Распределение нагрузки в коническом подшипникекачения

Автор: Жильников Евгений Петрович, Пилла Кловис Коие
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 6-3 т.15, 2013 года.
Бесплатный доступ
В работе излагается методика расчёта распределения нагрузки в однорядномконическом подшипнике.В настоящей работе рассматривается подшипники с прямолинейной образующей поверхностей качения роликов и внутреннего кольца. Конические роликовые подшипники работают, как правило, при относительно небольших скоростях вращения. Вместе с тем известны исследования таких подшипников для узлов авиационной техники при высоких скоростях вращения [1, 2].В связи с этим предусматривается расчет подшипника при различных механических характеристиках деталей подшипника. Кроме того учитывается влияние центробежных сил роликов и изменение размеров колец от посадочных натягов.
Подшипники конические, нагрузки, ролики подшипника, деформация, кольцо подшипника, система координат подшипника
Короткий адрес: https://sciup.org/148202612
IDR: 148202612 | УДК: 621.822.6
Load distribution in tapered roller bearings
This paper provides a method of calculating load distribution in single-row tapered roller bearings. In this paper we consider bearings with rectilinear generatrixof rolling surfaces of rollers and inner ring. Tapered roller bearings generally work at relatively low speeds of rotation. However, there are studies with such bearings aircraft bearing assemblies at high speeds. In connection with this we have provided calculation for tapered roller bearings with different mechanical characteristics of bearing components. The influences of centrifugal forces of rollers and changes in dimensions of bearing rings due to interference fit are also taken into account.
Текст научной статьи Распределение нагрузки в коническом подшипникекачения
Распределение нагрузки по роликам определяется с учетом совместности деформаций и перемещений колец. Для расчета перемещений колец примем систему координат, приведенную на рис. 1.
Начало координат совместим с вершиной конуса беговой дорожки внутреннего кольца.
В принятой системе характерные точки торца ролика будут иметь координаты:
Х а = d F /2 1д в и y А = d F /2 - для контакта с внутренним кольцом;
Хв = dp /2tgP — Dw sin Y и У В = dF /2 + Dw cos Y — для контакта с наружным кольцом.
Центр тяжести ролика будет иметь координаты:
х о = D о/2 tg Y и У о = D о/2.
В рабочих условиях при изменении размеров колец вследствие теплового и центробежного расширения, а также деформаций от посадочных натягов координаты характерных точек ролика определятся по формулам:
хАр = dFp /2 tge, У Ар = dFp /2 , хВр = dFp 2 tge - Dwp sin Y,
УВр = dFp /2 + Dwp cos Y, х0р = Dор /2tgY и yор = Dор /2 .
При нагружении подшипника радиальной и осевой нагрузками будет происходить смещение колец. Принимаем, что смещения колец опреде-
ляются как смещения вершины конуса беговой дорожки наружного кольца относительно вершины конуса внутреннего. При изменении размеров колец произойдет относительное смещение вершин конусов внутреннего и наружного колец, как показано на рис. 2.
В принятой системе координат при отсутствии деформации в контактах координаты точки контакта большего торца ролика с наружным кольцом определятся по формулам:
xB = xAp — Dwp sin Y
И У в = dFp /2 + Dwp cos Y .
Величина смещения вершины конуса наружного кольца относительно конуса внутреннего определится выражением:
^ о = х в - Уврд а .
С учетомсмещений колец координаты характерных точек ролика в зависимости от его углового положения будут определяться по формулам:
хАр (i )= dFр /2 tge , У Ар (i )= d Рр /2 , хо р (i ) = Dо р/2 tgY и У о р = Dо р/2 .
Координату точки В на наружном кольце определим как точку пересечения двух прямых:
У = ( x - S a ) • tga - S r cos ( ^ + п ) - для образующей конуса наружного кольца и У = У ар ( i ) - ( x - xAp ( i ^Z tg Y — проходящей через точку A по нормали к оси ролика.
Здесь Sa и Sr – соответственно осевое и радиальное смещения наружного кольца.
