Разработка алгоритмов функционирования системы управления безопасностью полета летательного аппарата вертолетного типа

Автор: Большаков Александр Афанасьевич, Кулик Алексей Анатольевич, Сергушов Игорь Викторович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 1-2 т.18, 2016 года.
Бесплатный доступ
В работе рассматривается система управления безопасностью полета вертолета, ее состав и взаимодействие с сопрягаемым оборудованием. Приводится классификация отказных ситуаций бортового радиоэлектронного оборудования летательного аппарата вертолетного типа. Получены алгоритмы, позволяющие выполнить распознавание, прогнозирование и оповещение летного экипажа о наступлении критического режима управления летального аппарата. Отличительной особенностью предложенного алгоритма является синтез методов искусственного интеллекта при его реализации.
Система управления, безопасность полета, искусственный интеллект, алгоритм
Короткий адрес: https://sciup.org/148204395
IDR: 148204395 | УДК: 681.5
Development the control system algorithms functioning of flight safety for the aircraft of helicopter type
In paper the flight safety control system of the helicopter, its structure and interaction with the interfaced equipment is considered. Classification of negative situations of the onboard radio-electronic equipment of the aircraft of helicopter type is given. The algorithms allowing to execute recognition, forecasting and notification of flight crew about approach of critical control mode of the flying device are received. Distinctive feature of the offered algorithm is synthesis the methods of artificial intelligence at his realization.
Текст научной статьи Разработка алгоритмов функционирования системы управления безопасностью полета летательного аппарата вертолетного типа
сигналов в критические системы управления (САУ и СДУ) формирует высокие требования к надежности системы поддержки экипажа и корректности передаваемой информации. Также информация об условиях полета летательного аппарата передается летному экипажу через различные средства оповещения, которыми являются приборы индикации и сигнализации на борту воздушного судна: многофункциональный индикатор (МФИ), центральный сигнальный огонь (ЦСО), звуковые и речевые информаторы, светосигна-лизаторы. Наиболее часто применяется информация, выдаваемая на МФИ, звуковые и светосигнализирующие устройства. Информация, формируемая речевыми трансляторами, имеет ограниченное применение, т.к. содержит констатирующие и указывающие предложения. В качестве примера рассмотрим следующее событие: заклинивание руля высоты, тогда речевая информация имеет вид: «Руль высоты заклинен. Расцепку секций включи» [3]. При этом она дублируется на других устройствах индикации и оповещения.
Таким образом, создание и совершенствование систем обнаружения изменений условий управления авиационной техникой и прогнозирование их влияния на объект управления с выдачей информации в устройства индикации и предупреждения является важной задачей в обеспечении безопасности управления летательным аппаратом.
Цель работы: разработка алгоритмического обеспечения СУБ полета летательного аппарата вертолетного типа, отличающегося синтезом методов нечеткой логики и экспертных систем, что позволит осуществить программно-аппаратную реализацию системы, исследовать ее функционирование и воздействие на сопрягаемое бортовое радиоэлектронное оборудование.
Для достижения поставленной цели необходимо решить следующие задачи:
-
1. Выполнить структурный анализ СУБ полета летательного аппарата вертолетного типа.
-
2. Разработать алгоритмы функционирования СУБ полета летательного аппарата вертолетного типа.
Структурный анализ СУБ полета летательного аппарата вертолетного типа. СУБ полета вертолета, представляет совокупность программно- аппаратных устройств, установленных на борту летательного аппарата. Взаимодействие устройств СУБ направлено на обнаружение изменения условий эксплуатации летной техники, оценку и прогнозирование их влияния на устойчивость и управляемость воздушным судном, а также выдачу информационно-уп-равляющих сигналов для средств оповещения летного экипажа и систем управления. При этом оценка изменений условий эксплуатации летной техники должна осуществляться по информации, характеризующей изменение внутренних и внешних воздействующих факторов на объект управления в режиме реального времени. Структурная схема СУБ полета летательного аппарата представлена на рис. 1.
