний: 1) от изгиба, растяжения, сдвига в плоскости (по гипотезе Кирхгофа - Лява), и 2) сдвига поперек срединной поверхности, что соответствует теории Тимошенко. Таким образом, перемещение за счет сдвиговой деформации вдоль нормали к деформированной поверхности можно записать следующим образом:
— d—5=5 ds;=-ql -з* ds;=-з* ds;= кGh кGh
—- —*
T ,^ k X knin
к Gh * , k X k, к Gh *
*
М3 p ^pn nn 1
*
M3 p ^pnn 1
T - - * - *
, XуРзkРзpXpnindsi = 51 J.dS , где G - модуль сдвига, h* - толщина деформированной оболочки, к - корректирующий коэффициент сдвига прямоугольного сечения, T = T/',-, T2 = T2,1, - векторы внутренних погонных сил на площадках, ортогональных координатным линиям. Аналогично в другом направлении перемещение за счет сдвига будет иметь следующее выражение:
V - * 7 2, - * - *
dr2 = 5 2 d 2 = . X kj Р з k Р з p X pAd 2 = 5 2 n i n ds 2 . (12)
кGh коэффициент сдвига п2 /12 < к < 1. Сравнение теоретических значений корректирующих коэффициентов сдвига с экспериментальными приведены в работе [з5].
В итоге кинематические соотношения (10) с учетом поперечного сдвига (11) и (12) запишутся так:
—*
U = [ ( 1 + 6 - ( «„P jk X kn + 5 1 n ) -р , n ] - n ,
^ = [ ( 1 + 6 2 ) ( a 2 j P jk X kn + 5 2 n ) -P 2 n ] - n . (1 з)
Вычислим кривизны оболочки в направлении нормали к ней в двух сечениях для недеформированного и деформированного состояний:
k =--- e, , k =---- e , k =--- e2 , k, =---- e2 . (14)
1 1" 1 * 1,2 2*2 "x * 2 V / дSj дSj дs 2 дs 2
Рассмотрим равновесие элемента оболочки под действием внешней распределенной нагрузки и моментов. По граням элемента прикладываются внутренние погонные усилия и моменты, полученные в результате осреднений напряжений по толщине оболочки (рис. з). Направление погонной силы относительно нормали к грани, в которой она действует, может быть в общем случае произвольным (возможны нормальные, поперечные и касательные усилия).
Дифференциалы параметров поверхности представим в виде ds 1 = A 1 d а 1 , ds 2 = A 2 d а 2 . В этом представлении можно считать а 1 , а 2 безразмерными параметрами на поверхности.
Для деформированной оболочки имеем ds * = A * d а 1 , ds 2 = A * d а 2. Уравнение равновесия сил, записанные для деформированного состояния, имеют вид:
1 d( A2* T) 1 д( A* T2) -. . \---- + . . \----- + q = 0
A 1 A 2 да 1 A 1 A 2 да 2
Корректирующий коэффициент сдвига [29-з1] учитывает неравномерность распределения касательных напряжений по толщине оболочки. В середине прошлого столетия для этого коэффициента Миндлин [з2] предложил значение к = п 2 /12 , что мало отличается от значения, полученного Рейсснером: к = 5/6 [зз]. Каупер вы-
1 д ( A 2* M 1 ) 1 д ( A 1* M 2 )
A * A 2 * да , A 1* A 2 * да 2
+
1 д г
A 1* да .
—•
1 д-* -
+ -1 -д— X T2 + Т- = 0,
A 2 да 2
числил коэффициент коррекции как к =
—---- [з4].
Жилиным было получено значение к = —-— [зз], и сде-6-V лано предположение, что реальный корректирующий
где T = Tyi / , T 2 = T 2 ji y - векторы внутренних погонных —* —* —* —*
сил; M 1 = M 1 , i . , M 2 = M2jiy - векторы внутренних моментов; q = q , ! , - вектор внешней распределенной нагрузки; m = -,./,. - вектор внешнего распределенного
момента.
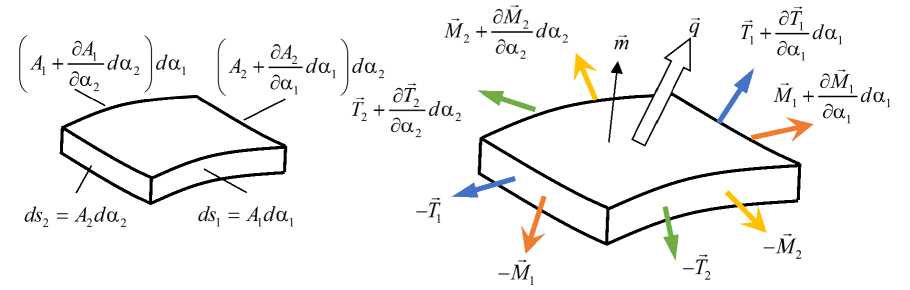
Рис. 3. Равновесие элемента оболочки
Fig. 3. Equilibrium of the shell element
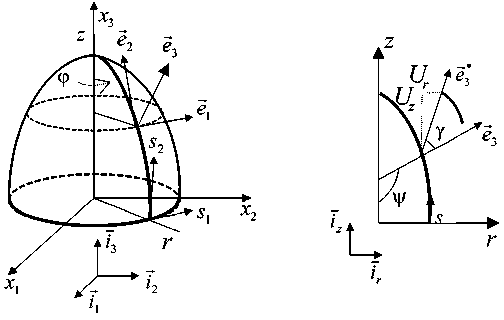
Рис. 4. Геометрия и деформация оболочки вращения
Fig. 4. Geometry and deformation of the shell of rotation
Для замыкания системы уравнений необходимо добавить связь между параметрами деформации и напряжениями и граничные условия. Запишем физические соотношения, полученные В.В. Новожиловым [36] для изотропного материала:
растяжение: е,=—( N -V N ) , е2=—— ( N -v N ) , (17) 1 Eh 122 Eh 21
сдвиг:
X =
2 (1 + v)
Eh
5 =
2 (1 + v)
Eh

H
R 2
2 (1 + v)
Eh
N 21
H
^^^^^^e
R 1
12 12
изгиб: K 1 = Eh^ ( M 1 -V M 2 ) , K 2 = Eh^ ( M 2 -v M 1 ) , (19)
Юнга, v - коэффициент Пуассона, e 1 , e 2 - параметры продольной деформации, % - параметр деформации сдвига, К 1 , к 2 - параметры изменения кривизны срединной поверхности, т - параметр деформации кручения.
Необходимо отметить, что закон зависимости деформаций от напряжений (17)–(20) может быть заменен на любой другой при необходимости, это не приведет к принципиальному изменению предлагаемого подхода к расчету деформирования оболочек. Кроме того, в уравнения могут быть добавлены силы инерции и рассмотрена задача динамического деформирования, но это выходит за рамки данной статьи и будет опубликовано отдельно.
2. Вывод определяющих уравнений для осесимметричной оболочки
кручение:
12HiVl „ T ,
Eh 3
где N 1 = T 1 e * , N 2 = T 2 e 2 * - продольные силы, 5 = T 1 e 2* = T 2 e * - сдвиговое усилие, M 1 = M 1 e * ,
При осесимметричном деформировании оболочки вращения (рис. 4) координатная сетка на оболочке остается ортогональной, то есть параметр сдвига X = 0 . Введем в рассмотрение цилиндрическую систему координат с ортами
M 2 = M 2 * — изгибающие моменты, H = M 1 e * = M 2 — * -крутящий момент, h – толщина оболочки, E – модуль
i r = cos ф i 1 + sin ф i 2, i ^ =
- sin ф i 1 + cos ф i 2, i z = i 3. (21)
Радиус-вектор срединной поверхности будет иметь следующий вид:
* *
r ( s, ф) = r ( s ) —r + z ( s ) —z , (22)
где r ( s ), z ( s ) – параметрические уравнения меридиана оболочки.
