Расширение диапазона двухзонного управления синхронным двигателем с постоянными магнитами

Автор: Давыдов А. Е., Боченков Б. М., Панкрац Ю. В.
Журнал: Вестник Мурманского государственного технического университета @vestnik-mstu
Рубрика: Электротехника. Электротехнические комплексы и системы
Статья в выпуске: 4 т.27, 2024 года.
Бесплатный доступ
Достижение двукратного увеличения скорости вращения синхронного двигателя с постоянными магнитами при сохранении его мощностных характеристик на исходном уровне позволяет повысить производительность и качество обработки материалов на металлорежущих станках. Теоретическое исследование проведено с использованием математической модели синхронного двигателя с постоянными магнитами. Новый алгоритм управления предусматривает две рабочие зоны: зону номинальной скорости, где поддерживаются требуемые мощностные параметры (первую зону), и зону повышенной скорости с увеличением частоты вращения в два раза относительно номинальной (вторую зону). Для оценки эффективности разработанного алгоритма выполнены численное моделирование и сравнительный анализ с традиционными методами управления синхронного двигателя с постоянными магнитами. Полученные результаты продемонстрировали преимущества предложенного подхода, позволяющего обеспечить двукратный рост скорости привода главного движения металлорежущего станка без ухудшения его энергетических характеристик. Данные теоретического исследования подтверждены имитационным моделированием замкнутой системы в программном комплексе SimInTech. Разработанный алгоритм управления может применяться для оптимизации работы электроприводов главного движения на базе синхронного двигателя с постоянными магнитами в составе металлообрабатывающего оборудования.
Металлорежущие станки, синхронный двигатель с постоянными магнитами, математическое моделирование, преобразователь частоты, двухзонное управление, индуктивность, CNC machines, permanent magnet synchronous motor, mathematical modeling, frequency converter, dual-zone control, inductance
Короткий адрес: https://sciup.org/142242759
IDR: 142242759 | УДК: 62-589.1 | DOI: 10.21443/1560-9278-2024-27-4-486-500
Текст статьи Расширение диапазона двухзонного управления синхронным двигателем с постоянными магнитами
*Новосибирский государственный технический университет, г. Новосибирск, Россия; e-mail: , ORCID:
e-mail: , ORCID:
Davydov, A. E. et al. 2024. Extending the range of dual-zone permanent magnet synchronous motor control. Vestnik of MSTU, 27(4), pp. х–х. (In Russ.) DOI: ххх-ххх.
В современной промышленности в качестве приводных узлов используются синхронные двигатели с постоянными магнитами (СДПМ) ( Фираго, 2011; Коваль и др., 2019; Davydov et al., 2022 ). Электронное регулирование СДПМ определяет степень качества обработки деталей и способствует повышению общей производительности станков ( Грубый, 2020; Давыдов и др., 2024; Щагин и др., 2022 ). Наличие двумерного вектора управления СДПМ позволяет, наряду с решением основной задачи формирования желаемого момента, решать дополнительную задачу двухзонного управления. При двухзонном управлении появляется возможность расширения диапазона регулирования СДПМ посредством ослабления потока двигателя, благодаря чему увеличивается скорость вращения ротора. Однако диапазон регулирования во второй зоне ограничен параметрами двигателя (прежде всего индуктивностью), поэтому скорость можно увеличить на 20–30 % ( Коваль и др., 2019; Davydov et al., 2022; Грубый, 2020; Давыдов и др., 2024 ).
Начальный этап решения проблемы расширения диапазона регулирования СДПМ представлен в статьях ( Davydov et al., 2022, 2021; Kotin et al., 2023 ). Данная статья является продолжением исследования, проведенного в работе ( Давыдов и др., 2024 ), где были выполнены первичные расчеты ослабления магнитного потока для синхронных двигателей с постоянными магнитами. В ходе настоящего исследования: 1) рассмотрен метод расширения диапазона регулирования во второй зоне, включающий новый алгоритм управления при внедрении дополнительных индуктивностей в цепь питания СДПМ, что позволило достичь двукратного увеличения диапазона скоростей без ухудшения мощностных характеристик двигателя; 2) проведены численные эксперименты и сравнительный анализ, демонстрирующий эффективность предложенного подхода.
Научная значимость исследования состоит в преодолении ограничений расширения диапазона регулирования скорости, обусловленных конструкцией СДПМ, для чего предлагается рассмотреть возможность введения дополнительного блока индуктивностей в цепь питания статора, способствующего расширению диапазона до удвоения номинальной скорости вращения.
Практическая значимость исследования заключается во внедрении в производство технологии ослабления магнитного потока с использованием дополнительных индуктивностей в электроприводах с СДПМ, что представляет собой перспективное направление развития машиностроения. Оптимизация конструкции СДПМ способствует повышению производительности и эффективности работы фрезерных станков. Проводимые в этой области исследования могут стать основой для создания более точных и высокоэффективных систем фрезерования, что позволит значительно улучшить качество обработанных поверхностей деталей и снизить интенсивность износа режущего инструмента ( Давыдов и др., 2024 ).
Материалы и методы
При проведении моделирования использованы параметры СДПМ, представленные в таблице. Расчеты и имитационное моделирование осуществлены с помощью специализированного программного комплекса SimInTech (ООО "3В Сервис", Россия). Применяемые в данной работе модели СДПМ, а также ПИ-регуляторов системы управления были предварительно выполнены и верифицированы разработчиками этого программного обеспечения.
