Разработка блока управления для автоматизированного смесителя огнетушащей жидкости

Автор: Хорькова М.И., Савченкова В.А., Перминов А.В.
Журнал: Лесохозяйственная информация @forestry-information
Рубрика: Лесная пирология
Статья в выпуске: 1, 2026 года.
Бесплатный доступ
В условиях оперативного реагирования на лесные пожары поддержание требуемой концентрации огнетушащих растворов представляет сложную задачу, обусловленную вариативностью их суммарного расхода, колебаниями вязкости и погрешностями, возникающими при введении компонентов вручную. Современные компактные системы пожаротушения зачастую не располагают полным циклом управления концентрацией вещества и не обладают средствами самодиагностики. Это приводит к росту погрешностей и повышению вероятности возникновения рисков. Практическая ценность исследования заключается в потенциальном снижении трудозатрат оператора и оптимизации процесса приготовления растворов на начальных этапах пожаротушения. В статье рассматривается процесс разработки и экспериментальная проверка блока управления для автоматизированного смесителя на базе Arduino для приготовления растворов из 2–3-х компонентов. Представлен человеко-машинный интерфейс для выбора объёма и пропорций, калибровки и журналирования циклов. Полученные результаты свидетельствуют о том, что необходимые уровни точности и автономности для его применения достигнуты. Блок способен обеспечивать автоматическое приготовление растворов требуемой концентрации с автоматическим дозированием, осуществляя непрерывный онлайн-контроль расхода и комплексные защитные функции.
Автоматизированный смеситель огнетушащей жидкости, дозирование по доле, импульсные расходомеры, калибровка (LUT), пропорциональный/пропорционально-интегральный регулятор (P/PI), точность концентрации, динамические показатели (ts, IAE, перерегулирование), человеко-машинный интерфейс (OLED), функции безопасности и самодиагностика, автономное питание
Короткий адрес: https://sciup.org/143185537
IDR: 143185537 | УДК: 630.432.1 | DOI: 10.24419/LHI.2304-3083.2026.1.10
Development of Control Unit for Automated Mixer of Extinguishing Fluid
Maintaining the required concentration of fire extinguishing solutions during rapid response to forest fires is a complex task due to variability in their total flow rate, viscosity fluctuations, and errors that arise when manually introducing components. Modern compact fire extinguishing systems often lack a full cycle of agent concentration control and self-diagnostic tools. This leads to increased errors and a higher risk of risks. The practical value of this study lies in the potential reduction of operator labor costs and optimization of the solution preparation process in the initial stages of fire suppression. This article discusses the development and experimental validation of a control unit for an automated Arduino-based mixer for preparing solutions from 2–3 components. A human-machine interface for selecting volume and proportions, calibrating, and logging cycles is presented. The results indicate that the required levels of accuracy and autonomy for its use have been achieved. The unit is capable of automatically preparing solutions of the required concentration with automatic dosing, implementing continuous online flow control and comprehensive protective functions.
Текст научной статьи Разработка блока управления для автоматизированного смесителя огнетушащей жидкости
В условиях оперативного реагирования на лесные пожары поддерживать точную концентрацию огнетушащего раствора сложно: нестабильность потока приводит к существенным погрешностям при контроле его объёма. От этого напрямую зависит качество раствора и расход концентрата, т. е. эффективность тушения и стоимость работ [1–4]. Современные компактные пропорционаторы, как правило, не обеспечивают точное регулирование фактической доли в системе замкнутого контура, а изменения в режиме потока приводят к снижению точности их работы [1–4].
Нами разработан блок управления, предназначенный для автоматического поддержания заданного соотношения потоков на основе показаний расходомеров, с функцией самодиагностики. Решение базируется на устоявшихся методах калибровки и регулирования, однако воплощено в компактном и энергосберегающем исполнении, что делает его пригодным для мобильных систем [5–11].
Цель исследования – разработать и экспериментально подтвердить работоспособность блока управления для автоматизированного смесителя огнетушащей жидкости на базе Arduino. Блок предназначен для приготовления растворов с заданной концентрацией из 2–3-х компонентов в условиях оперативного реагирования. В его функционал входят: автоматическое дозирование, онлайн-мониторинг расхода, интуитивно понятный интерфейс (OLED-меню), а также механизмы самодиагностики и обеспечения безопасности. Разработанный блок будет адаптирован для интеграции в мобильный пожарный модуль.
