Разгон гиророторов и включение избыточного кластера гиродинов в контур управления ориентацией информационного спутника

Автор: Сомов Сергей Евгеньевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 4-1 т.19, 2017 года.
Бесплатный доступ
Предлагается и исследуется метод разгона гиророторов и приведения кластера гиродинов в парковое состояние без создания возмущающих моментов при угловой стабилизации корпуса спутника с помощью двигательной установки. Приводятся результаты исследования процессов при разгоне гиророторов, приведения в парк и включения силового гироскопического кластера в контур управления ориентацией спутника на солнечно-синхронной орбите.
Космический аппарат, управление ориентацией, кластер гиродинов, разгон роторов, а gyrodine cluster
Короткий адрес: https://sciup.org/148205272
IDR: 148205272 | УДК: 629.78
Acceleration of gyrorotors and switching on a redundant gyrodine cluster in a loop for attitude control of information satellite
We have suggested and studied the method for acceleration of gyrorotors and to bring the gyrodine cluster to its park state without the creation of disturbing torques during angular stabilization of the satellite body by a propulsion unit. We have presented the research results on processes of acceleration the gyrodine rotors, the bringing the gyro moment cluster into the park and its switching on in a loop for the attitude control of an information satellite in sun-synchronous orbit.
Текст научной статьи Разгон гиророторов и включение избыточного кластера гиродинов в контур управления ориентацией информационного спутника
После отделения информационного спутника от ракеты-носителя и механического раскрытия его солнечных батарей (СБ) космический аппарат (КА) начинает вращаться с вектором угловой скорости to произвольного направления в связанной с корпусом КА системе координат (ССК). Для ориентации КА в орбитальной системе координат (ОСК) выполняются начальные режимы, где обычно выделяют этапы успокоения (остановки вращения), определения углового положения КА по внешним ориентирам, поворотных маневров для приведения ориентации КА к заданной в ОСК и поддержания такой ориентации при подготовке бортового оборудования системы управления ориентацией (СУО) для последующего выполнения основных режимов. Например, начальные режимы ориентации геостационарного спутника связи SESAT [1] выполнялись с помощью датчиков угловой скорости, приборов ориентации на Солнце и Землю, двигательной установки (ДУ) на основе реактивных двигателей (РД) малой тяги с широтноимпульсным управлением для совмещения ССК с ОСК посредством двух одноосных поворотных маневров [2] и последующей угловой стабилизации КА в ОСК при разгоне ротора силового гироскопического стабилизатора в виде реактивного двигателя-маховика (ДМ) в двухстепенном кардановом подвесе [3].
В СУО маневрирующих информационных КА (в частности, спутников землеобзора) применяются электромеханические исполнительные органы в виде избыточных кластеров крат-
Сомов Сергей Евгеньевич, научный сотрудник отдела «Динамики и управления движением».
ных схем 3-SPE (группа 3 ножничных пар – 3 Scissored Pair Ensemble ) или 2-SPE на основе соответственно трех либо двух пар двухстепенных силовых гироскопов – гиродинов (ГД) с коллинеарными осями подвеса [4,5]. Энергетические возможности системы электропитания КА в начале его миссии не позволяют выполнить одновременный разгон роторов всех ГД составе силовых гироскопических кластеров (СГК) указанных схем, доступен разгон гиророторов до номинального значения h g их собственного кинетического момента (КМ) лишь для пар ГД.
В работах [6 - 9] представлен метод разгона роторов ГД в составе таких СГК, когда оси гиророторов и угловые положения ГД относительно осей их подвеса зафиксированы в корпусе КА с помощью арретиров сразу в «парковом» состоянии (парке) СГК, которому соответствует значение вектора его КМ H = L h p = 0 при h p = 1 h p 1 = h g , где индексом p отмечен номер ГД. Здесь применяется пошаговый разгон гиророторов в циклах последовательности пар ГД, при завершении каждого такого цикла выполняется условие H = 0 . При этом проявляются инерционные возмущающие моменты из-за разгона гиророторов пар ГД и гироскопические связи каналов углового движения спутника, стабилизируемого в ОСК с помощью ДУ, естественно с расходом топлива РД.
В работе [10] предложена и исследована схема выполнения начальных режимов ориентации информационного спутника с применением бесплатформенной инерциальной навигационной системы (БИНС), корректируемой сигналами кластера звездных датчиков и навигационных систем ГЛОНАСС/GPS, двигательной установки на основе 8 РД с широтно-импульсным управлением, кластера четырех ДМ и магнитного привода с цифровым управлением. Здесь успокоение КА выполняется в инерциальной системе координат (ИСК) с помощью ДУ, далее проводятся инициализация БИНС с автономным определением как ориентации, так и расположения КА в ИСК, инициализация и включение кластера ДМ в контур управления ориентацией КА; этот режим завершается угловой стабилизацией КА в ИСК и расчетом на борту КА параметров потребного пространственного поворотного маневра КА на заданном интервале времени с краевыми условиями общего вида, который реализуется СУО с последующей угловой стабилизации спутника в ОСК.
