Разработка биоинженерного мехатронного модуля для экзоскелета нижних конечностей человека

Автор: Яцун Сергей Федорович, Рукавицын Александр Николаевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Современные технологии в промышленности, строительстве и на транспорте
Статья в выпуске: 4-5 т.14, 2012 года.
Бесплатный доступ
В статье рассмотрены некоторые вопросы создания реабилитационных механотерапевтических устройств, проектируемых на основе современных мехатронных биоинженерных технологий.
Экзоскелет, мехатронный модуль, биоинженерия, реабилитация, исполнительное звено, механотерапия
Короткий адрес: https://sciup.org/148201396
IDR: 148201396 | УДК: 615.471
Development of bioengineering mechatronic module for the exoskeleton of human inferior extremities
In article some questions of creation the rehabilitation mechanical-therapy devices designed on the basis of modern mechatronic bioengineering technologies are considered.
Текст научной статьи Разработка биоинженерного мехатронного модуля для экзоскелета нижних конечностей человека
позволит медсёстрам и врачам поднимать пациентов с кровати, не прилагая к этому каких-нибудь значимых усилий. Экзоскелет может стать более дешевой альтернативой хирургическому эндопротезированию крупных суставов, которое является довольно сложной и дорогостоящей операцией и не рекомендуемая пациентам с ослабленным здоровьем [2]. Примером подобной реабилитационной системы является японский экзоскелет для нижних конечностей Hybrid Assistive Limb (HAL), представленный на рис. 1.
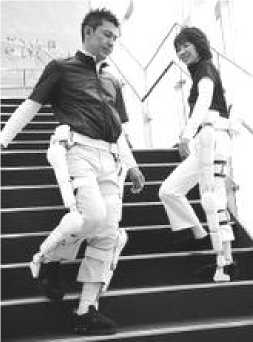
Рис. 1. Люди с повреждениями опорнодвигательного аппарата со специальным экзоскелетом (HAL)
Современное реабилитационное механоте-рапевтическое устройство (экзоскелет) представляет собой систему со сложной конфигурацией (см. рис. 2), объединяя в себе различные механические и электронные компоненты, призванные в совокупности обеспечивать максимально эффективный и безопасный процесс реабилитации пациентов. При этом большое значение приобретают функциональные возможности каждого узла, из которых и складываются характеристики устройства [3, 4]. Необходимо отметить, что при существующем множестве подобных устройств, предназначенных для людей с болезнями опорно-двигательного аппарата, математическому моделированию их функционирования в составе сложной биоинженерной мехатронной системы уделяется недостаточно внимания.
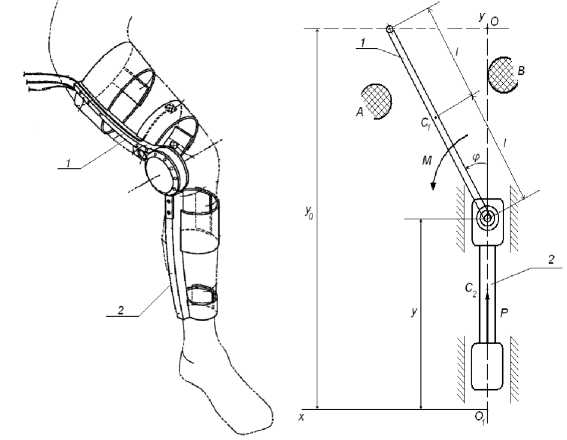
Рис. 2. Экзоскелет для нижних конечностей человека и его расчетная схема
Разрабатываемое биоинженерное реабилитационное устройство для нижних конечностей состоит из двух отдельных модулей с индивидуальными приводами. Со стороны привода коленного модуля к исполнительному звену 1 прикладывается управляющий момент M. Привод поступательного движения модуля мышц голени воздействует на исполнительное звено 2 управляющим усилием Р . С учетом антропометрических данных человека, а также для того, чтобы не нанести вред пациенту, перемещение исполнительного звена 1 коленного модуля дополнительно ограничено препятствиями А и В, поэтому плавное изменение угла поворота ф=ф(1) данного звена возможно лишь в некотором интервале [ ф(0), ф(т) ], где т - время движения исполнительного звена.