В соответствии с целью исследования были поставлены следующие задачи.
Разработка и тестирование алгоритмов: создать и верифицировать методы дозирования и регулирования потока (на основе ПИД-регуляторов, табличных калибровок или импульсного учёта) для поддержания заданной концентрации компонентов при переменном расходе.
Проектирование и внедрение аппаратнопрограммного комплекса (АПК): разработать аппаратно-программный комплекс (включающий датчики расхода, насосы/реле, контроллер Arduino, систему питания и пользовательский интерфейс) и гарантировать его стабильное функционирование в уличных условиях.
Обеспечение удобства и надёжности: реализовать интуитивно понятное меню для выбора объёма и пропорций, систему логирования рабочих циклов и защиту от некорректных действий оператора.
Основные критерии достижения цели:
-
1. Точность концентрации: средняя абсолютная ошибка не более ±2% заданной пропорции при диапазоне расходов 0,2–3,0 л/мин.
-
2. Стабильность дозирования: отклонение текущей доли концентрата от заданной не более ±5% после переходного процесса ≤ 5 с.
-
3. Производительность: приготовление 1 л раствора с заданной пропорцией за ≤ 60 с.
-
4. Надёжность интерфейса: завершение цикла без вмешательства оператора в ≥ 99% запусков (по результатам не менее 50 циклов).
-
5. Энергопитание: непрерывная работа не менее 2 ч от переносного источника (12–20 В) при типовом режиме.
-
6. Безопасность: автоматическая остановка при обрыве сигнала датчика/сухом ходе/ переливе; звуковая/визуальная индикация ошибок.
-
7. Калибруемость: процедура калибровки расходомеров ≤ 3 мин на канал с сохранением коэффициентов в энергонезависимой памяти.
Методика исследований
Основные сокращения, обозначения, единицы измерения и формулы, используемые в статье, приведены в табл. 1.
Формулы служат инструментом для количественного анализа отдельных этапов измерительных процессов. Их применение гарантирует воспроизводимость и достоверность научных данных, а также позволяет оценить
Таблица 1. Основные сокращения, обозначения, единицы измерения и формулы, используемые в статье
-
1) k-фактор:k = N/Vэт (имп/л),
где k – коэффициент пересчёта, показывающий количество импульсов расходомера на 1 л пропущенной жидкости.
Для определения k через каждый канал пропускают известный объём концентрата Vэт и фиксируют число импульсов N. Рекомендуется выбирать Vэт >1 л, чтобы уменьшить относительную погрешность, связанную с неточностью измерения объёма и дискретностью подсчёта импульсов.
-
2) Объём пропускаемой жидкости i-го канала:
Vi = Ni/ki (л), где:
Vi – объём жидкости, прошедший по i-му каналу за выбранный интервал учёта, л;
Ni – число импульсов, поступивших за последний интервал обновления ∆t по i-му каналу, имп;
ki – k-фактор расходомера i-го канала, полученный при калибровке, имп/л.
-
3) Текущий расход:
Qi(t) = ANi/(k x At) (л/мин), где:
Qi(t) – текущий расход по i-му каналу, л/мин;
∆Ni – число импульсов, поступивших за последний интервал обновления ∆t по i-му каналу, имп;
ki – k-фактор датчика i-го канала, полученный при калибровке, имп/л;
∆t – интервал обновления, с.
-
4) Суммарный объём смеси:
V Σ = ΣVi (л), где:
-
V Σ – общий объём приготовленной смеси, л;
Vi – объём жидкости, прошедший по i-му каналу за интервал учёта, л.
Для расчёта реального объёма приготовленной смеси суммируем объёмы всех каналов
(вода, концентрат(ы) и т.д.) за текущий цикл дозирования. V Σ нужен для контроля достижения заданного объёма цикла и вычисления фактической доли компонента Vc/V Σ . Обнуление сумм выполняют в начале каждого цикла, «хвост» в магистрали учитывают по журналу.
-
5) Ошибка доли концентрата: ε = Vc/VΣ – pc ,
где:
ε – ошибка доли концентрата;
Vc – накопленный объём концентрата, л;
-
V Σ – суммарный объём смеси, л;
pc – целевая доля концентрата.
