Распределенная система управления легких космических аппаратов, построенная на базе технологий " система на кристалле" и SpaceWire

Автор: Тюнягин Денис Вячеславович
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 2 (23), 2009 года.
Бесплатный доступ
Предложена организация отработки на мини- и микро-КА бортовой системы управления, построенной на новых принципах, которые позволят легко реконфигурировать данную систему, значительно уменьшить размеры и массу системы управления, а в последующем применять удачные решения в проектировании больших космических аппаратов (КА), а также перейти на новый уровень в проектировании бортовых систем КА.
Распределенная система управления, технология spacewire, технология "система на кристалле"
Короткий адрес: https://sciup.org/148175882
IDR: 148175882
Distributed control system constructed on the basis of technologies "system on crystal" and SpaceWire
It is offered to organize optimization on mini- and micro-satellite onboard control systems, constructed on new principles which will allow easily to reconfigurate the given system, considerably to reduce sizes and weight of the control system, further to apply successful solutions in designing large satellites, and also to go on a new level in designing onboard systems of satellite.
Текст научной статьи Распределенная система управления легких космических аппаратов, построенная на базе технологий " система на кристалле" и SpaceWire
На современном этапе развития космической техники заказчики КА требуют, чтобы на вновь разрабатываемые спутники устанавливалась бортовая аппаратура, прошедшая летную квалификацию. Для выполнения данного требования предлагается отрабатывать перспективные решения на мини- и микроспутниках, которые выполняют, как правило, научные задачи и задачи дистанционного зондирования Земли.
Период между проектированием и штатной эксплуатацией мини- и микроспутников значительно меньше, чем у больших космических аппаратов, т. е. технологии, которые закладывают при их проектировании, на момент изготовления еще не успевают морально и технически устареть, поэтому применение современных и принципиально новых технических решений в проектировании мини- и микро-КА позволяет с минимальным экономическим риском проводить отработку и летную квалификацию данных решений в космическом пространстве с последующим внедрением этих технологий на большие КА.
Не секрет, что на многих отечественных космических аппаратах бортовая аппаратура отстает от современных технических решений. Хотя данная аппаратура отработана и зарекомендовала свою высокую надежность, для дальнейшего развития отечественного космического приборостроения необходимо внедрять и отрабатывать перспективные технические решения.
Предлагается спроектировать бортовую систему управления (БСУ) КА на следующих базовых принципах: 1) структура БСУ должна быть иметь распределенную архитектуру управления; 2) коммуникационной средой должна выступать специализированная высокоскоростная сеть – SpaceWire; 3) аппаратная интеграция БСУ должна быть реализована с помощью технологии «система на кристалле»; 4) спроектированная БСУ должна иметь большой срок активного существования в условиях открытого космического пространства. Рассмотрим эти четыре решения более подробно.
Первое решение. Подход к организации и архитектуре автоматизированных систем управления КА сложился в НПО ПМ еще в конце 1970-х гг. В основе подхода лежит гибкая двухсегментная схема, состоящая из наземного и бортового сегментов управления, с динамическим перераспределением функций и задач между сегментами на различных этапах функционирования КА. Автоматические системы управления КА, реализующие данный подход с развитым по функциональным возможностям бортовым сегментом управления, созданы НПО ПМ и успешно эксплуатируются более 20 лет в различных космических программах. Отличительной особенностью таких систем являются высокие показатели по надежности, автономности и живучести.
В процессе реализации этого подхода были определены требования к функциональным и архитектурным характеристикам бортового сегмента управления. Для бортового комплекса управления (БКУ) был выбран централизованный принцип управления и контроля оборудования, систем КА и космического аппарата в целом. В качестве примера можно привести БКУ «Контур» на базе бортовой цифровой вычислительной машины (БЦВМ) «Салют-4», который был разработан и прошел полный объем наземной экспериментальной отработки и квалификации. Летная эксплуатация БКУ «Контур» началась в 1982 г. в составе КА «Гейзер». БКУ «Контур» и его модификации успешно эксплуатируются на орбите в составе различных КА до настоящего времени, их суммарный срок работы на орбите составляет более 100 лет.
