Разработка бездатчиковой цифровой системы управления электроприводом на базе асинхронизированного вентильного двигателя

Автор: Бобров Максим Андреевич, Юшков Игорь Сергеевич, Тутаев Геннадий Михайлович, Гуляев Игорь Васильевич
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 3 т.17, 2017 года.
Бесплатный доступ
Представлены результаты теоретических и экспериментальных исследований работы электропривода на базе асинхронизированного вентильного двигателя с применением новой цифровой бездатчиковой системы управления для усовершенствования и устранения ряда недостатков ранее известных вариантов систем управления данным типом электропривода. Предложена структура наблюдателя скорости с применением ПИ-регулятора. В отличие от многих известных структур наблюдателей скорости, применяемых в системах управления приводов переменного тока, предложенный наблюдатель не содержит в алгоритмах вычисления скорости параметры базовой машины, которые могут меняться в зависимости от режима работы привода, и отличается лучшими динамическими характеристиками. Приведена оценка точности наблюдения угловой скорости ротора в диапазоне от начальных значений до номинальных.
Асинхронизированный вентильный двигатель, бездатчиковое управление, пи-регулятор, наблюдатель скорости, частота
Короткий адрес: https://sciup.org/147158419
IDR: 147158419 | УДК: 621.313.33 | DOI: 10.14529/power170311
Development of the sensorless digital control system of electric drive based on double inverter-fed induction motor
In the article the results of theoretical and experimental research of the electric drive based on double inverter-fed induction motor operation mode using a novel sensorless digital control system to improvement and elimination of previous control systems options disadvantages for this type of electric drive are presented. The structure of a speed observer for an electric drive based on double inverter-fed induction motor using PI-controller is proposed. Unlike well-known speed observers structures used in AC drive control systems, the proposed rotor speed observer for double inverter-fed induction motor is independent on the base machine parameters and isn’t contained it in the speed calculation algorithms, which are depending on the operating mode of the electric drive and has better dynamic characteristics from previous control system options. The evaluation of the angular rotor speed observation accuracy in the range from the initial to the nominal values is given.
Текст научной статьи Разработка бездатчиковой цифровой системы управления электроприводом на базе асинхронизированного вентильного двигателя
В настоящее время регулируемый электропривод (ЭП) стал неотъемлемой частью многих технологических процессов. Самой многочисленной группой является частотно-регулируемый ЭП с асинхронным двигателем (АД) с короткозамкнутым ротором в качестве базовой машины.
Практическая реализация систем векторного управления (СВУ) электроприводом на базе АД с короткозамкнутым ротором сопряжена с целым рядом известных проблем, одной из которых является получение сигнала обратной связи по скорости или положению ротора [1–4]. Наиболее приемлемыми для этой цели являются два варианта:
-
• применение в системе управления датчика скорости или угла поворота вала, которые являются прецизионными микромашинами [5–7];
-
• использование адаптивных наблюдателей состояния, вычисляющих угловую скорость ротора по измеренным значениям токов или напряжений статора [8–11].
В отличие от других электроприводов переменного тока, в ЭП на базе асинхронизированного вентильного двигателя (АВД) существует возможность непосредственного измерения частот тока и напряжения в обмотках двигателя и реализуется принцип частотно-зависимого управления либо по фазе напряжения статора [12], либо по фазе тока [13]. Способ бездатчикового вычисления скорости ротора для получения сигнала обратной связи по скорости в системе управления ЭП на базе АВД был предложен в [14].
Однако указанный способ вычисления скорости ротора имеет ряд существенных недостатков:
-
• измерение частоты производится один раз за период синусоиды. При низких скоростях ротора это может внести существенную ошибку в измерение значения частоты тока или напряжения в цепи статора что, как следствие, приведет к ошибке в вычислениях угловой скорости ротора;
-
• предложенный алгоритм содержит тригонометрические функции и операцию интегрирования, приводящую к накоплению ошибки, влияние которой особенно ощутимо на низких скоростях и требует введения слабых отрицательных обратных связей;
-
• при реализации данного алгоритма необходимо отслеживать точку перехода напряжения или тока статора через «ноль», что при практической реализации вызывает трудности из-за наличия помех при работе преобразователя в цепи статора и применения ШИМ-модуляции, следовательно, к обработке сигналов с датчиков тока предъявляются дополнительные требования по цифровой фильтрации.
