Распознавание пахотных земель на территории Самарской области по спутниковым снимкам для решения задач землепользования

Автор: Баврина А.Ю., Агафонов А.А.
Журнал: Компьютерная оптика @computer-optics
Рубрика: Обработка изображений, распознавание образов
Статья в выпуске: 6 т.49, 2025 года.
Бесплатный доступ
В работе представлена технология распознавания пахотных земель по снимкам дистанционного зондирования Земли для решения задач землепользования на уровне региона РФ. Исследуется применение современных методов глубокого обучения для выделения границ пашни как по одиночным снимкам, так и по серии снимков среднего разрешения Sentinel-2. Согласно исследованиям, наилучшего качества удается достичь с использованием архитектуры UPerNet при выделении мультимасштабных признаков алгоритмом Swin Transformer v2. Рассматривается использование полученного векторного слоя пашни для решения задачи обнаружения незаконной распашки особо охраняемых природных территорий. Работа вносит значимый вклад в повышение эффективности региональных систем управления природными ресурсами, демонстрируя, как использование искусственного интеллекта и снимков дистанционного зондирования помогает автоматизировать решение задач землепользования.
Снимки дистанционного зондирования Земли, пахотные земли, землепользование, особо охраняемые природные территории, глубокие нейронные сети, семантическая сегментация
Короткий адрес: https://sciup.org/140313262
IDR: 140313262 | DOI: 10.18287/2412-6179-CO-1754
Recognition of arable lands on the territory of Samara region using satellite images for solving land use problems
The paper presents a technology for recognizing arable land from remote sensing images to solve land use problems at the regional level of the Russian Federation. The application of modern deep learning methods to identify the arable land boundaries from both single and a series of medium-resolution Sentinel-2 images is being investigated. According to research, the best quality can be achieved using the UPerNet architecture when extracting multiscale features using Swin Transformer v2 algorithm. The resulting vector layer of arable land is used to solve the problem of detecting illegal plowing of specially protected natural areas. The work makes a significant contribution to improving the efficiency of regional natural resource management systems, demonstrating how the use of artificial intelligence and remote sensing images helps to automate the solution of land use problems.
Текст научной статьи Распознавание пахотных земель на территории Самарской области по спутниковым снимкам для решения задач землепользования
В современном мире высокий уровень развития информационных технологий допускает их интеграцию практически во все сферы человеческой деятельности. В частности, принятие решений органами регионального самоуправления должно опираться на данные, которые актуальны, корректны и представлены с достаточной степенью обобщения. Незаменимым помощником здесь является искусственный интеллект, позволяющий извлекать закономерности и связи из большого объема разнородной информации.
Самарская область является одним из лидеров по применению информационных систем в области землепользования в России [1, 2]. Используемые современные геоинформационные системы (ГИС) объединяют множество векторных слоев, справочной информации и снимков дистанционного зондирования, обеспечивают работу с данными для большого количества пользователей, разграничивают права доступа.
Около 75% земель Самарской области составляют земли сельхозназначения. На пахотные земли приходится около 55% площади региона, причем для некоторых муниципальных районов доля площади пашни доходит до 80% (рис. 1). До недавнего времени актуализация информации проводилась преимущественно вручную, однако доступность снимков дистанционного зондирования Земли (ДЗЗ), возможности вычис- лительной техники и современные алгоритмы анализа данных позволяют автоматизировать мониторинг природных объектов.
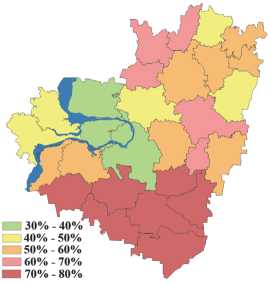
Рис. 1. Процент пахотных земель в районах Самарской области (по данным за 2023 г.)
Определение границ пахотных земель на основе снимков ДЗЗ является важным этапом для решения множества задач сельского хозяйства [3 – 5]. К ним относятся мониторинг состояния посевов, оценка урожайности, планирование севооборотов, выявление неиспользуемых земель и контроль за соблюдением земельного законодательства. Без точного определения границ пахотных земель невозможно эффективно реализовать эти задачи, что делает разработку автоматизированных методов распознавания актуальной.
