Расчёт угловых координат для системы управления двухзвенным манипулятором промышленного робота

Автор: Глушко С.П.
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 4 т.22, 2022 года.
Бесплатный доступ
Введение. Одной из задач двухзвенных манипуляторов промышленных роботов, выполняющих перемещение рабочего органа по сложным траекториям (например, роботов-сварщиков), является необходимость тщательного программирования их движения. Для этих целей используются методы ручного программирования или методы обучения. Эти методы достаточно трудоёмки и требуют высокой квалификации обслуживающего персонала. Возможным вариантом решения проблемы программирования перемещений манипулятора является моделирование движения с расчётом угловых координат. Это может способствовать упрощению геометрической адаптации манипулятора в процессе отладки управляющей программы. Поэтому целью работы явился расчет координат для программирования системы управления двухзвенным манипулятором, действующим в угловой системе координат и перемещающим рабочий орган по сложной траектории (например, при сварке автомобильных кузовов). Материалы и методы. Рассмотрен двухзвенный манипулятор робота, действующий в угловой системе координат и предназначенный для циклически повторяющихся действий. Манипулятор состоит из двух вращающихся звеньев: «плеча» и «локтя», которые закреплены на основании. Основание может вращаться, что обеспечивает третью степень свободы. Такая конфигурация увеличивает рабочую область манипулятора и минимизирует площадь для его размещения на производстве. Перемещение рабочего органа манипулятора может выполняться, если кинематика обеспечивает его позиционирование по трём декартовым и трём угловым координатам. Для программного управления роботами, в том числе роботами-сварщиками, действующими в угловой системе координат и выполняющими движение рабочего органа по сложной траектории, требуется расчёт угловых координат перемещения рабочего органа двухзвенного шарнирного манипулятора. Система управления роботом должна определять положение инструмента в угловой системе координат, преобразуя его для удобства пользователя в координаты x, y и z декартовой системы координат. Результаты исследования. Получены соотношения угловых и декартовых координат, которые можно использовать для расчёта при программировании системы управления двухзвенным манипулятором промышленного робота и организации обмена информацией между пользователем и системой управления, а также для проверки точности и отладки перемещения рабочего органа промышленного робота с использованием обратной связи. Обсуждение и заключения. Представленные результаты работы могут быть использованы для программного управления роботом-сварщиком, действующим в угловой системе координат и выполняющим сложную траекторию перемещения рабочего органа двухзвенного шарнирного манипулятора (захвата). Манипулятор, действующий в угловой системе координат, можно использовать для контактной точечной сварки при перемещении рабочего органа по сложной траектории с применением позиционной или позиционно-контурной системы управления. Эти системы с помощью технологических команд управляют перемещением рабочего органа по заданной траектории.
Промышленный робот, робот-сварщик, манипулятор, конструктивное звено, привод, перемещение, траектория, программное управление
Короткий адрес: https://sciup.org/142236330
IDR: 142236330 | УДК: 621.865.8(075) | DOI: 10.23947/2687-1653-2022-22-4-346-352
Calculation of angular coordinates for the control system of a two-link industrial robot manipulator
Introduction. One of the tasks of two-link manipulators of industrial robots that move the end-effector along complex trajectories (e.g., robot welder) is associated with the need for careful programming of their movement. For these purposes, manual programming methods or training methods are used. These methods are quite labor-intensive, and they require highly qualified service personnel. A possible solution to the problem of programming the manipulator movements is the simulation of motion with the calculation of angular coordinates. This can help simplify the geometric adaptation of the manipulator in the process of debugging the control program. Therefore, this work aimed at calculating coordinates for programming the control system of a two-link manipulator operating in an angular coordinate system and moving the end-effector along a complex trajectory (e. g., when welding car bodies). Materials and Methods. A two-link robot manipulator designed for cyclically repeating actions in an angular coordinate system was considered. The manipulator consisted of two rotating links: “arm” and “elbow”, which were fixed on the base. The base could rotate, which provided a third degree of freedom. This configuration increased the working area of the manipulator and minimized the area for its placement in production. The movement of the manipulator end-effector could be performed if the kinematics provided its positioning along three Cartesian and three angular coordinates. For software control of robots, including welding robots operating in an angular coordinate system and performing the movement of the end-effector along a complex trajectory, it was required to calculate the angular coordinates of the movement of the end-effector of a two-link articulated manipulator. The robot control system should determine the position of the tool in the angular coordinate system, converting it for user friendliness into x, y and z coordinates of the Cartesian coordinate system. Results. The relations of angular and Cartesian coordinates have been obtained. They can be used for calculating when programming the control system of a two-link manipulator of an industrial robot and organizing the exchange of information between the user and the control system, as well as for checking the accuracy and debugging the movement of the end-effector of an industrial robot through feedback. Discussion and Conclusion. The presented results can be used for software control of a welding robot operating in an angular coordinate system and performing a complex trajectory of the end-effector of a two-link articulated manipulator (gripper). A manipulator operating in an angular coordinate system can be used for contact spot welding when moving the end-effector along a complex trajectory using a positioning or contouring control system. These systems control the movement of the end-effector along a given trajectory with the help of technological commands.