В данной статье впервые предлагается метод разгона роторов ГД и приведения СГК кратных схем в парковое состояние без создания инерционных и гироскопических возмущающих моментов при угловой стабилизации корпуса спутника в ИСК с помощью двигательной установки. Приводятся результаты исследования процессов при разгоне роторов ГД, приведения в парк и включения СГК по схеме 3-SPE в контур управления ориентацией спутника на солнечно-синхронной орбите.
МОДЕЛИ И ПОСТАНОВКА ЗАДАЧИ
Стандартным образом вводятся ИСК, ОСК и ССК O xyz , корпус КА с фиксированным положением панелей СБ считается твердым телом с тензором инерции J . Вводятся также ортогональная каноническая система координат СГК O x g y g z g , для простоты совпадающая с ССК O xyz , и отсчет углов ГД в p относительно осей их подвеса, рис. 1. Используются обозначения col() = { • } , line() = [ • ] , ( • ) * , [ a x ] и о ,~ для векторов, матриц и кватернионов, индексы i = 1,2,3 = 1 ^ 3 для осей ССК, применяется вектор модифицированных параметров Родрига (МПР) о = { о i } = е tg( Ф /4)
собственного поворота, который однозначно связан с кватернионом Л ориентации КА в ИСК прямыми О = X / (1 + X 0) и обратными X о = (1 -о 2)/(1 + о 2) , X = 2 о /(1 + о 2) соотношениями.
Модель углового движения КА принимается в виде
■
Л = Л о ®/2 ;
Jto = -[to x]G + Mg + Me + Md.
Здесь G = J to + H является вектором КМ электромеханической СУО, где столбец H = { Н i } представляют КМ СГК; M e - вектор момента двигательной установки на основе восьми РД [9], которая обладает возможностью одновременно создавать векторы внешних сил и моментов произвольного направления в ССК за счет широтно-импульсной модуляции (ШИМ) тяги РД; вектор M g = { M g } управляющего момента СГК формируется в виде M g = — H , где ( • ) - символ локальной производной по времени, а вектор M d представляет внешние возмущающие моменты.
Каждый РД с номинальным значением тяги Pm, одинаковым для всех РД, имеет ШИМ тяги pp (t) = PmPWM( t -Te tr ,Tm ,v pr) Vt e [tr, tr+1), p = 1 ^ 8, с периодом ТЦ и временным запаздыванием Tzu. Здесь vpr является дискретным входным сигналом и функции sign v„, t e [t,t + t_ _)
PWM( t,tr, T m ,v p r ) pr r r pr/ ;
^ 0 t e [ t r + T p r , t r + 1 )
о
I v |< г pr
m ,
m
т(т)= pr m
sat(?;e,|vpr |) |vpr| > t где tr = rT, tr+i = tr + ТЦ ; r e No = [0,1,2,3...) . Вектор момента ДУ формируется по соотношению Me =E [pp x] p p (t), p = 1 ^ 8, где
— с обозначениями орта Эйлера e и угла ф и p p pp (t) = -pp (t)ep с ортом оси сопла ep
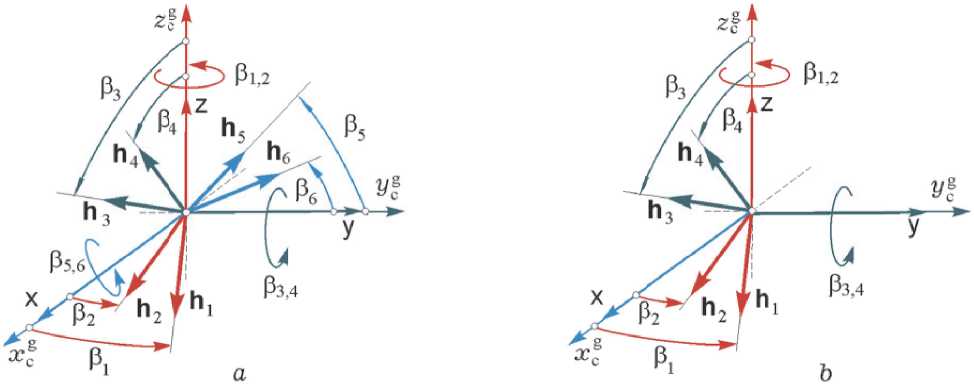
Рис. 1. Каноническая система координат СГК и отсчет углов ГД в схемах 3-SPE ( a ) и 2-SPE ( b )
вектор тяги p -го РД и радиус-вектор точки ее приложения в ССК, соответственно.
Для схемы 3-SPE (см. рис. 1 a ) введем обозначения проекций ортов КМ каждого ГД на оси системы координат O x g y g z g СГК
x1 = Cj = cos P1; x2 = C2 = cos P2; y1 = S1 = sin P1;
y2 = S2 = sin P2; x3 = S3 = sinP3; x4 = S4 = sin P4;
z 3 = C 3 = cos P 3 ; z 4 = C 4 = cos P 4 ; y 5 = C 5 = cos P 5 ;
У6 = C6 = го<; z5 = S5 = sinP5; z6 = S6 = sinP.