Однако наравне с перечисленными достоинствами, у данного БКУ имеется и ряд существенных недостатков. Использование централизованной структуры БКУ требует установки центральной вычислительной машины (ЦВМ) большой производительности и высокой надежности и, как правило, обладающей большой массой, габаритами, высоким энергопотреблением и тепловыделением. Централизованная архитектура БКУ не позволяет проводить гибкую модернизацию как отдельных функциональных узлов БКУ, так и всего БКУ в целом. Другим недостатком централизованной архитектуры является то, что вычислительные процессы обрабатываются центральным процессором последовательно, т. е. существует определенная временная задержка, прежде чем какая-либо служебная система КА получит управляющее воздействие от ЦВМ. Для минимизации данного эффекта можно установить более мощный центральный процессор либо распараллелить вычислительные процессы.
Переход от централизованной архитектуры управления КА к распределенной архитектуре позволит распараллелить вычислительные процессы, т. е. делегировать значительную часть функций с центрального процессора на микроконтроллеры служебных систем КА. Данный подход позволит организовать функционирование слу- жебных систем в полуавтономном режиме, под общим управлением центрального процессора, повысив таким образом надежность и живучесть всей системы управления КА. Другим достоинством распределенной архитектуры бортовой системы управления является возможность относительно легко и быстро создавать и изменять систему управления КА. Построение бортовой системы управления КА на базе распределенной архитектуры позволит получить ряд преимуществ по сравнению с централизованной архитектурой:
-
– значительное упрощение модернизации отдельных функциональных модулей;
-
– совместимость с оборудованием, произведенным другими предприятиями, включая зарубежные;
-
– возможность создания гибкой наращиваемой сетевой структуры, ориентированной на любые индивидуальные требования заказчика, реализация которой осуществляется с минимальными затратами в части разработки аппаратной части;
-
– сокращение бортовой кабельной сети, а также снижение электромагнитного воздействия и, как следствие, повышение устойчивости к отказам и сбоям;
-
– оптимизация и исключение избыточности аппаратного состава бортовой системы управления;
-
– разгрузка центрального процессора (ЦП) КА и, соответственно, упрощение как самого ЦП, так и бортового программного обеспечения, а также, что немаловажно, закономерное снижение материальных и временных затрат.
Второе решение . В настоящее время космические аппараты, производимые в ОАО «ИСС», оснащаются интерфейсами (в основном МОК и MIL-STD-1553В), возможности которых еще позволяют применять их на современных КА, однако не позволяют перейти к проектированию КА с межсистемным обменом данных со скоростью свыше 1Мбит/с.
Интерфейс МОК впервые начал использоваться в НПО ПМ на КА, оснащенных БЦВМ «Салют-4», и зарекомендовал себя как надежный и простой в реализации интерфейс. Интерфейс обеспечивает соединение «точка–точка», однако последние реализации данного интерфейса обеспечивают линейную топологию с увеличенным количеством абонентов до 4. К недостаткам интерфейса можно отнести отсутствие его стандартизации, отсутствие интегральных схем, реализующих данный протокол, низкую скорость передачи данных, а также большое количество соединительных проводов.
MIL-STD-1553В – - это детерминированная надежная шина передачи данных, предназначенная для подключения датчиков и контроллеров реального времени к вычислительным модулям ответственных систем. Линейная топология 1553 идеально подходит для подключения распределенных устройств, находящихся на борту космического аппарата. По сравнению с двухточечными соединениями, шина характеризуется меньшей длиной соединительных кабелей, что приводит к снижению общего веса и экономии пространства. Кроме того, простота подключения и отключения узлов из сети облегчает обслуживание.
Благодаря сдвоенности шины протокол 1553 обеспечивает отказоустойчивость и автоматическое переклю- чение на дополнительные каналы, «прозрачное» для программного обеспечения ответственной системы. Вместе с тем шина идеально подходит для соединения интеллектуальных вычислительных модулей с распределенными интеллектуальными подчиненными устройствами. Возможно, самой привлекательной характеристикой шины 1553 является ее протокол команд (откликов), который гарантирует предсказуемость ее работы в условиях реального времени. Следует также заметить, что данный стандарт поддерживается значительным количеством разработчиков бортового оборудования как в России, так и во всем мире. В настоящее время шина 1553 является основным интерфейсом передачи данных между оборудованием и бортовым компьютером в разработках ОАО «ИСС».