Таблица. Характеристики синхронного двигателя с постоянными магнитами Table. Characteristics of permanent magnet synchronous motor
|
Характеристика |
Значение |
|
Количество пар полюсов |
2 |
|
Номинальная мощность |
5 500 Вт |
|
Напряжение |
325 В |
|
Номинальная скорость |
1 500 об/мин |
|
Номинальная частота |
50 Гц |
|
КПД |
93,1 % |
|
Номинальный ток |
10,6 A |
|
Номинальный момент |
35 Нм |
|
Максимальный момент (2 мин) |
100 Нм |
|
Коэффициент мощности η |
0,99 |
|
Фазное сопротивление Ω |
0,65 Ом |
|
Индуктивность двигателя |
8,2 мГн |
|
Индуктивность дополнительных обмоток |
16,4 мГн |
График перехода от первой зоны управления, где преобладает максимальный момент, ко второй зоне, где момент снижается, а скорость увеличивается, представлен на рис. 1.
Из графика видно, что для реализации второй зоны управления необходимо ослабить потокосцепление двигателя; в результате этого уменьшается максимальный момент М, Нм, в то время как угловая скорость ω, рад/с, увеличивается. Важно отметить, что при таких изменениях мощность Р, кВт, остается на уровне номинальной.
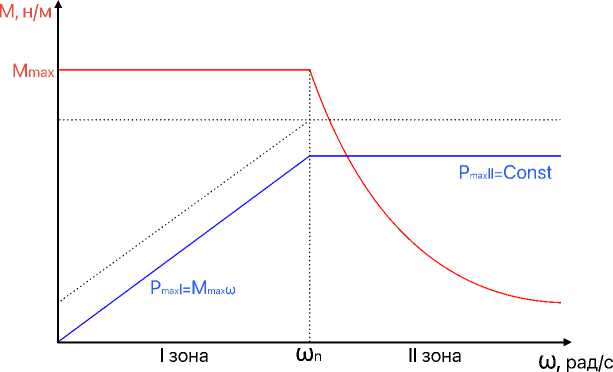
Рис. 1. Схема перехода синхронного двигателя с постоянными магнитами во вторую зону управления Fig. 1. Transition diagram of the permanent magnet synchronous motor to the second control zone
Устройство электропривода главного движения металлорежущего станка (рис. 2) имеет структуру, включающую контроллер управления, инвертор, источник постоянного напряжения и СДПМ. Для расширения диапазона регулирования предлагается добавить блок с дополнительными индуктивностями.
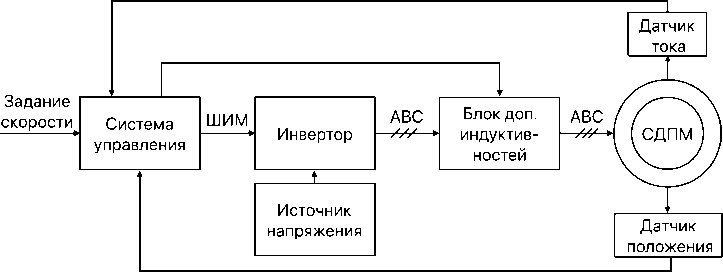
Рис. 2. Структурная схема электропривода Fig. 2. Block diagram of the electric drive
В качестве системы координат выбрана система dq , на основе которой построена структурная схема электропривода (рис. 3).
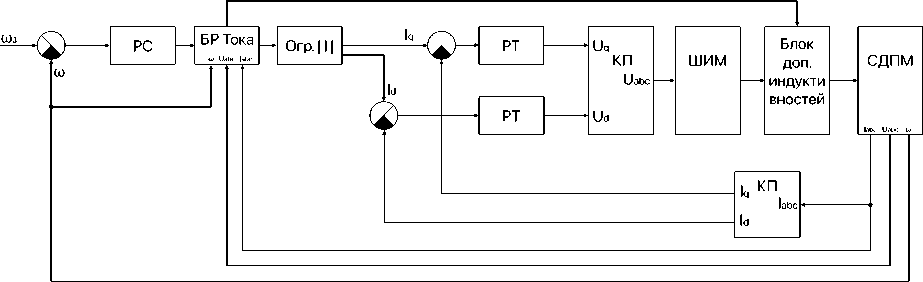
Рис. 3. Блок-схема dq системы управления синхронного двигателя с постоянными магнитами Fig. 3. Block diagram of dq control system permanent magnet synchronous motor
Для перехода во вторую зону управления требуется ослабить магнитный поток двигателя, для чего необходимо увеличить d -составляющую контура регулирования скорости. Это решение позволяет увеличить диапазон скоростей вращения во второй зоне на 33 % по сравнению с номинальной скоростью без ухудшения мощностных характеристик. В отличие от предыдущего исследования ( Давыдов и др., 2024 ), в данной работе внедрены дополнительные индуктивности в цепь питания СДПМ, способствующие расширению диапазона регулирования скоростей во второй зоне. Для моделирования использовано программное обеспечение (ПО) SimInTech, разработанное в России, которое продемонстрировало свою эффективность в предыдущих исследованиях. В рамках работы проведено моделирование различных режимов работы двигателя, что позволило более детально изучить влияние ослабления магнитного потока с дополнительными индуктивностями на его характеристики. Детали диаграммы (рис. 3) следуют в порядке слева направо: настройка желаемой скорости двигателя, обратная связь по скорости, регулирование скорости, блок расчета (БР) тока, ограничение тока по модулю, обратные связи по току q и d , регуляторы тока в координатах dq , координатный преобразователь dq в ABC , блок преобразования ШИМ, блок дополнительных обмоток, СДПМ, координатный преобразователь ABC в dq и итоговая скорость ( Давыдов и др., 2024; Davydov et al., 2021; Костыгов и др., 2014; Li et al., 2012 ). Блок расчета тока, помимо формирования необходимого задания тока Id в первой и второй зоне, выдает сигнал на включение дополнительных обмоток.
Из уравнения равновесия статора ( Давыдов и др., 2024 ) выводится уравнение формирования напряжения СДПМ:
U Sd = ® e L S I Sq ;
USq = ^ f ®e + ®eLSISd , из которого выводится ограничение по напряжению US, описываемое формулой u. = JuL+uT
Формирование тока Id рассчитывается как где LS – индуктивность СДПМ; Iq – ток по оси q; Ψf – потокосцепление ротора; ωe – угловая скорость магнитного поля статора.