Показатель ε характеризует разницу между фактической долей концентрата и заданной: при ε>0 наблюдается перелив (фактическая доля выше целевой), при ε<0 – недолив. Контроллер каждые ∆t вычисляет ε и корректирует управление насосами: в on/off изменяет длительность импульсов, в P/PI формирует непрерывную команду u ∝ ε (с интегральной подстройкой и ограничениями по насыщению).
-
6) Погрешность доли концентрата:6p = 100 x |V/V - Pci, %.
Показатель δp удобен для отчётов и сравнения режимов, так как является безразмерной величиной (учитывает и перелив, и недолив) и выражается в процентах. По сериям испытаний приводятся среднее δp, 95-й перцентиль P95(δp) и/или доверительные интервалы. Стандартные критерии приёмки устанавливают следующие пороговые значения: δp≤2%, а P95(δp) ≤3%.
-
7) IAE: IAE = ∫ |ε(t)| dt,
где ε (t) – ошибка доли концентрата (со знаком + или -) во времени; интегрирование ведётся в выбранном интервале теста.
IAE измеряет «накопленную» ошибку доли концентрата за время процесса: чем меньше значение, тем быстрее и стабильнее система выходит на целевую концентрацию.
Метрика удобна для сравнения алгоритмов (on/off vs P/PI) и профилей возмущений; обычно дополняется временем установления ts и перерегулированием Mo для полной оценки динамики.
Предмет исследования – точность поддержания целевой доли компонентов, динамика дозирования при нестационарном расходе, устойчивость алгоритмов коррекции и надёжность подсистем безопасности.
Для обеспечения точности экспериментальных данных проведена поэтапная калибровка дозирующих каналов:
-
1. Пропустить известный объём Vэт (не менее 1 л) через каждый канал.
-
2. Зафиксировать число импульсов N.
-
3. Рассчитать k-фактор: k = N /Vэт (имп/л).
-
4. Повторить для трёх скоростей потока; усреднить k или построить таблицу k(Q) при выраженной нелинейности.
-
5. Сохранить коэффициенты в EEPROM.
Обсуждение и результаты
В рамках базового учёта объёма жидкости по каждому каналу измерительный модуль переводит количество импульсов расходомера в физический объём жидкости. Для этого используется индивидуальный коэффициент датчика ki (имп/л), полученный на этапе калибровки. Накопленное за интервал работы число импульсов Ni делят на ki и таким образом определяют объём жидкости канала: Vi = Ni/ki. Такой способ обеспечивает однозначное и воспроизводимое соответствие «импульсы → литры» без ручной подстройки и служит основой дальнейших вычислений.
Значения Vi используют для контроля общего объёма приготовленной смеси VΣ и, главное, для оценки фактической доли целевого компонента Vc/VΣ. Это позволяет алгоритму дозирования автоматически корректировать работу насосов и поддерживать заданную концентрацию независимо от колебаний расхода. На практике важным является индивидуальное хранение коэффициентов ki для каждого канала и обнуление счётчиков импульсов в начале цикла, что снижает систематические ошибки и повышает повторяемость результатов.
Текущий расход по каждому каналу рассчитывается как отношение числа импульсов за последний интервал измерения ∆t к произведению калибровочного коэффициента датчика ki (имп/л) и длительности этого интервала: Qi(t) = AN i /(k i x At). Тем самым поток из импульсного интерпретируется в физические единицы (л/мин). При использовании ∆t в секундах применяется эквивалентная форма Q i (t) = 60 ANi/(k i x At(c)), что обеспечивает корректное приведение к минутным расходам.
Оценка Qi(t) необходима для оперативной коррекции дозирования: она позволяет отслеживать нестационарность суммарного потока, формировать управляющее воздействие в контуре регулирования доли и прогнозировать достижение заданного объёма цикла. На практике выбирается «окно» ∆t порядка 0,2–0,5 с, а для подавления шумов применяется скользящее усреднение (или медианная фильтрация) по нескольким интервалам измерения. Подсчёт импульсов выполняется в прерываниях, чтение – атомарно; дополнительно вводятся пороги антидребезга и защита от деления на 0 при малых расходах.