Несмотря на все привлекательные стороны шины MIL-STD-1553, которые способствовали ее широкой популярности, применение этой шины в более требовательных системах сдерживается довольно низкой скоростью (1 Мбит/с) и последовательной передачей данных. Хотя такая скорость вполне достаточна для выполнения традиционных функций (например, управление оборудованием, получение телеметрической информации), ее не хватает для передачи видео- и других данных между интеллектуальными узлами современных распределенных космических электронных систем. Основным ограничивающим фактором применения данной шины в архитектуре перспективных КА является ее линейная топология, которая не позволяет строить распределенные вычислительные сети реального времени и гибко управлять потоками и маршрутами данных в резервированных системах [1].
Следующим этапом развития межсистемного обмена в космическом приборостроении является применение на КА специализированного единого интерфейса на основе стандарта SpaceWire. Разработка технологии SpaceWire базировалась на трех стандартах: IEEE 1355-1995, TIA/EIA-644 и IEEE Standard 1596.3-1996. Взяв за основу эти три стандарта, адаптировав их для аэрокосмических применений и добавив недостающие для космических свойств характеристики, разработчики (головной исполнитель – - Европейский центр космических исследований и технологий (ESTEC) Европейского космического агентства (ESA)) сформировали стандарт SpaceWire.
Технология SpaceWire предназначена для создания коммуникационных сетей на борту летательного аппарата или КА и отвечает последним требованиям аэрокосмических систем в области коммуникаций. Одной из основных целей стандарта является обеспечение совместимости с различными видами оборудования и многофункциональное использование конечных элементов и подсистем. Процессорные устройства, модули массовой памяти, аппаратные телеметрические системы, разработанные для решения одной задачи, без труда могут использоваться для решения другой, тем самым сокращая стоимость системы, увеличивая ее надежность и производительность. Сеть SpaceWire способна заменить множество отдельных разнородных сетей (обычно сейчас на КА используется 3–5 сетей) на борту космического аппарата, создав единую коммуникационную инфраструктуру на базе единых технических и программных средств.
Этот стандарт использует высокоскоростные (2–400 Мбит/с) дуплексные каналы передачи данных, отвечающие требованиям повышенной надежности, независимости от аппаратуры приема-передачи данных и другим аэрокосмическим требованиям. В проекте находится канал, позволяющий передавать данные на скоростях до 1Гбит/с. SpaceWire представляет единую коммуникационную инфраструктуру датчиков, процессоров сигналов, процессоров данных, модулей массивной памяти, подсистем аппаратной телеметрии и другого электронного оборудования, применяемого на борту аэрокосмических аппаратов [2].
Высокие скорости каналов SpaceWire открывают новые возможности для системного проектирования БСУ. Во-первых, высокая пропускная способность каналов необходима для сопряжения с сенсорами, формирующими высокоскоростные информационные потоки. Посредством каналов SpaceWire датчики, распределенные по объекту, можно напрямую подключать к бортовому вычислительному модулю. Один канал SpaceWire позволяет передать информационный поток до 40 Мбайт/с на расстояние до десятка метров.
Интерфейс SpaceWire позволяет не только доставлять к центральному вычислительному ресурсу множественные потоки информации, но и по тем же каналам управлять работой датчиков – настраивать режимы и параметры функционирования, запускать тестирование, диагностику и т. п. С помощью механизмов распространения кодов времени SpaceWire можно синхронизировать работу датчиков в реальном масштабе времени с точностью до долей микросекунд – синхронизировать их таймеры, синхронно снимать информацию по единому сигналу управления и т. п. Коммутаторы SpaceWire позволяют распределять и реконфигурировать информационные потоки между датчиками и несколькими потребителями, например, между несколькими подсистемами обработки сигналов разного функционального назначения.
По этим причинам технологию SpaceWire активно применяют в своих разработках национальные космические агентства Европейского союза (ESA), США (NASA), Японии (JAXA) и Канады (CSA). Перечень космических аппаратов, где применяется технология SpaceWire, приведен в табл. 1.
Для примера комбинированной схемы сопряжения датчиков с бортовым вычислительным комплексом можно привести архитектуру бортовой системы управления космического аппарата Mercury Planetary Observer (MPO) для международного проекта Bepi-Colombo по исследо- ванию Меркурия. Скоростные потоки данных от научных приборов к компьютеру обработки данных полезной нагрузки передаются по каналам SpaceWire, а каналы от менее скоростных источников мультиплексируются коммутатором SpaceWire [3–5].