В качестве параметров поверхности возьмем s 1 = r ф , s 2 = s . Выпишем векторы локального базиса:
— = - sin ф —1 + cos ф —2 = —ф, e2 = Г s cos ф - + r s sin ф —2 + z, si3 = r sl+ z, sL (23) e3 = z,s cosф —1 + z,s sinф —2 - rs —3 = z,sir - rs —z, где символ в нижнем индексе после запятой означает дифференцирование по этой переменной.
Таким образом, матрица (3) для осесимметричной оболочки будет иметь вид:
P =
- sin ф rs cos ф
z s cos ф
cos ф 0 r sin ф z, , s , s z , sin ф - r
, s , s
Выпишем кривизны недеформированной срединной поверхности:
, д e^- ki = T" e = дs
1 1 z (25)
—(-zs sinф —1 + zs cosф —2)(-sinф — + cosф —2) = ——, d e - / - . - k2 = V"e2 = (zss cosф —1 + z.« sin ф— 2 - rss —3 )X ds 2
X ( rs cos ф — 1 + rs sin ф — 2 + z , s — 3 ) = z , ss rs - rssz , s .
Вектор поворота (5) в случае осесимметричного деформирования (см. рис. 4) имеет следующий вид:
o = -Y- =-yPik— = Ysinф —1 -уcosф —2,(27)
Таким образом: o 1 = Y sin ф , o 2 = -Y cos ф , to " = 0, |to| = Y. Элементы матрицы поворота для преобразования (4) примут вид:
Хп = 1 - (1 - cos y ) cos2 ф , X 22 = 1 - (1 - cos y ) sin2 ф , X 33 = cos y , X 12 =- (1 - cos Y )sin ф cos ф , X 23 = sin y sin ф , X 31 =- sin y cos ф , (28) X 13 = sin y cos ф , X 21 = - (1 - cos Y )sin ф cos ф , X 32 =- sin y sin ф .
Векторы погонных внутренних усилий и моментов в силу осевой симметрии деформирования имеют вид:
T = Т 1 ф г,, T 2 = т 2 т 2z — z , M - 1 = M 1 s e = M 1 st,s — + M 1 s z , s — z , M 2 = M 2 ф — ф .
Кривизны координатных линий на деформированной поверхности с учетом (6), (24) и (28) запишутся следующим образом:
, d - ( - . 1 d - ( - .
ki = —г e =^---г — e ds1 r (1 + e1) дф
= ———7 (z s cos Y+ r sin Y r(1 + 61 )v ’’
.. дe3* -, 1 дe( -, k2 = Г e2 =3------7
д s 2 ( 1 + 6 2 ) д s
= (T+6-j( *"-r ■ - r- z ■ +' > •
Вычислим изменение кривизн при деформировании:
. 1
A k 1 = k 1 - k 1 =—---- -( z s cosY+ r s sinY )— -, (32)
r (1 + 6) ’’
A k 2 = k ’ - k 2 = ( 1 + 1 6 2' ) ( z ■ ss r s - r ss z ■ s + Y , s ) - ( z , ss r: s - r ss z , s ) .(33)
Необходимо отметить что в выражения для изменения кривизн (32) и (33) входят начальные кривизны. Начальная кривизна меридиана k 2 = zssrs - rsszs содержит вторые производные функций r ( s ) и z ( s ) , что может усложнить формирование исходных данных при наличии скачков кривизн. Обычно в таких случаях производят стыковку отдельных решений на каждом участке, где кривизна непрерывна и нет изломов. Программная реализация метода конечных разностей, применяемая в данной работе для решения краевой задачи, позволяет проводить стыковку решений в автоматическом режиме без участия расчетчика.
При малых продольных деформациях (удлинениях) выражения для приращения кривизн примут следующий вид
A k 1 = - [ z , s ( cos y- 1 ) + r s s sin Y ] , A k 2 =y , s , (34)
то есть если деформации предполагаются малыми по смыслу задачи, то задание начальной кривизны не обязательно.
Вектор перемещений в случае осесимметричного деформирования выглядят следующим образом:
U = Ur - r + U z — z = U r cos ф - + U r sin ф — 2 + Uz - 3. (35)
Преобразуем выражения для производных перемещений:
д U 1 д U 1rr - -
= = U r —ф = 61 —ф , дs1 r дф r отсюда следует выражение для окружной деформации (удлинения):
6 1 = 1 U r • (36)
r
Из соотношения (13) с учетом (28) и (12) получим:
* *
U" = UT = E C 1 + 6 2 )( d r + d z 6 ) - r s ] — r + d s 2 ds
+ [(1 + 62 )( dz - d,.6)-Z s ] *., где dT, - dT,
6= z 2'J 2z , dr =(rs cosY-z,$ sinY), к Gh ’ ’ dz = (rs sin y+ z s cos y) ■
Таким образом получены выражения для изменения кривизн (32) и (33) выражение для удлинения в окружном направлении (36) дифференциальные уравнения для перемещений (37). Получим уравнения равновесия и физические соотношения с учетом изменения объема при больших перемещениях.
До сих пор (выше) использовалась естественная параметризация функций – s 1 s 2 s за исключением уравнений равновесия (15) и (16) где введены безразмерные параметры на поверхности - a 1 , a 2 и параметры Ламе A 1, A 2. На практике удобно пользоваться произвольной безразмерной параметризацией. Для случая осесимметричной оболочки введем безразмерный параметр длины меридиана 5 , то есть s = s ( 5 ) ■ Определим параметры Ламе следующими соотношениями:
ds dsx = Axda, = rdф, ds2 = A2da2 =—d5, (39)
d 5
то есть параметры Ламе A1 = r, A 2 = s 5, и da1 = dф, d a2 = d5 ■
Вычислим производные, входящие в уравнения равновесия (15), (16) по безразмерным параметрам поверхности:
d [A2 (1 + 62) 71 ] = d [ A2(1 + 62)Т1ф — ] = da1
dT.i—
= A2(1 + 62)-^ = - A2(1 + 62T —r, d ф d [ A (1 + 61) 72 ] = d [ r (1 + 61) 72 ] = da 2
_ d [ r ( 1 + 6 1 ) T 2 r ] * d [ r ( 1 + 6 1 ) T 2 z ] *
d 5 —r + d 5
d [ A2 (1+ 62) M 1 ] da, d (M ^r i— + M^zi)
= A2 (1 + 62) = A2 (1 + 62) M 1 srs—ф, d ф d [ A (1+ 61) AM 2 ] = d [ r (1-г) M 2ф —ф ] = d [ r (1+ 61) M 2ф ] *
da2 d 5 d 5
Таким образом, уравнения равновесия сил в проекциях на оси цилиндрической системы координат ir , iz имеют следующий вид:
d [ r ( 1 + 6 . ) T 2 r ]
-------"ZZ--A2 (1 + 62)Т1ф + rA2 (1 + 61 )(1 + 62 ) qr = 0, d5 (40)
d [ r ( 1 + 6 1 ) T 2 ]
——d^——+rA 2 (1+61 )(1+62) qz = 0, где — = qrir + qziz - внешняя нагрузка. Уравнение равновесия в проекции на ось —ф удовлетворяется тождественно.
Уравнение равновесия моментов в проекции на ось — ф :
d [ r (1 + 6, ) M 2 ]
[ ( d 5 * ] + A ( 1 + 6 2 ) M 1 , r , +
+ rA 2 ( 1 + 6 1 )( 1 + 6 2 ) x (41)
X[ T 2 r ( rs sin Y+ zs cos y ) - T 2 z ( rs cos Y- zs sin y ) ] = 0.
Физические соотношения (17)–(20) для осесимметричной оболочки примут следующий вид:
*
N 1 = T 1 ф = -г ( 6 1 +V6 2 ) , (42)
1 -V
N 2 = T 2 r ( rs cos Y- z s sin y ) +
+ T 2 z ( r s sin Y+ z , s cos y ) = Eh -y ( 6 2 +v6 1 ) ,
1 -V
Eh *3
M 1 = M 1 s = ( A k 1 +VA k 2 ) ,
12 ( 1 -V 2 )
Eh *3
M 2 = - M 2 ф = —т:--- 2y ( A k 2 +VA k 1 ) , 12 ( 1 -V )
где h * – толщина деформированной оболочки (при коэффициенте Пуассона V > 0 при растяжении происходит утонение, а при сжатии - утолщение); 6 1 , 6 2 - меры продольных деформаций.