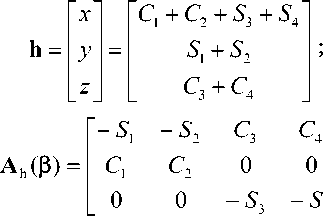
Тогда вектор нормированного КМ такого СГК
h(P) = H(P) /hg, где столбец в = {pp }, p = 1 ^ 6, и градиентная матрица Ah (в) = dh / dp пред- ставляются в виде
ПАРКОВЫЕ СОСТОЯНИЯ СГК
Вводятся обозначения xJ2 = x, + x2; x34 = x3+x4;
У 12 = У 1 + У 2 ;
|
■- S 1 |
- S - 2 |
C 3 |
C 4 |
0 |
0 " |
||
|
A h ( p ) = |
C 1 |
C- 2 |
0 |
0 |
- S 5 |
- S 6 |
• |
|
0 |
0 |
- S 3 |
- S 4 |
C 5 |
S 6 . |
||
|
Для схемы |
2-SPE |
(см. |
рис. |
1 b ) |
столбец |
||
~ x 12
y 56 y 5 + y 6 ; z 34 z 3 + z 4 ;
x 12
~
; x 34
x 34
—
z 34
z 56 = z 5 + z 6 ;
~
; y 12 =
У 12
У 56 =
У 56
—
P = { p p } , p = 1 ^ 4 и
.
Z 56
~
; z 34
z 34
; z 56
z 56
4 _
и компоненты явного векторного стройки f p ( p ) = { fp 1 , f p 2 , f p J = 0 3-SPE принимаются в виде [5]
~ _~ ~ ~ fp1(P) — x12 x34 + P(x12 x34
закона на-
СГК схемы
—
1);
f p 2(P) = У 56 — У12 +P( У56 У12
— 1) ;
При цифровом управлении СГК u k ( t ) = {u pk ( t )} с периодом Tu , где u pk ( t ) = u pk V t e [ tk , tk + 1 ) , tk + i = tk + Tu и k e N0 , когда управлением считается вектор p = u g скоростей ГД относительно осей их подвеса, кусочно-непрерывный управляющий момент СГК формируется по соотношениям
M k ( t ) = - h g A h ( p ( t ) u k ( t ) ; p ( t) = u k ( t ) • (2)
Сингулярные состояния этой схемы возникают при таких угловых положениях ГД, когда матрица Грамма G ( p ) = A h( p ) A h( p ) теряет полный ранг, т.е. при G = det( G ( p ) = 0 . Важной проблемой управления СГК избыточной структуры является выбор функции распределения вектора КМ СГК между ГД – закона настройки СГК. Наиболее рациональными [4,5] являются явные законы настройки, когда все характеристики движения ГД получаются по аналитическим соотношениям.
Задача статьи состоит в (i) определении парковых состояний СГК обеих схем при явных fp 3(P) = ~34 — ~56 +P(~34~56 — 1), где постоянный параметр p удовлетворяет условию 0 < p < 1. Данный закон настройки обеспечивает отсутствие сингулярных состояний СГК для всех внутренних точек области вариации вектора его суммарного КМ. Для представления условий однозначной разрешимости уравнения h(P) = h, где h = {x, y) z} является известным вектором-столбцом, относительно синусов и косинусов углов p всех шести гиро-динов, вводятся обозначения
Р 12 = V4 — ( x 12 ) ’ q 12 = V4 — ( У 12 ) ’
Р 34 = V4 — ( z 34 ) ; q 34 = V4 — ( x 34 ) ;
р 56 = V4— 1 у 5« >2; q 56 = V4— < z 56 >2;
, .x l^ x-, .x Z^ x-, =у 1^ у. x 12 2 ’ x 34 2 ’ x 56 2 ’
У — A У . - Z + A z . - z — A z , y12 2 ’ z34 2 ’ z56 2 ’ dx = Чп+p34’ dy = q56+Р12’ dz = q34+p56.
Условия разрешимости векторного уравне- ния h(P(t) = h(t)
имеют вид
A , - d x {1 - [1 - 4 p (( q ^ - p M)( x /2)
+ p ( q^p 34 - ( x /2) 2 ))/ d 2]1/2 }/ p ’
A y - dy {1 - [1 - 4 p (( q 56 - p i2 )( y /2)
+ p ( q 56 P 12 - ( y /2)2))/ d 2]1/2}/ p ’
A z - d z {1 - [1 - 4 p (( q 34 - p 5б )( z /2)
+ p(q34P56 -(z/2)2))/dzT2}/p и при введении столбца А = {Ax, А , Az} очевидным образом преобразуются к нелинейному векторному уравнению А = Ф(h, А). Получить аналитическое решение этого уравнения для определения углов Pp ГД при парковом состоянии СГК весьма затруднительно, но его численное решение достигается практически мгновенно по методу простой итерации – при рациональном выборе начального точки достаточно лишь 2-3 итераций для получения результата с приемлемой точностью.