Угловая координата i -го ролика определится от линии действия радиальной нагрузки по
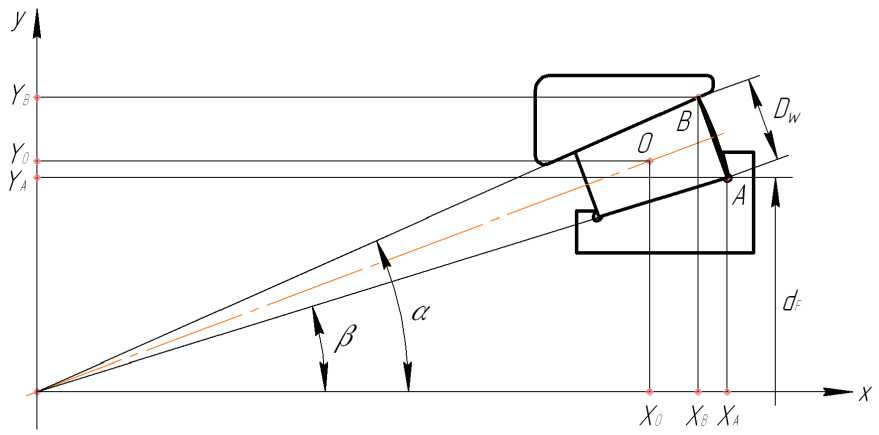
Рис. 1. Начальная система координат подшипника
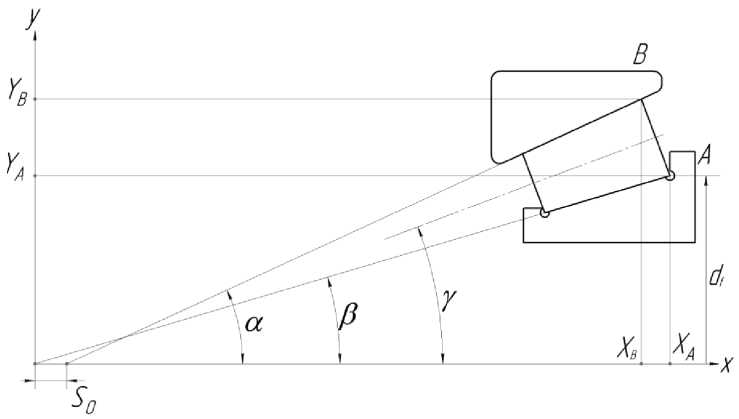
Рис. 2. Начальное смещение колец
формуле ф = 2п ( i - 1 )/ z .
Из решения приведенной системы уравнений найдем координаты точки В :
( x Ap (i )+ ( У Ар (i ) + S a tg a + S r cos ^^gY ) ( 1 + tga- tgy )
х вр ( i )
и У Вр ( i ) = ( x Bp ( i ) — S a У tg a - S r .
Координаты характерных точек определяют положение зоны контакта каждого ролика с бего- выми дорожками внутреннего и наружного колец.
Кроме того, расстояние между точками А и В определяет наличие – отсутствие контакта ролика с внутренним кольцом. При этом, если получим ^(хАр (i) - xBp(i))2 + (Увр (i) - УАр (i))2 > Dwp, отсутствует контакт ролика с внутренним кольцом.
При расчете усилий взаимодействия роликов с бортиком внутреннего кольца принимаем, что точка контакт торцов роликов с бортиком находится в средней части по высоте бортика. Тогда получим координаты точки контакта:
х б ( i ) = х Ар ( i ) - ( d бр - d Fp ) tg Y/ 4
и У бр ( i H d бр + d Fp )/4 .
Под действием гироскопического момента происходит перекос ролика относительно беговой дорожки кольца. В этом случае расчет распределения нагрузки по линии контакта выполняется по аналогии с методикой работы [3].
При известном значении усилия F в контакте, перекосе ψ ролика и координатах начала x 1 и конца x 2 зоны контакта определяется начальное значение деформации в контакте по известной формуле [4]:
5 0 = 8 ■ IO -5 F 0,9 /( ( x 1 - x 2 )/cos a )0,8 — для контакта с наружным кольцом;
5 0 = 8 ■ 10 -5 F 0,9/ ( ( x 1 - x 2 )/cos в ) 0^ — Для контакта с внутренним кольцом.