В настоящее время тензор логарифмической деформации является одной из наиболее популярных мер деформации тела при решении геометрически нелинейных задач [37], логарифмические деформации выражаются через удлинение следующим образом:
6 1 = ln ( 1 + 6 1 ) , 62 = ln ( 1+ 62 ) . (46)
Необходимо отметить, что при малых деформациях или при геометрически линейной постановке задачи удлинения и меры деформации равны: 6 1 = 6 1 , 6 2 = 6 2. Это следует в том числе из формул (46).
Определим изменение толщины при деформировании через изменение объема. До деформации элементарный объем
V = р • h • ds* • ds *, после деформирования объём можно выразить так:
V * = p • h * • ds** • ds * = p • h • fh •(I + e* )-(1 + e* )• ds* • ds *, где новую толщину представим в виде произведения старой толщины и некоторой функции, описывающей изменение толщины, подлежащей определению: h = h • fh. Имеет место следующее отношение:
V* _P-h• fh •(* + e*)•(* + e*)• ds* • ds*V p • h • ds* • ds*= fh •(* + e*)•(* + e*), с другой стороны, известно [38–40]:
*
— = (*+e* )(* + e2 )(* + 63), следовательно, fh = 1 + e3.
Запишем обобщённый закон Гука:
e* = E[o* -v(g2 +03)J, e* = E[°* -v(o +O3)J,E3 = [o3-v(°* +o*)J ,
E так как рассматриваются тонкие оболочки, положим 03 v(e* +e*)
=0, тогда e3 =---------, и с учетом (46) в итоге имеем следующее выражение для функции изменения толщины:
M * s = thf h ( A k * + vA k * ) , (5*)
M * 9=- t f 3 ( A k * +vA k * ) , (5*)
из (50) определим меру деформации в меридиональном направлении:
s , 5 f h
f h = exP
v v-*
В практических целях важно привести уравнения к безразмерному виду. Введем в рассмотрение безразмерные величины следующим образом:
s = s , h = h , r = r , z = z , U = U , T = (* 2 ) T , I I I I I Eh t
M ,
Eh 2t*
где t - характерный геометрический размер оболочки (например: длина меридиана, радиус). Кроме того, перейдем к параметризации функций с помощью 5 .
Физические соотношения (42)–(45) с учётом (48) перепишутся следующим образом:
T*Ф = fh (e* +ve*),
[T*r (r5 cos Y-z 5 sin y) + T*z (r5 sin Y+z 5 cos y)1 = s^ [ " A ! ,s /j (50)
= fh (e* +ve*),
x [ T * r ( r ^ cos у- z 5 sin y ) + T * z ( r ^ sin y+ z 5 cos y ) J -ve * .
Здесь необходимо отметить, что в выражение (53) входит (47), что образует нелинейное уравнение относительно меры деформации e * . В программной реализации это уравнение решается методом простых итераций.
Упростим и перепишем уравнения равновесия (40) с учетом (48) и (39):
dT 2 r d 5

e*-5 If +
( * + e * ) J * r
+
s i(*+£*) r ( * +e , ) "
- (*-v* )
- s , 5 ( * +e* )^r" q-Eh
dT*^ = -fr^+T^^bfIT, - s* (*+e2)h*^^*h d5 ( r (* + e*)J *z ’5V *^ Eh
d5 t r (* + e*)J *Ф
r E {* + E2) - 4(— *4 m 1 r (* +e * )
T (*+ e*) h
T * r ( r^ sin у+ z 5 cos y ) -
- T * z ( r h; cos Y- z , 5 sin y )
qz ,
Из физического соотношения (5*) выразим y s , при больших продольных деформациях и выражений для изменения кривизн (32), (33) получим:
Y , s =- ( * + e * ) M44 -V ( * + e * ) A k * +e * ( z ss r s t hf h
где A k * =
z , s [cosY-(1 + E 1) ] + r s sin Y
(*+ e*) r
r ss z ,s ) , (54)
при малых продольных деформациях из выражений для кривизн (34), получим
Y,s =
M * Ф
t hf h3
где A k * = —[ zs ( cos Y- * ) + rs sin y J .
Таким образом, определив y s по формуле (54) или (55), изменение кривизны A k * будет определено по формуле (33) или (34) соответственно, тогда M 1 s может быть определен из физического соотношения (51).
В итоге с учетом (48) и переходом к параметризации по 5 окончательно имеем разрешающую систему 6 геометрически нелинейных дифференциальных уравнений первого порядка относительно 6 функций – U r , U z , Y, T 2 r , T 2z , M 2 Ф , описывающих напряженно-деформированное состояние осесимметричной оболочки при больших продольных деформациях, перемещениях и поворотах, что будет иметь следующий вид:
– кинематические соотношения:

e 1-5 __I e -1 ГХу
( 1 + 6 1 ) J ’ 6 1, 5 = I r2 Ur
6 1 = 1 U r , r
T 2 r dr + T 2 z dz
2 s , 5 f h ( 6 2 )
_
1) dU T “ ( 1 + e 2 ) ( d r + d z 0 ) _ ^ ’
2) "" d ^ “ ( 1 + 6 2 ) ( d z _ d r 0 ) _ z , 5 ;
– уравнение упругости при больших продольных деформациях:
3) d Y = _ ( 1 +_6 2 ) s A m ) d 5 hf h 2 Ф
_ v ( 1 +e 2 ) s лА k i + Sr ( z , 55 Г 5 _ Г 55 z ^ ) - s , 5
где
А k 2 =
А k1 = ,1 . ( z,5 [cos Y_(i + 61 )] + Г5 sin y), s ,5r (1 + 61)
? 5s 5 _ 6 2 ( z 55 r, Г 55 z .J .
( 1 + 6 2 ) s ,3
;
– уравнение упругости при малых продольных деформациях:
3) d ? = _ A" M 2 ф _ v s , 5 А k 1 , d 5 hf h
1 ?.E где Аk1 = ^4z5(cos?_ 1) + г5 sinY1, Аk2 =— ; (58)
s , 5 r J s , 5
– уравнения равновесия:
di - S? - ( 1 _v 2 )
-
4) /; = _ AT 2 г + 4 bt^ s 5 ( 1 +6 2 ' q r ,
d 5 r Eh dT - (1 _v2)
-
5) T = _ AT 2 z _ S , 5 (1 + 6 2 )^-^ q z , (59)
d 5 E h
-
6) ' M / = _ AM 2 ф _ r4 BM 1 s _ 12(1 +6 2) ( T 2 Д _ T 2 z - r ) , (60) d 5 r h ' '
– дополнительные выражения и обозначения:
dr = ( Г , 5 cos ?_ z , 5 sin ? ) , dz = ( Г7^ sin ?+ z , 5 cos y ) ,
0= E ( d z T 2 r _ d r T 2z )
К G ( 1 _v 2 ) s , 5 fh ’
1 dUT- 1 B rd 5 J
6 2 = exp ( 6 2 ) _ 1,
(1 + 62 )(1 + 61) ’
v6 1 , fh ( 6 2 ) = exP -^( 6 1 +6 2 ) , v_ 1
6 1 = In ( 1 + 6 1 ) , (61)
T 1 Ф = f h ( 6 1 +v6 2 ) , M 1 s = hf h 3 ( А k 1 + vA k 2 ) .
Необходимо отметить, что имеется два варианта учета изменения кривизн: при больших продольных деформациях (57) и при малых (58). При тестировании уравнений вычисление изменений кривизны по формуле (58) дали лучшее приближение к решениям, получаемым в ANSYS.
Линеаризуем систему уравнений (56)–(60) относительно деформаций, поворотов, перемещений, усилий и моментов, получим геометрически линейную систему уравнений осесимметричной оболочки:
dU dU
1) = r 56 2 _ z , 5 Y+ z , 5 0 , 2) = z , 5 6 2 + Г 5 ? _ Г 5 0 ,
3) d ?=_ Д. M d 5 hf h
hf h 3
2 Ф
r 5 _ v^Y , r
4) dT 2- = ( v- 1 ) Г^ T 2 r +v z , 5 T 2 z + d 5 r r
+ (1 _v 2 ) ^^e.