Далее при введении обозначений
X + A x . 3 У - A y . _ I 2 , ,2 .
a 1 2 ’ b 1 2 ’ c 1 ^a 1 + b 1 ’
П. Г, _ z + A_ , x -AT _ d 1 V4 c1 / c1 ’ a 2 2 ’ b2 2 ’
/-; 2 2 y + A y c 2 — Va 2 + b 2 ’ d 2 — V 4 - c 2 / c 2 ’ a 3 — 2 ’ b3 = z 2 z ; c 3 - Vа 2 + b3 ^ d 3 - V 4 - c2 / c 3
вычисление синусов и косинусов углов в р всех шести ГД выполняется по явным аналитическим соотношениям
1-я пара (ГД1 и ГД2):
_ ai - dibi _ bi + di ai , xi ~ ;y 1 ~ ;
|
x 2 |
a 1 + d 1 b 1 |
b r |
- d 1 a 1 |
|
= 2 ; y 2 = |
2 ; |
||
|
2-я пара (ГД3 и ГД4): |
|||
|
x 3 |
_ b 2 + d 2 a 2 _ „ _ |
a 2 |
- d 2 b 2 |
|
= 2 ; z 3 = |
2 |
||
|
x 4 |
_ b 2 - d 2 a 2 _ _ _ |
a 2 |
+ d 2 b 2 |
|
= 2 ; z 4 = |
2 |
||
|
3-я |
пара (ГД5 и ГД6): |
||
|
a 3 - d 3 b 3 |
b 3 |
+ d 3 a 3 |
|
|
y 5 |
= „ ; z3 = 2 5 |
2 |
|
|
_ a 3 + d 3 b 3 _ _ _ |
b 3 |
- d 3 a 3 |
|
|
y 6 |
= 2 ; z 6 = |
. 2 |
|
Положение нечетных ( p = 1,3,5) и четных ( p = 2,4,6) ГД в трех парах i = 1 ^ 3 удобно представить углами a i = ( Р 2 i - 1 + P 2J /2 и 5 i = ( Р 2 i - 1 - Р 2 i ) / 2 , i = 1 ^ 3 , которые поясняют применяемое выше наименование «ножничной пары» - угол a i определяет центральную линию ai «ножниц», а углы ± 5 i - положения векторов КМ h 2 i - 1 и h 2 i относительно линии ai в i -ой паре ГД.
Парковое состояние СГК по схеме 3-SPE приведено на рис. 2 a . Здесь векторы КМ всех 3 пар ГД h i = h 2 i - 1 + h 2 i с одинаковыми модулями и концами в точках A , B и C принадлежат плоскости P , которая содержит начало системы координат СГК, причем векторы h i направлены по линиям ai .
Для СГК по схеме 2-SPE при скалярном законе настройки f p 1 ( Р ) = х12 - х34 + p (x12x34 - 1) - О аналитическое решение, представленное первым соотношением в (3), зависит параметра р . Парковое состояние этой схемы приведено на рис. 2 b , где не показаны центральные линии a 1 и a 2 двух ножничных пар, которые определяются углами a 1 = 0 и a 2 = п , а также углы 5 1 = 5 2 в парах ГД.
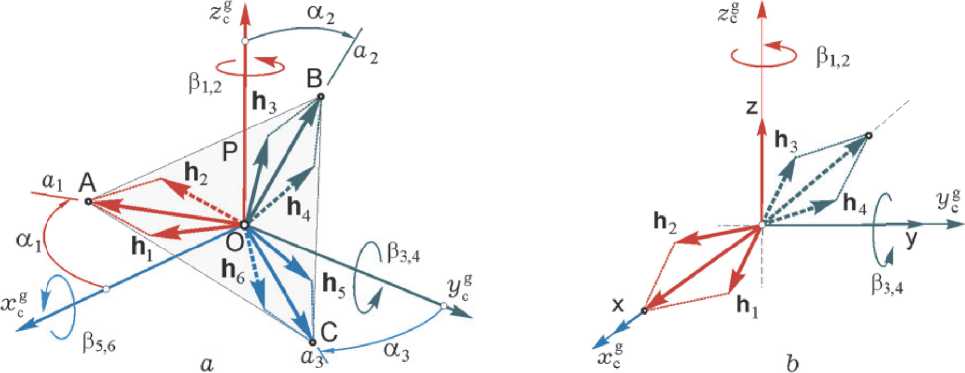
Рис. 2. Парковые состояния СГК кратных схем 3-SPE ( a ) и 2-SPE ( b )
НАВЕДЕНИЯ И УПРАВЛЕНИЕ КА ПРИ ОРИЕНТАЦИИ СБ НА СОЛНЦЕ
После окончания режима успокоения КА (остановки его вращения с точностью ≈ 0,05 град/с), включения БИНС с определением ориентации КА, его расположения в ИСК, а также положения Солнца, замыкания контура стабилизации углового положения КА с широтноимпульсным управлением ДУ и завершения переходных процессов далее на некотором интервале времени t е [ t i p , t f ] должен выполняться разворот спутника в такое положение, при котором нормаль к плоскости панелей СБ направлена на Солнце. Соответствующий закон пространственного углового наведения КА в ИСК синтезируется на основе простой кинематической модели
Лp = Лp оюp/2 ; op = ep
с заданными краевыми условиями
Л p ( t i p ) = K p ; to p ( t i p ) = 0 ;
Л p ( t f p ) = Л p ; to p ( tp ) = 0
и ограничениями на модули вектора угловой скорости to p ( t ) и кусочно-постоянного вектора углового ускорения е p ( t ) . В результате получается угловое наведение КА по кратчайшему пути – при кватернионе разворота Л ’ ( 1 0 , 1 * ) = Л Р о Л p программное угловое движение КА представляется его вращением вокруг орта е * = 1 * / sin( ф * /2) оси Эйлера на угол ф * = 2 arccos( X * ) .