Целевая доля pi – это задаваемая пользователем (через OLED-меню) доля компонента i в готовой смеси, выраженная в виде числа от 0 до 1. Для концентрата обычно используют pc = 0,03 (что соответствует 3%). Именно к этой величине стремится контур регулирования: фактическая доля Vc/V Σ сравнивается с pc, по разности формируется управляющее воздействие на насосы.
В пользовательском интерфейсе допускается выбор из стандартных значений целевой доли концентрата (например, 1, 3, 6%) или задание шага. Данные сохраняются в энергонезависимой памяти (EEPROM), гарантируя их наличие после каждого запуска. Для многокомпонентного смешивания набор {pi} должен удовлетворять ∑ ipi≤1; при выборе доли одного компонента оставшаяся часть автоматически отводится базовому (воде) или распределяется между остальными по правилам меню.
Коррекция выполняется дискретно с шагом ∆t. На каждом шаге контроллер вычисляет ошибку доли концентрата ε = Vc/V Σ – pc и по её знаку и величине корректирует управляющее воздействие на каналы. В простом релейном режиме (on/off) изменяется длительность импульса/скважность включения насоса: при ε<0(недолив) –длительностьувеличи-вается, при ε>0 (перелив) – уменьшается, при |ε| ниже порога гистерезиса управление не меняется. В режиме P/PI-регулирования команда управления рассчитывается по ошибке доли ε по формуле uk = Kpεk+Ki ∑ εk∆t с ограничением скорости изменения, насыщением по физическим пределам (0≤u≤u ). max
Для подавления шума и оптимизации работы насоса при вибрации применяется фильтрация показателя ε (скользящее среднее или медиана). Кроме того, для обеспечения стабильности и долговечности оборудования введены ограничения на минимальную продолжительность рабочего цикла и обязательный интервал простоя между запусками. Коррекция разрешается только после достижения минимального накопленного объёма Vmin (например, 50–100 мл), чтобы стартовая статистика не искажала управление.
Таким образом, последовательность исполнения данных алгоритмов и непрерывная верификация их работы обеспечивают высокоточный автоматизированный учёт, поддержание состава и его качественный контроль в реальном времени.
Для оценки точности дозирования и устойчивости алгоритмов смешивания проведён комплекс стендовых испытаний, включающий статические и динамические режимы, а также проверку функций безопасности и оценку энергопотребления. Во всех экспериментах осуществляется непрерывное журналирование (CSV: метка времени; импульсы по каналам; расчётные Vi, Qi; уставки; статусы; коды ошибок). Результаты обрабатывают постфактум: вычисляют ε = Vc/V Σ -pc, δp=100∙|ε|, время установления ts (в пределах ±5%), перерегулирование Mo и интегральную ошибку IAE= ∫ |ε(t)|dt. Для каждой точки режима выполняют не менее 5 повторов.
При фиксированных суммарных расходах QΣ = {0,3; 1,0; 2,0} л/мин готовят растворы объёмом 1 и 3 л с целевыми долями концентрата pc = {1, 3, 6%}. Перед стартом обнуляют счётчики импульсов; после достижения заданного объёма подачу отключают, а «хвост» в магистрали учитывают по журналу. Для каждой комбинации (Q Σ , pc) оценивают δp и P95(δp) и сравнивают с критериями приёмки (δp≤2%, P95≤3%).
Устойчивость регулирования доли к быстро меняющемуся суммарному расходу проверяют с использованием трех профилей: (1) ступень 0,5 → 1,5 л/мин и 1,5 → 0,5 л/мин; (2) пилообразный сигнал 0,3 ↔ 2,0 л/мин с периодом 30 с; (3) псевдослучайные возмущения с перестройкой каждые 2–5 с. Во всех случаях целевая доля pc = 3%. По временным рядам ε(t) рассчитывают ts, Mo и IAE.
Оценка влияния вязкости и температуры на точность дозирования проводится с помощью двухфакторного дисперсионного анализа (ANOVA) по δp. Анализ включает три уровня вязкости (низкая/средняя/высокая) и три профиля потока (статический, ступень, «пила») при QΣ = 1,0 л/мин и pc = 3%). При наличии термоконтроля испытания повторяют при 5, 20 и 35 °C; в случае необходимости применяют отдельные калибровочные наборы.
