Разделение ионов в комбинации стационарных полей — электрического квадрупольного и магнитного однородного

Автор: Голиков Ю.К., Краснова Надежда Константиновна, Николаев В.И., Соловьев К.В.
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Масс-спектрометрия
Статья в выпуске: 1 т.23, 2013 года.
Бесплатный доступ
В статье исследуется поведение ионного пакета в скрещенных полях — статическом электрическом квадруполе и однородном поперечном магнитном поле. В аналитической форме найдены множество режимов финитных движений, а также варианты удержания ионов в канале квадруполя. Определены начальные условия движений и параметры полей, когда система превращается в ловушку и реализуется режим фарвитрона.
Статический квадрупольный масс-фильтр, однородное магнитное поле, удержание ионов, ионная ловушка, фарвитрон, устойчивые движения
Короткий адрес: https://sciup.org/14264844
IDR: 14264844 | УДК: 537.533.7:
Ion’s separation in the static fields: quadrupole electric and homogeneous magnetic
The behaviour of ion packet in the crossing static electromagnetic fields is investigated in the article. Homogenous transverse magnetic field is applied to quadrupole analyser which works in the static mode. A number of finite trajectories and the conditions for keeping ions in the canal of the device are determined by analytical methods. The initial conditions and parameters of the fields are formulated when the system works as an ion’s trap or farvitron.
Текст научной статьи Разделение ионов в комбинации стационарных полей — электрического квадрупольного и магнитного однородного
Первая публикация о возможности использования в масс-анализе квадрупольного поля появилась в 1953 г. [1], авторами которой были В. Пауль и его коллеги из Боннского университета, а позднее группа В. Пауля получает патенты на квадрупольный масс-спектрометр [2] и в течение ряда лет успешно развивает теорию этого нового устройства. Несмотря на столь давнюю историю квадрупольный масс-фильтр не утратил своих позиций и по сей день и занимает определенную нишу в парке масс-спектрометрических приборов. Технология изготовления, настройка прибора и его обслуживание настолько отработаны, что квадруполь используется широко и в сложных системах на предварительных этапах анализа, и как основной элемент масс-спектрометров. Подробно изучены различные режимы работы масс-фильтра, найдены эффективные решения разноплановых задач масс-анализа, определены оптимальные параметры этих режимов. И хотя массовое разрешение, достигаемое в квадрупольном масс-спектрометре, не столь велико, однако интерес к ним со стороны разработчиков не угасает.
Мы предлагаем ряд новых приложений и режимов работы квадрупольного масс-спектрометра, к которому прикладывается однородное магнитное поле. Далее будет показано, что в случае стационарных полей (электрического и магнитного) наблюдаются устойчивые траектории ионов. Кроме того, обнаружилось существование линейных многообразий в фазовом пространстве начальных данных, обеспечивающих финитность поперечных движений. В связи с этими обстоятельствами наметились идеи построения масс-спектро-
метрической стационарной системы на комбинации скрещенных полей, которую можно воспринимать как обобщение фильтра Вина с неоднородным электрическим полем и спиральными осевыми траекториями.
Данное теоретическое исследование построено в аналитической форме, и для удобства анализа движений уравнения приведены к безразмерным координатам и времени. Изложим подробнее используемую безразмерную модель движения.
БЕЗРАЗМЕРНАЯ МОДЕЛЬ ДВИЖЕНИЯ
Положим:
R = X i + Y j + Z k = £ • r = £ ( x i + y j + z k ) , t = T • t ,
где Х , Y , Z , t — размерные координаты и время; x, y, z, τ — безразмерные координаты и время; £ , T — выбранные линейный и временной масштабы. Поскольку в квадрупольном масс-спектрометре электрическое поле обычно предполагается периодическим, то в качестве единицы времени Т выгодно принять именно период колебания высокочастотного поля независимо от того, синусоидальное оно или какой-либо иной формы.
Потенциал квадрупольной системы можно записать тогда в виде
Ф =
Ф0 + Ф1 • f I
X 2
- Y
£
где Ф0 и Ф1 — размерные значения потенциала (в вольтах). В безразмерных параметрах последнее выражение можно переписать как ф —[ф0 +ф1 • f (т)]•(x2 -У2), f (т + 1)= f (т).