5) dT 2 z =_ r , 5 t ’ d 5 r 2 z
dM 2 Ф d 5
_
( 1 _v 2
5 q r
Eh
s
, 5 Eh
q z ,
r
= ( v_ 1 ) "Y M 2 ф _ r
( 1 _v 2 ) 4 h ?_ 12 ( T 2 r z , 5 _ T 2 zrY , x ' r s^ h
где 6 1 = 4 Ur ,
r
E ( z , 5 T 2 r _ i ;5 T 2 z )
0 =-------;--------;------ •
К G (1 _v2) s, 5
62 = (T 2 гГ 5 + T 2 zz 5) _ v61, s ,5 ’
Необходимо отметить, что полученная система линейных дифференциальных уравнений (62) отличается от системы, полученной в работе [26], наличием слагаемых от поперечного сдвига (угол 0), а также множителей И ^ , которые появились при введении произвольной параметризации функций. В работе [26] рассматривается
частный случай системы (62), когда s ^ = 1, что соответствует введению параметризации £ = s / £ .
-
3. Программная реализация и тестовые расчеты
Полученные уравнения (56)–(62) совместно с краевыми условиями, наложенными на функции в начале и конце меридиана, представляют собой краевую задачу. Для решения краевой задачи был использован алгоритм [27; 28]. Полученные системы нелинейных и линейных уравнений внедрены в код программного комплекса DARSYS [41]. Для аппроксимации производных используются центральные разности и применяется алгоритм отложенной коррекции [27], повышающий точность решения.
Для тестирования уравнений были рассмотрены несколько простейших задач осесимметричного деформирования оболочек вращения. В качестве эталона для сравнения принимались результаты расчета в пакете ANSYS. Для этого разработаны макросы на языке APDL, позволяющие проводить параметрические расчеты при варьировании типа конечного элемента, нагрузки и степени дискретизации модели. В табл. 1–4 приведен набор макросов для расчета составной оболочки. В табл. 1 приведен текст главного макроса, из которого вариативно вызывается конфигурационный файл с конкретной геометрией оболочки, краевыми условиями, типом расчета.
Таблица 1
Макрос ядра для решения тестовых задач на языке APDL
Table 1
Core macro for solving test problems in the APDL
|
FINISH /CLEAR,START /UNITS,SI /nerr,0,,,,0 /uis,msgpop,3 START = 5 FINAL = 100 *do,E_TYPE,1,3 LEVEL=1 GEOMETRY='UGL1' *Do,VARIN,START,FINAL,1 PARSAV, ALL, Temp, txt /CLEAR,NOSTART PARRES, CHANGE, Temp, txt /PREP7 *ABBR,RELOAD,/INPUT,core,for *USE,GEOMETRY *if,E_TYPE,EQ,1,then ET,1,SHELL181 SECTYPE,,SHELL SECDATA,h fileadd='_181' *elseif,E_TYPE,EQ,2,then ET,1,SHELL43 R,1,h,h,h,h fileadd='_43' *elseif,E_TYPE,EQ,3,then ET,1,SHELL93 R,1,h,h,h,h fileadd='_93' *endif MP,EX,1,2E7 MP,PRXY,1,0.3 MP,DENS,1,7850 AMESH,ALL *if,CLAMPED,eq,1,then NSEL,S,LOC,Y,0 D,ALL,ALL,0 *else |
NSEL,S,LOC,Y,0 D,ALL,UY,0 D,ALL,ROTX,0 D,ALL,ROTZ,0 *endif NSEL,S,LOC,X,0 D,ALL,UX,0 D,ALL,ROTY,0 D,ALL,ROTZ,0 NSEL,S,LOC,Z,0 D,ALL,UZ,0 D,ALL,ROTX,0 D,ALL,ROTY,0 ALLSEL,ALL SFA,ALL,,PRES,PRESSURE /SOLU ANTYPE,STATIC NLGEOM,NONLIN SOLVE
*else isConverged=1 *endif *if,isConverged,eq,1,then /POST1 PLDISP,1 n_num=NODE(X0,Y0,0) *GET,Summ,NODE,n_num,U,SUM *cfopen,%filename%%fileadd%,prn,,APPEND
%I %G *cfclos *else LEVEL=LEVEL+1 *endif *enddo *USE,'PrintForm.for' *enddo |
Таблица 2
Макрос построения геометрии составной оболочки UGL0
Table 2
Macro for initializing the geometry of a combined shell UGL0
|
Alpha = ACOS(-1)/6 s=sin(Alpha) c=cos(Alpha) L = 0.3 H_ = 0.8 R = 0.5 K,1,0,0,0 K,2,0,0.01,0 K,3,0.5,0,0 |
K,4,R,H_,0 K,5,(R-L*s),(H_+L*c) L,3,4 L,4,5 AROTAT,1,2,,,,,1,2,90,NN ESIZE,(H_+L)/(NN-1) X0=(R-L*s) Y0=(H_+L*c) |
Таблица 3
Макрос управления при варьировании дискретизации составной оболочки UGL1
Table 3
Macro for varying the number of divisions of a combined shell UGL1
|
filename='UGL1' NN=VARIN h=0.02 *USE,'UGL0' |
PRESSURE=1*1e5 VAROUT=VARIN NONLIN=1 CLAMPED=1 |
Таблица 4
Макрос управления при варьировании нагрузки составной оболочки UGL2
Table 4
Macro for varying the loading of a combined shell UGL2
|
filename='UGL2' NN=50 h=0.02 *USE,'UGL0' !NROPT,FULL,,ON *if,VARIN,eq,START,then PRESSURE=1e4 P0=PRESSURE *else |
*if,isConverged,ne,0,then P0=PRESSURE *endif PRESSURE=P0+5e3/LEVEL *endif VAROUT=PRESSURE NONLIN=1 CLAMPED=1 |
-
4. Цилиндрическая оболочка
Рассмотрим задачу о деформировании цилиндрической оболочки под действием внутреннего распределённого давления P (рис. 5). Радиус R = 0,5 м, толщина h = 0,02 м, высота H = 0,7 м, модуль упругости материала E = 2 -107 Па, коэффициент Пуассона v = 0,3. Меридиан зададим следующим образом:
r ( ^ ) = R , z ( ^М- H , ( 0 <^< 1 ) , (63)
краевые условия:
при ^ = 0: T 2r = Tz = M 2ф = 0;
при ^ = 1: а) T 2 г = U z = M 2 ф = 0 , б) U r = Uz = у = 0 . (64)
На рис. 6 приведены зависимости полного перемещения верхней точки меридиана от числа разбиений, а также деформированные конфигурации, рассчитанные с помощью скрипта APDL (табл. 1–3) в ANSYS и по формулам (56)–(61) в DARSYS при значении давления P = 1,1 -105 Па при свободном опирании (см. рис. 6) и при защемлении (рис. 7).