В процессе тестирования имитируются ключевые отказы: обрыв сигнала расходомера, «сухой ход» насоса, переполнение уровня, просадка питания. Для каждой ситуации фиксируются: время реакции (цель ≤ 0,4 с), корректность защитных действий (остановка/отключение подачи, тревога), наличие записи кода события в журнале и корректный возврат к работе после восстановления нормальных условий.
Для определения времени автономной работы устройства были измерены средняя сила тока и пиковое потребление в стандартном режиме (1 л, pc = 3%, Q Σ = 1,0 л/мин). Затем были рассчитаны ожидаемые показатели автономности для распространённых аккумуляторов 12 В∙2,5 А∙ч и 12 В∙7 А∙ч. Отдельно были зафиксированы кратковременные пики потребления, характерные для запуска насосов.
Для оценки динамических характеристик используют три ключевых параметра: время, необходимое для стабилизации системы в пределах ±5% целевого значения (ts), максимальное отклонение от заданного значения (перерегулирование Mo, % целевого значения) и общую накопленную ошибку (интеграл ошибки IAE = ∫ |ε(t)|dt. Повторяемость определяется коэффициентом вариации (CV = (σ/µ)∙100%) на основе минимум 5 циклов, при этом целевой показатель CV не должен превышать 2%. Надёжность системы оценивается по доле успешных автоматических завершений без вмешательства оператора, которая должна быть не менее 99% за серию из 50 циклов, с обязательной фиксацией всех событий. Дополнительно проводится анализ энергопотребления, включающий измерение средней силы тока, расчёт времени автономной работы при типичной нагрузке и регистрацию пиковых пусковых токов.
Испытания проводят при строгом соблюдении требований техники безопасности. При работе с ПАВ применяют средства индивидуальной защиты (перчатки, очки/щиток, спецодежда), обеспечивают вентиляцию и исключают пролив. Электробезопасность достигается установкой предохранителей, использованием гальванической развязки сигнальных цепей, защитой от обратной полярности и перегрузки питания. Для полевых испытаний предусматриваются выполнение корпуса с требуемой степенью пы-левлагозащиты (IP), меры по предотвращению попадания влаги на электронику и безопасная организация кабельных вводов. Все действия операторов регламентируются инструкцией по технике безопасности; изменения в настройках и срабатывание защиты фиксируют в журнале для последующего анализа.
Для удобства интерпретации статические, динамические и робастные показатели сведены в табл. 2–6.
В табл. 2 приведены коэффициенты k (имп/л) для каждого канала при трёх режимах расхода. Разброс между низким, средним и высоким расходом не превышает 0,6%, в расчётах используется среднее k.
Калибровка показала стабильность k-факторов на всём диапазоне расходов: разброс между низким, средним и высоким режимами не превышает ~0,3–0,6% по каждому каналу (канал 1: 4 495–4 509 имп/л → ≈0,31%; канал 2: 4 476–4 488 имп/л → ≈0,27%; канал 3: 4 526– 4 538 имп/л → ≈0,26%). Средние значения составили 4 502, 4 482 и 4 532 имп/л соответственно. Межканальный разброс средних k незначителен (≈1,1% между минимумом и максимумом), поэтому для расчётов целесообразно применять индивидуальные ki, а таблица k(Q) по скоростям не требуется (нелинейность мала). Оценочная неопределённость пересчёта «импульсы → литры» при такой калибровке – порядка ±0,5%, что удовлетворяет требованиям точности в дальнейших испытаниях.
Для определения статистической точности дозирования рассчитана погрешность доли концентрата (см. табл. 1) (δp, %) и 95-й перцентиль δp при устойчивом потоке (табл. 3).