Большое количество мировых исследований в данной области направлено на применение и адаптацию к специфике задачи новейших нейросетевых методов [6, 7]. Чаще всего применяются сети U-типа (энкодер-декодер) с использованием алгоритмов свёртки, самовнимания. Основой для анализа служат как снимки ДЗЗ среднего разрешения (для полей правильной формы и большой площади), так и высокого и сверхвысокого разрешения (для небольших фермерских хозяйств, полей со сложной геометрией и рельефом). Полученные исследователями результаты свидетельствуют о значительных успехах и демонстрируют большие значения показателей качества распознавания границ пахотных земель [8].
Однако создание единой универсальной системы распознавания сопряжено с рядом сложностей:
-
- необходимость в безоблачных снимках, а лучше в серии безоблачных снимков;
-
- соответствие между размером полей и пространственным разрешением снимков;
-
- существенное различие культур по отражательным характеристикам, текстурным показателям и степени изменчивости в течение сезона вегетации; - отличия на снимках между одной и той же культурой, произрастающей в разных климатических условиях, природных ландшафтах, при разных схемах возделывания сельхозкультур;
-
- схожесть визуальных характеристик сельхозкультур с характеристиками естественных природных объектов на снимках ДЗЗ (лугами, степями);
-
- разнообразие размеров и форм полей (алгоритм не должен быть настроен на какой-то определенный масштаб или определенную форму);
-
- различие характеристик внутри одного поля, вызванное различным состоянием растений;
-
- различный уровень цифровизации регионов, доступности наземных данных для обучения.
В литературе есть примеры попыток создания единой базы размеченных снимков ДЗЗ для обучения алгоритмов распознавания сельскохозяйственных полей по всему миру [9]. Подобные базы могут быть использованы для регионов с недостатком достоверной наземной информации о полях, а также для «грубого» обучения моделей распознавания.
Однако для получения качественных результатов распознавания пахотных земель, очевидно, необходимо учитывать специфику конкретного региона. В данной работе представлен пример рационального применения современных нейросетевых методов внутри технологии автоматического анализа снимков дистанционного зондирования Sentinel-2. Высокий уровень цифровизации Самарской области предоставляет исчерпывающие данные для обучения нейросетевых алгоритмов, а результаты распознавания пашни в векторном виде интегрируются в ГИС и используются для решения задач землепользования.
Наша работа способна внести значимый вклад в автоматизацию и повышение эффективности региональных систем управления ресурсами. Применение хорошо зарекомендовавших себя архитектур глубоких нейронных сетей для решения задач землепользования позволяет оперативно обновлять имеющуюся информацию, исправлять неточности в ней, достигая значений показателей качества, превосходящих экспертные при несопоставимо меньших временных затратах.
Статья организована следующим образом. В первом параграфе дается общее описание предлагаемой технологии распознавания пахотных земель по снимкам ДЗЗ. Во втором параграфе, опираясь на обзор накопленного опыта по решению задачи семантической сегментации спутниковых снимков, производится выбор архитектур сетей глубокого обучения, перспективных для применения к данным Самарской области. Третий параграф посвящен исследованию эффективности выбранных архитектур глубокого обучения с использованием снимков Sentinel-2 для обнаружения пашни. В четвертом разделе описывается обнаружение незаконных распашек особо охраняемой природной территории (ООПТ) в качестве примера использования полученного векторного слоя пахотных земель для решения задач землепользования. Заключительный параграф содержит выводы по работе и направления дальнейших исследований.
1. Технология распознавания пахотных земель по снимкам ДЗЗ
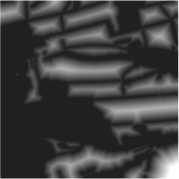
Пашни – это земли сельскохозяйственных угодий, которые ежегодно обрабатываются и используются под посев сельскохозяйственных культур, многолетних трав, огороды и пары [10]. В настоящее время основным достоверным источником получения актуальной информации о границах пашни и состоянии посевов на ней служат снимки дистанционного зондирования Земли. Для мониторинга территории Самарской области как нельзя лучше подходят снимки с космического аппарата Sentinel-2, имеющие среднее пространственное разрешение (10 – 60 метров), большое число спектральных каналов (видимый, ближний и средний инфракрасный диапазон длин волн), высокую частоту съемки территории (раз в 2 – 5 дней) и находящиеся в свободном доступе (рис. 2).