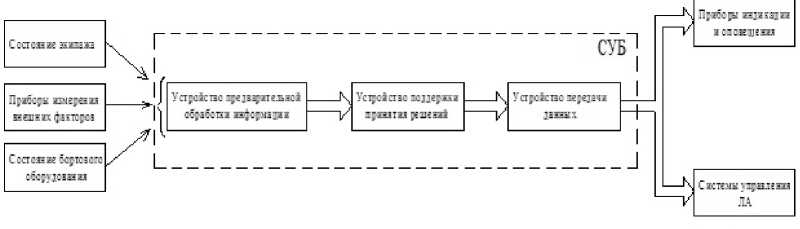
Рис. 1. Структурная схема СУБ вертолета
Из рисунка видно, что ядром СУБ полета вертолета являются устройства предварительной обработки данных, поддержки принятия решений и передачи данных. Предварительная обработка данных заключается в получении системой информационно-измерительных данных от комплекса бортового оборудования летательного аппарата и формировании электрических сигналов, характеризующих превышение заданных переменных воздействующих факторов на объект управления. Затем на базе информации об изменении условий полета летательного аппарата устройство поддержки принятия решений формирует вывод, характеризующий опасность полетного события и способы его устранения. Полученный вывод передается в устройство передачи данных, которое формирует электрические сигналы, поступающие на вход приборов индикации и оповещения, а также, при необходимости, в системы управления летательным аппаратом. Предложенная СУБ полета благодаря двухуровневому распознаванию изменения условий эксплуатации воздушного судна позволяет исключить ложное формирование данных о летном происшествии и его последствиях. Вычислительным ядром системы может являться программно-логические интегральные схемы, а также преобразующие устройства, тип которых зависит от вида интерфейсов обмена данными системы с периферийными устройствами комплекса бортового оборудования воздушного судна.
Команды, поступающие в системы управления летательным аппаратом, относятся к ограничивающим и не должны приводить к ухудшению управляемости и устойчивости полета летательного аппарата. Кроме контроля сигналов формируемых системой, в процессе её разработки должны быть предусмотрены средства повышения её надежности. Другой важной особенностью её проектирования является применение в качестве программного комплекса средств искусственного интеллекта, что позволит адаптировать её функционирование к изменению пространственно-временной информации в режиме реального времени. Примерами средств искусственного интеллекта являются алгоритмы нечеткой логики, нейронные сети и экспертные системы, которые реализуются в системе на основе совместного алгоритмического и программного обеспечения [4, 5]. Так, устройства предварительной обработки информации реализуют алгоритмы нечеткой логики, при этом устройство поддержки принятия решений содержит модули прогнозирования, характерные для гибридных экспертных систем.
Особенностью СУБ полета летательного аппарата вертолетного типа (ЛАВТ) является наличие детерминированных и не детерминированных входных переменных, получаемых от сопрягаемого бортового радиоэлектронного оборудования (БРЭО). При этом детерминированные переменные представляют собой четко определенные значения во всем временном интервале эксплуатации авиационной техники, характеризующие программное и аппаратное состояние ее устройств и систем. В то время как не детерминированные переменные являются слабо формализуемыми значениями, распределенными в пространстве и времени. Например, наличие / отсутствие отказа устройств и систем БРЭО представляют собой детерминированное значение. Примером не детерминированной переменной является значение реакции объекта управления на возмущающее воздействие, формируемое его системой управления и влияющей на его управляемость.
Предложенная СУБ полета вертолета достаточно успешно и достоверно может определить угрозу наступления летного происшествия, спрогнозировать её последствия и сформировать рекомендации пилоту по её устранению. Также система передает в СУ летательным аппаратом сигналы, которые могут быть учтены в процессе ограничения расходов его управления и реконфигурации оборудования.
Разработка алгоритмов функционирования СУБ полета ЛАВТ. Основным этапом проектирования сложных технических систем является разработка их программно-алгорит-мического обеспечения, которое используется при реализации принципа действия проектируемой системы и ее взаимодействия с сопрягаемым оборудованием. Согласно структурной схеме СУБ полета ЛАВТ алгоритм должен содержать следующие основные этапы: инициализация значений первичного сигнала; предварительная обработка входных данных: распознавание вида летного происшествия и его последствия; передача полученных результатов в системы управления и оповещения. Тогда блок схема алгоритма функционирования СУБ полета имеет вид, представленный на рис. 2.
Согласно представленной схеме, СУБ полета ЛАВТ функционирует следующим образом:
Блок 1. Получение и инициализация входных данных от сопрягаемых систем и устройств бортового радиоэлектронного оборудования (БРЭО).