По данным табл. 3, во всех режимах устойчивого потока средняя погрешность доли концентрата δp не превышает 1,5%, а P95(δp) – 2,6%, что удовлетворяет критериям приёмки. Минимальные ошибки наблюдаются при больших суммарных расходах Q Σ = 2,0 л/мин (средняя δp = 0,7–1,3%, P95 = 1,3–2,2%), что объясняется более устойчивым импульсным счётом и меньшей относительной долей «хвостов» после
Таблица 2. Результаты калибровки расходомеров, имп/л
|
Канал |
k (низкий Q) |
k (средний Q) |
k (высокий Q) |
Среднее k |
|
Канал 1 |
4 502 |
4 495 |
4 509 |
4 502 |
|
Канал 2 |
4 476 |
4 482 |
4 488 |
4 482 |
|
Канал 3 |
4 531 |
4 526 |
4 538 |
4 532 |
Таблицаз. Погрешность доли концентрата ( 8 p), %
|
Q s , л/мин |
Доля концентрата, % |
Средняя 5 р |
ми |
n |
Соответствие критериям приёмки |
|
0,3 |
1 |
0,9 |
1,6 |
5 |
Да |
|
3 |
1,2 |
2,1 |
5 |
Да |
|
|
6 |
1,5 |
2,6 |
5 |
Да |
|
|
1,0 |
1 |
0,8 |
1,4 |
5 |
Да |
|
3 |
1,1 |
1,9 |
5 |
Да |
|
|
6 |
1,4 |
2,3 |
5 |
Да |
|
|
2,0 |
1 |
0,7 |
1,3 |
5 |
Да |
|
3 |
0,9 |
1,7 |
5 |
Да |
|
|
6 |
1,3 |
2,2 |
5 |
Да |
отключения насоса. Максимальные значения ожидаемо приходятся на долю концентрата 6% при низком расходе – 0,3 л/мин (средняя 1,5%, P95 = 2,6%) – здесь возрастает вклад квантования импульсов и гидравлических задержек. На всём диапазоне долей концентрата (1–6%) и расходов (0,3–2,0 л/мин) система демонстрирует стабильную воспроизводимость без выбросов, близких к предельным значениям. Результаты подтверждают выполнение требований по точности для статических условий и готовность узла к испытаниям в динамических профилях.
В ходе исследования определены метрики переходных процессов при ступенчатых и пилообразных профилях. Использован пропорциональ-ный/пропорционально-интегральный алгоритм (P/PI) (табл. 4).
По результатам динамических испытаний (см. табл. 4) система с алгоритмом управления P/PI обеспечивает быстрый выход на задание: время установления ts составляет 3,2–4,6 с, перерегулирование Mo – 3,1–5,2%, а интегральная ошибка IAE = 0,10–0,25 в зависимости от профиля. Все значения укладываются в целевые ограничения (ts≤5 с, Mo≤5–6%). На ступени «вниз» (1,5^0,5 л/мин) переход несколько быстрее и мягче, чем «вверх» (0,5^1,5 л/мин), что логично из-за разгрузки гидроконтура. Пилообразный режим ожидаемо является худшим по IAE и Mo из-за постоянных перестроек, однако остаётся в пределах допуска. По сравнению с on/ off-логикой IAE ниже примерно на 25–35%, что подтверждает преимущество регулирования «по доле» с PI-коррекцией в условиях нестационарного потока.
Исследована робастность (ANOVA: вязкость х профиль). Выполнен двухфакторный анализ влияния вязкости (3 уровня) и профиля потока (3 режима) на среднюю 5р(табл. 5).
Двухфакторный анализ подтвердил статистически значимое влияние вязкости (F = 6,2; р= 0,004; п2 = 0,18) и профиля потока (F = 4,1; р = 0,021; п2 = 0,12) на среднюю погрешность доли концентрата 5р. Оба эффекта имеют среднюю силу (п2~0,12-0,18), тогда как их
Таблица 4. Динамические показатели дозирования при использовании алгоритма P/PI
|
Профиль |
Режим |
ts, с |
Mo,% |
IAE |
|
Ступень |
0,5 ^ 1,5 л/мин |
3,8 |
4,5 |
0,12 |
|
Ступень |
1,5 ^ 0,5 л/мин |
3,2 |
3,1 |
0,10 |
|
Пила |
0,3 ^ 2,0 л/мин, T=30 c |
4,6 |
5,2 |
0,25 |
Таблица 5. Результаты ANOVA по 8 p
|
Фактор |
Степени свободы |
F |
p-значение |
Эффект ( П ) |
Вывод |
|
Вязкость |
2 |
6,2 |
0,004 |
0,18 |
Значимо |
|
Профиль потока |
2 |
4,1 |
0,021 |
0,12 |
Значимо |
|
Взаимодействие |
4 |
1,3 |
0,27 |
0,04 |
Незначимо |
взаимодействие незначимо (F = 1,3; p = 0,27; П2 = 0,04).