При этом ток Iq ограничивается во второй зоне в соответствии с формулой
।= , (4)
где I н – номинальное значение тока.
Передаточная функция Wi = I / U для СДПМ определяется по формуле
W = W pm kWgu Woy , (5)
где W рт – передаточная функция регулятора тока; k – коэффициент преобразователя; W ди – передаточная функция дополнительной индуктивности; W оу – передаточная функция объекта управления.
Математическая модель системы управления СДПМ в координатах dq представлена на рис. 3 ( Carpaneto et al., 2010; Kolano, 2023 ).
Блок расчета тока в первой зоне задает стандартное значение тока Id = 0, что необходимо для формирования максимального момента при работе СДПМ в первой зоне ( Давыдов и др., 2024 ). По математическому описанию была составлена блок-схема системы управления синхронным двигателем с постоянными магнитами в координатах dq (рис. 3) ( Фираго, 2011; Коваль и др., 2019; Грубый, 2020; Zhang et al., 2022; Chau et al., 2008; Lee et al., 2018 ).
На основе математического описания системы построены диаграммы работы СДПМ в первой и второй зонах (рис. 4–8).
Векторная диаграмма (рис. 4) иллюстрирует работу СДПМ в номинальном режиме с номинальной угловой частотой вращения, при котором поперечная составляющая тока ротора Iq равна номинальному току ISn . В этом режиме модуль вектора ЭДС ES , наведенной вращающимся полем статора в обмотке ротора, достигает своего предельного значения ES н. Вектор ES ограничен окружностью радиуса r = ESн , что соответствует максимально допустимому напряжению на статоре.
На векторной диаграмме (рис. 4) также изображены следующие векторные величины и проекции: Eq – проекция вектора ЭДС Es на ось q вращающейся системы координат; LqIq ω – проецируемый на ось q вектор ЭДС реакции якоря, создаваемой током Iq .
Векторная диаграмма (рис. 5) демонстрирует режим работы, при котором угловая скорость ω больше номинальной ωн и вращающий момент M меньше максимального Mmax. В этом режиме вектор ЭДС ES, наведенной в обмотке ротора, сохраняет неизменное значение. Однако вектор результирующей ЭДС Eg увеличивается и превышает номинальное значение ESн.
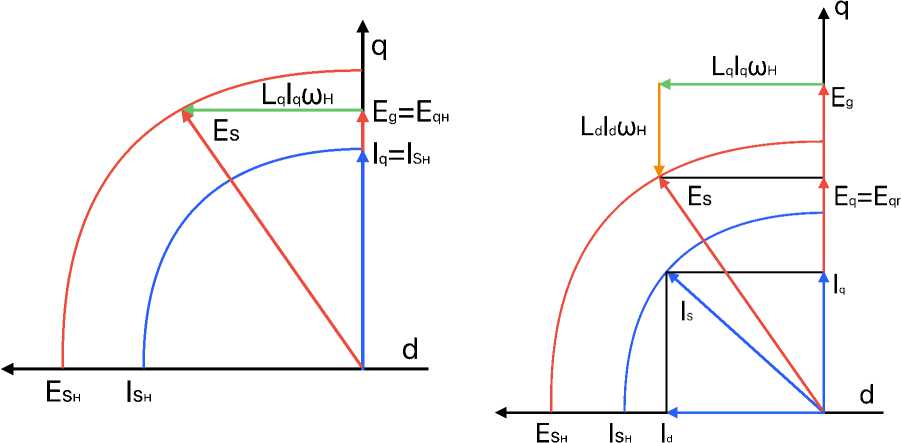
Рис. 4. Диаграмма в первой зоне
Fig. 4. Diagram in the first zone
Рис. 5. Диаграмма во второй зоне
Fig. 5. Diagram in the second zone
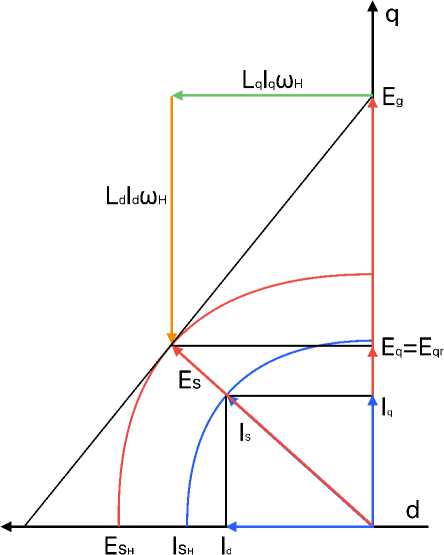
Рис. 6. Диаграмма при расширении диапазона во второй зоне
Fig. 6. Diagram with range expansion in the second zone
В данном режиме в дополнение к поперечному току Iq вводится продольный ток Id по оси d . При этом поперечный ток I q уменьшается так, что вектор L q I q ω остается постоянным и равным L q I S н ω н . Введение тока I d приводит к появлению дополнительной ЭДС реакции якоря L d I d ω по оси d , которая компенсирует увеличение результирующей ЭДС Eg , сохраняя неизменной проекцию Eq .
На диаграмме (рис. 5) также показаны следующие векторные величины: Eqr – номинальная ЭДС по оси q ; E d – ЭДС по оси d ; I S – модуль полного вектора тока статора.
Векторная диаграмма, отражающая режим работы с угловой скоростью ω > ωн и вращающим моментом M < M max, представлена на рис. 6. При данном режиме векторы ЭДС LqIq ω и LdId ω увеличиваются за счет изменения составляющих L q и L d , что позволяет управлять коэффициентом сдвига фаз cos φ между векторами тока и напряжения, доводя его до единицы. Вследствие чего можно увеличить значение результирующей ЭДС E g до 2 раз в соответствии с уравнением (4).