В сети SpaceWire используется так называемая червячная маршрутизация, относящаяся к категории методов коммутации «на лету», т. е. при поступлении заголовка пакета во входной порт маршрутизатора пакет сразу маршрутизируется (выбирается направление его дальнейшей передачи, т. е. выходной порт), и начинается сквозная передача потока символов пакета в выходной порт без промежуточной буферизации и хранения в маршрутизаторе. Таким образом, в сетевом узле происходит и маршрутизация входящего пакета, и его коммутация. Подобный режим коммутации пакетов называют маршрутизирующей коммутацией, а маршрутизатор – маршрутизирующим коммутатором. Этот метод обеспечивает малые задержки прохождения пакета через маршрутизатор, обусловленные только временем приема заголовка пакета (как правило, одного символа). Кроме того, в коммутаторе становится ненужной буферная память пакетов, что существенно снижает аппаратные затраты и энергопотребление при его реализации в сверхбольшой интегральной схеме.
На основе стандарта SpaceWire можно унифицировать бортовые приборы и системы космических аппаратов, что обеспечит переход к перспективным интегрированным приборам с открытой архитектурой.
Третье решение . Одним из главных недостатков отечественного приборостроения (в том числе космического) является использование устаревшей методологии проектирования, т. е. применяется классическая система на печатной плате, которая собирается из готовых электронных компонентов (транзисторов, резисторов, специализированных микросхем и др.).
Современная полупроводниковая технология позволяет реализовать на одном кристалле устройства, ранее размещавшиеся на нескольких печатных платах и (или) стойках. Эти возможности дали начало следующему этапу развития электронной техники. Предлагается перейти к новой методологии проектирования бортовой аппаратуры КА, т. е. использовать программируемые логические интегральные схемы (ПЛИС), которые представляют собой цифровые интегральные микросхемы, состоящие из логических блоков (Intellectual Property блоки, или IP-блоки) и программируемых соединителей между этими блоками. Сложность таких ПЛИС может достигать де-
Таблица 1
Примеры применения SpaceWire в зарубежных КА и проектах
|
Космическое агентство |
Космический аппарат (проект) |
Область применения SpaceWire |
|
ESA |
Bepi-Colombo MPO Mercury Оbservation |
Коммуникации между центральным компьютером платформы, вычислительным комплексом полезной нагрузки и 11-ю приборами |
|
NASA |
Swift |
Связь высокоскор остных датчиков с основным блоком обработки данных (16 каналов SpaceWire) |
|
JAXA |
Mercury Magnetospheric Orbiter (MMO) |
Сеть SpaceWire для связи с полем датчиков (sensor electronics) для передачи команд и телеметрии в бортовом приборном комплексе |
|
CSA |
Robotic Arm |
Сопряжение вычислительных (управляющих блоков) распределенной системы управления движением робота-манипулятора |
сятков и сотен миллионов транзисторов. Одна ПЛИС способна заменить целую систему обработки информации, так как в большинстве используемых бортовых систем информация присутствует как в цифровом, так и в аналоговом виде. Например, съем телеметрической информации в КА производится как в аналоговом виде, так и в цифровом [6].
Системы проектирования ПЛИС класса «система на кристалле» уже получили эффективные инструменты логического и физического синтеза и верификации проектов с субмикронными проектными нормами 0,25...0,09 мкм и менее, чтобы обеспечить достаточно короткий цикл проектирования.
IP-блоки разрабатываются целенаправленно или в рамках какого-либо проекта. IP-блоки – это по сути математические модели (топология, список цепей, RTL-код) функционально законченных блоков и узлов системы на кристалле. Принципиальная особенность IP-блоков заключается в возможности их повторного использования в других проектах. Процесс создания систем на кристалле подразумевает решение следующих задач:
-
– разработку IP-блоков;
-
– конструирование системы на кристалле на системно-функциональном уровне из IP-блоков;
-
– интеграцию всех IP-блоков на кристалле [7].