Блок 2. Предварительная обработка входных данных системы.
Блок 3. Выполняется распознавание типа отказа, его параметры и последствия [6].
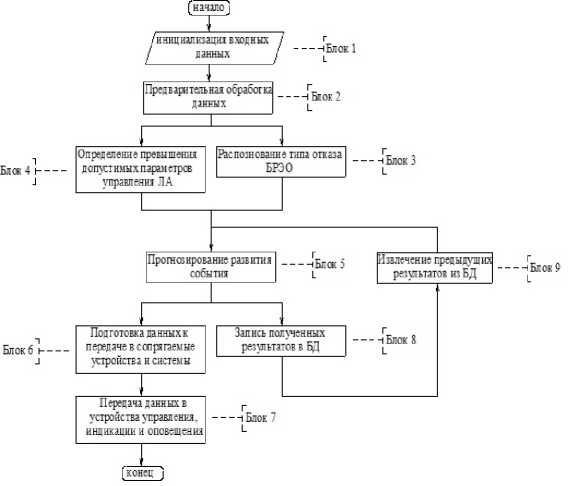
Рис. 2. Блок-схема алгоритма функционирования СУБ: БРЭО – бортовое радиоэлектронное оборудование; БД – база данных
Блок 4. Определяется наличие превышения допустимых параметров управления летательным аппаратом по внешним и внутренним воздействующим факторам на объект управления.
Блок 5. Осуществляется прогнозирование развития летного происшествия и его исключение на базе набора правил, определяющих его наличие и влияние на управление летательным аппаратом.
Блок 6. Подготовка результатов прогнозирования развития летного происшествия (его наличие / отсутствие), данных характеризующих отказ бортового оборудования и превышение допустимых параметров управления летательным аппаратом для передачи в сопрягаемые с СУБ системы и устройства.
Блок 7. Выполняется передача полученных результатов в устройства индикации, оповещения и системы управления летательным аппаратом.
Блок 8 Запись результатов прогнозирования развития летного происшествия (его наличие/отсутствие), данных характеризующих отказ бортового оборудования и превышение допустимых параметров управления летательным аппаратом для передачи в базу данных СУБ.
Блок 9. Извлечение и применение информации базы данных СУБ в процессе прогнозирования развития летного события.
Стоит отметить, что предварительной обработкой входных данных СУБ полета ЛАВТ является процедурой преобразования входного сигнала в логическую составляющую и определение его заданного значения с использованием метода нечеткой логики. Преобразование входного сигнала к логическому значению достигается применением аппарата нормировки и перехода к безразмерной в6еличине. Блок схема алгоритма предварительной обработки информации, представлена на рис. 3. Согласно представленной блок-схеме алгоритм предварительной обработки данных содержит следующие основные этапы:
Блок 1. Инициализация входных переменных СУБ.
Блок 2. Определение типа входной переменной системы (детерминированная и не детерминированная).
Блок 3. Если переменная детерминированная, то осуществляется переход к блоку 4. Иначе выполняется операция по обработке входных данных по блоку 5.
Блок 4. Обработка входных данных выполняется в соответствии с методами нечеткой логики, что позволяет определить превышение заданного значения входной переменной на базе известного набора правил.
Блок 5. Если переменная является детерминированной, то выполняется ее нормировка и переход к безразмерной величине.
Блок 6. Осуществляется сравнение входного значения контролируемого параметра с заранее заданным.
Блок 7. Выполняется формирование результатов обработки входных данных СУБ в виде массива логической информации применяемой в процессе распознавания наступления летного происшествия, его прогнозирования и исключения.
Особенностью применения аппарата нечеткой логики является возможность обрабатывать не детерминированные входные данные принадлежащих определенному множеству в соответствии с набором нечетких правил. Основные этапы обработки данных методом нечеткой логики составляют операции: фаз-зификации (определение принадлежности переменной x множеству M(x)), обработка данных по имеющемуся набору правил, дефаззификация (физическое представление выходной нечеткой переменной). Основное преимущество операций нечеткой логики заключается в возможности обрабатывать с высокой скоростью и точностью большой объем данных распределенных на временном участке [0: T ] и принадлежащих слабо формализуемому множеству M(x), характеризующему параметры сложно-технической системы.