Предложенный алгоритм способствует при ограниченной ЭДС вращения достижению более высоких скоростей вращения ротора за счет создания дополнительного магнитного поля, направленного против постоянных магнитов. В результате ослабления результирующего поля расширяется диапазон регулирования скорости до 33 % с сохранением постоянства мощности.
При ограничении номинального тока изменение векторов L q I q ω и L d I d ω не может происходить за счет изменения тока, поэтому предлагается добавить дополнительные индуктивности в цепь питания СДПМ. При их включении снижается потребляемый ток, необходимый для поддержания скорости, которую двигатель уже развил. В результате чего появляются дополнительный диапазон для увеличения тока до номинального значения СДПМ и возможность увеличить скорость вращения более чем в 2 раза.
Представленная математическая модель предназначена для оценки возможностей управления двигателем, задействованным в приводе главного движения металлорежущего станка, в режиме ослабления поля с расширением диапазона. Анализ работы в данном режиме критически важен, так как регулирование потокосцепления двигателя влияет на коэффициент мощности cos φ. При неизменной полной мощности двигателя этот режим позволяет увеличить скорость вращения ротора еще в несколько раз (по сравнению с классической второй зоной) за счет уменьшения критического момента. Таким образом, данная система управления способствует повышению производительности и точности обработки материалов с помощью металлорежущего станка ( Фираго, 2011; Коваль и др., 2019; Yu et al., 2020; Carpaneto et al., 2010; Kolano, 2023; Zhang et al., 2022; Chau et al., 2008; Lee et al., 2018; Xu et al., 1992 ; Joshi et al., 2022 ).
