Распознавание состояний излучающей области в реальном времени

Автор: Евсеев Д.Г., Цыпкин Б.С.
Журнал: Компьютерная оптика @computer-optics
Рубрика: Системы реального времени
Статья в выпуске: 3, 1988 года.
Бесплатный доступ
Рассмотрены вопросы приема и обработки волновых процессов в реальном масштабе времени с целью организации обратной связи по управлению экспериментальной установкой и объектом исследований. Описана практическая реализация соответствующих процедур на двухпроцессорном комплексе, аппаратные средства, созданное программное обеспечение. Показано использование комплекса при определении вкладов отдельных источников в общее излучение области и распознавание ее состояний.
Короткий адрес: https://sciup.org/14058150
IDR: 14058150
Текст научной статьи Распознавание состояний излучающей области в реальном времени
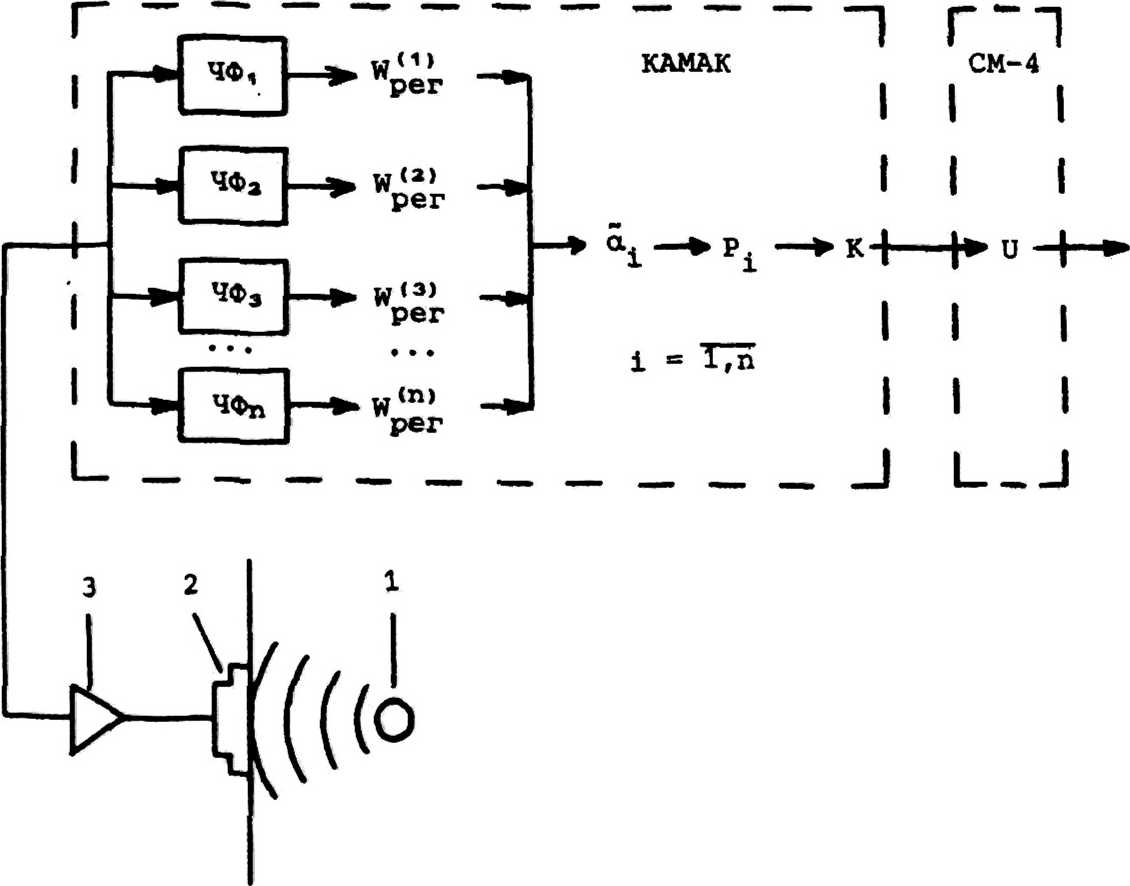
При исследовании волновых процессов желательно иметь возможность управления экспериментальной установкой и объектом исследования непосредственно в ходе эксперимента, в особенности при изучении динамики этих процессов. Обратная связь по управлению экспериментом (рис. 1) позволяет в зависимости от поведения исследуемого объекта поддерживать такие режимы, при которых его особенности выделяются наиболее четко. Для осуществления управления экспериментом прежде всего необходимо, чтобы темп обработки информации превышал темп ее поступления с датчиков (т.е. обработка должна идти в реальном времени). Основная трудность при работе в реальном времени заключается в обеспечении достаточного быстродействия средств регистрации и обработки волновых процессов, при котором время реакции всей цепочки измерение - обработка - управление было бы достаточно мало. Этого можно достичь распараллеливанием процессов сбора и обработки информации и использованием простых (с вычислительной точки зрения), но вместе с тем эффективных алгоритмов анализа.