Если задано программное угловое движение КА Л p ( t ), го p ( t ), e p ( t ) = Ю p ( t ) - закон его углового наведения в ИСК, то кватерниону рассогласования E = ( e 0 , e ) = Л p о Л с вектором e = { ei } соответствует вектор параметров Эйлера E = { e о , е } , матрица C e( E = 1 3 - 2[ e x ] Q 0 , где Q e = I 3 e 0 + [ e x ] , и вектор погрешности ориентации 5 ф = {5ф i } = { 2 e 0 ei } .
После дискретной фильтрации измеренных БИНС с периодом Tq значений вектора углового рассогласования е l = - 2 e 0 l е l , l е N0 , формируются значения вектора е f , r е N0 , дискретного закона широтно-импульсного управления ДУ с периодом T U :
g r + 1 = Bg r + C s 0 ; m r = Kg r + P e 0; (5) M ' = o r x J o r + J ( C r e p + [ C> p х ] ю r + m r ).
Здесь матрица Ce = Ce(Er) и используются диагональные матрицы K , B , C и P . Далее импульс вектора потребного момента ДУ «пересчитывается» в столбец длительностей Tr = {тpr} включения РД Vt е [tr, tr+1), кото- рые используются при ШИМ тяги всех восьми РД с формированием вектора управляющего момента Mr( t) = E [pp x] pp (t) двигательной установки.
РАЗГОН РОТОРОВ И ПРИВЕДЕНИЕ СГК В ПАРКОВОЕ СОСТОЯНИЕ
Для СГК по схеме 3-SPE в плоскости изменения КМ каждой i -ой паре ГД введем линии bi , ортогональные линиям ai , см. рис. 3 a , и будем считать, что направления осей роторов нечетных ( p = 1,3,5) и четных ( p = 2,4,6) ГД в парах i = 1 ^ 3 зафиксированы в корпусе КА с помощью арретиров по линиям bi при углах ГД относительно осей их подвеса в 2 i - 1 = в 2 i — п , так как согласно применяемой стратегии отсчета углов гиродинов нечетные ГД в парах всегда перемещаются впереди четных, см. рис. 1 и рис. 3 a .
При последовательном разгоне роторов в парах ГД с одинаковыми ускорениями вплоть до номинального значения h g их собственных КМ инерционные возмущающие моменты таких гиророторов компенсируются. Поэтому в результате КМ роторов всех шести ГД принимают значения h g без влияния их инерционных возмущающих моментов на угловое движение корпуса КА и при отключении арретиров гиродинов СГК становится готовым для приведения в парк.
При развороте двух ГД c противоположными векторами КМ в i -ой паре в разные стороны с одинаковыми скоростями относительно осей подвеса создаваемые ими гироскопические моменты складываются и вектор КМ h i ( t ) этой пары ГД изменяется вдоль центральной линии ai , см. рис. 3 b . Поэтому в процессе приведения СГК в парк с условиями Н ( t ) = 0 и M g( t ) = - Н ( t ) = 0 рационально выполнять указанные развороты векторов КМ гиродинов во всех трех парах одновременно в следующей последовательности: 1) все шесть ГД разворачиваются в соответствующих направлениях с одинаковыми постоянными угловыми скоростями до значений их углов в 2 / ._ 1 = e 2 i — i - X , e 2 i = e 2 i + X в парах i = 1 ^ 3 с заданным постоянным углом χ , далее принимается χ = 1 град; 2) задается потребный управляющий гироскопический момент СГК M g ^ 0 и включается закон его настройки, который автоматически приводит СГК точно в парковое состояние.
Для СГК по схеме 2-SPE разгон гиророторов и приведение к парковому состоянию на рис. 2 b выполняется аналогичным способом. Здесь линия b1 , ортогональная центральной линии а 1 первой пары, параллельна оси O y g , а линия b 2 параллельна оси Oz g системы координат СГК O x cg y cg z cg .