Текст научной статьи Расчёт угловых координат для системы управления двухзвенным манипулятором промышленного робота
УДК 621.865.8(075) Научная статья
Введение . Одной из задач двухзвенных манипуляторов промышленных роботов, выполняющих перемещение рабочего органа по сложным траекториям (например, роботов-сварщиков), является необходимость тщательного программирования их движения. Для этих целей используются методы ручного программирования или методы обучения. Эти методы достаточно трудоёмки и требуют высокой квалификации обслуживающего персонала. Возможным вариантом решения проблемы программирования перемещений манипулятора является моделирование движения с расчётом угловых координат. Это может способствовать упрощению геометрической адаптации манипулятора в процессе отладки управляющей программы. Поэтому целью работы явился расчет координат для программирования системы управления двухзвенным манипулятором, действующим в угловой системе координат и перемещающим рабочий орган по сложной траектории (например, при сварке автомобильных кузовов).
Материалы и методы . Рассмотрен двухзвенный манипулятор робота, действующий в угловой системе координат и предназначенный для циклически повторяющихся действий. Манипулятор состоит из двух вращающихся звеньев: «плеча» и «локтя», которые закреплены на основании. Основание может вращаться, что обеспечивает третью степень свободы. Такая конфигурация увеличивает рабочую область манипулятора и минимизирует площадь для его размещения на производстве. Перемещение рабочего органа манипулятора может выполняться, если кинематика обеспечивает его позиционирование по трём декартовым и трём угловым координатам. Для программного управления роботами, в том числе роботами-сварщиками, действующими в угловой системе координат и выполняющими движение рабочего органа по сложной траектории, требуется расчёт угловых координат перемещения рабочего органа двухзвенного шарнирного манипулятора. Система управления роботом должна определять положение инструмента в угловой системе координат, преобразуя его для удобства пользователя в координаты x, y и z декартовой системы координат.
Результаты исследования. Получены соотношения угловых и декартовых координат, которые можно использовать для расчёта при программировании системы управления двухзвенным манипулятором промышленного робота и организации обмена информацией между пользователем и системой управления, а также для проверки точности и отладки перемещения рабочего органа промышленного робота с использованием обратной связи.
Обсуждение и заключения. Представленные результаты работы могут быть использованы для программного управления роботом-сварщиком, действующим в угловой системе координат и выполняющим сложную траекторию перемещения рабочего органа двухзвенного шарнирного манипулятора (захвата). Манипулятор, действующий в угловой системе координат, можно использовать для контактной точечной сварки при перемещении рабочего органа по сложной траектории с применением позиционной или позиционноконтурной системы управления. Эти системы с помощью технологических команд управляют перемещением рабочего органа по заданной траектории.
Original article Calculation of Angular Coordinates for the Control System of a Two-Link Industrial Robot Manipulator
Sergey P. Glushko о
Introduction. One of the tasks of two-link manipulators of industrial robots that move the end-effector along complex trajectories (e.g., robot welder) is associated with the need for careful programming of their movement. For these purposes, manual programming methods or training methods are used. These methods are quite labor-intensive, and they require highly qualified service personnel. A possible solution to the problem of programming the manipulator movements is the simulation of motion with the calculation of angular coordinates. This can help simplify the geometric adaptation of the manipulator in the process of debugging the control program. Therefore, this work aimed at calculating coordinates for programming the control system of a two-link manipulator operating in an angular coordinate system and moving the end-effector along a complex trajectory (e.g., when welding car bodies).