На базе этих принципов создана автоматизированная система на основе ЭВМ СМ-4 и УСО (устройство сопряжения с объектом) в международном стандарте КАМАК.
”^ обратная связь по управлению односторонняя передача информации двусторонняя передача информации
Рис. 1. Структура автоматизированной системы
В состав ЭВМ входят: процессор СМ 2104 (16 разрядов, длительность операции регистр-регистр 1,2 мкс), оперативное запоминающее устройство ОЗУ (256 Кбайт), 2 накопителя на магнитных дисках НМД (общей емкостью 10 Мбайт), 4 дисплея СМ 7200, 3 графических микропроцессорных принтера Д100, алфавитно-цифровое печатающее устройство с клавиатурой (АЦПУ) СМ 7103, устройство ввода-вывода перфоленты.
С помощью дисплея и принтеров обеспечивается многопользовательский режим работы. СМ 7103 используется для фиксации процесса диалога исследователя с ЭВМ, что дает возможность его последующего анализа и служит в качестве паспорта эксперимента.
В состав функциональных модулей КАМАК включены следующие; контроллер крейта 106а (общее управление модулями); вспомогательный микропроцессор 181А (память 20К RAM, 12 Кбайтов EPROM); два 10-разрядных цифро-аналоговых преобразователя в одном модуле 2ЦАП-10; преобразователь напряжения 058А (248/12В); регистр управления реле РУР-1Р; 5 полупроводниковых оперативных запоминающих устройств 203 (4 Кбайта 24-разрядных слов); 3 постоянных запоминающих устройства 222 (32 Кбайта 24-разрядных слов); таймер реального времени 733 (единица отсчета -1 мс) ; генератор тактовых импульсов 730В (частота от 1 МГц до 1 Гц с декадным делением); 4 аналого-цифровых преобразователя 712 (10 разрядов, время преобразования 25 мкс); блок четырех фильтров (ширина полос пропускания 10 кГц); пере-счетчик время/импульс 1403; индикатор магистрали 081.
Через модули 2ЦАП-Ю и РУР-1Р подключен графопостроитель Н306.
В состав сервисных модулей входят; ручной контроллер 140 (пошаговое, единичное и цикловое выполнение операций); индикатор магистрали 081; генератор тактовых импульсов 730В; генератор - регистр слова 232а (24-разрядное слово); удлинитель 061. Эти модули позволяют проводить контроль и наладку функциональных модулей.
Данный вариант комплекса является основным, так как он обеспечивает решение очень широкого круга я ад ач. При необходимости комплекс может быть легко расширен для решения каких-либо специфических задач. Например, могут быть добавлены полупроводниковые мультиплексоры 752 (по 32 канала) для увеличения числа входных каналов, интерфейс цветного телевизора 560 для расширения возможностей графики и др.
Система содержит ряд функциональных подсистем: моделирование волновых процессов, планирование эксперимента, прием и регистрацию сигналов с датчиков, формирование диагностических признаков, обработку измерительных данных, выработку управляющих воздействий, контроль и тестирование. Каждая подсистема содержит соответствующие аппаратные и программные средства.
Программное обеспечение автоматизированной системы построено на базе операционной системы реального времени ОС РВ, имеющей широкие функциональные возможности: объем оперативного запоминающего устройства до 2048 Кбайт слов, количество поддерживаемых терминалов до 20, встроенная защита файлов, организация резидентных библиотек, диагностика программных и аппаратных средств, системы управления базами данных.
Прикладные программы входят в единый программный комплекс с общими информационно-логическими связями. Комплекс реализует сетевую модель процессов обработки и разработан по оригинальной методике.
Автоматизированная система имеет следующие характеристики:
-
- количество входных каналов до 102;
-
- максимальная частота дискретизации входного сигнала до 170 кГц)*
-
- динамический диапазон 60 дБ;
-
- полоса частот входного сигнала (при использовании видеомагнитофона в качестве промежуточного носителя) до 1,7 МГц;
-
- количество одновременно обрабатываемых наборов данных до 10;
-
- тип данных - байтовые, целые, вещественные;
-
- использование данных многократное при однократном вводе;
-
- операции корректировки данных - сдвиг, перестановка, обнуление, замена на заданное значение по интервалу или диапазону;
-
- оценка наборов данных - по минимальному, среднему, максимальному значению, интерактивный режим взаимодействия пользователя с ЭВМ, основной набор процедур обработки - нормализация, интегрирование, сглаживание, амплитудный, спектральный, кепстральный анализы, распознавание образов;
-
- отображение данных и результатов в целом и по частям;
-
- масштабирование (равномерное, логарифмическое) осей координат, повороты графиков, совмещение, сопоставление и маркировка кривых, построение сечений трехмерных изображений, нанесение обозначений, надписей и т.д.