Линию контакта разбиваем на 20 участков. Длина каждого участка будет равна А х = ( х 1 - х 2)/ 20 .
Координаты центра каждого участка будут равны:
x j = x 1 - А х ■ ( j - 0,5 )
и yj = (xj - Sa) ■ tga - Sr cos ф - для контакта с наружным кольцом, xj = x2 + Ax ■ (j - 0,5) и yj = xj ■ tge - для контакта с внутренним кольцом.
Здесь: Sa и Sr – осевое и радиальное смещения вершины конуса наружного кольца.
Принимая для 1-го участка величину контактной деформации равной δ 0 , величины деформаций для каждого участка с учетом перекоса ролика определятся по формуле:
б х = 5 0 - у • ( х 1 - хj )/ cos у — для контакта с наружным кольцом;
б х = 5 о - у • R Х 2 - х j )/ cos у - для контакта с внутренним кольцом.
При δ х ≤ 0 нагрузка на данном участке принимается q ( j ) = 0.
При положительном значении деформации определение нагрузки для каждого участка определяется методом простой итерации [5].
В качестве начального приближения принимаем q 0 = F /20 . По формулам работы [6] определяем ширину площадки контакта:
b = 2 ^q 0 • пRnp cos а ( n ^A x ) - для контакта с наружным кольцом;
b = 2^ q 0 • q R. cos в Rx -b x ) – для контакта с внутренним кольцом.
Здесь: п = П к + R w . где П ^ = ( 1 - e w )/ E w - для ролика, п к = ( 1 - е „ 2)/ Ев - для внутреннего кольца, п к = ( 1 - е Н )/ Е н - для наружного кольца.
Приведенный радиус кривизны в контакте определится отношением:
R пр = R w R R RR + R w ) — для контакта с внутренним кольцом;
R пр = Rw R R RR - R w ) — для контакта с наружным кольцом.
Радиусы поверхностей роликов и колец в каждом сечении определятся выражениями:
Rw = DWj /2cos а и R = xtga/ cos а — для контакта с наружным кольцом;
Rw = Dw,j (2 cos в и R = х tgP/ cos в — для контакта с внутренним кольцом.
Диаметр ролика в данном сечении определится по формуле:
D w = D wp - 2 ( xAp ( j )- x j ) tg ^ w /cos у — в контакте с внутренним кольцом;
D wj = D wp - 2 ( хвр ( j )- x ) t g Ф w /cos У — в контакте с наружным кольцом.
Здесь ϕ w – угол конуса ролика, определяемый как ф ^ = ( а - в )/ 2 .
После определения ширины площадки контакта находим следующее приближение величины нагрузки:
q ( j ) = ( б х A x П 2cos a)/Rk w + к ) - в контакте с наружным кольцом;
q ( j Ы б х A x П 2cos P )R kw + к ) –в контакте с внутренним кольцом.
При этом: к ад = q w • ln ( 2 R w/ b ) + 0,407 и к = пк • ln ( 2 R/b ) + 0,407.
Если не обеспечивается с заданной точностью условие q (j) « q0, принимаем q0 = q(j) и расчет повторяется. При выполнении заданной точ- ности проверяется условие равновесия:
Z q ( j ) = F .
j = 1
При невыполнении условия равновесия вводится поправка в значение величины δ 0 и расчет повторяется.
После определения нагрузок на каждое сечение вычисляются значения напряжений на каждом участке:
^ Н ( j ) = д/ q ( j ) cos aRn- q • Rnp • A x ) - в контакте с наружным кольцом;
ст6 ( j ) = ^q ( j ) cos pRn • q • R np • A x ) - в контакте с внутренним кольцом.
При неравномерном распределении нагрузки по линии контакта на ролик действует опрокидывающий момент:
20 М = Z ( q ( j ^ l ) . j = 1
Здесь l – эксцентриситет нагрузки в данном сечении относительно центра тяжести ролика.
На рис. 3 приведена схема определения эксцентриситета нагрузки для контакта ролика с наружным (а) и внутренним (б) кольцами.
Линия действия нагрузки в данном сечении описывается уравнением:
x + y ■ tg a - ( x j + y j ■ tg a ) = 0 .