Вектор индукции можно представить как
B — B 0 • b — B 0 ( bii + b 2 j + b 3 k ) , (4)
где В 0 — характерное, например максимальное, значение индукции внутри прибора на его периферии; вектор b — безразмерный и его компоненты — обязательно гармонические функции безразмерных координат x , y , z . Тогда в векторной форме уравнение движения:
m
T 2 ’ r
— - 2q [ф 0 +ф 1 • f ( т ) ] ( x - y j ) + qB [ r X b ] ,
где точками обозначены производные по τ. Приводя коэффициенты к безразмерной форме, получим уравнение вида r = -[ц + V • f (т)](xi-yj) + Л-[Г Xb],(6)
где введены обозначения
2 q Ф T 2 2 q Ф Т 2
ц — , V — о , Л — m I m I
АНАЛИЗ ДВИЖЕНИЙ ИОНОВ В СТАТИЧЕСКИХ ПОЛЯХ
Исключим высокочастотную (ВЧ) компоненту поля ( Ф 1 = 0) из уравнения (6), что равнозначно условию V — 0 . Имеем:
r — - ц( xi - y j) + Л • [r x b], ц — 2q^TL, Л — qBT.
m /2
Выбор Т можно подчинить каким-то более выгодным условиям, чем период ВЧ-поля:
т m 1 Г 2nm ) T
Л — 1 или T —---— — ----I — —.(8)
qB 0 2 n ( qB 0 J 2 n
Таким образом, мы принимаем в качестве физической единицы времени примерно 1/6 циклотронного периода Тц. В этих условиях ц — 2
m Ф 0 q ^ B o2 .
Система уравнений движения в стационарном случае при новом выборе Т примет простой вид x — -цх + yb3 -zb2, < y — цу + zb1 -xcb3,(10)
z — xc b 2 - y b 1.
Числа b1, b2, b3 следует связать условием b2 + b 22 + b 32 — 1.(11)
Интегрирование третьего уравнения системы (10) дает z — zo + b 2 •(x -x 0 )-b1 •( y - y 0 ).
Исключение z из первых двух уравнений системы (10) дает систему для поперечного движения вида x — - (ц + b 22) x + b1 b 2 y + b3 y - b 2 N, y — (ц - b2)y + b1 b2x - b3.x + b1 N, (13)
N — z o + b 1 y 0 - b 2 x 0 .
В своем исследовании мы ограничимся рассмотрением только случая приложения к каналу квадруполя поперечного магнитного поля, оставив за рамками статьи другие варианты — продольное поле и более общий случай — косоугольное.
ПОПЕРЕЧНОЕ МАГНИТНОЕ ПОЛЕ
При условии b 3 — 0 система (13) существенно упрощается:
x — -(ц + b 22) x + b1 b 2 y - b 2 N, y — (ц - b12) y + b1 b2x + b1 N, (14)
N — z o + b 1 y 0 - b 2 x 0 .
В зависимости от соотношения параметров µ , b 1 , b 2 и комбинирования их знаков могут происходить различные динамические явления, весьма неочевидные. Разберем последовательно их в порядке нарастания сложности.
Ситуация 1 ( b 1 — 0, b 2 — 1 )
Пусть магнитное поле имеет ненулевую только у -компоненту b 1 — 0, b 2 — 1, b 3 — 0. Присоединяя к системе (14) и уравнение по z (12), имеем
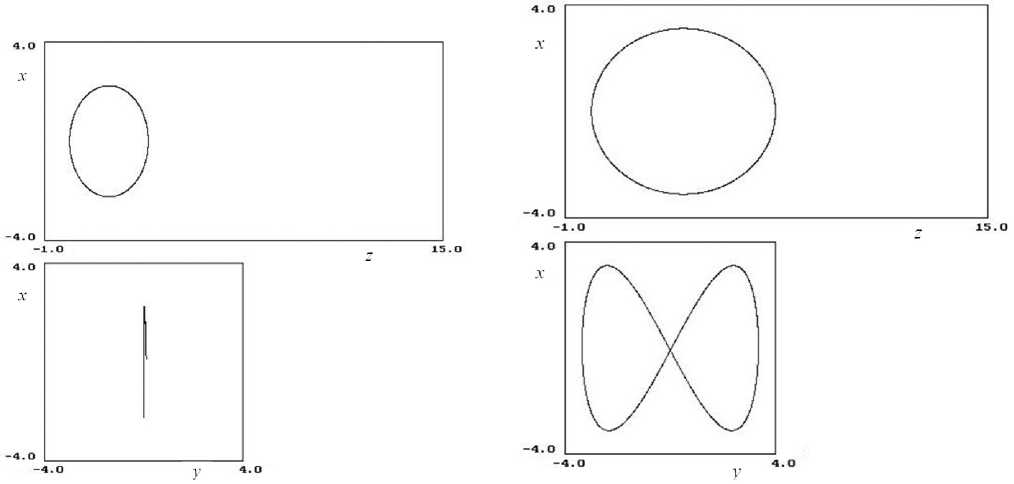
Рис. 1. Ловушечный режим движения.