Существенные преимущества перехода к технологии «система на кристалле» очевидны. Она позволяет резко сократить массогабаритные характеристики бортовой аппаратуры КА, так как устройства, созданные на базе технологии «система на кристалле», состоят из одной (максимум двух) ПЛИС-микросхем. Сокращается энергопотребление и повышается производительность бортовой аппаратуры КА за счет существенной миниатюризации, и что немаловажно, повышается надежность всей бортовой аппаратуры в целом, так как значительно сокращается число паяных соединений на печатной плате. Повторное использование разработанных ранее IP-блоков в проектировании других систем значительно сокращает как временные, так и материальные затраты.
Другим существенным достоинством программируемых интегральных схем является возможность их многократного перепрограммирования как на земле, так и на орбите. Для примера можно рассмотреть следующие ситуации. Во время наземных испытаний любая неисправность БСУ может быть легко и быстро устранена путем перепрограммирования ПЛИС-микросхем, тогда как в случае реализации устройств БСУ на печатных платах, трудоемкость изменений была бы более существенной. Другая ситуация: если во время функционирования КА на орбите выявляется конструкторская недоработка или неисправность и необходимо произвести изменения в электрической структуре бортовой системы управления, то при использовании ПЛИС-микросхем есть возможность сделать такие изменения, тогда как при использовании технологии «система на печатной плате» такой возможности нет.
Четвертое решение. Исторически сложилось так, что отечественные КА имеют герметичную конструкцию, т. е. практически вся электронная начинка КА размещается внутри гермоконтейнера. У данного подхода есть один большой недостаток – слишком большая масса КА, что в условиях дороговизны вывода на орбиту делает отечественные космические аппараты неконкурентными. Данная особенность нашего спутникостроения обусловлена тем, что отечественная промышленность была не в состоянии выпускать радиоэлектронные компоненты, устойчивые к воздействиям космического пространства. Сейчас, когда на отечественном рынке появились производители радиационно стойких электронных компонентов, у разработчиков КА появилась возможность перейти от проектирования герметичных КА к негерметичным.
Главным требованием, выдвигаемым к ПЛИС космического применения, являются окружающие условия, в которых она будет находиться, т. е. это устойчивость к космическим излучениям – галактическому, солнечному и радиационному поясу заряженных частиц Земли. При разработке таких ПЛИС должны учитываться два важнейших фактора: эффекты, вызванные общей накопленной дозой, и эффекты одиночных сбоев. Основными производителями ПЛИС космического применения являются компании Aeroflex и Actel. Существуют два вида популярных ПЛИС для использования в космосе – это ПЛИС на основе ячеек статической памяти и ПЛИС с программируемыми элементами типа antifuse. Первый вид обладает такими достоинствами, как наибольшая логическая емкость и перепрограммируемость, и недостатками – потенциальной неустойчивостью конфигурации памяти к одиночным сбоям в результате радиационного воздействия. Достоинство второго вида ПЛИС состоит в том, что потенциально радиационно стойкие antifuse-перемычки делают ПЛИС более стойкой по сравнению с ПЛИС на основе статической памяти, а недостатки этого вида – сложная технология по организации программирования и прожигания перемычек ПЛИС, кроме того цена ПЛИС с antifuse-перемычками намного выше, чем ПЛИС на основе статических ячеек памяти. Для низкоорбитальных КА подойдет первый тип ПЛИС, так как на данной высоте минимально космическое излучение, тогда как второй тип ПЛИС подойдет для высокоорбитальных и геостационарных КА, где космическое излучение более существенно [8–10].
Возможность реализации интерфейса SpaceWire на ПЛИС открывает широкие возможности в интеграции всей бортовой аппаратуры на базе ПЛИС-технологий, т. е. на основе системы на кристалле. Бортовая система управления космического аппарата, реализованная на 1–2 микросхемах высокой интеграции, позволит в десятки раз уменьшить массогабаритные и, как следствие, энергетические характеристики бортовой аппаратуры КА. Это, в свою очередь, позволит использовать освободившиеся ресурсы для целевой аппаратуры КА, повысив, таким образом, техническую и экономическую эффективность КА в целом.