По рекомендациям [7] расстояние от точки О ( х о , У о ) до линии действия нагрузки определится по формуле:
1 н = ( x j - x 0 + ( У, - У 0 )f g a У V 1 + tg a .
Для нагрузки в контакте с внутренним кольцом величина эксцентриситета определится по формуле:
l e = ( x j - x 0 - ( У 0 - У j ^g p У V 1 + tg p .
Координаты центра тяжести находятся из выражений:
x0 =(xAp + xBp У2 - lw0p • cos У и У0 = (Уар + Увр У2 - lw0 p • sin У .
При этом координаты контакта торца ролика с внутренним кольцом xAp и yAp определяются, как показано ранее. Координаты контакта торца ролика с наружным кольцом определяются для каждого ролика по формулам:
= ( xAp + ( У ар + S a tg a + S r cos Ф ) • tgy )
вр ( 1 + tga • tgy ) ;
У Bp = ( xBp - S a ) • tg a - S r cos Ф .
При отсутствии контакта с внутренним кольцом ролик прижимается к наружному кольцу центробежной силой Fc . Величина центробежной силы определяется, как показано ранее. Координаты торца ролика в этом случае показаны на рис. 4.
Значения координат хВр R i ) и У Вр R i ) точки В торца ролика определяются по приведенным выше формулам.
Схема нагрузок на ролик приведена на рис. 5.
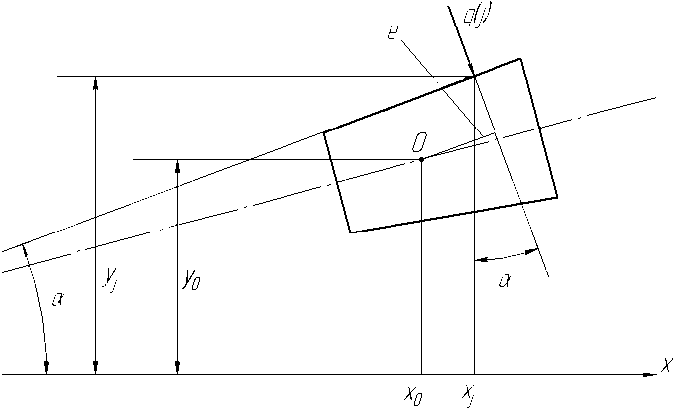
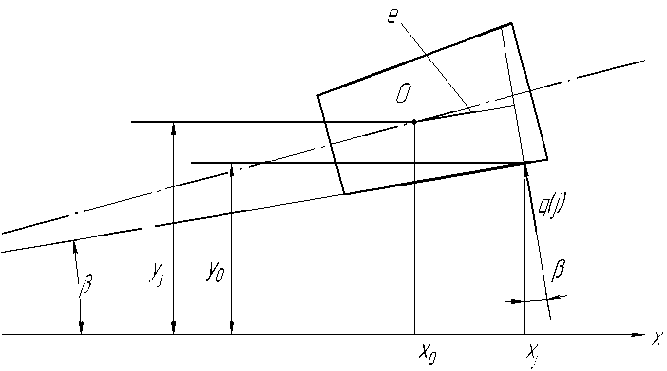
Рис. 3. К определению эксцентриситета действия нагрузки
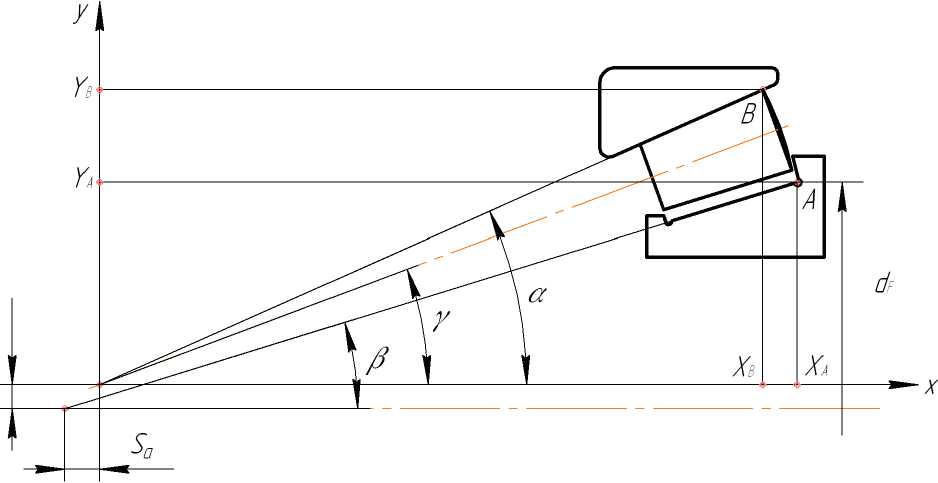
Рис. 4. Координаты торца ролика при отсутствии контакта с внутренним кольцом
Условия силового равновесия показаны на рис. 6. Соотношения сил определяются из выражения:
F6 = Fh = Fc sin a sin (О - в) sin (n - (a + 0 - в)).