ВКЛЮЧЕНИЕ КЛАСТЕРА ГД В КОНТУР УПРАВЛЕНИЯ
После дискретной фильтрации значений f углового рассогласования вектор 8k применяется в цифровом законе управления СГК gk+1 = Bgk + Сек; т k = Kg к + Рек;
М 8 = tok х G ° + J (С 8 p + [С: to p x]tok + тД к к к к к к к к к где Gk = Jtok + Hk. Далее вектор потребного цифрового управления СГК Mgk с помощью явного закона распределения команд между шестью ГД «пересчитывается» в столбец uк = {ufk } сигналов управления ГД, которые фиксируются на полуинтервалах цифрового управления СГК с периодом Tu для формирования управляющего момента Mgk(t) (2), детали представлены в [11].
РЕЗУЛЬТАТЫ ИМИТАЦИИ сой m = 1000 кг и тензором инерции J = diag{812; 587; 910} кг м2 на солнечно-синхронной орбите (ССО) высотой 720 км. Пусть при широтно-импульсном управлении с периодом TU = 4 с каждый из восьми РД в составе ДУ имеет максимальное значение тяги Pm = 0.5 Н, а каждый из шести ГД в составе СГК имеет модуль собственного КМ hg = 100 Нмс и период цифрового управления Tu =1 0.25 с. Будем считать, что к моменту времени t = ti = 7000 с завершен режим успокоения КА, с помощью БИНС определяются ориентация КА и его расположение в ИСК, а также положение Солнца, и на интервале времени t е [7000,7600] с выполняется угловая стабилизация КА в ИСК при широтноимпульсном управлении двигательной установкой. Закон углового наведения КА на интервале времени t е[ tip, tf ] = [7600,8548] с для совмещения нормали к панелям СБ с направлением на Солнце при итоговом развороте корпуса КА вокруг оси Эйлера на угол ф* =76.6 град представлен на рис. 4. Здесь приведены программные значения компонентов векторов углового
При компьютерной имитации рассматривался информационный спутник с мас-
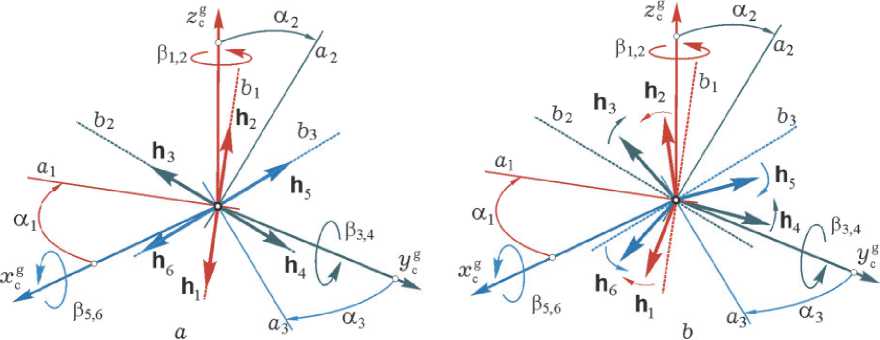
Рис. 3. Разгон роторов в 3 парах ГД ( a ) и приведение СГК схемы 3-SPE в парковое состояние ( b )
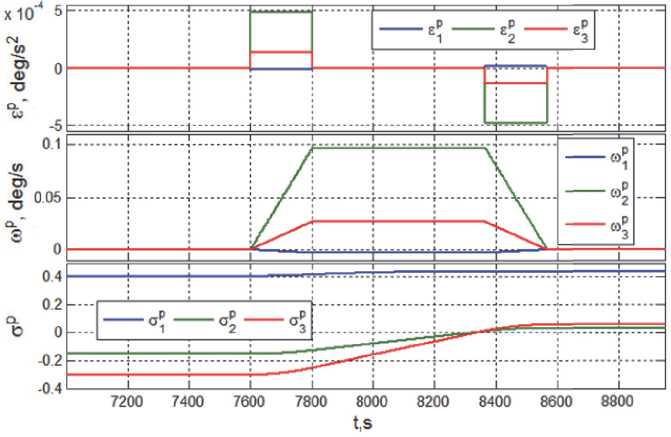
Рис. 4. Начальное положение и программное угловое движение КА при наведении панелей СБ на Солнце
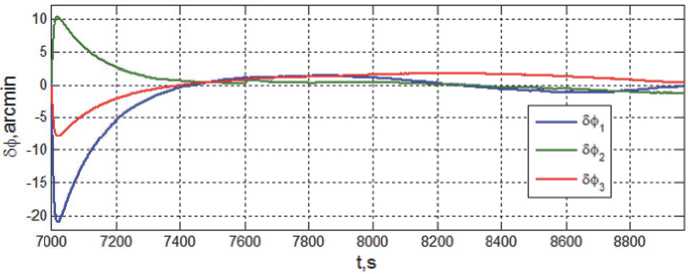
Рис. 5. Ошибки стабилизации начального положения и движения КА при наведении панелей СБ на Солнце
ускорения ε p ( t ) и угловой скорости ω p ( t ) , а также компонентов вектора модифицированных параметров Родрига σ p ( t ) . Достигаемые при этом ошибки стабилизации движения КА приведены на рис. 5.