Результаты и обсуждение
Данная математическая модель применена для расчета увеличения частоты вращения ротора до максимальных 33 % и до 2 раз c использованием дополнительных индуктивностей.
На рис. 7–9 представлены графики моделирования: график скорости (рис. 7), график нагрузки двигателя до номинального значения (рис. 8), график тока в координатах АВС (рис. 9). Графики моделирования подтверждают верификацию измененной модели СДПМ с обновленной структурой управления, включающей модифицированные регуляторы. Данные изменения отличают систему управления от модели, представленной ранее ( Давыдов и др., 2024 ), улучшая ее характеристики устойчивости и точности на высоких скоростях.
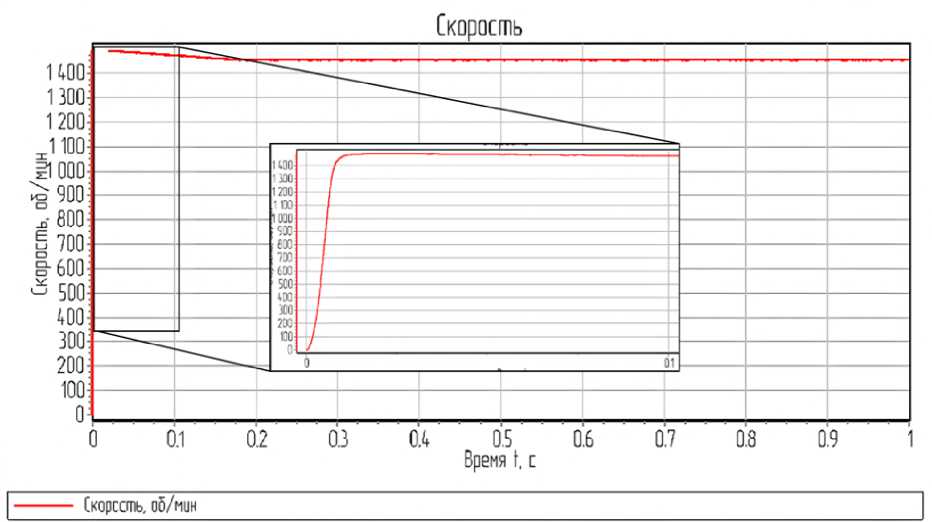
Рис. 7. График скорости СДПМ в номинальном режиме
Fig. 7. PMSM speed graph in the nominal mode
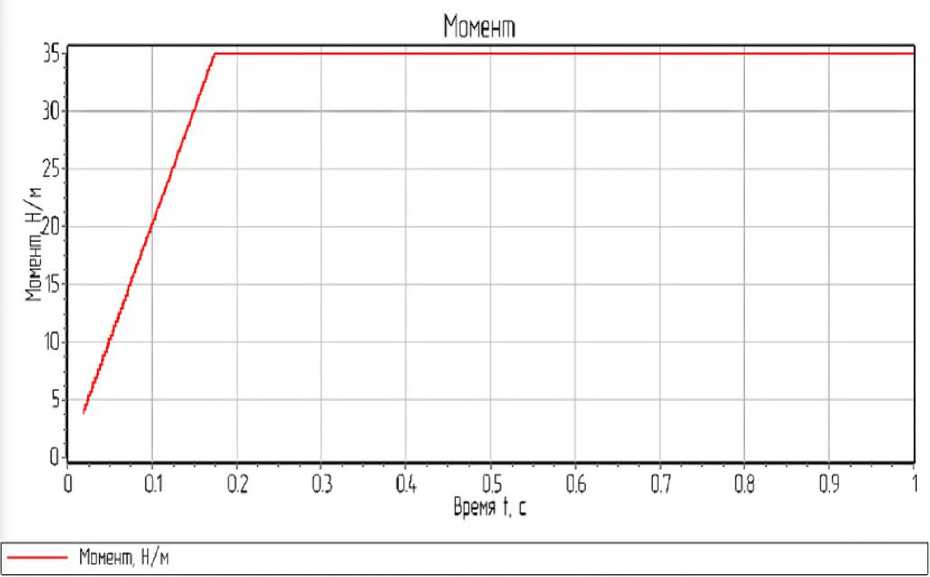
Рис. 8. График нагрузки СДПМ до номинального значения Fig. 8. Graph of PMSM load to the rated value
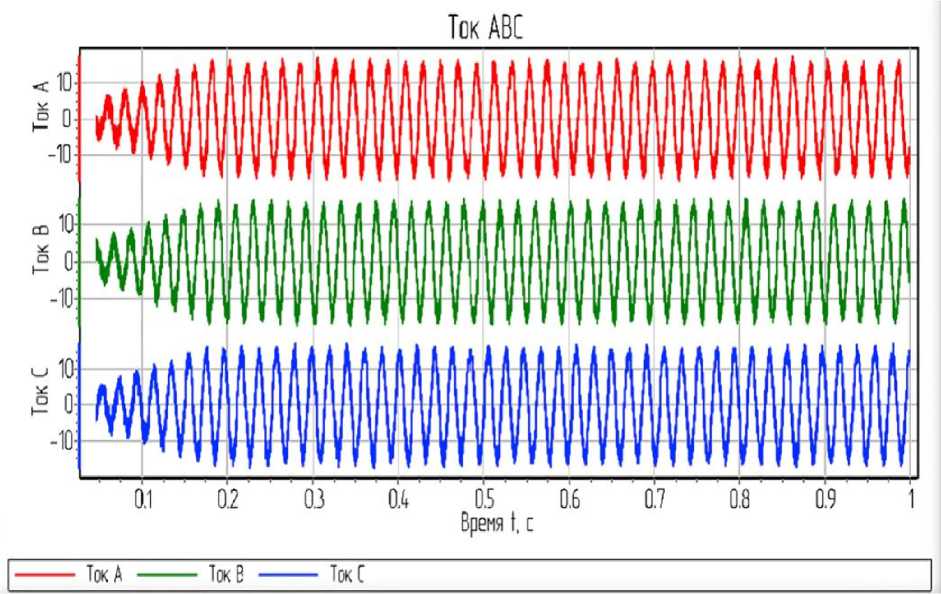
Рис. 9. График тока АВС Fig. 9. ABC current graph
Из графиков видно, что модель соответствует номинальным значениям: двигатель держит номинальную нагрузку (35 Нм) при номинальном амплитудном токе (15 А).
На рис. 10–14 представлены графики моделирования второй зоны регулирования: график скорости (рис. 10); график нагрузки двигателя для определения максимального значения момента во второй зоне регулирования (рис. 11); графики тока в координатах АВС (рис. 12, 13); график тока в координатах dq (рис. 14).