Отсюда получим:
F h = F c sin ( 0 - в )/ sin ( a + 0 - в )
и F6 = F c sin a /sin ( a + 0 - в ) .
Условия равновесия ролика под действием моментов, приведенных на рис.3, имеет вид:
£ ( q н ( j )Ц. ) - М г - F 6 i 6 = о .
j = 1
Под действием сил и моментов происходит перекос ролика относительно кольца на угол ψ . Распределение нагрузки qH ( j ) и эксцентриситет ее относительно центра тяжести ролика определяются, как показано ранее. При этом координаты начала и конца рабочего участка линии контакта ролика с наружным кольцом определяют-
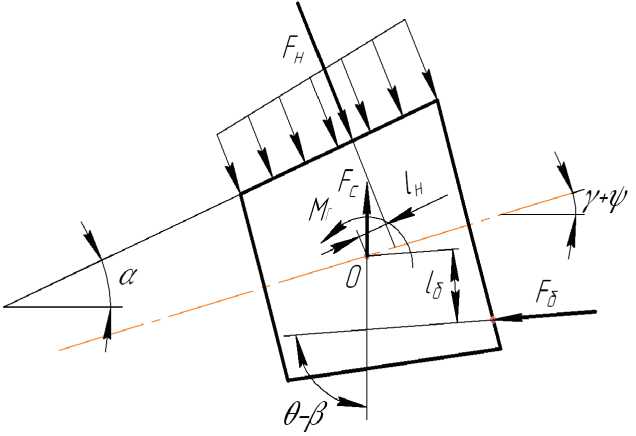
Рис. 5. Нагрузки на ролик при отсутствии контакта с внутренним кольцом
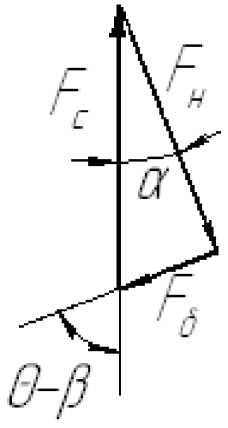
Рис. 6. Схема силового равновесия ролика без контакта с внутренним кольцом
ся по формулам:
X = Х вр ( j ) -А " cos Y и х 2 = х Вр ( j ) — ( l w -A i ) • cos Y .
Здесь Δ и Δ 1 – величины фасок соответственно у большего и меньшего торцов ролика.
Величина гироскопического момента Мг определяется ранее приведенными зависимостями.
Эксцентриситет lб усилия Fб , действующего в контакте с бортиком, определяется по аналогии с ранее приведенными зависимостями по формуле:
, = ( хб - x 0 + ( У 0 - У б 'tg ( 9 - в ) б" VI + tg ( е - в ) .
При этом координаты точки приложения усилия Fб определим приближенно:
х б = х Ар ( j ) - ( d бр - d Fp )( 4tg к 9 - в ))
и У б =( d бр + d Fp )/4 .
Определение угла перекоса ролика и связанного с ним распределения нагрузки по линии контакта определяется из решения с заданной точностью методом хорд [5] уравнения:
После завершения расчетов проверяется отсутствие контакта ролика с внутренним кольцом по условию:
V( х Ар ( i ) - х Вр ( i ) ) 2 +( У вр ( i ) - У Ар ( i ) ) 2 ^ D wp - 5 о .