Согласно полученным алгоритмам СУБ полета ЛАВТ, математическая модель ее вычислительного ядра представляет комплекс, описывающий вычислительные процессы, протекающие в системе и ее взаимодействие с сопрягаемым оборудованием. Известно, что СУБ полета предназначена для распознавания аварийных ситуаций на борту воздушного судна, вызванных внутренними и внешними воздействующими факторами, она также осуществляет прогнозирование развития событий с выдачей информации о состоянии и изменении объекта управления пилоту. Поэтому в состав модели должны входить переменные, характеризующие изменение условий полета вертолета (скорость, высота, угловые и линейные ускорения, положение объекта управления относительно систем координат, частота вращения несущего винта, погодные условия и. т.д.); состояние бортового оборудования и пилота. Выходными переменными модели являются выводы экспертной системы, поступающие на информационные устройства. При этом входные переменные описываются точными числовыми значениями и сравнительными величинами качественными (хорошо, плохо, среднее, высокое, низкое).
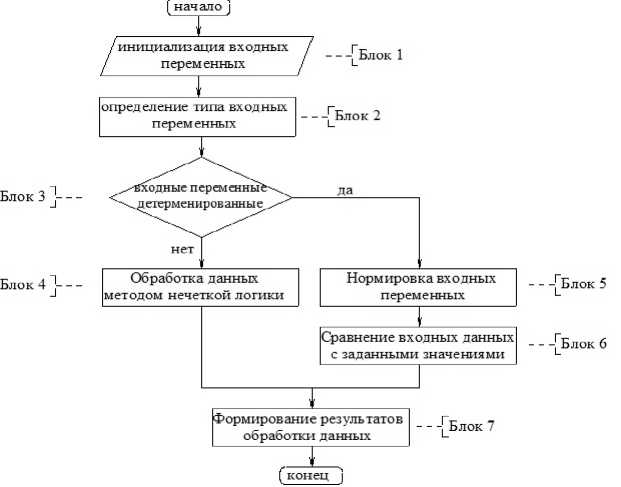
Рис. 3. Блок-схема предварительной обработки данных СУБ
Выражение нормировки точных значений входных переменных имеет следующий вид:
2„(0 = ^"^Az > О,
Ех “-татах
(1) где u®(t) - значение переменной величины, характеризующей состояние объекта управления, ;•:,.. ..... - максимальное значение входной величины, 7 ■:...■ 7,: -безразмерная величина измеряемой переменной.
В результате проведения расчетов изменение входных переменных будут находиться в диапазоне [0;1]. При этом в него также войдут граничные значения перехода событий, относительно которых формируется набор правил принятия решений. Таким обра- зом, математическая модель вычислительного ядра СУБ полета вертолета, позволяющей распознать и
Согласно полученным алгоритмам СУБ полета ЛАВТ, математическая модель ее вычислительного ядра представляет комплекс, описывающий вычислительные процессы, протекающие в системе и ее взаимодействие с сопрягаемым оборудованием. Известно, что СУБ полета предназначена для распознавания аварийных ситуаций на борту воздушного судна, вызванных внутренними и внешними воздействующими факторами, она также осуществляет прогнозирование развития событий с выдачей информации о состоянии и изменении объекта управления пилоту. Поэтому в состав модели должны входить переменные, характеризующие изменение условий полета вертолета (скорость, высота, угловые и линейные ускорения, положение объекта управления относительно систем координат, частота вращения несущего винта, погодные условия и. т.д.); состояние бортового оборудования и пилота. Выходными переменными модели являются выводы экспертной системы, поступающие на информационные устройства. При этом входные переменные описываются точными числовыми значениями и сравнительными величинами качественными (хорошо, плохо, среднее, высокое, низкое).
спрогнозировать последствия летного происшествия приметвид:
fi„(t) = "^/и > °,
' ^вхтах
«2(0 = f(«2 (0,^(0), «з(0 = f («з(0,йз(0), «„(t) = ))й«))а1№)>
'- = ■:<:7;.:;::7?.;:7? . ^у-;; (2)
ие г^И); iMt); .. „• U^t) - переменные, характеризующие соответствие измеряемых переменных заданным требованиям; 7.7 :. - 7 . :. . :
- нормированные значения измеряемых переменных;
й№ й»(0;....;й®0) – заданные значения входных переменных системы, характеризующие изменение граничных значений состояния объекта управления; у(е) – переменная, характеризующая функцию принятия решения вычислительного ядра СУБ.