Основная часть
В предложенном в [14] способе вычисляется период напряжения в цепи статора двигателя, затем с помощью простых вычислений определяется электрическая скорость ротора:
fi = ^;(1)
T sin
-
—2 п
®i =2пf = ^;
T sin
2п „ _
®е =®1 -®2 =~--2Пf, .(3)
Т sin
Для устранения вышеуказанных недостатков системы управления ЭП на базе АВД будет целесообразным перевести напряжения статора во вращающуюся систему координат dq и непрерывно определять фазу и частоту вращения вектора напряжения статора. Одним из наиболее простых решений является применение функции arctg и нахождение производной фазы напряжения. Структурная схема вычисления фазы и частоты напряжения в цепи статора с применением функции arctg показана на рис. 1.
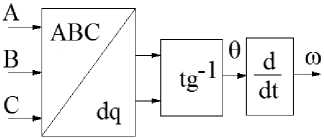
Рис. 1. Структурная схема измерения частоты с применением функции arctg
Однако при практической реализации представленной структуры данный способ построения системы управления также имеет ряд существенных недостатков:
-
• предложенный алгоритм содержит функцию arctg, которая является непрерывной и ограниченной на всей числовой прямой;
-
• в алгоритме присутствует операция диффе-
- ренцирования, что существенно снижает помехоустойчивость данного способа и требует фильтра-
- ции выходного сигнала.
Более рациональным решением задачи изме- рения параметров вектора тока или напряжения статора будет применение ПИ-регулятора и инте- гратора, которые являются типовыми элементами систем управления электроприводами [15–19]. На рис. 2 представлена структурная схема системы управления ЭП на базе АВД при питании цепи статора от ПЧ с выходным инвертором напряжения с ШИМ.
Данная структура может быть использована как для вычисления скорости ротора, так и для реализации принципа частотно-зависимого управления ЭП на базе АВД по фазе тока. Сигналы, получаемые с датчиков тока в цепи статора, преобразуются во вращающуюся систему координат dq. С помощью ПИ-регулятора из q-составляющей тока статора получаем частоту вращения вектора тока статора. Передаточная функция ПИ-регулятора определяется выражением
= K (1 + Тр ) Тр
Проинтегрировав частоту, получим значение угла (фазы) вектора тока статора, относительно которого производиться преобразование координат. Передаточная функция интегратора определяется выражением
Н = ^- (5)
Тр
Следует отметить, что в данной схеме интегратор выполняет также функцию низкочастотного фильтра. При включении второго инвертора с ШИМ в
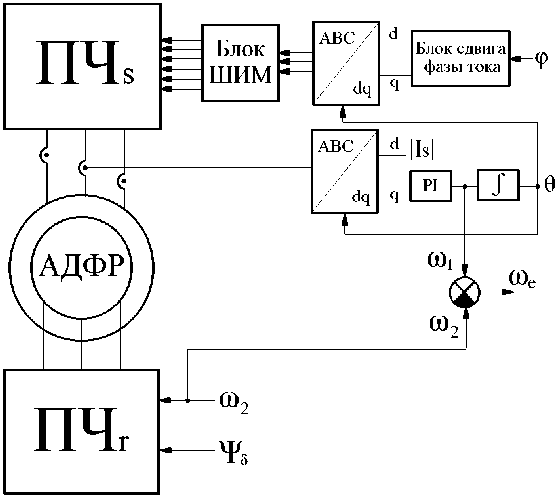
Рис. 2. Структурная схема системы управления ЭП на базе АВД
цепи статора будут возникать помехи в сигналах датчиков тока. Применение данной структуры позволяет исключить дополнительные цифровые фильтры из системы управления с помощью настроек коэффициентов ПИ-регулятора и использование интегратора при идентификации фазы вектора тока статора.