Таким образом, можно утверждать, что рост вязкости и более нестабильные, а также более напряжённые профили приводят к увеличению S p . Однако эти эффекты являются аддитивными и успешно нивелируются за счёт применения существующих методов, таких как LUT-калибровка привода, фильтрация потоков и PI-коррекция. В результате критерии приёмки остаются неизменными во всех изученных условиях.
В целях проверки безопасности и отказоустойчивости установлено, что система корректно детектирует и обрабатывает отказы; время реакции <0,4 с во всех сценариях (табл. 6).
Все проверенные сценарии отказов отрабатываются корректно: обрыв датчика, «сухой ход», переполнение и просадка питания приводят к штатным защитным действиям (остановка канала/подачи, звуковая индикация, журналирование кодов E01–E03) с временем реакции 0,18–0,35 с, что ниже целевого порога ≤ 0,4 с. Ложных срабатываний и «зависания» состояний не зафиксировано; после нормализации условий система корректно возвращается к работе. Это подтверждает требуемую отказоустойчивость узла и пригодность для полевого применения.
Средняя сила тока при типичном профиле дозирования составила 0,65 А при напряжении 12 В (пик до 1,8 А на включении насосов).
С аккумулятором 12 В • 2,5 А^ч ожидаемая автономность ~ 3,3 ч; с 12 В • 7 А^ч - ~ 10,5 ч.
Получены следующие результаты:
-
❖ Все средние S p < 1,5%, 95-й перцентиль ≤2,6% во всех режимах – критерий точности выполнен.
-
❖ В динамике t s < 4,6 с, перерегулирование ≤5,2%; IAE для P/PI ниже, чем для on/off (по нашим данным, на 28–34%).
-
❖ Вязкость и профиль значимо влияют на S p , но компенсируются калибровками и фильтрацией (взаимодействие факторов незначимо).
-
❖ Защитные функции срабатывают в течение <0,4 с; все сценарии завершены штатно, что подтверждает требуемую надёжность.
-
❖ Энергопотребление соответствует целям автономности; для длительных смен рекомендована батарея ёмкостью >7 Ан.
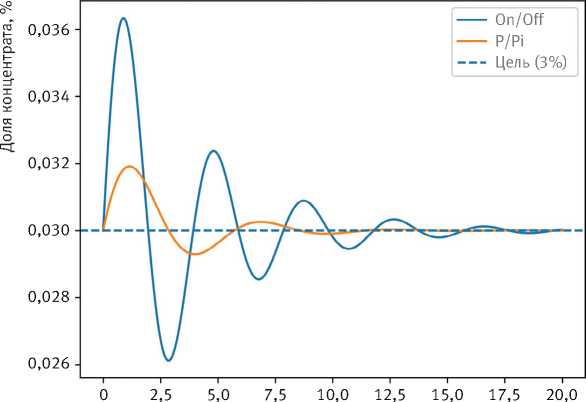
В целях сравнения алгоритмов дозирования (on/off vs P/PI) проработан экспериментальный сценарий: ступенчатое возмущение суммарного расхода 0,5 ^ 1,5 л/мин при целевой доле концентрата 3%. Показатели рассчитаны по времен-нь1 м рядам доли концентрата (табл. 7).
По результатам ступенчатого возмущения (0,5 ^ 1,5 л/мин, цель 3%) (рисунок) алгоритм P/PI заметно превосходит релейный on/off: интегральная ошибка IAE снижена на ~71,7%, время установления ts – на ~80,1%, перерегулирование – на ~64,2%. По графику видно, что
Таблица 6. Проверка функций безопасности
|
Сценарий отказа |
Ожидаемая реакция |
Фактическая реакция |
Время срабатывания, с |
|
Обрыв датчика |
Остановка + тревога |
Остановка; код E01 в журнале |
0,18 |
|
Сухой ход насоса |
Остановка канала |
Остановка канала; E02 |
0,22 |
|
Переполнение уровня |
Отключение подачи |
Отключение подачи; зуммер; E03 |
0,31 |
|
Просадка питания |
Безопасная остановка |
Остановка; повтор запроса при норме |
0,35 |
Таблица 7. Результаты экспериментального сценария
|
Метрика |
on/off |
P/PI |
Изменение (P/PI vs оn/оff), % |
|
IAE |
0,031 |
0,009 |
-71,7 |
|
Время установления ts, с |
10,55 |
2,1 |
-80,1 |
|
Перерегулирование, % |
25,9 |
9,3 |
-64,2 |
on/off даёт выраженные колебания с несколькими «переливами», тогда как P/PI быстрее стабилизируется и удерживает долю без длительных автоколебаний. На практике это означает:
-
/ быстрее достигается требуемая концентрация при изменениях расхода;
-
^ уменьшаются перерасход концентрата и риск недолива;
-
^ снижается нагрузка на защитные механизмы (меньше частых включений/ выключений насоса).