Materials and Methods . A two-link robot manipulator designed for cyclically repeating actions in an angular coordinate system was considered. The manipulator consisted of two rotating links: “arm” and “elbow”, which were fixed on the base. The base could rotate, which provided a third degree of freedom. This configuration increased the working area of the manipulator and minimized the area for its placement in production. The movement of the manipulator end-effector could be performed if the kinematics provided its positioning along three Cartesian and three angular coordinates. For software control of robots, including welding robots operating in an angular coordinate system and performing the movement of the end-effector along a complex trajectory, it was required to calculate the angular coordinates of the movement of the end-effector of a two-link articulated manipulator. The robot control system should determine the position of the tool in the angular coordinate system, converting it for user friendliness into x, y and z coordinates of the Cartesian coordinate system.
Results . The relations of angular and Cartesian coordinates have been obtained. They can be used for calculating when programming the control system of a two-link manipulator of an industrial robot and organizing the exchange of information between the user and the control system, as well as for checking the accuracy and debugging the movement of the end-effector of an industrial robot through feedback.
Discussion and Conclusion . The presented results can be used for software control of a welding robot operating in an angular coordinate system and performing a complex trajectory of the end-effector of a two-link articulated manipulator (gripper). A manipulator operating in an angular coordinate system can be used for contact spot welding when moving the end-effector along a complex trajectory using a positioning or contouring control system. These systems control the movement of the end-effector along a given trajectory with the help of technological commands.
Машиностроение и машиноведение
Введение. Промышленные роботы используются для автоматизированного управления пространственной ориентацией орудий и объектов труда в различных технологических процессах1 [1–7]. Промышленный робот, как правило, включает манипулятор, имеющий несколько степеней подвижности, и устройство числового программного управления приводами. Манипулятор используется для перемещения захвата или инструмента по заданной траектории в заданные точки технологического пространства2 [1–3].
При разработке программ управления перемещениями захвата или инструмента промышленного робота по сложным траекториям (например, для роботов-сварщиков) используются сложные по организации и техническому оснащению методы обучения.
Для упрощения программирования системы управления двухзвенным манипулятором промышленного робота, перемещающего рабочий орган по сложной траектории (например, при сварке автомобильных кузовов), можно использовать моделирование его перемещений с расчётом угловых координат. Это упростит геометрическую адаптацию манипулятора и процесс разработки и отладки его управляющих программ.
Цель работы — расчёт угловых координат для программирования работы системы управления двухзвенным манипулятором, действующим в угловой системе координат и перемещающим рабочий орган по сложной траектории.
Материалы и методы. На практике используются четыре основных типа манипуляторов, которые действуют в цилиндрической, сферической, прямоугольной или угловой системах координат.
На рис. 1 показана рабочая область манипулятора робота, действующего в угловой системе координат. Манипулятор состоит из двух вращающихся звеньев — «плеча» и «локтя», которые закреплены на основании. Основание может вращаться, что обеспечивает третью степень свободы. Такая конфигурация увеличивает рабочую область манипулятора и минимизирует площадь для его размещения на производстве.
Манипулятор, действующий в угловой системе координат, можно использовать для контактной точечной сварки при перемещении горелки по сложной траектории. Для выполнения контактной точечной сварки чаще всего используются роботы с позиционной или позиционно-контурной системой управления. Эти системы с помощью технологических команд управляют перемещением горелки по заданной траектории при заданной ее ориентации с постоянной скоростью.
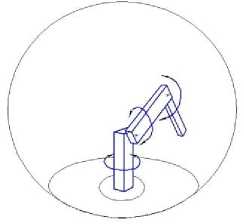
Рис. 1. Рабочая область манипулятора, действующего в угловой системе координат (рисунок автора)
При этом работа подвижных узлов манипулятора в зоне сварки может быть усложнена влиянием выделяемого тепла. Частично эта проблема решается применением водяного охлаждения горелок с автономными устройствами охлаждения. Для полного устранения этой проблемы потребуется дополнительно решить тепловую задачу с моделированием теплового процесса для определения и компенсации температурных расширений, вызванных нагревом электрическим разрядом или электрической дугой [8].