Территория Самарской области расположена на границе лесостепи и степи. Период вегетации сельскохозяйственных растений начинается в апреле и заканчивается в октябре. Распашка, появление всходов, рост и развитие растений, уборка – всё это отслеживается по снимкам дистанционного зондирования. Для успешного решения задач обнаружения культурных видов растительности и анализа её показателей важно иметь в наличии снимки в течение всего периода вегетации. Это делает возможным различение культурных видов растительности от естественной растительности, классификацию культурных видов, мониторинг состояния растений.

Рис. 2. Пашни на снимке Sentinel-2, 12.08.2023, Безенчукский район Самарской области
Основными этапами предлагаемой технологии распознавания пахотных земель по снимкам ДЗЗ явля- ются следующие.
-
- На основании снимков Sentinel-2 (Bottom of Atmosphere) для территории Самарской области составление композитов данных ДЗЗ для пяти месяцев наиболее активного изменения растительности полей Самарской области (май – сентябрь).
-
- Нарезка полного покрытия региона композитами на непересекающиеся фрагменты (тайлы) размером 256×256 отсчетов. Для обучения алгоритма распознавания в границах каждого тайла производится растеризация сельскохозяйственных полей, имеющихся в качестве векторных полигонов. Дополнительно формируются растры границ и расстояний для случая многоцелевого обучения.
-
- Предварительная обработка тайла (контрастирование) для корректной работы алгоритма обучения. Обучение сети выбранной конфигурации на наборе обучающих данных. Применение обученной сети ко всем тайлам для получения бинарного изображения сельскохозяйственных полей.
-
- Выполняется постобработка бинарного изображения для упрощения будущего векторного представления. Векторизация бинарного изображения.
-
- Из данных разных тайлов формируется векторный слой сельскохозяйственных полей.
На основе полученного векторного слоя сельскохозяйственных полей можно решать более частные задачи, а именно:
- распознавание типа культуры;
- оценка биомассы, показателей здоровья растений, степень зарастания сорными растениями;
- контроль за посевными площадями (выявление незаконных распашек, необрабатываемых территорий и т.п.);
- прогноз урожайности;
- планирование с/х работ, в том числе составление оптимального пути обхода роботизированной техникой.
2. Выбор архитектур для исследования
Таким образом, векторный слой пашни, полученный в результате применения предложенной технологии, является основой для решения широкого перечня задач землепользования на уровне региона.
Автоматическое обнаружение сельскохозяйственных полей на снимках дистанционного зондирования Земли привлекало к себе внимание исследователей уже давно, с 1970-х годов, с запуском спутника Landsat [11]. Однако ограничения в виде плохой доступности снимков и низких возможностей вычислительной техники тормозили развитие и широкое применение алгоритмов распознавания. В последнее десятилетие произошел взрывной рост работ в этой области благодаря прогрессу вычислительных ресурсов (по скорости и объему обрабатываемых данных), развитию алгоритмов глубокого обучения, доступности снимков ДЗЗ (в том числе размеченных).
Классические методы, применявшиеся для распознавания пахотных земель, основаны на выделении контуров и на формировании областей [12]. Для методов машинного обучения необходимо указание способа формирования эффективных признаков. Нейросетевые методы способны самостоятельно генерировать эффективные признаки для распознавания. Главным требованием для них является наличие больших вычислительных мощностей и большого объема размеченных данных.
Задача распознавания пахотных земель на цифровых снимках представима как задача семантической сегментации (на два класса: «пашня» и «не пашня»), и ее решение может быть найдено с помощью глубоких нейронных сетей U-типа [13]. Укрупненная архитектура подобной сети состоит из двух частей: «энко-дера» (который выделяет признаки) и «декодера» (восстанавливает карту сегментации из признаков).