Специфика работы механотерапевтического устройства в составе сложной человеко-машинной системы требуют, чтобы исполнительное звено 1 сошло со связи (ограничителя) В в момент времени t=0 и «мягко» коснулось ограничителя А при t=T, т.е. так, чтобы были удовлетворены условия d- ф(t )l t=о, t=т=°;
dt dr Ф( t)11=0, t=t = 0 dt
•
Программное движение звена 1, удовлетворяющее требованиям «мягкого» касания, принимаем в следующем виде:
ф ( t ) = р (0) + [ р ( т ) - ф (0)]
t 1 .Г 2 n t
---sm l--- т 2 п V т
Центр тяжести звена 1 находится в точке Ci, а звена 2 - С2. Будем считать, что торможение звена 1 начинается в тот момент, когда его угловое ускорение обращается в ноль. Пренебрегая силами сопротивления движению, определим значения управляющих сил и моментов в начале торможения исполнительного звена коленного модуля. Для решения задачи применим уравнения Лагранжа II рода [5]. Будем рассматривать данную биоинженерную систему как механическую систему как систему с двумя степенями свободы, приняв за обобщенные координаты угол φ поворота звена 1 и смещение у звена 2. Для рассматриваемой системы можно записать уравнения связей:
‘ У с 1 = У + 1 cos ф ;
xc j = l sin ф
4;
В соответствии с выбранными обобщенными координатами имеем dГ 9T )_9T.
dt ^9ф J 9ф d Г 9 T У^^ dt ^9y J 9y
Совокупность уравнений (1) и (2) позволяет составить дифференциальные уравнения движения рассматриваемой механической системы. Составим выражение для кинетической энергии системы Т, как функцию обобщенных скоростей ф и y и обобщенных координат ф и у . Кинетическая энергия системы равна сумме кинетической энергии Т 1 звена 1 и кинетической энергии Т 2 звена 2:
m^ 2 ml 2 ф 2 2 mly ф sin ф J ф 2 m2X 2
T = + + +
2 2 2 2 2
( m, + m 7) y 2 ( ml 2 + J ) ф 2
= v 1 2 + ^-1- mlyф sin ф
Найдем значения слагаемых уравнений Лагранжа:
a T ,,
— = ( m + m 2) y - mJ ф sin ф;
8y d at . . .-
= ( m1 + m 2) y - mJ ф sin ф - mJ ф cos ф ;
dT a y 1 .........
a t
_ ax’
— = ( mJ 2 + Jx ) ф - mjy sin ф ;
Зф d at ,„
--= ( mJ + Jx )ф - mJу sin ф - mjy ф cos ф ;
dT aф............
a t
— = - mjy t p cos ф .
бф
Определим обобщенные силы Q y и Q φ . Для определения Q y мысленно наложим на систему связь φ=const и, сообщив системе возможную скорость y , вычислим возможную мощность сил, действующих на нее: N y = Q y y = Py, отсюда
y = 2lф sin ф + 2lф2 cos ф.
Равенства (8) представляют собой зависимость управляющего момента М и управляющего усилия Р от известных функций ф , ф и Ф> . Так как φ является заданной функцией времени, то вычисление производных Ф и Ф> , а следовательно, и управляющего момента М и усилия Р не представляет труда. Вычислим М и Р в момент начала торможения звена 1. В этот момент угловое ускорение фФ обращается в нуль. Производные Ф и фФ соответственно равны:
ф = [ ф ( т ) - ф (0)](1 - cos 2 я ? / т )! т и ф" = 2 П [ ф ( т ) - (0 0)](sin 2 n t / т )/ т 2
Отсюда
2п[ ф(т) - ф(0)] 2п sui t — о, т2
т
т t = —.
Таким образом, торможение звена
2п или —t = П и т
1 начинается в
Q y = P
момент
времени t = —. В этот момент
времени
Аналогично, мысленно наложив на механическую систему связь y=const и сообщив ей возможную скорость Ф , получим выражение возможной мощности N : N = Q^ф = Мф , отсюда
Q ф = м
Обобщенные силы Q y и Q φ можно определить и из выражения работы сил на элементарных перемещениях системы, соответствующих вариации каждой обобщенной координаты:
Подставляя (3), (4) и (5) в (2), получим:
Для обеспечения вертикального положения тела человека при ходьбе необходимо обеспечить перемещение крайней точки исполнительного звена 1 вдоль прямой, перпендикулярной оси y , поэтому на механизм дополнительно оказывается наложенной связь y + 2l cos φ = y 0 , или y = y 0 – 2l cos φ y0=const, следовательно, y = 2l" sin ф . Отсюда
y = 2l ф sin ф + 21ф2 cos ф.