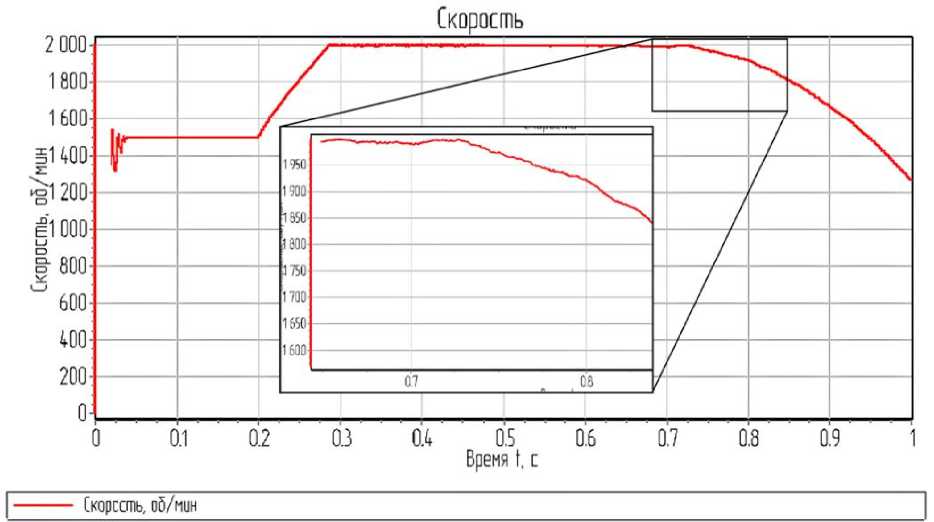
Рис. 10. График скорости СДПМ во второй зоне
Fig. 10. PMSM speed graph in the second zone
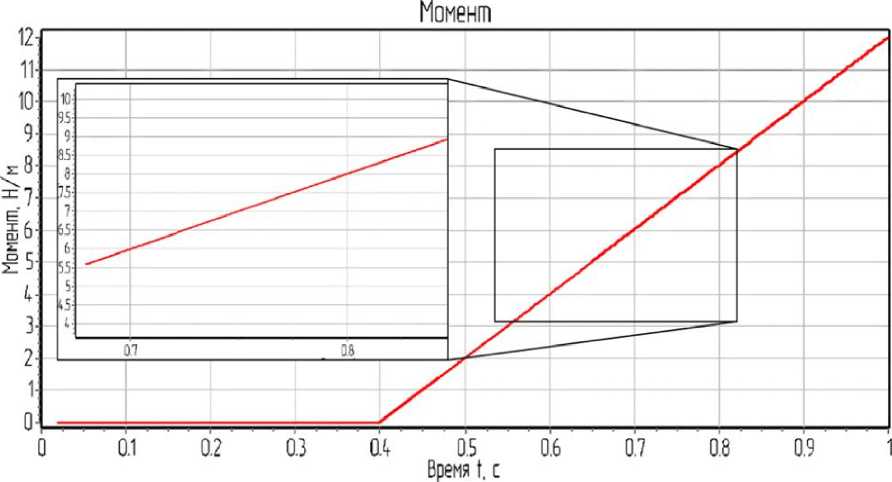
Рис. 11. График нагрузки СДПМ во второй зоне Fig. 11. Graph of PMSM load in the second zone
------- Момент. Н/м
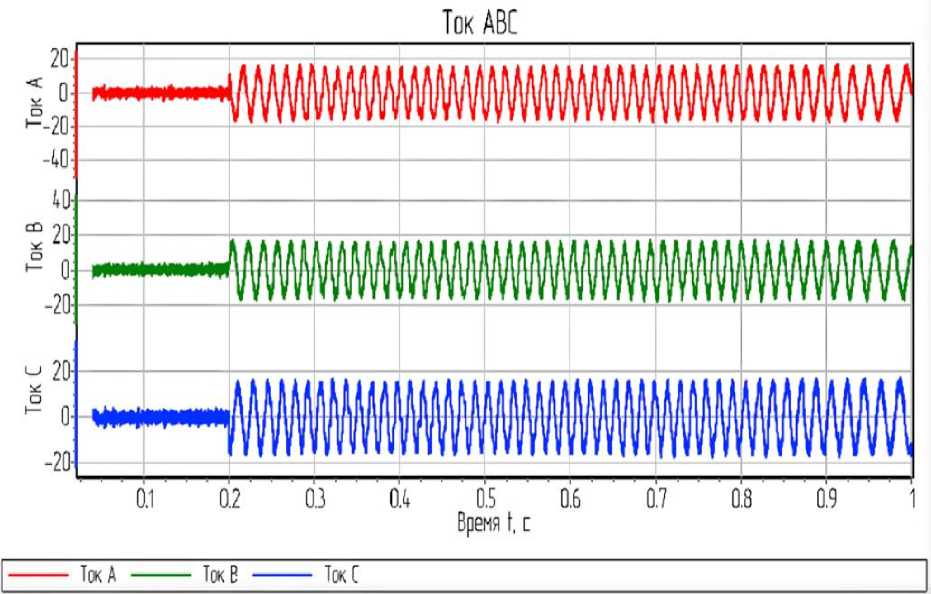
Рис. 12. График тока АВС во второй зоне
Fig. 12. ABC current graph in the second zone
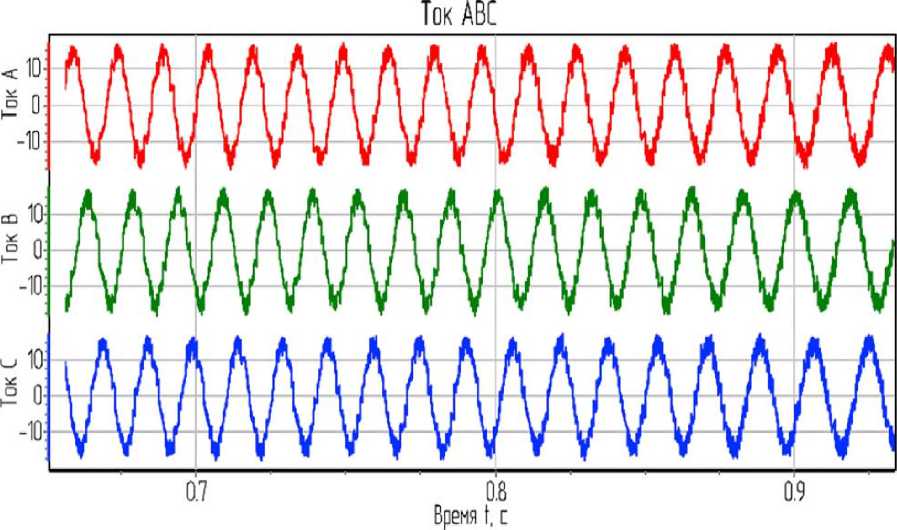
Ток А
Ток О
Ток С
Рис. 13. График тока АВС во второй зоне (зоне перегрузки двигателя) Fig. 13. ABC current graph in the second zone (the engine overload zone)
Из графиков видно, что СДПМ переходит во вторую зону регулирования, где ток Iq поддерживается на нулевом уровне, а ток Id задается на максимально возможное значение, равное амплитудному значению тока. Двигатель в данном режиме способен разогнаться до 2 000 об/мин, что приблизительно равняется 133 % от номинального значения, а также удерживать значение момента, приблизительно равное 6,5 Нм, не превышая номинальное значение тока.
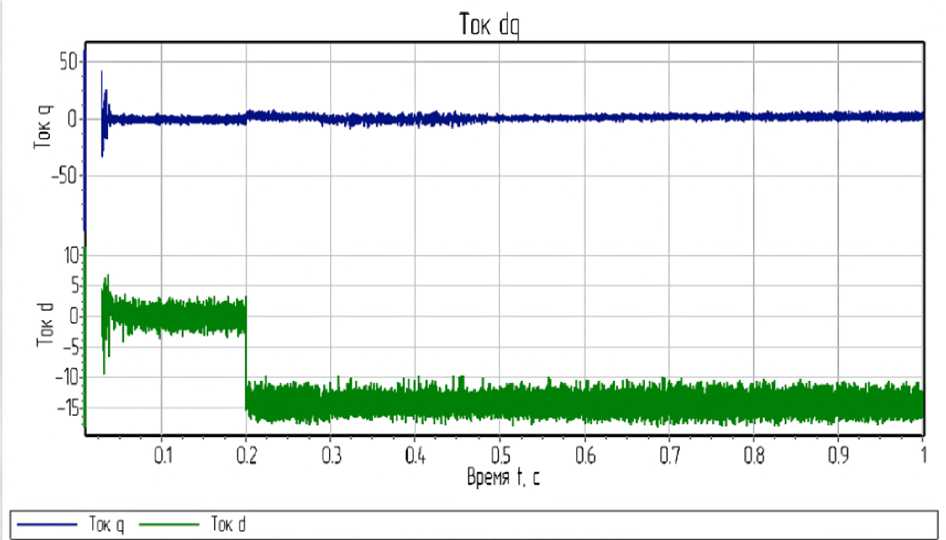
Рис. 14. График тока dq во второй зоне
Fig. 14. dq current graph in the second zone
На рис. 15–19 представлены графики моделирования процесса регулирования СДПМ во второй зоне с использованием дополнительных индуктивностей: график скорости (рис. 15); график нагрузки двигателя для определения максимального значения момента во второй зоне регулирования (рис. 16); графики тока в координатах АВС (рис. 17, 18); график тока в координатах dq (рис. 19).