Для верификации предложенной концепции промоделируем систему ЭП на базе АВД в программном пакете PSIM. Для создания имитационной модели в качестве базовой машины выберем АДФР марки 4AK160M4Y3 мощностью 11 кВт, физическая модель которого расположена на экспериментальном стенде. Основной задачей исследования является оценка робастности, точности вычисления скорости и способность предложенной цифровой системы управления реализовать принципы работы ЭП на базе АВД. Для этого будет достаточно рассмотреть разомкнутый контур управления ЭП.
Процессы пуска и синхронизации ЭП на базе АВД с использованием двух инверторов напряжения в цепях ротора и статора подробно описаны в [13]. При неподвижном роторе в цепи статора протекает ток возбуждения (рис. 3, А). После преобразования токов в статоре в систему dq производим настройку ПИ-регулятора в имитационной модели таким образом, чтобы при неподвижном роторе на выходе регулятора получилось соотношение
ω 1 = ω 2 . (6)
В имитационной модели базовая машина возбуждается напряжением с f 2 = 10 Гц. Значение частоты тока до включения инвертора напряжения в цепи статора f 1 = 10 Гц (рис. 3, В). Проинтегрировав значение частоты, получаем фазу вектора тока статора θ в диапазоне от 0 до 2π (рис. 3, Б). Обратное преобразование координат в систему ABC в имитационной модели выполняется относительно θ.
Процессы, происходящие в системе управления, после включения второго инвертора и начале разгона двигателя описаны в [14]. При заданной ω2 и измеренной ω1 электрическая скорость ротора будет определяться выражением
ω е = ω 1 - ω 2 . (7) Процесс разгона двигателя до номинальной скорости показан на рис. 4.
Экспериментальные исследования показали стабильную работу предложенной системы управления ЭП на базе АВД во всем диапазоне скоростей и нагрузок. Алгоритм вычисления скорости полностью инвариантен к параметрам базовой машины и режиму работы ЭП и зависит от точности вычисления ω 1 . Настройка коэффициентов ПИ-регулятора обеспечивает робастность системы
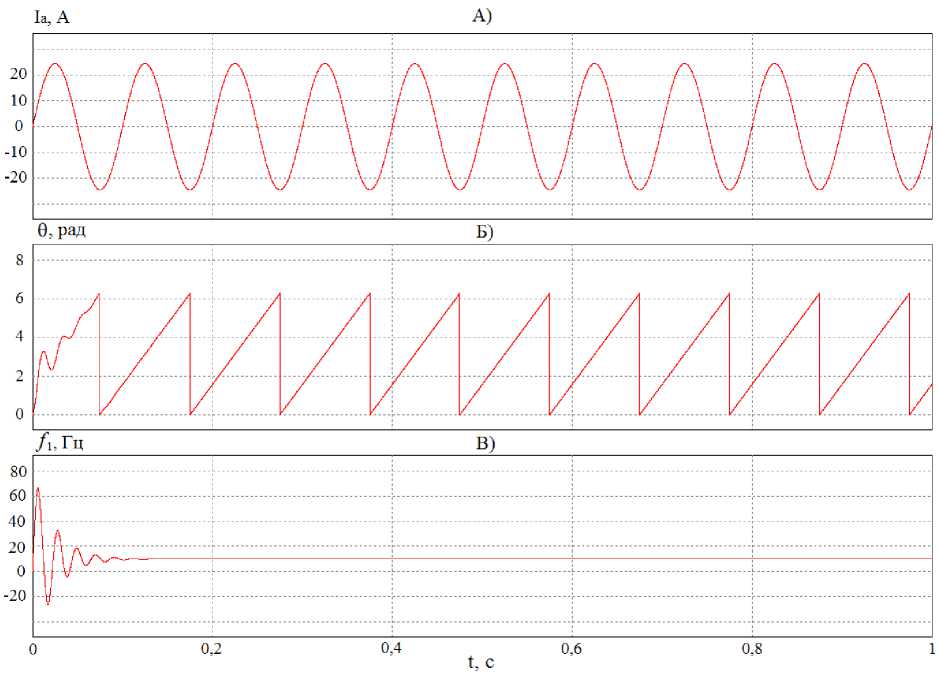
Рис. 3. Временные диаграммы в ЭП на базе АВД до включения силового преобразователя в цепи статора
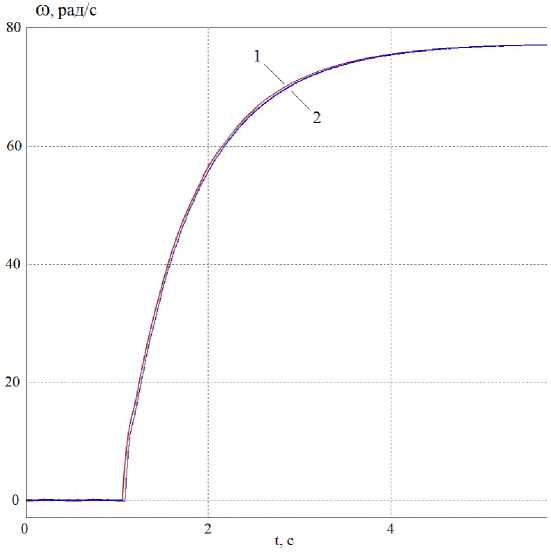
Рис. 4. Разгон двигателя до номинальной скорости: 1 – кривая скорости с датчика на валу двигателя; 2 – скорость, вычисляемая наблюдателем
при изменениях частоты токов в статоре. Расхождение в значениях скорости, измеренной с помощью датчика скорости, и вычисленной скорости в системе управления не превышает 1 % в установившихся режимах.