При невыполнении приведенного условия необходим расчет ролика в нагруженной зоне при наличии контактов с двумя кольцами.
В нагруженной зоне ролик имеет контакты с внутренним и наружным кольцами. Схема кон- такта и координаты характерных точек ролика для этого случая приведены на рис. 7.
Значения координат хАр ( i ) , хВр ( i ) и уАр ( i ) ,
У Вр ( i )
точек А и В торца ролика определяются по приведенным выше формулам.
Схема нагрузок на ролик приведена на рис. 8. Условия силового равновесия показаны на рис. 9.Уравнения равновесия ролика будут иметь вид:
FH sin а - FB sin в- F6 cos ( 9 - в ) = 0 ;
FH cosa - FB cos в + F6 sin ( 9 - в ) = Fc ;
Ф 1 ( г ) - S ( я- ( j ) l н ) - М г - F616 = 0 .
м н - M в + F61 б - M г = 0 .
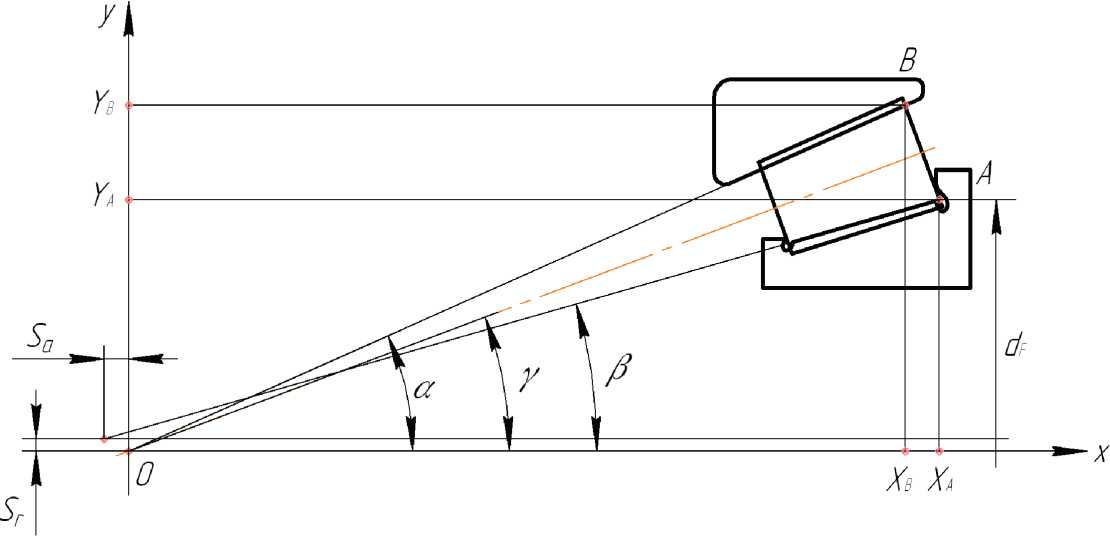
Рис. 7. Координаты торца ролика в нагруженной зоне
Распределение нагрузки по линиям контакта с наружным и внутренним кольцами, а также опрокидывающие моменты Мн и Мв являются функциями угла перекоса ψ ролика относительно колец. Расчеты распределения нагрузки и опрокидывающих моментов выполняются, как показано ранее. При этом координаты начала х 1 и конца х 2 линии контакта ролика с беговой дорожкой наружного кольца определяются, как показано в предыдущем разделе. Координата начала х 1 и конца х 2 линии контакта ролика с беговой дорожкой внутреннего кольца определяются по формулам:
х 1 = х Ар ( j ) - А в • cos Y
И х 2 = х Ар ( j ) — ( lw -Д 1 ) • cos Y .
Здесь: А в = А , если Д > m , или А в = m , если Δ < m , где m - длина выточки у основания упорного бортика.