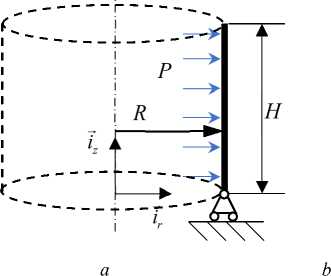
Рис. 5. Цилиндрическая оболочка. Расчетная схема: а – свободная; b – защемленная

Fig. 5. Cylindrical shell. Calculation scheme: a – free; b – pinched
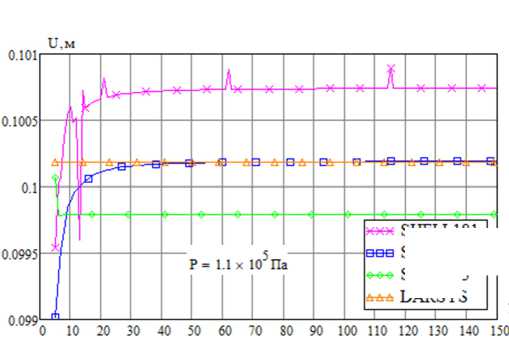
Рис. 6. Сходимость перемещения при варьировании числа разбиений и деформированная конфигурация свободной цилиндрической оболочки
SHELL 181
SHELL43
SHELL93
DARSYS
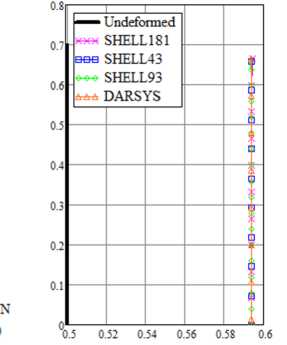
Fig. 6. Convergence of displacement with varying number of divisions and deformed configuration of a free cylindrical shell
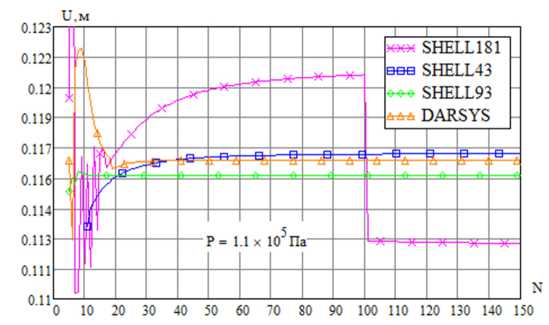
Рис. 7. Сходимость перемещения при варьировании числа разбиений и деформированная конфигурация защемленной цилиндрической оболочки
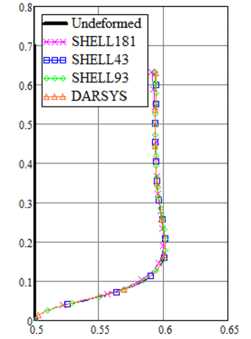
Fig. 7. Convergence of displacement with varying number of divisions and deformed configuration of the clamped cylindrical shell
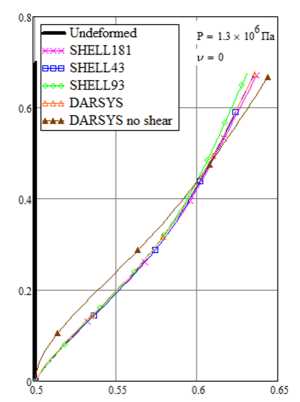
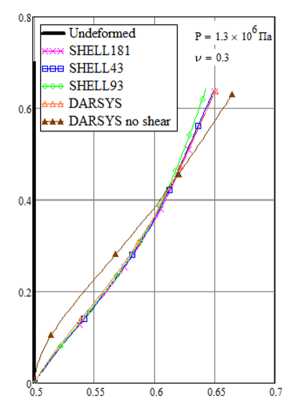
Рис. 8. Влияние учета сдвига при деформировании толстой цилиндрической оболочки
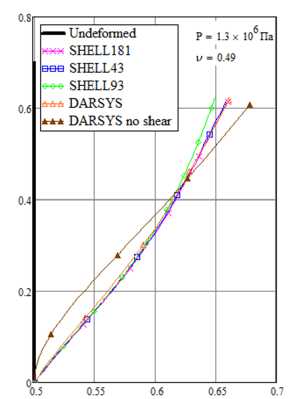
Fig. 8. The effect of shear on the deformed configuration of a thick cylindrical shell
При относительно малых толщинах оболочки влияние сдвиговых деформаций, учтенных формулой (38), мало. Для тестирования работоспособности полученных формул проведем расчет защемленной цилиндрической оболочки с увеличенной в 10 раз толщиной - h = 0,2 м с учетом сдвига и без него. На рис. 8 приведены рассчитанные конфигурации меридиана при давлении P = 1,3 -10 6 Па и разных коэффициентах Пуассона: V = 0; 0,3; 0,49. Из рис. 8 видно, что учет сдвига по разработанным формулам вносит существенный вклад для толстой оболочки и достаточно хорошо согласуется с расчетами в ANSYS. Необходимо отметить, что наилучшую сходимость результатов с ANSYS показали расчеты с коэффициентом коррекции сдвига к = п 2 /12 .
На рис. 9 приведены зависимости перемещения верхней точки меридиана в зависимости от давления, рассчитанного разными КЭ ANSYS и в DARSYS по разработанным формулам. Из данных рис. 9 видно, что результаты хорошо согласуются между собой.
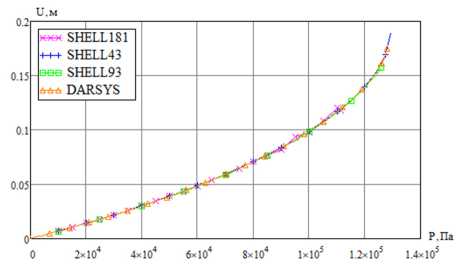
Рис. 9. Зависимость перемещения от давления защемленной цилиндрической оболочки
Fig. 9. Pressure dependence of displacement of the clamped cylindrical shell
Необходимо отметить, что нелинейность графиков на рис. 9 обусловлена не только и не столько геометрической нелинейностью решаемых уравнений, сколько уменьшением толщины и увеличением площади действия внутреннего давления при деформировании.
Сопоставления с ANSYS для линейных уравнений (62) успешно проведены в процессе их разработки, но результаты здесь не представлены.
-
5. Сферическая оболочка
Рассмотрим задачу о деформировании сферической оболочки радиуса R = 0,5 м под действием внутреннего давления Р . Толщина h = 0,02 м, материал взят из предыдущего примера.
В качестве безразмерного параметра длины удобно выбрать угол между радиус-вектором и осью ir : 0 < ^ < п / 2, тогда меридиан можно описать так:
-
r ( ^ ) = R cos ( ^ ) + 8, z ( ^ ) = R sin ( ^ ) , (65)
где 5 = 10 12 << R - константа для разрешения численной неопределенности в верхней точке. Краевые условия:
при ^ = 0 : T, r = Uz =Y= 0 ;
при ^ = п /2 : U r = T2z = y= 0 . (66)
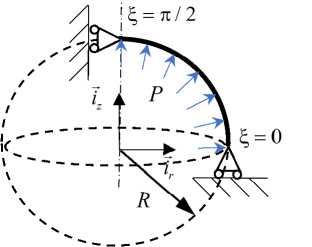
Рис. 10. Сферическая оболочка. Расчетная схема
Fig. 10. Spherical shell. Calculation scheme
На рис. 11 приведены зависимости полного перемещения точек меридиана от числа разбиений (перемещения всех точек равны), рассчитанные с помощью скрипта APDL в ANSYS и по формулам (56)–(61) в DARSYS при значении давления P = 4 - 10 5 Па. На рис. 12 приведены рассчитанные зависимости перемещения сферической оболочки от давления. Из рисунков видно, что результаты хорошо согласуются.
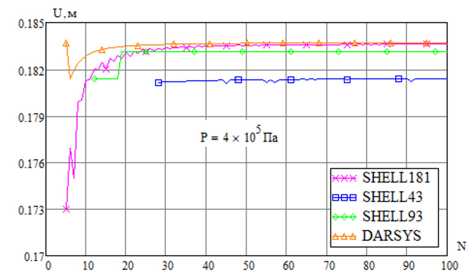
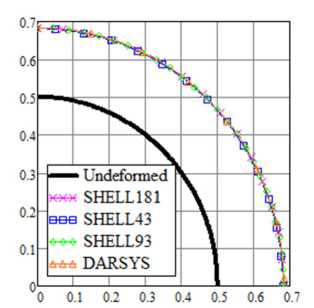
Рис. 11. Сходимость перемещения при варьировании числа разбиений сферической оболочки
Fig. 11. Convergence of displacement when varying the number of divisions of a spherical shell
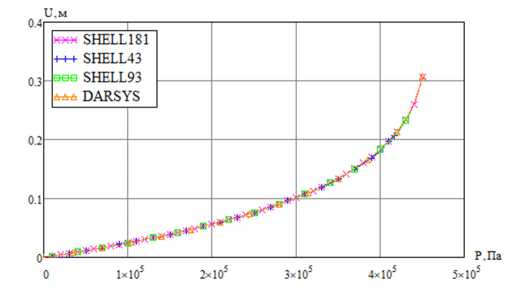
Рис. 12. Зависимость перемещения точки сферической оболочки от давления
перемещения эллиптической оболочки от давления. Из данных рисунков видно, что результаты хорошо согласуются.