Заключение
В ЭП на базе АВД существует возможность определения частоты вращения ротора без применения «классических» датчиков скорости, положения ротора и хорошо известных бездатчиковых алгоритмов вычисления скорости в электроприводах переменного тока, которые, как правило, зависят от параметров базовой машины, существенно изменяющихся в зависимости от режима работы ЭП. Это снижает стоимость реализации системы управления и повышает надёжность системы ЭП.
Выводы
В результате теоретических и экспериментальных исследований была разработана и апробирована система управления ЭП на базе АВД, обладающая следующими преимуществами:
-
• способность непрерывного измерения частоты тока статора, исключена необходимость отслеживания точки перехода тока через «ноль», что облегчает практическую реализацию;
-
• не содержит в алгоритме вычисления скорости ротора сложных тригонометрических функций, параметров базовой машины, не зависит от режима работы ЭП;
-
• позволяет вычислять скорость ротора с ошибкой не более 5 % при скорости ротора 10–30 % от номинальной.
Исследование выполнено за счёт средств гранта Российского научного фонда (проект № 15-19-20057).
Список литературы Разработка бездатчиковой цифровой системы управления электроприводом на базе асинхронизированного вентильного двигателя
- Enhanced Sensorless Control of SPMSM based on Stationary Reference Frame High-Frequency Pulsating Signal Injection/Z. Chen, X. Cai, R. Kennel, F. Wang//IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia 2016). -P. 885-890 DOI: 10.1109/IPEMC.2016.7512403
- Sensorless Control of Linear Permanent Magnet Synchronous Motors Using a Combined Sliding Mode Adaptive Observer/M.A.M. Cheema, J.E. Fletcher, D. Xiao, F. Rahman//IEEE Energy Conversion Congress and Exposition (ECCE). -September 2014. -P. 4491-4498 DOI: 10.1109/ECCE.2014.6954016
- An Improved PMSM Rotor Position Sensor Based on Linear Hall Sensors/Jianhui Hu, Jibin Zou, Fei Xu et al.//Proc. IEEE PESC Conf. Rec. -2012. -Р. 3591-3594 DOI: 10.1109/TMAG.2012.2202279
- Deenadayalan, A. Position Sensorless Sliding Mode Observer with Sigmoid Function for Brushless DC Motor/A. Deenadayalan, G.S. Ilango//Advances in Power Conversion and Energy Technologies (APCET). -August 2012. -P. 1-6 DOI: 10.1109/APCET.2012.6302028
- Litvinov, B.V. Standard Links and Cascade Equivalent Circuits of Electric Machines: Monograph/B.V. Litvinov, O.B. Davydenko. -Novosibirsk: NSTU Publishers, 2008. -215 р.