В момент времени t = t f p = 8548 с начинается длительный режим угловой стабилизации КА с панелями СБ, ориентированными на Солнце. Здесь на интервале времени t ∈ [8548, 14428] с попарно разгоняются роторы шести ГД без возникновения реактивных возмущающих моментов от этих гиророторов при стабилизации углового положение корпуса спутника в ИСК с помощью широтно-импульсного управления ДУ. В момент времени t = 14428 с положение векторов КМ с модулями h g = 100 Нмс в парах ГД определяется углами β o 2 i - 1 = 45 град и β o 2 i = –135 град, i = 1 ÷ 3 .
При значении параметра ρ = 0.65 и парковом состоянии СГК по схеме 3-SPE углы β p ГД имеют значения β * 2 i - 1 = 15.661816459787 град, β * 2 i = - 105.661816459787 град, i = 1 ÷ 3 , что приводит к симметричным значениям углов a i = -45 град и 5 i = 60.661816459787 град для ножничных пар.
На интервале времени t ∈ [14428, 14488] с все шесть ГД разворачиваются в соответствующих направлениях с одинаковыми постоянными угловыми скоростями, что дает соблюдение условий Н (t) = 0 и Mg (t) ≡ 0 . В результате углы β p ГД принимают значения βˆ2i-1 = 14.661816459787 град, Ргi =-104.661816459787 град, г = 1 ^ 3, которые сохраняются до момента времени t = 14528 с, когда включается закон настройки СГК с условием Mg ≡ 0 . В течение 20 секунд на интервале времени t ∈ [14528, 14548] с указанный закон настройки приводит СГК точно в парковое состояние.
Начиная с момента времени t = 14548 с широтно-импульсное управление двигательной установки отключается и в контур угловой стабилизации спутника в ИСК включается СГК с цифровым управлением. Следует отметить, что структуры законов широтно-импульсного управления ДУ (5) и цифрового управления СГК (6) близки, но аналитические соотношения для расчета диагональных элементов матриц K , B , C и P существенно отличаются.
Изменения углов β p нечетных ГД ( p = 1,3,5) при завершении приведения СГК в парк и включении его в контур управления представлены на рис. 6, а углов β p четных ГД ( p = 2,4,6) – на рис. 7.
Ошибки стабилизации КА в ИСК по углам 5ф i и угловым скоростям 5w i на интервале времени t ∈ [14548, 14648] с при включении СГК в контур цифрового управления приведены на рис. 8.
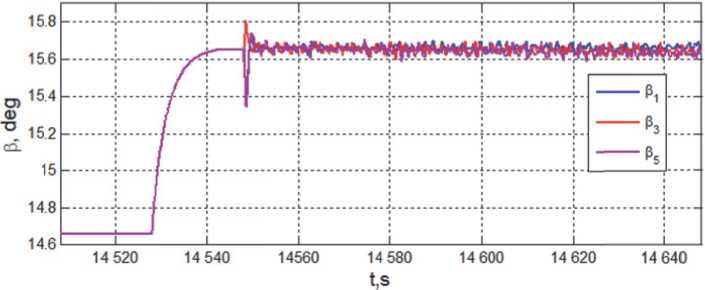
Рис. 6. Углы ГД при завершении приведения СГК в парк и включении его в контур управления
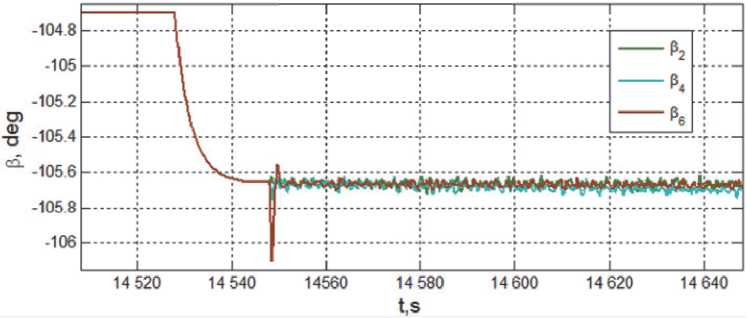
Рис. 7. Углы ГД при завершении приведения СГК в парк и включении его в контур управления
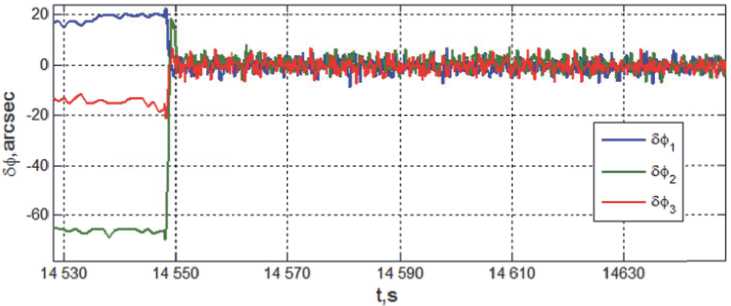
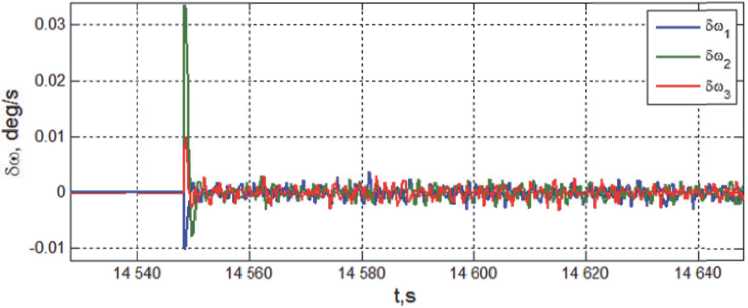
Рис. 8. Ошибки угловой стабилизации КА при включении СГК в контур управления
ЗАКЛЮЧЕНИЕ
Разработан новый метод разгона (увеличения скоростей вращения) роторов гироди-нов и приведения силовых гироскопических кластеров (СГК) двух кратных схем в парковое состояние без создания инерционных и гироскопических возмущающих моментов при угловой стабилизации корпуса спутника в ИСК с помощью двигательной установки. В этом методе учитывается ограниченность энергетических ресурсов системы электропитания КА в начале его миссии, гиророторы разгоняются до номинального значения их собственного КМ последовательно по парам ГД. При этом возникает большая длительность разгона роторов всех гиродинов (несколько часов) при угловой стабилизации КА с панелями СБ, ориентированными на Солнце. Отсутствие возмущающих моментов в процессе такой инициализации СГК приводит к экономичности работы ДУ в отношении расхода топлива при длительной угловой стабилизации КА в ИСК.