Приведенная система уравнений не имеет аналитического решения. В связи с этим разделяем ее на две части. При предварительно заданном значении угла перекоса ролика у = 0 усилия в контактах определяются методом итерации. Определяется максимальное значение суммарной деформации в контактах по формуле:
5 = D wp - V( х Ар ( i ) — х Вр ( i ) ) 2 + ( У ВР ( i ) — У АР ( i ) ) 2 .
Принимается начальное значение усилия Fв в контакте с внутренним кольцом. При i = 1 можно принять F . 0 = 4,6 P 0 ( Zz • cos a ) , где z - число роликов, а P 0 – приведенная статическая нагрузка на подшипник, определяемая по [3]. При расчете роликов с i >1 можно принять F . о ( i ) = F . о O' " 1 ) .
Вычисляются:
F ( i ) = ( F . о sin 6 + F sin W - e )) н sin ( 6 - a - в ) ;
F6(i) = (Fh (i)sin a " F.о sin в)/sin (6 - в).
Рассчитываются соответствующие полученным значениям нагрузок распределения нагрузок по линиям контакта, величины опрокидывающих моментов во внутреннем Мв и наружном Мн контактах, а также максимальные значения контактных деформаций δ в и δ н . Если с заданной точностью 5 . + 5 н ~ б ^ , принимается F . ( i ) = F . 0 . В противном случае вводится уточнение F . о = F . о • б , /( б , + б н ) и расчет повторяется.
Определение угла перекоса ролика и связанного с ним распределения нагрузки по линиям контакта ролика с внутренним и наружным кольцами определяется из решения с заданной точностью методом хорд [5] уравнения:
20 20
ф 2 ( у ) - S (q, ( j ) 1 н ) - S ( q . ( j 1. ) - М г - f « i « = ° . j =1 j =1
После завершения расчетов проверяется отсутствие контакта ролика с внутренним кольцом по условию:
V( х Ар ( i ) - х Вр ( i ) ) 2 + ( У вр ( i ) - У Ар ( i ) ) 2 ^ D wp - б н .
При выполнении приведенного условия необходим расчет ролика при отсутствии контакта с внутренним кольцом.
Под действием нагрузок происходит смещение наружного кольца относительно внутреннего. Под осевым Sa и радиальным Sr смещениями понимаем отклонения вершины конуса беговой дорожки наружного кольца относительно вершины конуса беговой дорожки внутреннего кольца.
При изменении размеров колец произойдет вследствие теплового и центробежного расширения относительное смещение вершин конусов внутреннего и наружного колец. Величину начального относительного смещения S 0 опреде-
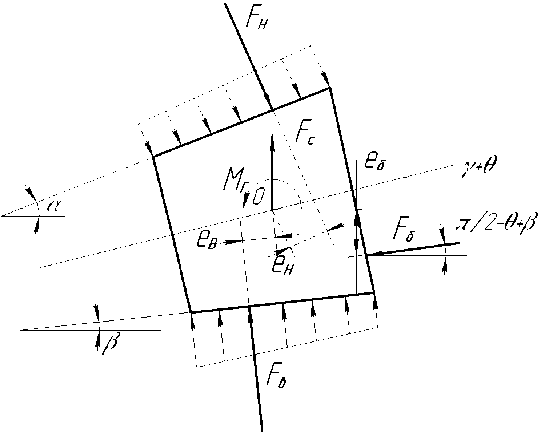
Рис. 8. Нагрузки на ролик при контакте с внутренним и наружным кольцами
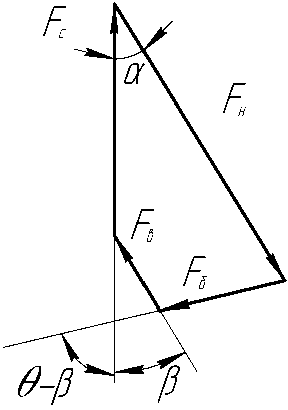
Рис. 9. Схема силового равновесия ролика при контакте с внутренним и наружным кольцами
лим, как показано ранее.
Величины смещений определяются условиями равновесия наружного кольца:
z
Ф а ( S a , S r ) - F a — S ( F . ( < >Ь « ) ;
= 1
z
и Ф r (Sa , Sr ) - Fr -S (Fh (i )cosacos Ф) .
i = 1
Решение приведенной системы уравнений выполняется методом Ньютона [4]. При этом частные производные функций Фа (Sa,Sr) и Ф, (S„, S„) по S„ и S заменяем отношениями ra r a r приращений.