Следующим этапом моделирования является математическое описание формирования управляющего информационного сигналов вычислительного ядра, поступающего в сопрягаемое оборудование.
(^упрСО^инфСО) = №(0,0,
У(1) = У(()-ипр,
где иупр(О,иннф(£) – управляющие и информационные сигналы выдаваемые системой, y(t) – переменная функция принятия решения, “1ф – величина преобразования переменной в размерную величину, которая зависит от характеристик вычислительного устройства системы.
Из математической модели (1) – (3) и алгоритмов системы видно, что ее особенностью является формирование переменных состояния условия управления воздушным судном и прогнозирование их развития. Характерной чертой применения математического аппарата нечеткой логики и экспертной системы является формализованная запись событий влияющих на управление летательным аппаратом, а также формирование сигнала системы принятия решений. Кроме формализации записи переменных в аппарате применяется набор правил, характеризующийся процедурой сравнения текущего состояния условий полета с заданными.
В качестве примера алгоритмов функционирования СУБ полета ЛАВТ рассмотрим следующую задачу: пусть в процессе эксплуатации летательного аппарата в интервал времени [£±! £г! произошел явный отказ датчиков воздушных сигналов, углового положения и вычислительного элемента системы автоматического управления вертолета. Тогда разовые команды, характеризующие отказ элементов комплекса бортового оборудования воздушного судна и поступающие на вход системы управления безопасностью полета, имеют следующий вид:
^ВС(О = 1'"ду(О = ^«вмСО = 1,где te [ti; t2],
Подставляя переменные из выражения (4) в формулы (2) – (3), получим:

Из решения видно, что система формирует информационный сигнал, характеризующий потерю управляемости летательным аппаратом до второго уровня [6].
Выводы: разработаны основные подходы к алгоритмическому обеспечению СУБ полета ЛАВТ с использованием методов искусственного интеллекта, позволяющие произвести распознавание предпосылок к летному происшествию, оценить его последствия и исключить его наличие. Также в работе приводится математическое описание работы вычислительного ядра системы, полученное на базе алгоритмов ее функционирования. Дальнейшее развитие системы управления связано с совершенствованием ее взаимодействия с сопрягаемым оборудованием, повышением отказ безопасности и проведением компьютерного моделирования по имеющимся алгоритмам и математическим моделям ее функционирования.
Список литературы Разработка алгоритмов функционирования системы управления безопасностью полета летательного аппарата вертолетного типа
- Шевченко, А.М. Моделирование средств информационной поддержки пилота на этапе взлета самолета/А.М. Шевченко, Г.Н. Начинкина, Ю.И. Солонников//Труды Московского института электромеханики и автоматики (МИЭА). 2012. №5. С. 54-64.
- Сапогов, В.А. Отказобезопасная вычислительная система для комплексных систем управления полетом летательных аппаратов/В.А. Сапогов, К.С. Анисимов, А.В. Новожилов//Электронный журнал «Труды МАИ». 2008. №45. Режим доступа: http://www.mai.ru/science/trudy/published.php?ID=25498&PAGEN_2=2
- Самолет-амфибия Бе-200ЧС/Руководство по летной эксплуатации Книга 2. 2003. 638 с.
- Интеллектуальные системы управления организационно-техническими процессами/под ред. профессора А.А. Большакова. -М.: Горячая линия -Телеком, 2006. 160 с.
- Лачугин, Д.В. Проектирование программного комплекса адаптивной системы управления, сбора и анализа потоковых данных/А.А. Большаков, Д.В. Лачугин, В.В. Лобанов//Программная инженерия. 2015. № 2. С. 13-22.
- Большаков, А.А. Исследование взаимодействия комплексной системы управления с устройствами и системами бортового радиоэлектронного оборудования летательного аппарата/А.А. Большаков, А.А. Кулик, И.В. Сергушов//Вестник Астраханского государственного технического университета. Серия. Управление, информатика и вычислительная техника. №1. 2016. С. 7-17.