- Исаков, А.С. Реализация наблюдателя состояний асинхронного двигателя c короткозамкнутым ротором в бездатчиковой системе векторного управления/А.С. Исаков//Научно-технический вестник СПбГУ ИТМО. -2007. -Вып. 38. Технология управления. -С. 280-286.
- Lee, K.-W. Evaluation of Back-EMF Estimators for Sensorless Control of Permanent Magnet Synchronous Motors/Lee K.-W., Ha J.-I.//Journal of Power Electronics. -2012. -Vol. 12, no. 4. -P. 604-614 DOI: 10.6113/JPE.2012.12.4.604
- Schauder, C. Adaptive speed identification for vector control of induction motor without rotational transducers/C. Schauder//IEEE Trans. Industry Applications. -1992. -Vol. 28, no 5. -P. 1054-1061 DOI: 10.1109/28.158829
- Виноградов, А.Б. Адаптивно-векторная система управления бездатчикового асинхронного электропривода серии ЭПВ/А.Б. Виноградов, А.Н. Сибирцев, И.Ю. Колодин//Силовая электроника. -2006. -№ 3. -С. 46-51.
- Saihi, L. Robust sensorless sliding mode control of PMSM with MRAS and Luenberger extended observer/L. Saihi, A. Boutera//2016 8th International Conference on Modelling, Identification and Control (ICMIC 2016). -2016. -P. 48-57 DOI: 10.1109/ICMIC.2016.7804294
- Афанасьев, К.С. Идентификация скорости асинхронного электродвигателя лабораторного стенда с помощью фильтра Калмана и наблюдателя Люенбергера/К.С. Афанасьев, А.С. Глазырин//Электротехнические комплексы и системы управления. -2012. -№ 4. -С. 66-69.
- Тутаев, Г.М. Алгоритмы энергоэффективного управления асинхронизированным вентильным двигателем/Г.М. Тутаев. -Саранск: Изд-во Мордов. ун-та, 2014. -100 с.
- Gulyaev, I.V. Inverter-bed Induction Motor Power Supplied by Voltage Inverter/I.V. Gulyaev, G.M. Tutaev, I.S. Yushkov//Russian Electrical Engineering. -2011. -Vol. 82 (2). -P. 80-82 DOI: 10.3103/S1068371211020076
- Tutaev, G. Rotor speed estimation in control system of electric drive based on induction inverter-fed motor/G. Tutaev, M. Bobrov//Proceedings of the 2016 IX International Conference on Power Drives Systems (ICPDS). -October 2016. -P. 1-4 DOI: 10.1109/ICPDS.2016.7756689
- Шрейнер, Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты/Р.Т. Шрейнер. -Екатеринбург: УрО РАН, 2000. -654 с.
- Maximum-torque and maximum-efficiency rotor flux selection of an induction motor in transient regime/A. Ben Ali, R. Abdelati, M. Mimouni Faouzi, R. Dhifaoui//International Journal of sciences and Techniques of Automatic control & computer engineering (IJ-STA). -2010. -Vol. 4, no. 2. -P. 187-196.
- Мещеряков, В.Н. Наблюдатель потокосцепления для машины двойного питания, управляемой по статорной и роторной цепям/В.Н. Мещеряков, Д.В. Безденежных//Вестник Воронежского государственного технического университета. -2010. -Т. 6, № 11. -С. 170-173.
- Pankratov, V.V. Asynchronous machines and machines with a double power supply/V.V. Pankratov, E.A. Zima//Russian Electrical Engineering. -2003. -Vol. 72. -P. 22-29.
- Виноградов, А.Б. Векторное управление приводами переменного тока/А.Б. Виноградов. -Иваново: ИГЭУ им. В.И. Ленина, 2008. -298 с.