Начальные условия: x 0 = 0.1, у 0 = 0.1, z 0 = 0, w 0 = ( x 0 2 + y 2 + z 0 )/2 = 5. Параметры полей: ц = 0.5, Л = 1
Рис. 2. Движение ловушечного типа.
Начальные условия: x 0 = 0.1, у 0 = 0.1, z 0 = 0, w 0 = ( x 2 + у О + z 2 )/2 = 5, у0 = 1.5. Параметры полей: ц = 0.2, Л = 1
x = —( ц +1) x — N, .у = цу, z = x + N;
N = z0 — x0.
Рассмотрим варианты решений этой системы (15) в зависимости от значения параметра µ .
Вариант а ( ц > 0 ) . В этом случае решение системы (15) будет иметь вид
z0 + цx x
x = —----0 cos GT +—0 Sin GT - ц + 1 G
N
ц + 1
1 ( y='
A
+A
V ц J
• e

(
z = z0 + V
X
x0
ц+ 1J
+
µN ц+ 1
t +
z0 + цx x0
+—0-----0 Sin GT--0- cos GT ,
G( ц + 1) G2
где g = ц + 1.
В данных условиях вдоль оси X ионы колеблются с частотой σ со смещенным центром колебаний, по оси Y в общем случае наблюдается экспоненциальное разбегание, а по оси Z дрейф с колебаниями. Но если на начальные условия наложить требование N = 0 и "занулить" коэффициент во втором уравнении системы (17) при растущей экспоненте, то по осям X , Z будут наблюдаться чисто гармонические колебания с частотой g = ^ц + 1 , а вдоль оси Y ионы асимптотически приближаются к плоскости у = 0 (рис. 1).
Таким образом, при условиях
. у 0 =- 'Гц У 0 , _ :^0 = x 0
и при любых x 0, z 0 в системе образуется ионная ловушка с финитным движением.
Вариант б ( ц < 0 ) . Знак ц можно поменять за счет изменения знака Ф 0. Если
— 1 < ц < 0,
то по обеим координатам x и y имеют место гармонические колебания с частотами с=71 -hi, $=th. (20)
По осям X, Z движение по-прежнему выражается формулами 1 и 3 в системе (17), но по Y будет выражение y = y 0cos VHT + yrs sin (21) µ
При условиях (20) ловушка образуется, если положить N = 0 и вместо условий (18) появится менее стеснительное ограничение
Z o = x 0 , (22)
а остальные начальные данные у 0 , у 0, z 0 , x 0 могут быть любыми. Рис. 2–5 иллюстрируют характер движений в образующейся ловушке.
Величина N = z 0 - x 0 управляет дрейфом вдоль оси Z , и скорость дрейфа тем меньше, чем ближе мы к условию (16). Траектория в этом случае представляет собой некий асимметричный клубок, медленно катящийся вдоль оси Z .
Этот режим можно очень интересно использовать в масс-спектрометрии, если учесть, что колебаниям с безразмерными частотами 71 + Н и 7Н отвечают реальные гармонические колебания ионов с частотами, однозначно связанными с массами m. Если канал квадруполя заполнен медленно катящимися клубками ионов, то на подходящем емкостном приемнике можно выделять электрические сигналы, спектральный состав которых несет
x
z
x
y
Рис. 3. Движение ловушечного типа.