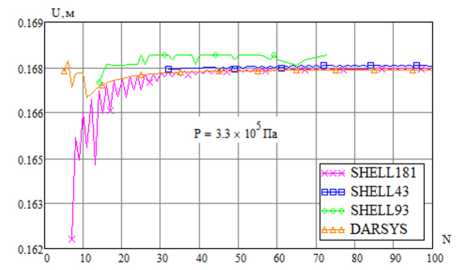
Fig. 12. Pressure dependence of displacement of the spherical shell
-
6. Эллиптическая оболочка
Рассмотрим задачу о деформировании эллиптической оболочки с полуосями а = 0,4 м, b = 2 а под действием внутреннего давления P (рис. 13). Толщина и материал взяты из предыдущих примеров.
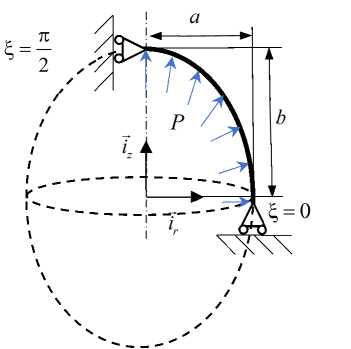
Рис. 13. Эллиптическая оболочка. Расчетная схема
Fig. 13. Elliptical shell. Calculation scheme
В качестве безразмерного параметра длины выбран угол между радиус-вектором и осью i r : 0 <^<п / 2, тогда меридиан можно описать так:
r ( ^ ) = a cos ( ^ ) + 5, z ( ^ ) = b sin ( ^ ) , (67)
где 5 = 10 - 12 << R - малая константа для разрешения неопределенности в полюсе. Краевые условия совпадают с условиями для сферы (66).
На рис. 14 приведены зависимости полного перемещения точки меридиана, лежащей на малой полуоси ir ( ^ = 0) от числа разбиений, рассчитанные с помощью скрипта APDL в ANSYS и по формулам (56)–(61) в DARSYS при значении давления P = 3,3 -10 5 Па. На рис. 15 приведены рассчитанные зависимости
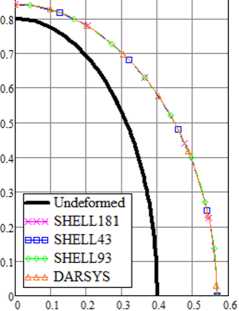
Рис. 14. Сходимость перемещения при варьировании числа разбиений эллиптической оболочки и деформированная конфигурация
Fig. 14. Convergence of displacement with a varying number of divisions of elliptic shell
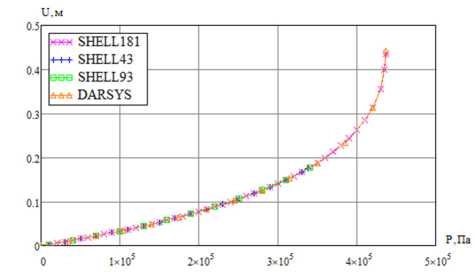
Рис. 15. Зависимость перемещения точки экватора эллиптической оболочки от давления
Fig. 15. Pressure dependence of the displacement of the equator point of the elliptical shell
Необходимо отметить, что предлагаемые уравнения геометрически линейного и нелинейного деформирования, полученные для произвольной параметризации меридиана в отличие от линейных уравнений, полученных в [26], где для задания геометрии эллиптической оболочки пришлось бы привлекать громоздкие формулы связи между длиной дуги и угла, в формулах (56)–(62)
параметризация очень проста в использовании. Кроме того, применение метода конечных разностей в конечном счете приводит к решению СЛАУ с матрицами, которые не содержат параметр ^ в явном виде, следовательно, формулирование исходных данных не требует обязательной записи аналитических формул для меридиана, и они могут формироваться поэлементно, аналогично формированию исходных данных для применения метода конечных элементов.
-
7. Коническая оболочка
Рассмотрим задачу о деформировании конической оболочки под действием внутреннего распределённого давления P , радиус окружности дна R = 0,5 м, угол конуса ф = п /6 (рис. 16), толщина и параметры материала взяты из предыдущих примеров. Точки меридиана опишем следующими формулами:
-
r ( ^ ) = R ^ + 5, z ( ^ ) = R M- , о<^< 1, (68)
tan ф где 5 = 10-12 << R - малая константа для разрешения неопределенности в вершине конуса. Краевые условия:
при ^ = 0 : Тг, = Ur = у = 0 ;
при ^ = 1: U r = Uz = у = 0 . (69)
Здесь необходимо отметить, что обезразмеривание величин в (48), в частности перемещений и длин, можно проводить к единице длины, и не обязательно использовать реальные геометрические параметры, связанные с оболочкой. Поэтому здесь и в других примерах для описания меридиана используются размерные величины длин, а получаемые результаты при выборе разных параметров обезразмеривания длин неразличимы между собой.
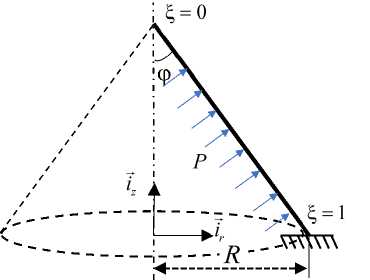
Рис. 16. Коническая оболочка. Расчетная схема
-
Fig. 16. Conical shell. Calculation scheme
На рис. 17 приведены зависимости полного перемещения вершины конуса ( ^ = 0) от числа разбиений, рассчитанные с помощью скрипта APDL в ANSYS и по формулам (56)–(61) в DARSYS при значении давления P = 3,5 • 105 Па. На рис. 18 приведены рассчитанные зависимости перемещения от давления. Из рисунков видно, что результаты хорошо согласуются.
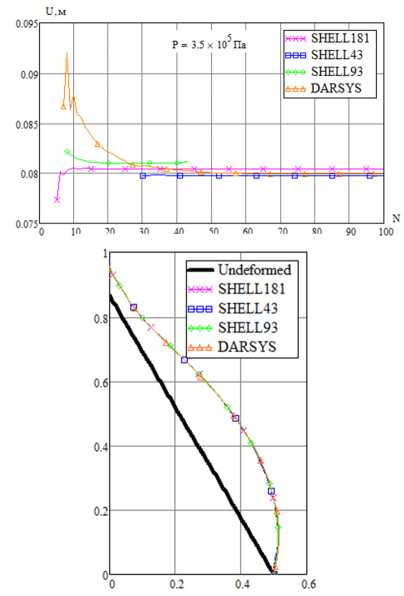
Рис. 17. Сходимость перемещения при варьировании числа разбиений конической оболочки и деформированная конфигурация меридиана
-
Fig. 17. Convergence of displacement when varying the number of divisions of the conical shell and deformed meridian configuration
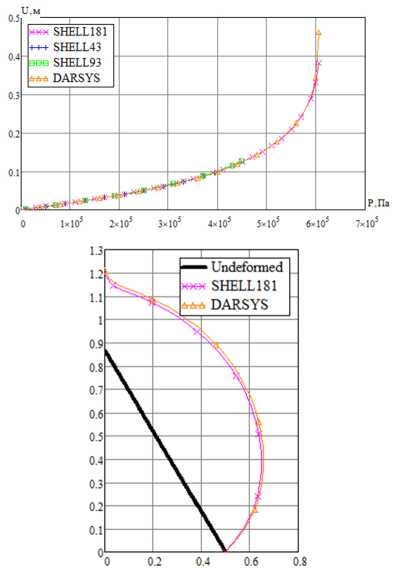
Рис. 18. Зависимость перемещения вершины конической оболочки от давления и деформированная конфигурация при давлении P =6e5 Па
-
Fig. 18. Pressure dependence of conical shell top displacement and deformed configuration at pressure P =6e5 Pa
8. Составная оболочка
Рассмотрим задачу о деформировании составной оболочки под действием внутреннего распределённого давления P , радиус цилиндра R = 0,5 м, высота цилиндра H = 0,8 м, длина образующей конуса L = 0,3 м, ф = п / 6 , толщина и материал взяты из предыдущих примеров. Координаты точек меридиана удобно задать двумя участками на интервале 0 < Ч < 2 следующим образом:
1.1
0.9
0.S
0.7
0.6
0.5
0.4
0.3
0.2
0.1
r ( Ч ) =
J R - L sin ( ф )( 1 — Ч ) , 0 <Ч< 1, [ R , 1 <Ч< 2,
[ H + L cos ( ф )( 1— Ч ) , 0<Ч< 1
z ( Ч ) = 1
[ H ( 2-ч ) , 1 <Ч< 2.
