Разделенные алгоритмы микропроцессорного управления дизельными двигателями

Автор: Кореньков О.А., Жосан А.А.
Журнал: Вестник аграрной науки @vestnikogau
Рубрика: Эксплуатация и ремонт машин
Статья в выпуске: 5 (8), 2007 года.
Бесплатный доступ
Современное развитие техники, требования предъявляемые к экологическим показателям, необходимость улучшения технико-экономических показателей диктуют необходимость внедрения электронных систем управления двигателем. Для дизельных двигателей эта проблема стоит очень остро, однако для разработки систем управления необходимо выявления ряда закономерностей показателей характеризующих работу двигателя.
Короткий адрес: https://sciup.org/147123256
IDR: 147123256 | УДК: 631.3-6
Текст научной статьи Разделенные алгоритмы микропроцессорного управления дизельными двигателями
Многомерность , многопараметричность двигателя и многочисленность задач управления им требуют применения широкого набора разнообразных алго ритмов управления в микроконтроллере . Очевидно , что в зависимости от назначения , требования к алго ритмам меняются , поэтому можно говорить о необхо димости целого их набора для создания полной сис темы управления . Алгоритмы управления могут быть представлены как в виде функциональных или струк турных схем , так и в виде блок - схем программ санк ционирования микропроцессоров .
Каждой из частных систем управления при ее создании задается исходная версия своего алгоритма управления . В большинстве случаев она остается не изменной на весь период эксплуатации двигателя , но она может быть улучшена в процессе функциониро вания системы .
Методика структурного построения алгоритмов должна быть сравнительно проста и компактна и по зволять :
-
- выполнять четкую алгоритмизацию законов ре гулирования и ограничений по предельно допусти мым значениям параметров ;
-
- обеспечивать достижение конечного результата при минимальном количестве датчиков , времени реа лизации , требуемой памяти , разрядности и т . д .;
-
- обеспечивать устойчивое функционирование ал горитмов при наличии сбоев и отказов аппаратуры , а также ошибок по входной информации ;
-
- учитывать особенности программной и аппа ратной реализации задач регулирования ;
-
- обеспечивать контроль и правильность функцио нирования заданного алгоритма .
Рационально составленные алгоритмы автомати ческого регулирования частоты вращения позволят существенно упростить программную их реализацию , получить минимальное время формирования управ ляющего сигнала , повысить качество регулирования .
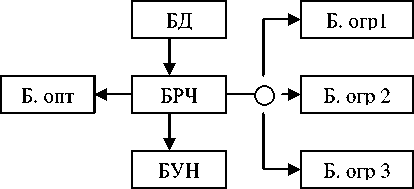
Рисунок 1 - Обобщенная блок - схема разделенных алгоритмов регулирования параметров
На рис. 1 показана обобщенная блок-схема ал- горитма регулирования дизельными двигателями различного назначения. Алгоритм включает следующие элементы: блок исходных данных (БД), блок регулирования частоты вращения (БРЧ), блоки ограничения параметров (Б. огр. 1, Б. огр. 2 и Б. огр. 3), блок управления нагрузкой (БУН), блок оптимизации (Б. опт).
Расширение функций САР (системы автоматического регулирования) производится последовательным дополнением базового алгоритма соответствующими алгоритмическими блоками. Так, наряду с регулированием частоты вращения (блок БРЧ), можно обеспечить регулирование нагрузки (блоки БРЧ и БУН), определить режим работы управляющих меха- низмов по предельно допустимым значениям параметров работы дизеля (соответственно Б. огр. 1, Б. огр. 2 и Б. огр. 3), оптимизировать протекание рабочего процесса за счет реализации алгоритмов формирования оптимальных статических характеристик (блок Б.опт.). Таким образом, программное обеспечение регулирования частоты вращения вала дизеля может включать ряд алгоритмов в зависимости от конкретного режима работы дизеля.
Для тракторного двигателя характерна работа при изменении в широком диапазоне нагрузочного и теплового режимов работы. При этом возникает ряд дополнительных требований, что и вызывает необходимость специального управления работой двигателя на этих режимах.
Наконец, следует иметь в виду, что предъявляемые к двигателю требования могут отличаться друг от друга в зависимости от режима его работы (максимальная мощность, частичные нагрузки, холостой ход, пуск и др.). Так, например, на режимах полных нагрузок- получение возможной топливной экономичности, обеспечение экологических показателей и надежной работы двигателя, на режимах частичных нагрузок -получение максимально возможной топливной экономичности и требуемого протекания характеристики крутящего момента, низкие выбросы токсичных веществ; на режиме холостого хода -устойчивая работа при минимальной частоте враще- ния вала двигателя.
На режим работы тракторного двигателя оказыва ет влияние закономерность изменения нагрузки на крюке . Колебание нагрузки объясняется неоднород ностью по физическим свойствам почвы , а также раз личным микрорельефом поверхности поля , поэтому сопротивление перекатыванию МТА и сопротивление рабочих органов сельскохозяйственного орудия не прерывно изменяются .
Колебания момента сопротивления характеризу ются периодом изменения , Т ( с ) и степенью его не равномерности :
max min
^, — ( М — М ) / M (1)
к с c c . cp .
Коэффициент возможной перегрузки двигателя :
max длит
У к = Мсср./ Mc / cp .
max где М с . ср .
- среднее значение временно возросшего момента сопротивления двигателя;
M длит c / cp .
- среднее
длительно наблюдаемое значение момента сопротив- ления двигателя.
Возрастание величия δк , Т и υ k ухудшает показа тели работы двигателя .
При выполнении трактором различных сельско хозяйственных операций указанные показатели име ют различные значения , наибольшие из которых на блюдаются при пахоте и составляют : δк =0,3...0,4, Т =1...2 с ; m=6,28...3,14 Гц ; υ k=l,3...1,4.
В практике эксплуатации тракторных двигателей с механическим всережимным регулятором встреча ются случаи весьма продолжительных временных возрастаний нагрузок , которые на пахоте , боронова нии и комбайновой уборке достигают 11...37 с , а при холостом ходе по вспаханному полю - 6...18,5 с . Практически в этих пределах находится длительность возрастания нагрузок транспортных тракторных агре гатов и особенно тех из них , в которых скоростной режим двигателя изменяется с помощью педали управления подачей топлива .
Конкретными частными задачами управления двигателем в эксплуатации может быть оптимизация установившихся режимов . Для каждого из них долж ны использоваться различные варианты критерия оп тимальности в зависимости от выбранной конструк ции двигателя .
Даже при решении задач оптимизации управле ния двигателем только в эксплуатации и с ограничен ным перечнем управляющих воздействий трудно вы брать единый обобщенный критерий оптимальности управления . Частные задачи оптимизации управления двигателем решаются разными программами , имею щимися в микроконтроллере .
В наиболее общем случае в качестве критерия оп тимальности , используется расход топлива при огра ничениях на управляющие воздействия по техниче ским и экологическим параметрам .
В значительной мере это обусловлено возможно стью использования в качестве сигнала , выражающе го текущее значение расхода топлива двигателем , управляющего воздействия системы автоматического регулирования частоты вращения , входящей в состав микроконтроллера наиболее сложно управляемых двигателей .