Начальные условия: x 0 = 0.1, у 0 = 0.1, z 0 = 0, w 0 = ( Х 02 + у 0 2 + Z ^ )/2 = 5, у 0 = 1.5. Параметры полей: н = - 0.4, Л = 1
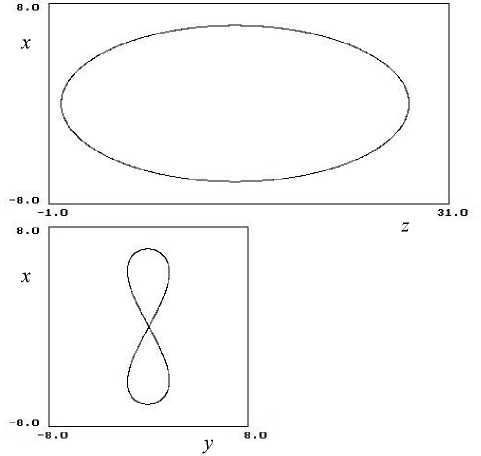
Рис. 5. Движение ловушечного типа.
Начальные условия: x 0 = 0.1, у 0 = 0.1, z 0 = 0, w 0 = ( x 02 + у 0 2 + z ^ )/2 = 5, у 0 = 1.5. Параметры полей: н = - 0.8, Л = 1
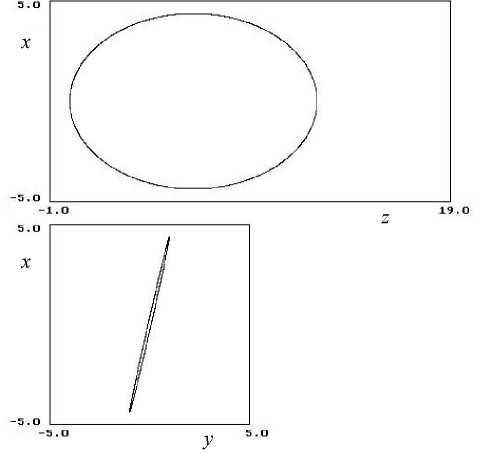
Рис. 4. Движение ловушечного типа.
Начальные условия: x 0 = 0.1, у 0 = 0.1, z 0 = 0, w 0 = ( Х 2 + у 0 2 + z 2 )/2 = 5, у0 = 0.7. Параметры полей: н = - 0.5, Л = 1
информацию о масс-спектре. Иначе говоря, в системе можно реализовать идею фурье-масс-анализ-атора (фарвитрона).
Вариант в ( 4 = - 1 ) . При условии 4 = - 1 сис-
|
1 |
µ |
x z 0 . X 0 o-r . |
|
X = — |
и и 0 , аа Т -L- |
|
|
2 |
к |
4 -1 ^Р ^e |
тема (15) вырождается:
J X = — N , I У = - У ; z = x + N ,
и решение представляется в виде
N 2
X = ——Т + X 0Т + X0, y = y 0 cost + yosin т,
z = z0 т + x 0 т 2 - —т 3 + z 0.
02 6 0
Здесь поведение ионов совсем другое. По осям X , Z имеет место ускорение, и только вдоль оси Y сохраняются гармонические колебания. Однако и тут все-таки удается организовать ловушку, наложив условия
+ —
|4 X 0 z 0 1 4 - 1
У = У 0 cos
у
z = —
2 σ
-
к
x 0
-
1 4 X о
2 σ
+ z 0
z 0
-
к
-
x 0
^
X0
4 4 - 1 у
y 0
+
z 0
µ
sin
x 0
-
x 0
• e
- ат
µ
τ ,
к
У
στ
• e
к
у
-
• e
- ат
µN
1 4 - 1 1 Ц - 1
τ .
Если "убить" коэффициент при e
N
1 4 - 1
+
στ
и
, (29)
N = 0 , то
получим ловушку при следующих условиях:
N = 0, z 0 = 0, x 0 = 0. (25)
Отсюда очевидно: надо положить еще x 0 = 0. (26)
Произвольными остаются начальные данные y 0 , y 0 , z 0 . И в этом режиме можно образовать фарвитрон со своими возможностями.
Вариант г ( ц < - 1 ) . Система (15) дает заведомо экспоненциальные движения как по оси X , так и по оси Z , по Y сохраняются гармонические колебания. Выбором начальных данных можно "убить" растущую компоненту, и при этом появляется новый тип динамических колеблющихся траекторий. Рассмотрим все это подробнее.