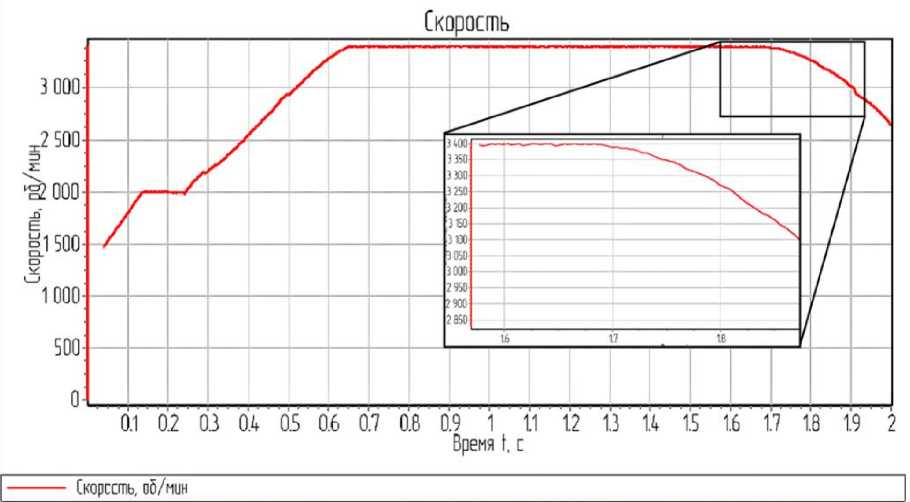
Рис. 15. График скорости СДПМ с расширением диапазона во второй зоне
Fig. 15. PMSM speed graph with range expansion in the second zone
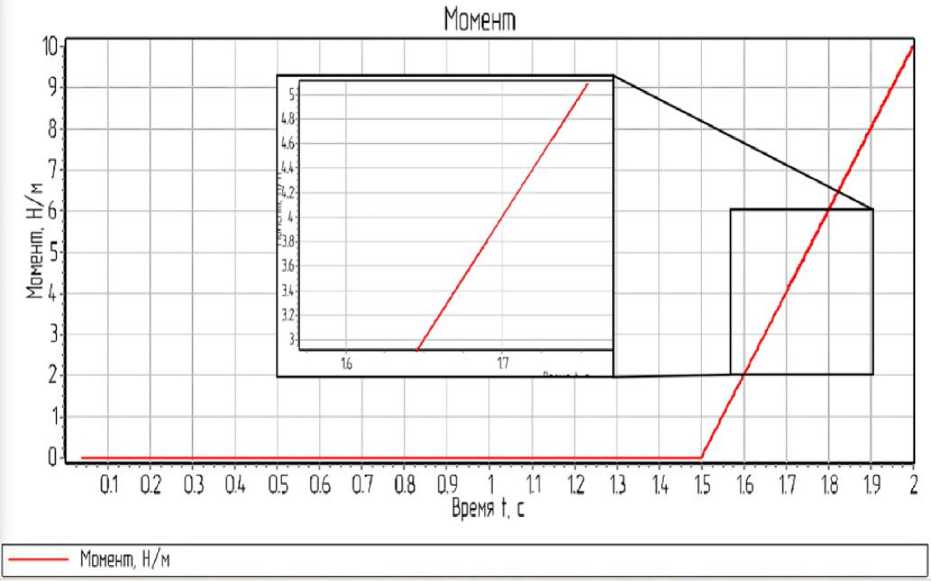
Рис. 16. График нагрузки СДПМ с расширением диапазона во второй зоне Fig. 16. Graph of PMSM load with range expansion in the second zone
Ток ABC
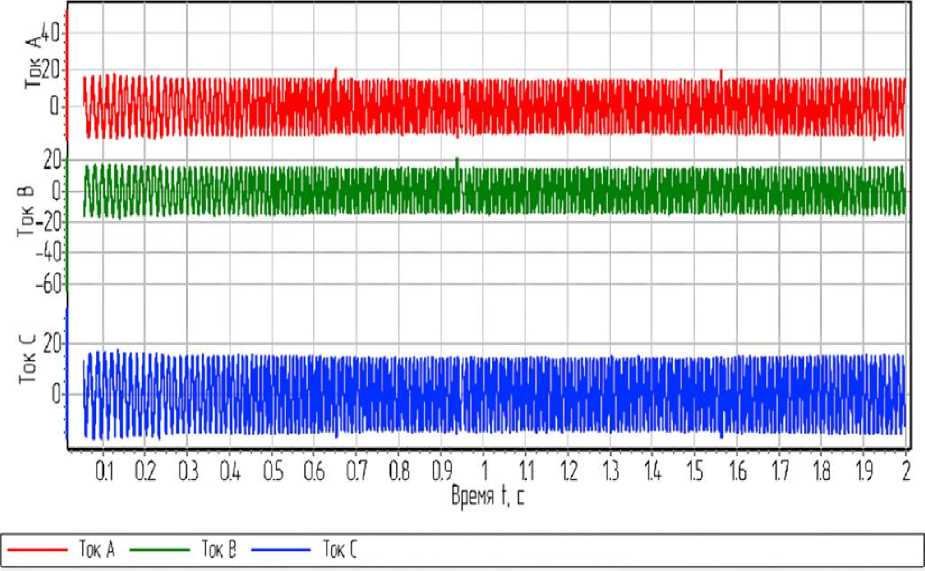
Рис. 17. График тока АВС с расширением диапазона во второй зоне Fig. 17. ABC current graph with range expansion in the second zone
Графики моделирования показывают, что расширение диапазона регулирования во второй зоне СДПМ возможно. СДПМ развивает скорость до 3 400 об/мин, что приблизительно равняется 227 % от номинального значения. Двигатель в данном режиме удерживает значение момента, приблизительно равное 4 Нм, при этом не превышает номинальное значение тока.