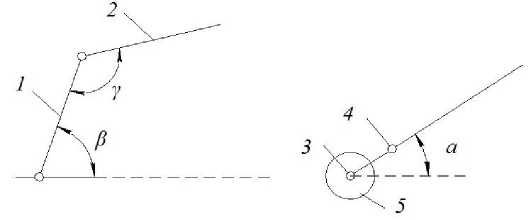
Результаты исследования. Для разработки программы управления роботом, который действует в угловой системе координат (рис. 1), необходимо выполнить расчет угловых координат перемещения рабочего органа манипулятора (захвата) [1–4, 6, 7]. На рис. 2 приведена его схема, состоящая из двух стержней 1 и 2, которые соединены сферическим шарниром 3 и плоским шарниром 4. Вся конструкция устанавливается на основании 5. Стержни манипулятора имеют длину 1 1 и 1 2 . Шарнир 3 может вращаться в горизонтальной плоскости (угол а) и в вертикальной плоскости (угол β). Шарнир 4 вращается в вертикальной плоскости (угол γ).
а ) б )
Рис. 2. Конструкция двухзвенного шарнирного манипулятора: а — главный вид; б — вид сверху (рисунок автора)
На рис. 3 показана схема двухзвенного шарнирного манипулятора в виде полусферы с радиусом R = 1 1 + 1 2 и с вырезанной полусферой с радиусом r, который определяется эмпирически при отладке работы манипулятора.
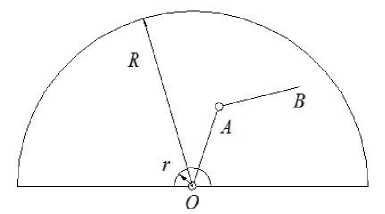
Рис. 3. Схема двухзвенного шарнирного манипулятора (рисунок автора)
Система управления манипулятором должна задавать положение инструмента в угловой системе координат и для удобства пользователя преобразовывать его в параметры декартовой системы координат.
Принимаем основание конструкции (точку О) за начало декартовой системы координат и располагаем её оси как показано на рис. 4.
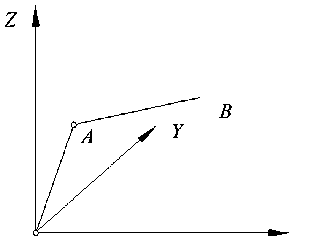
X
Рис. 4. Прямоугольная система координат с центром в точке O (рисунок автора)
Угол α проекции отрезка OB на плоскость XOY показан на рис. 5.
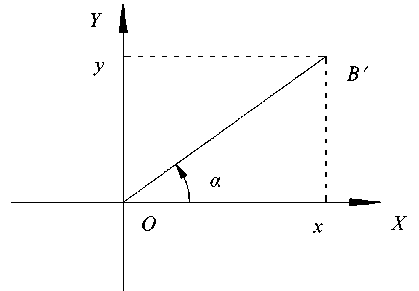
Рис. 5. Определение угла проекции отрезка OB на плоскость XOY (рисунок автора)
Угол α определяем по формуле:
х а = +arccos —р===, где x и y — координаты точки B.
Знак «+» следует ставить, если y будет больше или равно нулю, а знак «–», когда y будет меньше нуля.
Углы на плоскости ZOB @ 1 , @ 2 и у между осями координат и рычагами 1 1 и 1 2 показаны на рис. 6.
Машиностроение и машиноведение
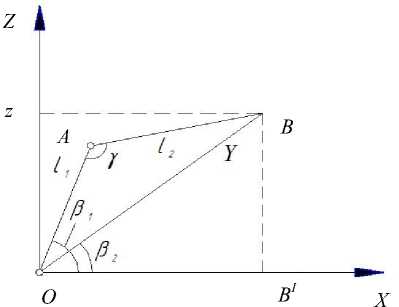
Рис. 6. Определение углов 3 1 , /? 2 и Y (рисунок автора)
Формулы для определения углов 3 1 , /? 2 и у найдём, пользуясь теоремой косинусов:
= arccos
Г [ 2 +z2+x2+y2- ^
2 • 1 1 • ^z2 + х2 + у2 .
^"Чт^+йй
у = arccos
| И + z j
- z2 - х2 - у2
2 • h • I2
где x, y и z — координаты точки B.