Сначала перепишем систему (15):
X = (| 4 — 1 ) x - N ,
_ y = -| 4 У ;
z = X + N , (27)
N = z0 - X 0 .
Положим, как и раньше, в тех же обозначениях a = 44-1, Ц > 1. (28)
Интегрирование дает выражения:
|
• _ z 0 I 4 X 0 |
|
l x 0 У Й7^ |
|
_ z o - X 0 = 0, |
или
Пример ловушечного режима приведен на рис. 6.
При z 0 * X 0 и выполнении первого условия из (33) имеет место дрейф вдоль оси Z , колебания по Y и асимптотическое стремление всех ионов к плоскости x = const. Рис. 7 иллюстрирует особенности такого дрейфующего движения.
Ситуация 2 ( b 2 = 0, Ь 1 = 1 )
Теперь магнитное поле ориентировано вдоль оси Х , Ь 1 = 1, b 2 = 0, b 3 = 0. Система, составленная из (14) и (12), примет вид
X = - 4X ,
_ У = ( 4 - 1 ) у + N ; z = - y + N , N = z o + У 0 .
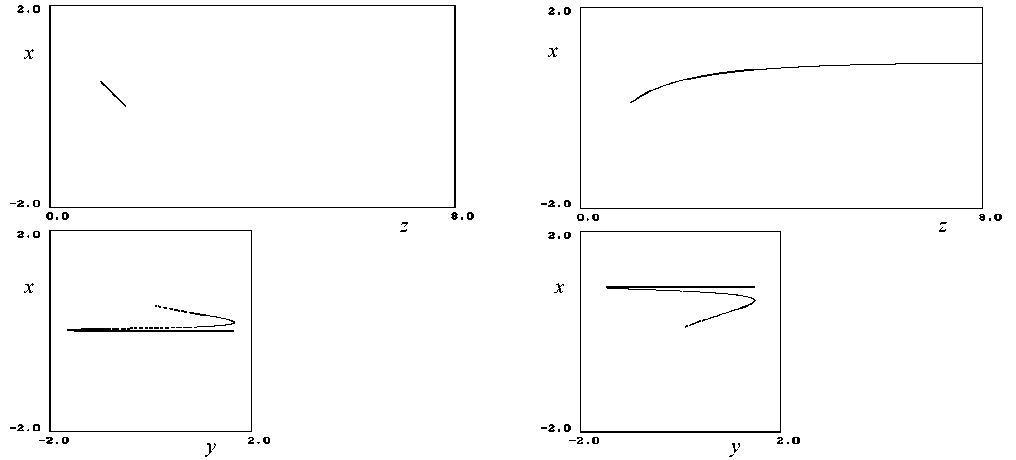
Рис. 6. Ловушечный режим.
Начальные условия: x0 = 0.5, y0 = 0.1, z 0 = 1.0, w0 = ( x2 + y2 + z02) /2 = 3. Пара метры полей: ц = -2, X = 1
Рис. 7. Режим удержания в плоскости XY и дрейф вдоль оси Z .
Начальные условия: x 0 = 0.1, y 0 = 0.1, z 0 = 1.0, w 0 = ( x 2 + y 0 2 + z 02)/2 = 3, z0 = 1. Параметры полей: ц = - 2, X = 1
Чередованием знаков µ и переименованием переменных эту ситуацию легко привести к предыдущей, и потому ее разбирать ни к чему.
Ситуация 3 ( b1 * 0, b 2 * 0, b3 = 0 )
Пусть магнитное поле произвольно направлено по отношению к осям Хи Y , b 1 * 0, b 2 * 0, b 3 = 0.
Система (14) и уравнение (12) примут вид
Ее решения суть
A = , b 2 N , B = , b - N .
b 2 - b 2 2 - ц b 1 2 - b 2 2 - ц
Положим ц * b2 - b22
и займемся однородной системой:
x = - ( ц + b 22) x + b 1 b 2 y - b 2 N , y = b j b 2 x + ( ц - b 2 ) y + b j N ;
x = - ( ц + b 22) x + b 1 b 2 y , y = b 1 b 2 x + ( ц - b 2 ) y .
z = b 2 x - yb 1 + N ,
N = z0 - b 2 x 0 + b 1 y 0 .