В энкодере происходит постепенное понижение линейных размеров карт признаков при одновременном повышении количества этих карт. Формирование признаков происходит на основе блоков свертки (convolution) и (или) блоков самовнимания (selfattention [14]). За изменение линейных размеров отвечают блоки агрегации («пулинга» – MaxPooling, AveragePooling). Повышение эффективности достигается передачей соединений в декодер (skip connection, lateral connection) и использованием остаточных соединений (residual connection [15]). Для эффективного решения задачи сегментации энкодер может возвращать признаковое представление изображения с разными масштабами (результат с разных «глубин» энкодера) [16]. Такое пирамидальное представление позволяет, во-первых, уделять достаточно внимания и мелким деталям, и более общей контекстной информации, а во-вторых, решать сразу несколько задач анализа изображений (например, отнесение всего изображения к какому-либо классу и одновременную сегментацию по различным критериям) [17]. В литературе для обозначения энкодера используют понятие «backbone» (бэк-бон, остов, основа). В этом качестве может использоваться предварительно обученная на большом объеме данных «тяжелая» сеть, а декодер конструируется (и дообучается) под конкретную практическую задачу.
Декодер выполняет постепенное восстановление пространственных размеров признаковых слоев до размера исходного изображения, формируя размеченное изображение. Базовыми блоками декодера являются блок повышения линейных размеров (сверткой, интерполяцией), блок слияния признаков (конкатенация, поэлементное сложение, свертка). Механизмы са-мовнимания могут быть применены и в декодере [18].
Целью дальнейшего рассмотрения работ по распознаванию сельскохозяйственных полей является выделение архитектур, перспективных для применения на территории Самарской области.
Значительное количество исследователей в последние годы сосредоточили свои усилия на распознавании пахотных земель по снимкам высокого и сверхвысокого разрешения. Такое разрешение дает возможность определять границы полей с высокой точностью, в том числе за счет использования текстурных особенностей различный подстилающих поверхностей. Однако ставшие различимыми на снимках (по сравнению со средним разрешением) тени, канавы, ручьи, столбы, тропинки, кустарники, небольшие овраги и т.п. приводят к затруднениям в определении целостных объектов, к появлению разрывов границ и посторонних включений на результатах распознавания.
Преодолению этих трудностей посвящено большое количество работ, предлагающих как простые модификации в виде атриусной свертки [19], блока пирамидального пулинга [20], так и сложные архитектуры, объединяющие преимущества сверточных слоев (локальные признаки) и механизмов самовнимания (глобальные зависимости, контекстные связи) [18, 21, 22]. Отметим также использование многоцелевого обучения, при котором на вход подаются карты областей, границ и расстояний. Получение более качественной сегментации здесь достигается путем оптимизации комбинированного критерия качества [22 – 24].
При решении задачи обнаружения пашни по снимкам среднего разрешения на первый план выходит полноценное использование различий в спектральных каналах, а также при наличии временного ряда снимков, динамики изменения объектов на снимках ДЗЗ в течение сезона вегетации.
Одним из подходов к распознаванию сельскохозяйственных полей по мультивременным снимкам является анализ параметров спектрально-временных профилей растительности [25 – 27]. Эти технологии, хорошо зарекомендовавшие себя при использовании ежедневных снимков MODIS [28], все же сталкиваются с трудностями пропуска данных (недостаточного количества и неравномерного распределения дат снимков внутри сезона) при работе со снимками среднего разрешения [26]. Частично это преодолевалось «обогащением» данных за счет схожих территорий, не перекрытых облачностью.
Успехи исследователей свидетельствуют о том, что технология глубокого обучения является подходящим инструментом для определения границ полей и по снимкам среднего разрешения.
Так, в работе [29] достигается значение OA= 89,28 % при применении R2U-Net для девяти спектральных каналов одного снимка Sentinel-2. Для улучшения прогнозирования границ по снимку с пространственным разрешением 30 м в [30] использовались состязательные сети, позволившие получить OA=92,54 %. В работе [31] сеть ResUNet-a с многоцелевым обучением (области, границы и расстояния) применялась к месячному композиту данных Sentinel-2 и давала значение качества OA=91,69 %. Для повышения точности распознавания пашни авторы применяли обученную сеть к четырем месячным композитам в течение сезона вегетации независимо и усредняли полученные результаты.
В работе [32] предлагается двухпотоковая сеть (поток областей и поток границ) для выделения пахотных земель по обширной серии спутниковых снимков Sentinel-2. В потоке областей выделяются ветки, изучающие спектрально-временные и пространственно-временные зависимости. Авторам удалось достичь значений показателей F 1 = 0,91 и IoU = 0,86.
Интересно отметить, что некоторые исследователи намеренно не маскируют (или заполняют интерполяцией) области облачности и теней на снимках, оставляя применяемой сети семантической сегментации самостоятельно компенсировать отсутствие данных и проверяя её устойчивость [32].