Краевые условия:
при ч = 0: T 2 г = T 2 z = M 2 ф = 0;
при Ч = 2: Ur = Uz =у = 0. (71)
Условия стыковки в DARSYS реализованы в автоматическом режиме (достаточно указать точки, в которых есть разрывы функций исходных данных), однако разработанные уравнения могут решаться без стыковки, но это приводит к пилообразному изменению (в пределах погрешности вычислений) рассчитываемого перемещения точки при плавном изменении дискретизации.
%.1 0.2 0.3 0.4 0.5 0.6 0.7
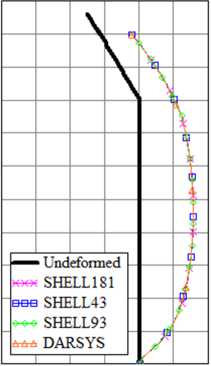
Рис. 20. Сходимость перемещения при варьировании числа разбиений составной оболочки и соответствующая деформированная конфигурация
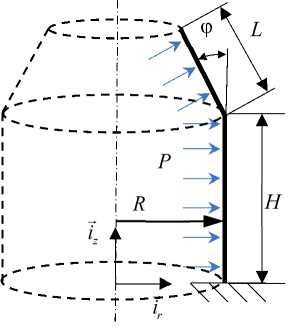
Рис. 19. Составная оболочка. Расчетная схема
Fig. 19. Combined shell. Calculation scheme
-
Fig. 20. Displacement convergence when varying the number of divisions of the combined shell and the corresponding deformed configuration
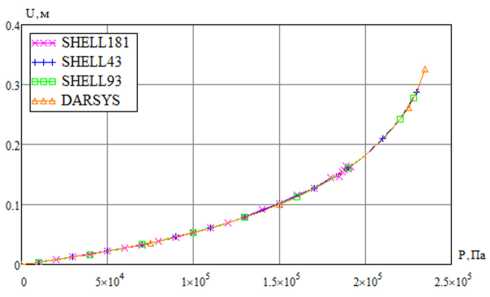
Рис. 21. Зависимость перемещения верхней точки меридиана составной оболочки от давления
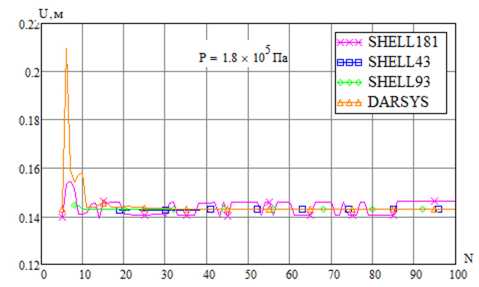
На рис. 20 приведены зависимости полного перемещения верхней точки меридиана составной оболочки ( Ч = 0) от числа разбиений, рассчитанные с помощью скрипта APDL в ANSYS и по формулам (56)–(61) в DARSYS при значении давления P = 1.8 - 105 Па . На рис. 21 показаны рассчитанные зависимости перемещения той же точки от давления. Из рисунков видно, что результаты хорошо согласуются.
-
Fig. 21. Pressure dependence of the displacement of the upper meridian point of the combined shell
Заключение
В работе представлен вывод разрешающей системы геометрически нелинейных дифференциальных уравнений статического деформирования осесим- метричной оболочки вращения на основе общих уравнений оболочки произвольной формы, записанных в глобальных координатах. Полученные уравнения учитывают большие продольные деформации, поперечных сдвиг, изменение толщины при деформировании, произвольную геометрическую форму меридиана. Уравнения внедрены в собственный программный комплекс по расчету механики стержневых систем – DARSYS, в котором реализован алгоритм численного
Список литературы Расчет статического деформирования осесимметричных оболочек вращения по дифференциальной модели
- Аннин, Б.Д. Неклассические модели теории пластин и оболочек / Б.Д. Аннин, Ю.М. Волчков // Прикладная механика и техническая физика. – 2016. – № 5. – С. 5–14. doi: 10.15372/PMTF20160501
- A nonlocal nonlinear stiffened shell theory with stiffeners modeled as geometrically-exact beamsк / Q. Zhang, S. Li, A.M. Zhang, Y. Peng, K. Zhou // Computer Methods in Applied Mechanics and Engineering. – 2022. – Vol. 397. doi: 10.1016/j.cma.2022.115150
- Madenci, E. Peridynamic Theory / E. Madenci, E. Oterkus // Peridynamic theory and its applications. – NY: Springer New York, 2014. – P. 19–43. doi: 10.1007/978-1-4614-8465-3_2
- Implicit differentiation-based reliability analysis for shallow shell structures with the Boundary Element Method / M. Zhuang, L. Morse, Z. Sharif Khodaei, M.H. Aliabadi // Engineering Analysis with Boundary Elements. – 2023. – Vol. 156. – P. 223–238. doi: 10.22364/mkm.57.6.07
- Абросимов Н.А., Баженов В.Г. Нелинейные задачи динамики композитных конструкций. – Нижний Новгород: Изд-во Нижегородского гос. ун-та, 2002. – 399 с.
- Ахундов, В.М. Метод неявных конечных разностей в механике деформирования однородных и кусочно-однородных тел / В.М. Ахундов // Механика композитных материалов. – 2021. – Т. 57, № 6. – С. 1129–1154. doi: 10.22364/mkm.57.6.07
- Maksimyuk, V.A. Variational finite-difference methods in linear and nonlinear problems of the deformation of metallic and composite shells (review) / V.A. Maksimyuk // International Applied Mechanics. – 2012. – Vol. 48, no. 6. – P. 613–687. doi: 10.1007/s10778-012-0544-8
- Buckling analysis of laminated composite elliptical shells using the spline finite strip procedure [Электронный документ] / N. Korkeai, A. Alizadeh, D. Poorveis, S. Moradi, P. Pasha // Heliyon. – 2023. – Vol. 9, iss. 9. doi: 10.1016/j.heliyon.2023.e19328
- Chang-New, Chen Differential quadrature finite difference method for structural mechanics problems / Chen Chang-New // Communications in Numerical Methods in Engineering. – 2001. – Vol. 17, iss. 6. – P. 423–441. doi: 10.1002/cnm.418
- Барулина, М.А. Применение обобщенного метода дифференциальных квадратур к решению двумерных задач механики / М.А. Барулина // Известия Саратовского университета. Новая серия. Серия: Математика. Механика. Информатика. – 2018. – Т. 18, № 2. – С. 206–216. doi: 10.18500/1816- 9791-2018-18-2-206-216
- Tornabene, F. Free vibration analysis of laminated doubly-curved shells with arbitrary material orientation distribution employing higher order theories and differential quadrature method / F. Tornabene, M. Viscoti, R. Dimitri // Engineering Analysis with Boundary Elements. – 2023. – Vol. 152. – P. 397–445. doi: 10.1016/j.enganabound.2023.04.008
- Natural vibration of an elastically supported porous truncated joined conical-conical shells using artificial spring technology and generalized differential quadrature method / H. Li, Y.X. Hao, W. Zhang, L.T. Liu, S.W. Yang, Y.T. Cao // Aerospace Science and Technology. – 2022. – Vol. 121, iss. 107385. doi: 10.1016/j.ast.2022.107385
- Smith, T.A. Numerical stability analysis for the explicit high-order finite difference analysis of rotationally symmetric shells / T.A. Smith // Journal of Sound and Vibration. – 2008. – Vol. 312, iss. 3. – P. 418–441.