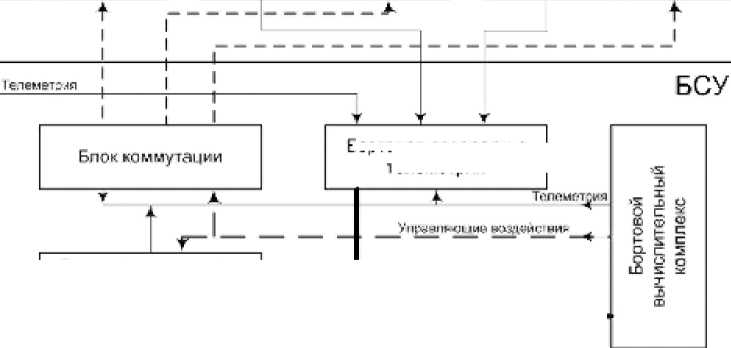
Упрощенные схемы бортовых систем управления КА представлены на рис. 1, 2. Организующим ядром всей системы управления является бортовой вычислительный комплекс (рис. 1). Коммуникационной средой, помимо магистральной шины MIL-STD-1553B, выступает интерфейс сопряжения телеметрической аппаратуры с датчиками, а также интерфейс сопряжения исполнитель- ных устройств с командно-измерительной системой (КИС).
Вычислительные ресурсы системы управления распределены, т. е. перенесены с процессора на микроконтроллеры соответствующих систем КА (рис. 2); коммуникационной средой выступает сеть SpaceWire, а бортовая аппаратура БСУ интегрирована на основе ПЛИС-микро-схем (ПЛИС-микросхема представлена серым прямоугольником).
В ходе проработки конкретной конфигурации БСУ рассматривались существующие отечественные и зарубежные разработки. В качестве процессора целесообразно использовать стойкий к воздействию радиации 32-разрядный процессор AT697 архитектуры SPARC (V8), предназначенный для космических применений. Он был разработан при поддержке Европейского космического агентства и выпущен корпорацией Atmel. Формирователь телеметрии и контроллер SpaceWire можно реализовать на основе сигнального
|
Система электропитании |
|
|
Да 1ч ики |
Исполнител ЬНЫЙ устройства |
|
Система ориентации |
|
|
Датчики |
Ислолнител-ьные устройства |
|
Система терморегул ирэвания |
|
|
Датчики |
Ислолнител- ЬНЫА устройства |
Ml 15ЙЗР
Боридная нппнрн1урн командноизмерительной системы
Ьортозая аппаратура телеметрии
Передатчик
Приемник
Полезная нагрузка
Рис. 1. Централизованная архитектура бортовой системы управления КА
Система электропитания
Система ориентации
Система терморегулирования
Датчики

Исполнительные устройстна
Датчики
Исполнительные устройства
Датчики
Исполнительные устройства
БСУ
Контроллер СЭП
Контроллер СОС
Контроллер СТР
Формировал ель ТМ
Spacewire
Массовая память
Процессор
Кэитзслпер командно-я steepen hi now in системы
Контроллер Spacewire
Передатчик
Приемник
Полезная нагрузка
Рис. 2. Предпологаемая архитектура распределенной бортовой системы управления КА процессора МС-24 (1892ВМ2Я) серии «Мультикор» разработки НПЦ «Элвис», оснащенного двумя контроллерами SpaceWire. Они обеспечивают обмен данными по дуплексным каналам SpaceWire (2 канала) со скоростью 2–400 Мбит/с в канале (в каждую сторону) [3]. Массовая память может быть выполнена как линейки памяти, выпущенные компа-ниейAEROFLEX RadHard Memories UT8R128K32 SRAM [11]. Контроллеры соответствующих систем могут быть реализованы на базе периферийного контроллера МСТ-01 (1892ВД1Я), разработанного компанией- НПЦ «Элвис» [3].
Примерные параметры, которые имеются у существующих бортовых систем управления КА и ориентировочные параметры предлагаемой системы управления представлены в табл. 2. Реализация предлагаемых решений позволит значительно улучшить основные характеристики бортовой системы управления, а также перейти на новый уровень в проектировании КА.
Так как предлагаемые решения являются в основном теоретическими и еще не в достаточной мере отработаны в отечественном спутникостроении, то для более детальной проработки и изучения необходимо внедрять данные решения поэтапно на мини- и микро-КА.
Таким образом, на основании всего вышесказанного можно сделать вывод, что реализация изложенных принципов позволит улучшить и оптимизировать аппаратнопрограммный состав КА, значительно упростить модернизацию бортовой системы управления КА, а также отработать и получить летную квалификацию принципиально новых технических решений на мини- и микроспутниках с последующим внедрением их на большие КА.