Усилия в контактах роликов с наружным кольцом при заданных величинах смещений Sa и Sr определяются, как показано в предыдущих разделах.
На базе изложенной методики расчета разработана компьютерная программа, с помощью которой проведен пример расчета однорядного конического подшипника 6-7821К1, установленного в опоре главного редуктора.
Условия работы подшипника:
-
- радиальная нагрузка Fr = 18,05 кН;
-
- осевая нагрузка F a = 29,2 кН;
-
- частота вращения внутреннего кольца n = 4000об/мин;
Динамическая грузоподъёмность подшипника [8] С = 303,8 кН, статическая С0 = 434,3 кН. Габаритными размерами подшипника: внутренний диаметр d = 105 мм; наружный диаметр D = 180 мм; монтажная высота т = 49 мм.Ши-рина наружного кольца С = 39 мм, угол конуса беговой дорожки a = 14045', минимальный диаметр беговой дорожки DE = 148,634мм.Ширина внутреннего кольца B = 46 мм, угол конуса беговой дорожки в = 11015', диаметр беговой дорожки у упорного бортика dF = 130,6 мм, диаметр упорного бортика d6 = 142,8 мм, ширина упорного бортика а = 7 мм.
Упорный бортик подшипника выполнен в виде сферы, радиус которой по чертежу R6 0 = 320 мм. При указанных выше размерах бортика получим S = 0,558° и 0 = 89°27'.Бортик у наружного диаметра имеет фаску А Т = 0,8 мм и выточку у основания высотой А F = 1,5 мм и длиной m = 2,7 мм.Бортик меньшего размера имеет наружный диаметр d б 1 = 121,5 мм.
Подшипник имеет 20 роликов номинальным диаметром D w = 19,55 мм и длиной l w = 35,5 мм. Больший торец ролика выполнен сферическим с радиусом сферы R w 0 = 320 мм. На торце имеется отверстие диаметром dom = 10,4 мм и глубиной 1 от = 1,5 мм. Меньший торец ролика имеет диаметр D w 1 = 17,387 мм. У торцов роликов имеются радиусные фаски. Величины фасок А = А 1 = 1 мм.
Результаты расчета приведены на рис. 10.
В связи с увеличением центробежной силы роликов усилия в контактах с внутренним кольцом становится меньше, чем с наружным, как видно по графикам.
Список литературы Распределение нагрузки в коническом подшипникекачения
- Подшипники роликовые конические однорядные, двухрядные, четырехрядные. Расчёт и проектирование Руководящий конструкторский документ РКД ЗАП.003-11. -Самара: изд. ЦСКБ ЕПК, 2011. -120 с., ил.
- Лю Дж. Ю. Анализ роликовых подшипников с коническими роликами с учетом высоких скоростей и комбинированного нагружения.-JORNAL OF LUBRICATION TECHNOLOGY, TRANS. ASMЕ, Series F, №4, 1976, p.87-99.
- Профилирование рабочих поверхностей цилиндрических роликоподшипников при перекосах колец: Отчет по НИР/Завод авиационных подшипников. -Руководитель темы Жильников Е.П. -Самара, 2008. -42 с., ил.
- Перель Л.Я. Подшипники качения: Расчет, проектирование и обслуживание опор: Справочник. -М.: Машиностроение, 1983. -543 с., ил.
- Гутер Р.С., Овчинский Б.В. Элементы численного анализа и математической обработки результатов опыта. -М.: Наука, 1970. -432 с., ил.
- Гусев В.А., Мордкович А.Г. Математика: Справочные материалы. -М.: Просвещение, 1988. -416 с.: ил.
- Г. Корн, Т. Корн. Справочник по математике для научных работников и инженеров. -М.: Наука, 1970. -720 с., ил.
- Каталог 2009. ЕПК, Дивизион специальных подшипников. -Самара: изд. ОАО ЗАП, 2009. -52 с.
- Harris T.A. Rolling Bearing Analysis. -New York, -468 p.