- Коровайцева, Е.А. Применение метода дифференцирования по параметру в решении нелинейных задач стационарной динамики осесимметричных мягких оболочек / Е.А. Коровайцева // Вестник Самарского государственного технического университета. Серия: Физико-математические науки. – 2021. – Т. 25, № 3. – С. 556–570. doi: 10.14498/vsgtu1855
- Коровайцева, Е.А. К обоснованию однозначности продолжения решения задач о деформировании мягких оболочек методом дифференцирования по параметру / Е.А. Коровайцева // Проблемы прочности и пластичности. – 2022. – Т. 84, № 3. – С. 343–350. doi: 10.32326/1814-9146-2022-84-3-343-350
- Подкопаев, С.А. Численное моделирование закритического нелинейного деформирования осесимметричных мембран / С.А. Подкопаев // Математическое моделирование и численные методы. – 2020. – № 1(25). – С. 64–87. doi: 10.18698/2309-3684-2020-1-6487
- Application of the method of finite differences to the calculation of shallow shells [Электронный документ] / I. Hamzaev, K. Gapparov, E. Umarov, Z. Abdullaev // Universum: технические науки. – 2021. – Vol. 3, no. 84. – P. 71–76. doi: 10.32743/UniTech.2021.84.3-4.71-76
- Morozov, E.V. Finite difference method for the analysis of filament wound composite shells / E.V. Morozov, E.G. Evseev // Proceedings of ICCM–11, Gold Coast – Australia, 14th-18th July 1997. – P. 730–7370.
- Беляев, А.К. Теоретическое и экспериментальное исследование напряженно-деформированного состояния сильфонных компенсаторов как упругих оболочек / А.К. Беляев, Т.К. Зиновьева, К.К. Смирнов // Научно-технические ведомости Санкт-Петербургского государственного политехнического университета. Физико-математические науки. – 2017. – Т. 10, № 1. – С. 9–19. doi: 10.18721/JPM.10101
- Барменкова, Е.В. Применение метода конечных разностей к задачам изгиба прямоугольных плит на упругом основании [Электронный ресурс] / Е.В. Барменкова // Инженерный вестник Дона. – 2023. – № 6(102). – С. 635–644. – URL: http://ivdon.ru/ru/magazine/archive/n6y2023/8487 (дата обращения: 16.10.2023).
- Языев, С.Б. Выпучивание прямоугольных пластин при нелинейной ползучести / С.Б. Языев, А.С. Чепурненко // Advanced Engineering Research (Rostov-on-Don). – 2023. – Т. 23, № 3. – С. 257–268. doi: 10.23947/2687-1653-2023-23-3-257-268
- Левин, В.Е. Метод конечных и граничных элементов в динамике конструкций летательных аппаратов: специальность 05.07.03 «Прочность и тепловые режимы летательных аппаратов»: дис. … д-ра техн. наук / В.Е. Левин; Новосибирский государственный технический университет. – Новосибирск, 2001. – 341 c.
- Fluid–shell structure interactions with finite thickness using immersed method / Narendra S. Nanal, Scott T. Miller, Jesse D. Thomas, Lucy T. Zhang // Computer Methods in Applied Mechanics and Engineering. – 2023. – Vol. 403, part A, iss. 115697. doi: 10.1016/j.cma.2022.115697
- Free and forced vibration of fluid-filled laminated cylindrical shell under hydrostatic pressure / J-h Wu, R. Liu, Y. Duan, Y-d Sun // International Journal of Pressure Vessels and Piping – 2023 – Vol. 202, iss. 104925. doi: 10.1016/j.ijpvp.2023.104925
- Amabili, M. Non-linear dynamics of cantilevered circular cylindrical shells with thickness stretch, containing quiescent fluid with small-amplitude sloshing / M. Amabili, H.R. Moghaddasi // Journal of Sound and Vibration – 2023. – Iss. 118052. doi: 10.1016/j.jsv.2023.118052
- Применение глобальных координат в модели составной осесимметричной оболочки при анализе ее статического и динамического поведения / В.Е. Левин, А.Н. Пель, Д.А. Красноруцкий, П.З. Алюкаев // Научный вестник Новосибирского государственного технического университета. – 2013. – № 4(53). – С. 114–123
- Pereyra, V. Pasva3: An adaptive finite difference fortran program for first order nonlinear, ordinary boundary problems / V. Pereyra // Lecture Notes in Computer Science. – 1979. – Vol. 76. – P. 67–88
- Пустовой, Н.В. Алгоритм численного решения нелинейной краевой задачи динамического деформирования тонкого стержня / Н.В. Пустовой, В.Е. Левин, Д.А. Красноруцкий // Вестник Пермского национального исследовательского политехнического университета. Механика. – 2014. – № 2. – С. 168–199.
- Timoshenko, S.P. The course of elasticity theory / S.P. Timoshenko // Bars and Plates – St. Petersburg: Kollins Printing House, 1916 – Vol. 2.
- Freund, J. Shear and torsion correction factors of Timoshenko beam model for generic cross sections / J. Freund, A. Karakoç // Res. Eng. Struct. Mat. – 2016. – Vol. 2. – P. 19–27. doi: 10.17515/resm2015.19me0827
- Григолюк, Э.И. Неклассические теории колебаний стержней, пластин и оболочек [Текст] / Э.И. Григолюк, И.Т. Селезов. – М: ВИНИТИ, 1973 – 273 c.
- Mindlin, R.D. Influence of rotary inertia and shear on flexural motions of isotropic elastic plates / R.D. Mindlin // J. Appl. Mech. – 1951 – Vol. 18. – P. 31–38.
- Жилин, П.А. Прикладная механика. Основы теории оболочек: учебное пособие / П.А. Жилин. – СПб.: Изд-во Политехн. ун-та, 2006 – 168 c.
- Cowper, G.R. The shear coefficient in Timoshenko’s beam theory / G.R. Cowper // Journal of Applied Mechanics – 1966 – Vol. 33, iss. 2. – P. 335–340. doi: 10.1115/1.3625046
- Franco-Villafañe, J.A. On the accuracy of the Timoshenko beam theory above the critical frequency: best shear coefficient / J.A. Franco-Villafañe // Journal of Mechanics. – 2016. – Vol. 32, no. 5. – P. 515–518. doi: 10.1017/jmech.2015.104
- Филин, А.П. Элементы теории оболочек / А.П. Филин. – 3-е изд., перераб. и доп. – Л.: Стройиздат. Ленингр. Отдние, 1987. – 384 с.
- Садаков, О.С. Об использовании тензора логарифмической деформации / О.С. Садаков, А.О. Щербакова // Вестник Южно-Уральского государственного университета. Серия: Математика. Механика. Физика. – 2014. – Т. 6, № 3. – С. 78–85.
- Новожилов, В.В. Линейная теория тонких оболочек / В.В. Новожилов, К.Ф. Черных, Е.И. Михайловский. – Л.: Политехника, 1991. – 655 с.
- Новожилов, В.В. Основы нелинейной теории упругости / В.В. Новожилов; под общ. ред. проф. А.И. Лурье и проф. Л.Г. Лойцянского. – М.: Гостехиздат, 1948. – 211 с.
- Ляв, А. Математическая теория упругости / А. Ляв. – М: ОНТИ, 1935. – 674 с.
- Красноруцкий, Д.А. Программный комплекс для моделирования механики системы тонких упругих стержней / Д.А. Красноруцкий, П.А. Лакиза, Д.Р. Шелевая // Краевые задачи и математическое моделирование: Тематический сборник научных статей; под общ. ред. Е.А. Вячкиной. – Новокузнецк: Кузбасский гуманитарно-педагогический институт федерального государственного бюджетного образовательного учреждения высшего образования «Кемеровский государственный университет», 2023. – С. 57–60.