Представлены методика определения парковых состояний СГК обеих схем при явных законах их настройки, разработанные алгоритмы углового наведения и управления ориентацией КА с помощью ДУ при переводе ориентации спутника в такое состояние, при котором нормаль к плоскости панелей СБ направлена на Солнце. Приведены результаты компьютерной имитации динамических процессов при включении СГК в контур цифрового управления ориентацией спутника.
Список литературы Разгон гиророторов и включение избыточного кластера гиродинов в контур управления ориентацией информационного спутника
- Nonlinear dynamics of gyromoment attitude control system at communication satellite SESAT/Ye.I. Somov, S.A. Butyrin, V.A. Rayevsky, G.P. Titov, A. Baiget, R.C. Rogers//Proceedings of 5th IFAC Symposium "Nonlinear Control Systems". 2001. Vol. 3. P. 1399-1404.
- Сомов С.Е. Анализ колебаний конструкции спутника при наведении на Солнце и Землю с широтно-импульсной модуляцией управления двигателями//Известия Самарского научного центра РАН. 2007. Т. 9. № 3. С. 847-858.
- Сомов С.Е. Динамика начальных режимов упругого геостационарного спутника с широтно-импульсным управлением двигателями и разгоном ротора силового гироскопического стабилизатора//Гироскопия и навигация. 2006. № 4(55). С. 100.
- Platonov Steering the spacecraft control moment gyroscope clusters/Ye.I. Somov, S.A. Butyrin, A.V. Sorokin, V.N.//Proceedings of 10th Saint-Petersburg International Conference on Integrated Navigation Systems. 2003. P. 403-419.
- Сомов Е.И. Анализ сингулярных состояний и синтез явных законов настройки гирокомплексов кратных схем//Гироскопия и навигация. 2013. № 1(80). С. 134-148.
- Somov S.Ye. Guidance and robust pulse-width control of an information satellite at initial modes//Proceedings of 18th IFAC Symposium on Automatic Control in Aerospace. 2010. P. 302-307.
- Somov S., Butyrin S. Guidance and robust pulse-width control of an information satellite at initial, service and emergency modes//Proceedings of 18th IFAC World Congress. 2011. P. 2072-2077.
- Somov S. Spacecraft attitude pulse-width control at initial, service and emergency modes//AIP Conference Proceedings. 2012. Vol. 1493. P. 933-940.
- Somov S. Pulse-width attitude control of large-scale information satellite at service modes//Proceedings of 19th IFAC Symposium on Automatic Control in Aerospace. 2013. P. 7-12.
- Сомов Е.И., Бутырин С.А. Наведение и управление ориентацией информационного спутника в начальных режимах//Аналитическая механика, устойчивость и управление. Труды XI международной Четаевской конференции. Том 3. Секция 3. Управление. Ч. III. Казань: КНИТУ-КАИ. 2017. С. 41-52.
- Сомов Е.И., Бутырин С.А. Полетная идентификация и силовая гироскопическая стабилизация слабо демпированной конструкции крупногабаритного спутника//Проблемы управления. 2013. № 2. С. 51-57.