Фокусируясь на специфике настоящей работы по обнаружению пахотных земель для решения задач землепользования на региональном уровне, можно выделить следующие позиции для исследования:
- сети с формированием признаков с помощью сверток и механизма самовнимания;
- использование одного снимка и серии снимков; - использование в качестве энкодера сети, предо-бученной на большом количестве данных;
- использование многоцелевого обучения для повышения качества распознанных объектов.
3. Эффективность распознавания пахотных земель
3.1. Набор данных для проведения исследований
Кроме того, целесообразно рассмотреть технологию UPerNet (Unified Perceptual parsing Network), разработанную для решения сразу нескольких задач понимания сложной сцены [17]. В этой технологии к пирамидальной структуре признаков на выходе FPN (Feature Pyramid Network) присоединяются несколько различных классификаторов, способных выполнять распознавание на разных уровнях обобщения (классификация сцены, обнаружение объектов, сегментация областей). Эта технология чрезвычайно привлекательна для потенциального решения сразу нескольких задач землепользования с минимальными дополнительными вычислениями: выделение пахотных земель, классификация выращиваемых культур, оценка состояния растительности и др.
В настоящей работе использовались снимки с космического аппарата Sentinel-2 за период с мая по сентябрь 2023 г. (2023 год был выбран по причине наличия достаточно большого количества безоблачных снимков). Анализировались спектральные каналы B2, B3, B4 и продукт NDVI (основан на каналах B4 и B8) с пространственным разрешением 10 м. Эти каналы несут основную информацию о растительности, и использование дополнительных каналов не дает существенного улучшения качества распознавания [33].
Многие исследователи отмечали, что эффективность распознавания пахотных земель с использованием снимков ДЗЗ за несколько дат в течение вегетационного периода повышается по сравнению с использованием только одного снимка. При использовании снимков за несколько дат спектральные каналы могут просто пристыковываться друг к другу [34], составлять временной ряд [32], образовывать месячные композиты [35], служить основой для вычисления характеристик спектральных кривых [26, 36].
В нашем исследовании использовался следующий способ формирования мультивременных композитов. Составлялся список всех снимков за выбранный месяц с небольшим процентом облачности, полностью или частично покрывающий территорию Самарской области. Для каждой точки местности каждого спектрального канала композита вычислялось среднее значение (по списку дат) яркости канала в этой точке. В качестве выходного значения композита в текущей точке бралось значение яркости канала снимка, наиболее близкое к среднему значению.
Безоблачные композиты космических снимков большого размера разбивались на тайлы размера 256×256 пикселей. Общее число тайлов – 46306. Весь набор тайлов разделялся на обучающую, валидацион-ную и тестовую выборку в пропорции 0,8/0,1 / 0,1.
Для тайлов обучающей выборки выполнялась аугментация данных: с вероятностью 0,5 выполнялось вертикальное отображение, горизонтальное отображение или поворот изображения на 90 градусов.
Выбор лучшей архитектуры проводился на основании значений критериев: IoU, Accuracy, Precision, Recall, F1 [37].
-
3.2. Семантическая сегментация снимков ДЗЗ
Опираясь на проведенный анализ современных методов распознавания, для исследований были выбраны несколько архитектур. Сеть ResUNet-a [23] была выбрана в качестве инструмента, сочетающего преимущества атриусной свертки, остаточных соединений и пропуска соединений. Обучение в ней производится с использованием комбинированной целевой функции на основе областей, границ и расстояний. Второй выбранной архитектурой стала Swin-UperNet [38], в которой для извлечения признаков используется современный механизм самовнимания Swin Transformer v2 [39], а архитектура UperNet [17] позволяет решать несколько задач понимания сцены. Каждая из этих архитектур исследуется применительно в снимку за одну дату, а также к нескольким композитам.
Ниже приведены характеристики выбранных архитектур:
-
- ResUNet-a-4 – архитектура ResUNet-a, обучена на 4-канальных данных Sentinel-2 (композит за сентябрь 2023), количество параметров для обучения – 56M.
-
- ResUNet-a-20 – архитектура ResUNet-a, обучена на 20-канальных данных Sentinel-2 (5 четырехканальных композитов с мая по сентябрь 2023), количество параметров – 56M.