Полученные соотношения можно использовать для расчёта угловых координат при разработке программ управления двухзвенным манипулятором промышленного робота, решения задач позиционного или контурнопозиционного управления с применением датчиков обратной связи для непрерывного контроля и корректировки промежуточных точек траектории перемещения манипулятора3 и управления двигателями приводов [5, 6].
Так как динамические системы роботов, в том числе двухзвенных манипуляторов, действующих в угловой системе координат, характеризуются нелинейностями и подвержены возмущениям, то с целью устранения ошибок при воспроизведении траектории перемещения рабочего органа манипулятора предлагаемый расчёт угловых координат может быть дополнен решениями с использованием следующих методов:
-
- нейросетевого моделирования [9];
-
- имитационного исследования системы роботизированной руки для обнаружения и оценки неисправностей [10];
-
- эквивалентного принципа переменной структуры скользящего режима для точного восстановления произвольных нелинейных неисправностей [11];
-
- генетического алгоритма для решения задачи планирования траектории [12];
-
- генерации совместных траекторий для роботизированных манипуляторов с возможностью предотвращения столкновений [13].
Для управления двухзвенным шарнирным манипулятором со сложными траекториями его перемещения перспективно применение адаптивного управления с датчиками обратной связи, сигналы с которых обрабатываются и, по результатам обработки, принимаются решения о дальнейших действиях.
Структура аппаратной части предлагаемой системы управления (рис. 7) включает: приводы звеньев манипулятора, датчики углового положения звеньев манипулятора, датчики температуры узла крепления горелки, программируемый логический контроллер, осуществляющий функции управления манипулятором.
В промышленных роботах используются электрические, гидравлические и пневматические приводы с поступательным и вращательным движением. Наибольшее распространение в робототехнике получил электрический привод, который отличают широкий диапазон мощностей двигателей, удобство в регулировании скорости и удобство в автоматизации процессов управления.
Глушко С. П., Частиков А. П., Корниенко В. Г., Тотухов К. Е. Программная система тестирования и отладки управляющих программ для робототехнического комплекса: свидетельство о государственной регистрации программы для ЭВМ № 2011611987, поступ. 11.01.11 опубл. 04.03.11.
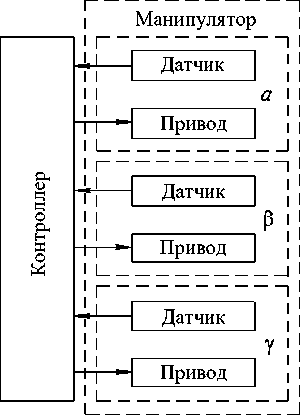
Рис. 7. Структура аппаратной части системы управления многозвенным шарнирным манипулятором (рисунок автора)
Для контроля угловых перемещений в многозвенных шарнирных механизмах манипуляторов с адаптивными системами управления, выполняющими сложные траектории, рекомендуется использовать датчики углового положения — энкодеры. С их помощью можно измерять параметры перемещения инструмента или обрабатываемого объекта, углы их поворота, направление перемещения, скорость вращения вала электродвигателя или редуктора, угловое положение по отношению к нулевой метке, направление вращения.
В адаптивных системах управления можно использовать инкрементальные (инкрементные) и абсолютные энкодеры. Инкрементальные энкодеры отличаются простотой, надежностью и относительно низкой стоимостью. Абсолютные энкодеры сложнее и дороже, но они позволяют определять углы поворота осей звеньев в любой момент времени сразу после включения питания, причём, даже в неподвижном состоянии звеньев. Абсолютные энкодеры также позволяют определять углы поворота осей звеньев при отключении и последующем восстановлении питания и не требуют возврата устройства в начальное положение. При этом на сигналы абсолютных энкодеров не оказывают влияния помехи и вибрации. В последних разработках адаптивных систем управления появились инерциальные датчики [14], имеющие ряд усовершенствований для компенсации ошибок системы управления перемещениями манипулятора.
Обсуждение и заключения. Проведен расчёт угловых координат для программирования работы системы управления двухзвенным манипулятором, действующим в угловой системе координат и перемещающим рабочий орган по сложной траектории. Полученные в работе соотношения угловых и декартовых координат можно использовать для расчёта и контроля угловых перемещений и программирования систем управления двухзвенными манипуляторами промышленных роботов, перемещающих рабочие органы по сложным траекториям.