Ток ABC
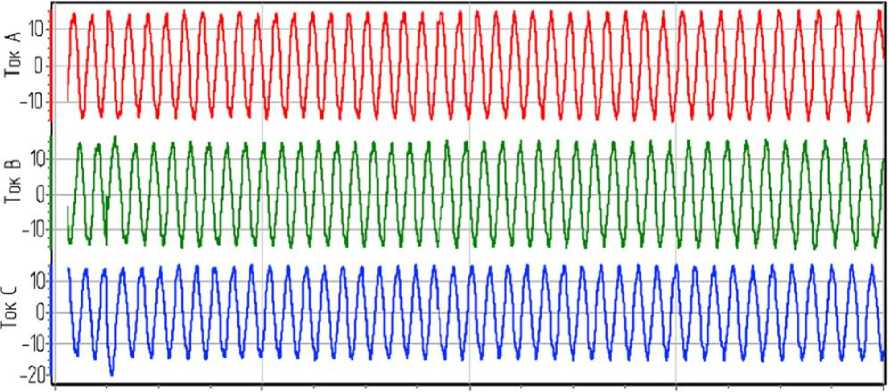
1.5 16 1.7 1.8 1.9
Время 1. с
-------- Ток А -------- Ток S -------- Ток С
Рис. 18. График тока АВС с расширением диапазона во второй зоне (зоне перегрузки двигателя) Fig. 18. ABC current graph with range expansion in the second zone (the engine overload zone)
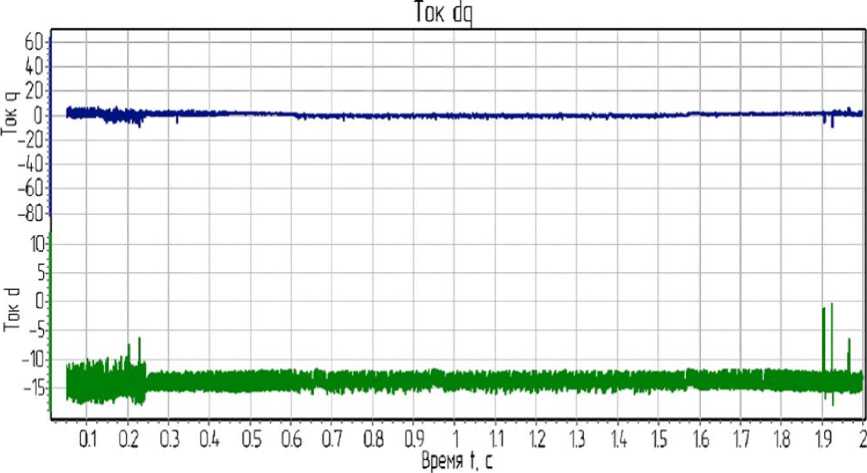
Ток q --------Ток d
Рис. 19. График тока dq с расширением диапазона во второй зоне Fig. 19. dq current graph with range expansion in the second zone
Разработанный подход к управлению синхронными двигателями с постоянными магнитами показал свою эффективность, обеспечивая двукратное увеличение скорости привода главного движения металлорежущего станка без ухудшения энергетических характеристик. Внедрение дополнительных индуктивностей позволило расширить диапазон регулирования скоростей, улучшив точность и качество обработки, особенно при работе с мягкими металлами. Эти результаты подтверждены в ходе моделирования и имеют значительную практическую ценность для повышения производительности станков и качества обработки деталей на промышленных предприятиях.
Заключение
Система управления синхронным двигателем с постоянными магнитами играет важную роль в работе электропривода главного движения металлорежущего станка. Созданная математическая модель позволила провести симуляцию работы двигателя как на номинальных, так и на повышенных оборотах, а также изучить возможность расширения диапазона скоростей с использованием дополнительных обмоток. Результаты показали, что система управления при работе в зоне ослабления поля обеспечивает поддержание энергопотребления в пределах номинальных значений. Таким образом, предложенная система векторного управления способствует эффективному регулированию электропривода главного движения, обеспечивая надежную и безопасную эксплуатацию станка.
Металлорежущие станки, оснащенные данной системой, демонстрируют улучшенные эксплуатационные характеристики, включая высокую точность и качество обработки деталей, особенно при работе с мягкими металлами. Это способствует повышению производительности и точности механической обработки материалов.
Интеграция предложенного метода также позволяет настраивать параметры работы станков в соответствии с конкретными задачами, делая производство более гибким и экономически выгодным. Повышение точности управления и уменьшение колебаний мощности обеспечивают высокое качество обработки сложных деталей, что особенно важно для высокоточных производств.
Применение разработанного метода не ограничивается фрезерными станками. Алгоритм управления может быть адаптирован для других типов металлообрабатывающих станков (токарных и шлифовальных), где требуется расширение диапазона скоростей при сохранении точности и стабильности работы.
Предложенный подход может быть использован в приводах с числовым программным управлением (ЧПУ), а также в робототехнических системах, где необходимо точное и динамическое регулирование скоростных характеристик и момента, что делает предложенную систему универсальной и открывает возможности для ее внедрения в другие промышленные системы.
Научная и практическая значимость исследования заключается в его применении в различных промышленных сферах. Внедрение предложенных улучшений в управление электроприводами на базе СДПМ может стать основой для будущих разработок, направленных на повышение эффективности и точности работы металлообрабатывающего оборудования. Таким образом, результаты исследования являются важным вкладом в развитие технологий автоматизированного управления электроприводами и их адаптации к современным производственным требованиям.