Система (36), состоящая из двух первых уравнений, неоднородна, и ее решение состоит из частного решения x 1 = A = const, y 1 = B = const и общего решения однородной части. Для определения А и В имеем алгебраическую систему
В соответствии с методом Эйлера ищем частные решения вида
' x = P • ek T , . y = Q • e k ,
где P , Q , k — неизвестные пока числа. Подстановка (41) в (40) дает следующую однородную линейную алгебраическую систему относительно P , Q :
- ( ц + b 2 2 ) A + b 1 b 2 B = b 2 N , b 1 b 2 A + ( ц - b 12 ) B = - b 1 N .
'( k 2 + ц + b 2 ) • P - b 1 b 2 Q = 0,
- b 1 b 2 P + ( k 2 - ц + b 1 2 ) • Q = 0.
Определитель этой системы обязан обращаться в нуль, что дает характеристическое уравнение относительно показателя k :
в — b 2 x 0 + b 1 y 0 , Y — b 2 x 0 + b 1 y 0 .
k 2 + ц + b 22 - b 1 b 2
- b 1 b 2 k 2 - ц + b 1
Развернув (43) и приняв во внимание соотношение lb + b 22 — 1, получим характеристическое уравнение
С помощью связи (50) можно исключить из первого уравнения системы (47) функцию y , а из второго уравнения системы (47) функцию х : возникает система из двух изолированных уравнений второго порядка относительно x и y по отдельности. С учетом соотношения b 1 2 + b 2 2 — 1 выводим:
k 4 + k 2 - ц 2 + ц ( b 12 - b 22 ) = 0. (44)
Его корни:
x — - x + b 2 ( ат 2 + вт + Y - N ) , y — - y + b 1 ( ат 2 + вт + Y + N ) •
k 1 =
—
—+
4 - ц ( b - b 22 ) + ц 2,
k 2 = - k 1 ,
k 3 —
- 4 - ц ( b1 - b 22 ) + ц 2,
Общее решение однородной части здесь, очевидно, одного типа — гармонические колебания с частотой о — 1. Неоднородная система имеет частное решение x * , y * в виде квадратичных полиномов, которые легко найти методом неопределенных коэффициентов.
Положим:
k 4 — - k 3 .
Все радикалы понимаются как арифметические положительные величины.
x * — g 1 т 2 + g 2 т + g 3 , y * — s 1 т 2 + s 2 т + s 3.
Подстановка (52) в (51) дает систему
Случай
Ц — b 1 2 - b 22 , (46)
когда k 1 — k 2 — 0, является вырожденным, и он отвечает случаю обращения в нуль определителя алгебраической системы (37). Запишем два первых уравнения системы (36), выразив µ из условия (46), получим в этом случае x — - b12 x + b1 b2 y - b2 N, y — b1 b2 x - b2 y + b1 N.
Умножим первое уравнение из (47) на b2, а второе — на b1, и сложим результаты. Получим интегрируемое соотношение b2x + b 1 y — (b 12 -b22 )• N. (48)
Интегрируя (48) с учетом начальных данных x0, x0, y0, y0 в момент т — 0, находим соотношение b 2 x + b1 y — ат2 + вт + Y, (49)
2 g i — - дт 2 - g 2 т - g 3 + b2 ат 2 + b 2 вт + b 2 ( Y - N ) , 2 s 1 —- s1т 2 - s 2 т - s 3 + ^ ат 2 + b1вт + b 1 ( y + N ) .
Приводя к нулю коэффициенты при линейно независимых степенях τ , получим уравнения для всех g и s :
g 1 — аb 2 , g 2 — вb 2 , g 3 — b 2 ( Y - N ) - 2 аb 2 , s 1 — аb 1, s 2 — вb 1, s 3 — b 1 ( y + N ) - 2 аb 1 .
**
Следовательно, частное решение x , y :
x * — b 2 ( ат 2 + вт + Y - N - 2 а ) , y * — b 1 ( ат 2 + вт + Y + N - 2 а ) .
