Распознавание показаний аналоговых приборов на примере авиационных приборов высотно-скоростной группы

Автор: Алексеев А.А., Гришин М.В., Степашкина Е.В.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 1 т.24, 2022 года.
Бесплатный доступ
Статья посвящена рассмотрению вопроса распознавания показаний аналоговых приборов на примере авиационных приборов высотно-скоростной группы. Приводится подробное описание программного обеспечения, способного распознавать показания аналоговых приборов на примере авиационных приборов при их поверке. Дается описание основных функций библиотеки алгоритмов компьютерного зрения, обработки изображений и численных алгоритмов общего назначения с открытым кодом OpenCV, использованных при распознавании показаний приборов. Программное обеспечение разработано на высокоуровневом языке общего назначения Python 3.7.7. Приведены результаты работы программы, показывающие эффективность данного метода поверки авиационных приборов высотно-скоростной группы.
Авиационные аналоговые приборы высотно-скоростной группы, компьютерное зрение, авионика, поверка, распознавание образов, обработка изображений
Короткий адрес: https://sciup.org/148324084
IDR: 148324084 | УДК: 629.7
Analog instrument reading using the example of high-altitude and high-speed flight instruments
The article considers the issue of analog instrument reading using the example of high-altitude and high-speed flight instruments. The article provides a detailed description of the software that can read analog gauge data through the example of flight instruments during their verification. The article describes the main functions of computer vision library, image processing, and general-purpose numerical algorithms with open source (OpenCV), used for instrument readings. The software is developed in the high-level universal programming language Python 3.7.7. The results of the program are presented, showing this method performance of checking high altitude flight instruments.
Текст научной статьи Распознавание показаний аналоговых приборов на примере авиационных приборов высотно-скоростной группы
Несмотря на преобладание цифровых приборов, аналоговые измерители со стрелочной индикацией продолжают достаточно широко использоваться из-за ряда преимуществ [1]. Однако, аналоговые приборы не имеют цифровых интерфейсов, для проведения их поверки используют визуальное считывание показаний. Низкая эффективность и невысокая надежность, обусловленные визуальным считыванием, снижают производительность традиционных систем тестирования и поверки аналоговых приборов со стрелочной индикацией.
Таким образом, технологии компьютерного зрения были использованы для идентификации результатов измерений указателей. Методы компьютерного зрения имеют высокую применимость в данной области, в связи с ростом вычислительной мощности современных компьютеров.
РАСПОЗНАВАНИЕ ПОКАЗАНИЙ
ния. Изображения прибора получены посредством камеры A4Tech PK-910H.
Продемонстрируем возможности ПО на примере распознавания показаний Указателя скорости- 450 (УС-450), представленного на рисунке 1.

Рис. 1. Указатель скорости – 450 (УС-450)
Распознавание показаний реализовано по принципу, указанному на рисунке 2.
ПО разработано на языке Python 3.7.7 [2] с использованием библиотеки алгоритмов компьютерного зрения, обработки изображений и численных алгоритмов общего назначения с открытым кодом OpenCV [3].
К достоинствам программы можно отнести простой и понятный консольный интерфейс (рисунок 3).

Рис. 2. Схема распознавания показаний прибора
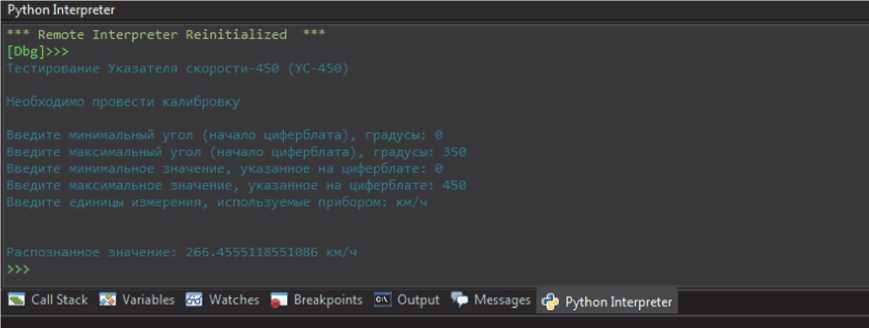
Рис. 3. Пример интерфейса программы

Рис. 4. Пример диалогового окна ввода информации
На первом этапе необходимо провести калибровку ПО. Оператор вводит минимальный и максимальный углы отклонения стрелки от вертикали (рисунок 4).
Далее, оператор сообщает ПО наибольшее и наименьшее значения, изображенные на указателе. После завершения этапа калибровки, ПО генерирует изображение на основе исходного изображения и с использованием указанной оператором информации рисунок 5.