-
- Swin-3-UPerNet – архитектура Swin-UperNet. Для извлечения мультимасштабных признаков использовалась сеть Swin Transformer v2, обученная на наборе ImageNet для решения задачи классификации [39], соответствующие коэффициенты «замораживаются». Обучение всей архитектуры производилось на 3-канальных данных Sentinel-2 (RGB, композит за сентябрь 2023). Количество параметров для обучения этой конфигурации сети – 37M (232M вместе с «замороженными» параметрами).
-
- Swin-4-UPerNet – Swin Transformer v2 + UPer-Net. Обучение производилось полностью на 4-канальных данных (композит за сентябрь 2023). Использовалась более «лёгкая» версия Swin Transformer v2. Количество параметров – 59M.
-
- Swin-20-UPerNet – Swin Transformer v2 + UPer-Net. Обучение производится полностью на 20-канальных данных (5 четырехканальных композитов с мая по сентябрь 2023). Используется более «лёгкая» версия Swin Transformer v2. Количество параметров – 59M.
В табл. 1 представлены результаты проведенных исследований: значения показателей качества для различных конфигураций (при применении обученных сетей ко всей территории Самарской области).
Наибольшие значения по всем показателям качества сегментации демонстрирует конфигурация «Swin-20-UPerNet», которая и была в результате выбрана для решения задачи обнаружения пахотных земель. Также можно заметить, что использование муль-тивременных снимков дает ощутимое улучшение распознавания (выигрыш от использования 20 каналов по сравнению с четырьмя для «Swin-UPerNet» составил 6% для IoU и 3 % для F1). Использование в качестве энкодера сети, предварительно обученной на универсальном наборе изображений (Swin-3-UPerNet), дает значения показателей качества лишь немногим меньше, чем для сети, обученной на изображениях ДЗЗ (Swin-4-UPerNet). Следовательно, такой вариант с предварительным обучением может быть использован в ситуации ограниченных вычислительных ресурсов.
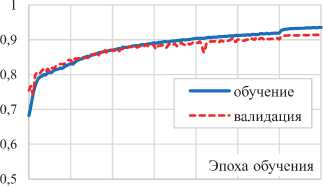
Рис. 3 показывает зависимости функции потерь и критерия IoU от номера эпохи обучения для выбранной конфигурации «Swin-20-UPerNet». Модель успешно обучается и достигает стабильных значений метрик на 140 эпохах.
На рис. 4 приведены данные, предоставляемые алгоритмам обучения: одно из изображений ДЗЗ (в натуральных цветах), карта областей, карта границ и карта расстояний.
На рис. 5 показаны карты областей, являющиеся результатом работы исследуемых алгоритмов распознавания пахотных земель (для тайла на рис. 4). Все алгоритмы показывают приемлемое качество распознавания, наилучший результат демонстрирует алгоритм «Swin-20-UperNet», что согласуется с данными табл. 1.
Более подробно результат работы алгоритма «Swin-20-UperNet» можно оценить с использованием рис . 6. Здесь красным контуром выделены области, соответствующие неактуальным обучающим данным : эти земли не обрабатывались на протяжении последних лет и зарастают деревьями и кустарником, что видно в том числе по рис . 4 а . Алгоритм верно определил отсутствие пахотных земель на этой территории. Оранжевым цветом отмечены границы между смежными полигонами пашни, не выделенные в результате применения алгоритма распознавания. Сложность в принятии решения, нужно ли относить два соседних поля к разным объектам, если между ними нет естественной границы (дороги, полосы из деревьев или кустарника), отмечается, в частности, в работе [32]. При использовании снимков среднего разрешения такая граница просто может быть неразличима. И опора исключительно на разные спектральные характеристики смежных полей может привести к большому количеству ложных границ в пределах одного поля в случае, когда сельхозработы выполняются поэтапно, в разные дни.