Расчёт угловых координат для управления двухзвенным манипулятором промышленного робота, представленный в данной работе в виде решения геометрической задачи позиционирования, можно также использовать при моделировании аналогичного манипуляционного устройства или при построении системы управления таким манипулятором и организации обмена информацией между пользователем и системой управления, а также для проверки точности и отладки перемещения рабочего органа промышленного робота с использованием обратной связи.
Список литературы Расчёт угловых координат для системы управления двухзвенным манипулятором промышленного робота
- Горитов, А. Н. Программирование промышленных роботов без остановки производственного цикла / £ А. Н. Горитов // Доклады Томского государственного университета систем управления и радиоэлектроники. — щ 2009. — № 1(19). — Ч. 1. — С. 61-64. |
- Горитов, А. Н. Синтез управляемых механических устройств с применением экспертной системы / ^ А. Н. Горитов, И. В. Колотаев // Доклады Томского государственного университета систем управления и радиоэлектроники. — 2009. — № 1(19). — Ч. 1. — С. 72-76.
- Горитов, А. Н. Сглаживание траектории перемещения рабочего инструмента робота манипулятора / А. Н. Горитов, С. М. Алферов // Известия Томского политехнического университета. — 2006. — Т. 309, № 8. — C. 176—179.
- Горитов, А. Н. Моделирование адаптивных мехатронных систем / А. Н. Горитов, А. М. Кориков. — Томск: В-Спектр, 2007. — 350 с.
- Босинзон, М. А. Автоматизированные мехатронные модули линейных и вращательных перемещении металлообрабатывающих станков / М. А. Босинсон // Приводная техника. — 2002. — № 1. — С. 10-19.
- Букреев, В. Г. Алгоритм планирования траектории движения следящего многокоординатного электропривода / В. Г. Букреев, Н. В. Гусев // Известия высших учебных заведений. Электромеханика. — 2003. — № 3. — С. 16-20.
- Гусев, Н. В. Алгоритмическое обеспечение систем управления следящими электроприводами / Н. В. Гусев // Научно-технический и учебно-образовательный журнал: Известия высших учебных заведений. Электромеханика. — 2006. — №3. — С. 57-60.
- Глушко, С. П. Моделирование теплового процесса центробежной биметаллизации внутренней поверхности втулок / С. П. Глушко, Д. Л. Поправка, Н. С. Абрамов // Сварочное производство. — 2009. — №6. — С. 30-35.
- Uglev, V. A. Automated Education: Tendency for Scientific Approaches Convergence / V. A. Uglev, D. I. Suchinin // In: Proc. 2nd International Conference on Applied Social Science Research (ICASSR2 014). — 2014. — P. 20-23. http://dx.doi.org/10.2991/icassr-14.2014.6
- Xing-Gang Yan. Nonlinear Robust Fault Reconstruction and Estimation Using Sliding Mode Observers / Xing-Gang Yan, Ch. Edwards // Automatica. — 2007. — Vol. 43. — P. 1605-1614. https://doi.org/10.1016/j.automatica.2007.02.008
- Jing He. Fault Reconstruction Based on Sliding Mode Observer for Nonlinear Systems / Jing He, Changfan Zhang // Mathematical Problems in Engineering. — 2012. — Vol. 2012. — Art. 451863. https://doi.org/10.1155/2012/451843
- A Direct Approach to Solving Trajectory Planning Problems Using Genetic Algorithms with Dynamics in Complex Environments / F. J. Abu-Dakka, F. J. Valero, J. L. Suner, V. A. Mata // Robotica. — 2015. — Vol. 33. — P. 669-683. http://dx.doi.org/10.1017/S0263574714000393
- On-Line Path Planning with Collision Avoidance for Coordinate- Controlled Robotic Manipulators / T. Kivela, J. Mattila, J. Puura, S. Launis // In: Proc. ASME/BATH 2017 Symposium on Fluid Power and Motion Control. — 2017. — P. 1-10. http://dx.doi.org/10.1115/FPMC2017-4297
- Titterton, D. H. Strapdown Inertial Navigation Technology, 2nd ed. / D. H. Titterton, J. L. Weston // MPG Books Ltd.: Bodmin, Cornwall, UK; 2004. — 558 p.