[ ф(0) + ф(т)]
2 ’
2[ ф ( т ) - ф (0)]

Подставляя (9) в (8), получаем интересующие нас выражения т1
м I I = - 4 m i l [ ф ( т ) - ф (0)] —sm[ ф (0) + ф ( т )];
V 2 )
т\1
P 12 I = 4 l ( m i + 2 m 2 )[ ф ( Т ) - *ф (0)] ? cos
ф (0) + ((Ут )
На основе представленных выражений с помощью пакета блочного моделирования Matlab/Simulink получены графики зависимостей управляющих моментов и сил от времени. Вычисления производились в интервале [0;τ] с шагом 0,001τ при следующих исходных данных: m 1 = 12 кг; m 2 = 6 кг; J 1 = 1,8 кг·м2; l=0,5 м; φ(0)=0; φ(τ)=π/6. Графики зависимостей М и Р от времени показаны на рис. 3, 4.
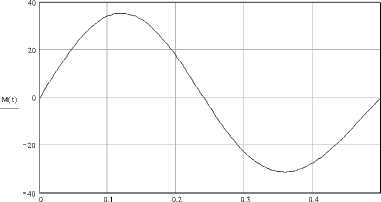
Рис. 3. График зависимости управляющего момента М от времени
Выводы: разрабатываемые биоинженерные мехатронных модули должны учитывать естественные движения в коленном суставе человека и движения совместно с механотерапевтическим устройством. Движение каждого звена влияет на движение остальных звеньев. Указанное взаимовлияние может происходить через механические устройства, общую нагрузку, через общий источник энергии, а также вследствие естественных и искусственных динамических связей между каналами в блоке управления [6]. При этом необходимо формировать управление мехатронной системой (особенно на высоких скоростях, где влияние динамических факторов существенно) с учетом перекрестных связей.
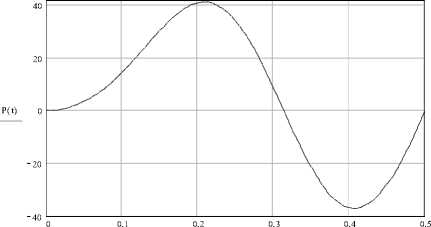
Рис. 4. График зависимости управляющего усилия Р от времени
Для анализа поведения исполнительного звена биоинженерного модуля и проведения численного эксперимента в дальнейшем необходимо разработать уточненную математическую модель проектируемого мехатронного устройства с целью получения необходимых данных, определяющих рабочую область движения исполнительного органа, а также форму траекторий, которую должна обеспечивать система реабилитации для реализации естественных движений нижних конечностей человека, что позволит оптимизировать ее параметры и синтезировать алгоритмы работы и законов управления движением исполнительных звеньев.
Работа выполнена в рамках реализации Федеральной целевой программы «Научные и научнопедагогические кадры инновационной России» на 20092013 годы.
Список литературы Разработка биоинженерного мехатронного модуля для экзоскелета нижних конечностей человека
- Яцун, С.М. Неинвазивные методы контроля в диагностике вязко-эластичных свойств кожного покрова/С.М. Яцун, А.Н. Рукавицын, А.Ф. Вальков//Известия Самарского научного центра Российской академии наук. 2010. Т. 12(36), №4(3). С. 732-734.
- Уварова, Н.П. Экзоскелеты: настоящее и будущее/Н.П. Уварова, И.А. Яковлев, А.Н. Рукавицын//Наука и инновации -2012: Материалы VIII Международной научно-практической конференции. 2012. Т. 16 Биологические науки, «Nauka i studia», Прземисл. С. 65-72.
- Яцун, С.Ф. Кинематический анализ движения руки в локтевом суставе при реабилитации методами механотерапии/С.Ф. Яцун, Е.С. Тарасова//Известия Самарского научного центра Российской академии наук. 2011. Т. 13, №4(4). С. 1215-1220.
- Яцун, С.Ф. Исследование динамики движения манжеты реабилитационного устройства совместно с рукой человека/С.Ф. Яцун, Е.С. Тарасова, А.И. Жакин//Известия ЮЗГУ. 2012. №1 (40). С. 35-41.
- Яблонский, А.А. Курс теоретической механики: учебник для ВУЗов/А.А. Яблонский, В.М. Никифорова. -М.: Интеграл-Пресс, 2007. 608 с.
- Подураев, Ю.В. Основы мехатроники: учебное пособие/Ю.В. Подураев. -М., Из-во МГТУ «Станкин», 1999. 80 с.