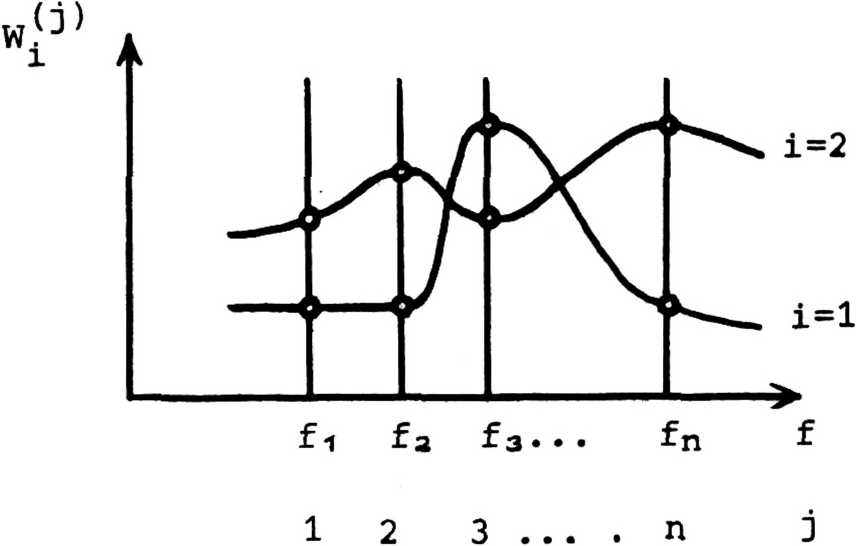
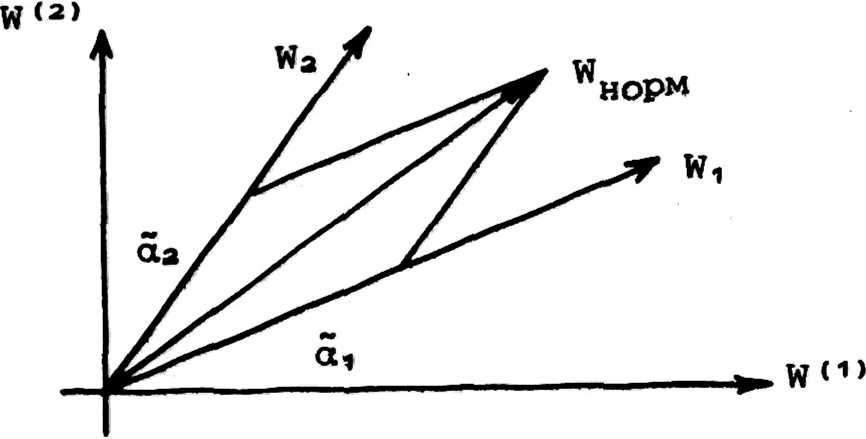
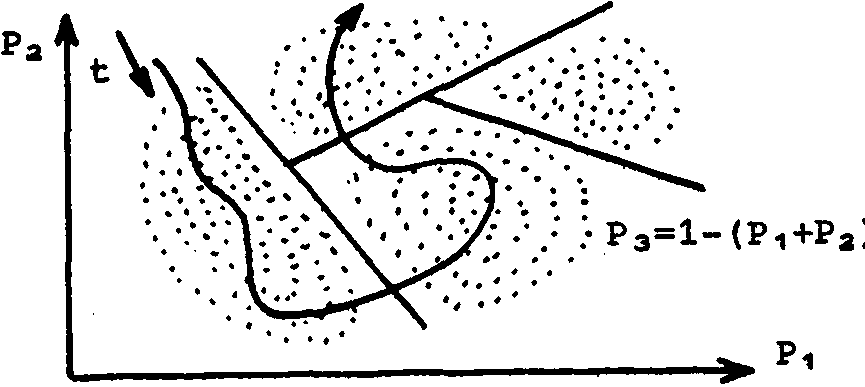
Одна из решаемых задач по анализу волновых процессов имеет следующую постановку. В некоторой области упругой среды, размеры которой малы по сравнению с расстоянием до приемника, находятся источники волн, имеющие различающиеся параметры. Расположенный на поверхности среды приемник в виде пьезодатчика воспринимает результирующую волну и преобразует ее в электрический сигнал. Известны количество источников и спектры излучения каждого источника. Требуется по результирующему излучению определить долю (Р±, i = ТТН, ЕР. = 1) каждого источника, распознать одно из возможных ш состояний излучающей области и рассчитать управ-