Рис. 5 Результаты калибровки программы тестирования УС-450
Вторым этапом ПО идентифицирует положение стрелки на указателе. Это обеспечивается приведением изображения к оттенкам серого, затем приведенное изображение бинаризирует-ся. Пороговое значение бинаризации было установлено эмпирическим путем, вероятно, для других приборов необходимо подкорректировать это значения. Возможно использование метода Оцу[4] для вычисления порога бинаризации. Результат второго этапа проиллюстрирован на рисунке 6.

Рис. 6 Результаты бинаризации исходного изображения
Следующим шагом является обнаружение стрелки аналогового прибора. Для обнаруже-

Рис. 7 Результат обнаружения стрелки
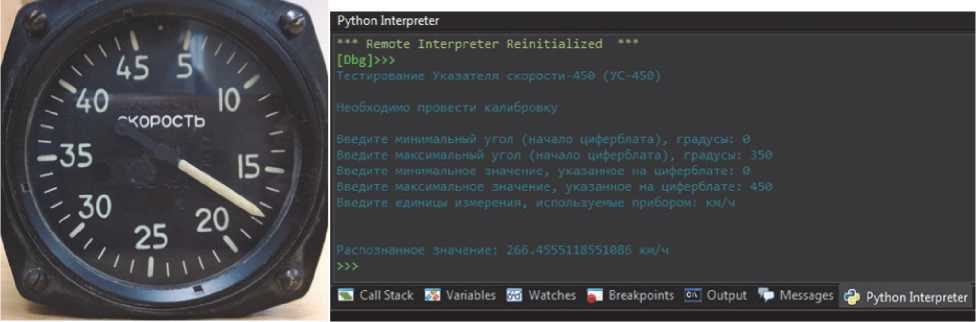
Рис. 8 Пример работы ПО
ния используется преобразование Хафа: функция HoughLinesP(image, rho, theta, threshold) из библиотеки OpenCV, где image – изображение на котором производится поиск, rho- точность шага в пикселях, theta – точность поворота в радианах, threshold – пороговое значение. На рисунке 6 представлен пример нахождения стрелки прибора.
После идентификации стрелки, ПО, с помощью введенных данных на этапе калибровки, определяет угол отклонения стрелки и пересчитывает в показания прибора.
На рис. 8 представлен пример работы ПО.
ВЫВОДЫ
Разработанное ПО дает возможность распознавать только статичные показания. ПО находит применение при проведении проверок контрольных точек. Такой параметр, как «плавность хода» оценивается приблизительно. В целях повышения точности и реализации возможности в полном объеме контролировать плавность хода необходимо модернизировать ПО для возможности работы с сериями изображений, т.е. видеофайлами с необходимой частотой смены кадров.
Список литературы Распознавание показаний аналоговых приборов на примере авиационных приборов высотно-скоростной группы
- Алексеев, А.А. Основные аспекты автоматизации поверки аналоговых авиационных приборов высотно-скоростной группы / А. А. Алексеев // Информатика и вычислительная техника. XI Всероссийская научно-техническая конференция аспирантов, студентов и молодых ученых. - 2019. - С. 6-8.
- Бейдер, Д. Чистый Python. Тонкости программирования для профи / Д. Бейдер. - СПб.: Питер, 2018. - 288 с.
- Bradski G., Kaehler A. Learning OpenCV - computer vision with the OpenCV library / G. Bradski, A. Kaehler - Sebastopol: O'Reilly Media, 2008. - 556 p.
- Фокин, Д.С. Предварительная обработка изображений сцены для выделения искомых объектов/ Д.С. Фокин, С.Н. Карабцев, Т.С. Рейн. - Москва: Технические науки, 2020.
- Zhang, Y. Imagecalibration algorithm based on total least squares method for pointer instruments / Y. Zhang, D. Zhang, C.H. Xu, B. Xie. - Henan: Science and Technology. 2015. - V. 36(5). P.75-79.