Табл. 1. Значения показателей качества для рассматриваемых конфигураций сети
|
Архитектура |
Precision |
Recall |
Accuracy |
IoU |
F 1 |
|
ResUNet-a-4 |
0,858 |
0,927 |
0,889 |
0,803 |
0,890 |
|
ResUNet-a-20 |
0,881 |
0,922 |
0,901 |
0,820 |
0,901 |
|
Swin-3-UPerNet |
0,925 |
0,940 |
0,933 |
0,873 |
0,932 |
|
Swin-4-UPerNet |
0,937 |
0,939 |
0,939 |
0,883 |
0,938 |
|
Swin-20-UPerNet |
0,975 |
0,960 |
0,969 |
0,937 |
0,968 |
а)
Значение функции потерь
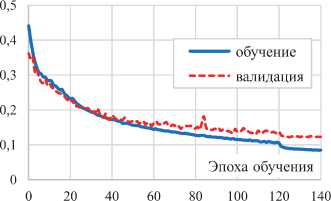
Рис. 3. Графики зависимостей функции потерь и критерия IoU от номера эпохи при обучении для Swin-20-UPerNet
Значение IoU
О 20 40 60 80 100 120 140


в)
Рис. 4. Данные для обучения: (а) снимок Sentinel-2 (композит RGB, 12.08.2023), (б) результат растеризации полигонального слоя пашни, (в) результат растеризации линейного слоя границ пашни, (г) растр расстояний до границ

б)
Рис. 5. Результаты работы алгоритмов распознавания пахотных земель (сегментация пашни): (а) ResUNet-a-4, (б) ResUNet-a-20, (в) Swin-3-UPerNet, (г) Swin-4-UPerNet, (д) Swin-20-UPerNet

Рис. 6. Анализ результата работы алгоритма Swin-20-UperNet. Голубой цвет – векторный слой границ пашни (использовавшийся для обучения), красный – ошибочные границы пашни на обучающем слое, оранжевый – границы обучающего слоя, не обнаруженные алгоритмом распознавания
-
3.3. Постобработка и векторизация
В классических алгоритмах сегментации постобработка была обязательным этапом. Нацеленность на рассмотрение каждого отсчета по отдельности, пусть и с учетом ближайшего окружения, приводила к таким артефактам, как изрезанные края, одиночные отсчеты внутри области, незамкнутые контура. Глубокие нейронные сети, разработанные в последнее десятилетие, включают в свою архитектуру инструменты, позволяющие свести появление этих артефактов к минимуму (многоцелевое обучение, состязательные механизмы, отдельные ветки для обработки контуров).
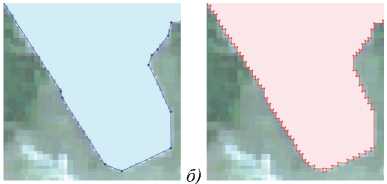
В нашей работе постобработка вызвана необходимостью последующей векторизации. Без постобработки результатов классификации векторизованный объект с границами пашни имеет границы по точкам пикселей растра (рис. 7 б ), т.е. избыточное количество вершин, что затрудняет редактирование объекта в ГИС, увеличивает время выполнения пространственных операций и т.д.
Для устранения указанного недостатка использовался следующий алгоритм постобработки результатов сегментации:
-
1) повышение разрешения бинарного изображения (результирующей карты областей пашни) применением бикубической интерполяции с коэффициентом масштабирования scale ;
-
2) медианная фильтрация с радиусом окна wsize , в результате которой сглаживаются углы;
-
3) повторное повышение разрешения бинарного изображения с коэффициентом масштабирования scale ;
-
4) повторная медианная фильтрация с радиусом окна wsize • scale .
В работе использовались значения scale = 2 и wsize = 1.
Процесс формирования векторного слоя состоял из следующих этапов:
-
1) Создание векторных полигональных объектов по единичным областям результатов сегментации. Для векторизации использовалась библиотека «rasterio» языка программирования Python.
-
2) Упрощение формы полигонов с использованием алгоритма Дугласа–Пекера [40], аппроксимирую-
- щего полигон меньшим числом вершин с заданной погрешностью. Использовалось значение погрешности 10 м, что соответствует пространственному разрешению исходных снимков ДЗЗ.
3) Объединение векторных полигонов отдельных тайлов в общий векторных слой.