Общее решение для (51) можно теперь записать с учетом (55) в виде x—Ц cos т+M2sinт+b2 (ат2 + вт+Y - N - 2а), y—L cos т+L2sinт+b1 (ат2 + вт+Y+N - 2а).
b 2
где а — N 1
-
b 2
2 и
Выразим М 1 , М 2 , L 1 , L 2 через начальные данные, получим окончательно x ( т ) , y ( т ) в виде
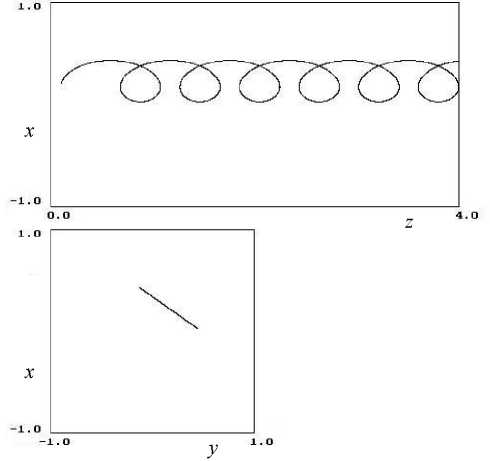
Рис. 8. Финитное движение в плоскости XY и дрейф вдоль оси квадруполя.
Начальные условия: x 0 = 0.2, y 0 = 0.2, z 0 = 0.1, w 0 = ( x 0 2 + y 0 2 + Z 2 )/2 = 3, x 0 = 0.2. Параметры по
b 2 x 0 - b 1 У 0 = z 0 , .b 2 x 0 + b 1 y 0 = 0.
Рис. 8 демонстрирует режим удержания ионов в канале квадруполя в поперечной плоскости, при этом ионы двигаются к выходу канала.
Наши дальнейшие исследования показали, что при поперечном магнитном поле, направленном произвольно относительно осей X и Y , движение в плоскости XY ( x ( т ) , y ( т ) ) является устойчивым, если выполняется условие
0 < ц < b 1 2 - b 22. (60)
Вне этого интервала все траектории неустойчивы. Используя неравенство (60), можно высчитать интересный принцип фильтрации ионов, исходя из переменного интервала масс. Учтем, что параметр μ есть
ц = 2
m Ф 0 q ^ 2 B 0 2.
Тогда для реальной массы m с помощью (60) и (61) мы получим неравенство
лей: ц = - 1, X = 1, b = ^3, b 2 = J23, b 3 = 0
0 < m <
' b 1 2 - b 2 ) q t 2 BjL
I 2 J Ф 0
x = (x0 - b2 ( y - N - 2a)) cos т +
+ (x0 - вЬ2) sinт + b2 (ат2 + вт + Y - N - 2a), y = (y0 - b1 (Y + N - 2a)) cos т +
+ ( У 0 - eb ] ) sin т + b j ( ат 2 + вт + Y + N - 2 a ) .
Движение по осям X , Y будет финитным, если коэффициенты α и β сделать нулевыми, что дает при помощи (50) следующие условия на параметры системы:
a = N (b 2 - b Л = 0,
( 1 2 ) , (58)
в = b 2 x 0 + b , y 0 = 0.
Случай ( b j 2 = b 2 ) мы отбросим, т. к. в этом построении ц = b 2 - b 2 2 и нулевая "масса" ц не фи-зична.
Если взять N = 0 и раскрыть N по третьей формуле системы (14), то получим из (58) условия на начальные данные, удерживающие "массу" ц = 1 в канале квадруполя:
Меняя Ф 0 при замороженных b 1 , b 2 и B 0, мы варьируем верхнюю границу диапазона масс ионов, отфильтрованных в квадруполе, и на детекторе фиксируется некий интегральный спектр, из которого реальный спектр масс получается процедурой электрического дифференцирования.
ЗАКЛЮЧЕНИЕ
Итак, мы изучили движения ионов в статическом квадруполе и приложенном к нему поперечном магнитном поле. Оказалось, что при определенных параметрах полей и комбинации начальных условий движения ионного пакета можно добиться удержания в поперечной плоскости ионов одного сорта. Наш общий физический вывод можно свести к нескольким положениям.
-
• Эта система допускает режимы ловушки ионов с финитными движениями.
-
• В системе может реализоваться режим интегральной фильтрации с управляемой границей спектра сепарируемых масс с электрической разверткой изменением Ф 0, при неизменном магнитном поле B 0 .
-
• В системе могут реализовываться фарви-тронные режимы.