4. Применение найденных границ пашни для решения задачи нарушения границ ООПТ
Преимущества использования предобработки показаны на рис. 7 (укрупненный фрагмент тайла с рис. 4). Векторный слой пашни Vini был растеризован для исследования (рис. 7 a ). Слой Vdirect , созданный векторизацией этого растра, будет иметь слишком много вершин (рис. 7 б ). Слой V direct (рис. 7 в ), полученный применением алгоритма Дугласа–Пекера к Vdirect , также содержит избыточное количество вершин. На рис. 7 г показан векторный слой V ˆ post , полученный применением постобработки, векторизации и упрощением формы, как предлагается в настоящей работе. Также для сравнения разных способов векторизации были найдены значения IoU (Intersection over Union) и количество вершин (для исследуемого тайла). Значения показывают, что с использованием постобработки векторный слой ближе к исходному, чем без нее, а количество вершин даже меньше, чем в исходном слое: IoU(VM,V direct ) = 0,990674, IoU(VM,V p0St ) = 0,991545 .
Что касается количества вершин, если принять за 100 % количество вершин в исходном слое Vini , то слой Vdirect содержит 660 % вершин, слой V ˆ direct – 120 % вершин, a слой V ˆ post – 70 %.
Таким образом, использованная в работе схема постобработки и векторизации приводит к формированию векторного слоя с простой геометрией, аппроксимирующего исходный растр с заданной точностью.
Одной из задач, успешно решаемых с помощью снимков ДЗЗ, является контроль за использованием земель. На территории Самарской области расположены 3 ООПТ федерального значения и 211 ООПТ регионального значения [41]. Для каждой территории прописаны разрешенный и запрещенный способ использования земель, однако, к большому сожалению, фиксируются случаи его нарушения. Особенно часто режим землепользования ООПТ нарушается в степных районах, где высока плотность сельскохозяйственных полей.
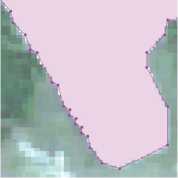
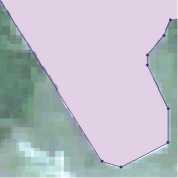
Обнаружение случаев распашки территории ООПТ может производиться на основе векторного слоя пахотных земель, полученного применением описываемой в настоящей работе технологии. Для этого необходимо найти его пересечение со слоем территорий ООПТ и верифицировать полученные области с использованием спутниковых снимков или полевых выездов. На рис. 8 а показан снимок Sentinel-2 (13.05.2023) с территорией ООПТ «Костинские лога», а на рис. 8 б – выявленные нарушения (полигоны розового цвета) – результат пересечения границ ООПТ (красный цвет) и пахотных земель (жёлтый цвет).
а)
в)
Рис. 7. Применение постобработки и векторизации: (а) истинные границы пашни, наложенные на результат их растеризации (истинный растр пашни), (б) истинный растр пашни и результат его векторизации, (в) истинный растр пашни и результат упрощения его векторизации, (г) истинный растр пашни после постобработки и результат упрощения
г)
его векторизации


Рис. 8. Обнаружение незаконной распашки на территории ООПТ: (а) территория ООПТ «Костинские лога», (б) найденные области распашки. Красным цветом обозначены границы ООПТ, жёлтым – границы пахотных земель, розовый полигон – обнаруженная незаконная распашка
Заключение
В настоящей работе представлена технология распознавания пахотных земель на территории Самарской области по снимкам ДЗЗ среднего разрешения с использованием современного аппарата нейронных сетей глубокого обучения. В результате проведенного исследования была выбрана архитектура, сочетающая механизмы са-мовнимания, мультимасштабность признаков и возможность решения нескольких задач понимания сложной сцены. При использовании мультивременных композитов на наборе данных по Самарской области удалось достичь показателей IoU = 0,937 и F 1 = 0,968. Дальнейшая постобработка и векторизация результатов распознавания позволяет получить векторный слой пашни, интеграция которого в ГИС дает возможность решать различные задачи землепользования. В частности, продемонстрировано решение задачи обнаружения незаконных распашек на территории ООПТ с использованием простых операций над векторными объектами.
Дальнейшие исследования могут быть направлены на улучшение работы технологии распознавания пахотных земель (актуализация векторного слоя пашни для обучения, использование большего количества снимков с интерполяцией облачных фрагментов, полноценное использование временной компоненты), а также на исследование возможностей решения других задач землепользования совместно с исходной, что заложено в выбранной архитектуре сети.
Работа выполнена при поддержке гранта РНФ № 23-11-20013.
Авторы благодарят АО «Самара-Информспутник» за предоставленные векторные данные пахотных земель на территории Самарской области [42].