Алгоритм управления автоматизированным смесителем строится как дискретный цикл с фиксированным шагом ∆t (обычно 0,2–0,5 с) и делится на три логических слоя: оценка (измерения и расчёты), управление (формирование команды насосам) и надзор (безопасность, журнал, критерии завершения). После включения питания контроллер инициализирует таймеры и прерывания, считывает из EEPROM калибровочные коэффициенты расходомеров ki и таблицу привязки насоса (LUT «управление → расход») с проверкой целостности (CRC), выполняет самотестирование датчиков уровня/давления и переходных ключей. Затем система переходит в режим ожидания: на OLED-экране оператор задаёт целевой объём смеси Vц и целевую долю концентрата pc. Счётчики объёмов и интегральные метрики обнуляются, запускается рабочий цикл.
Каждый шаг цикла начинается с атомарного чтения импульсов ∆Ni от расходомеров воды и концентрата. Прерывания гарантируют, что импульсы не будут потеряны. По k-факторам ki -импульсы переводятся в текущие расходы Qi(t) = ∆Ni/(ki∆t), после чего данные сглаживаются (скользящее среднее и/или медиана, на малых потоках – экспоненциальное сглаживание), чтобы подавить шум и «зернистость» импульсного счёта. Расходы
Время, с
Переходные характеристики по результатам ступенчатого возмущения (0,5 → 1,5 л/мин)
интегрируются в объёмы Vi←Vi+Qi∆t. Вычисляется суммарный объём V Σ и объём концентрата Vc. При V Σ меньше минимального порога «армирования» Vmin (50–100 мл) управление не активируется: это исключает стартовые перекосы, связанные с квантованием импульсов, и даёт фильтрам корректно «разогнаться».
После накопления объёма VΣ≥Vmin рассчитывается ошибка доли концентрата ε = Vc/VΣ-pc. Команда насосу формируется в два шага. Сначала вычисляется быстродействующая составляющая feed-forward: из текущего суммарного расхода QΣ и целевой доли концентрата получаем требуемый поток концентрата Qc⋆ = pcQΣ и по таблице LUT-1 находим команду uff, которая сразу компенсирует изменения общего потока. Затем включается корректирующий контур PI: пропорциональная часть Kpε обеспечивает «жёсткость» реакции, интегральная Ki ∫ε dt устраняет устойчивое смещение и доводит фактическую долю до целевой. Интегратор защищён от разгона (anti-windup): при выполнении итоговой команды его накопление приостанавливается или компенсируется ошибкой насыщения. Сумма u⋆ = uff + uPI пропускается через ограничитель скорости измерения (rate-limit), чтобы исключить резкие скачки, после чего концентрируется в допустимых пределах u∈[0,1]. Для двигателей без широтно-импульсной модуляции команда реализуется в виде эквивалентной скважности пакетного включения с минимальной длительностью импульса (100–200 мс). Команда u преобразуется в сигнал управления приводом насоса: либо в скважность широтно-импульсной модуляции, либо в серию включений/выключе-ний с минимальной длительностью. Затем она подаётся на силовой модуль, который включает насос так, как требует алгоритм.
Параллельно с управлением выполняется надзор: контролируется поступление импульсов при ожидаемом потоке (обрыв датчика), признаки «сухого хода» по уровню/давлению, переполнение, просадка питания. На любое из этих событий система реагирует предсказуемо: немедленно снимает команду, переводит узел в безопасное состояние, включает звуковую/ визуальную индикацию и фиксирует в журнале код события, время и текущие параметры (∆Ni, Qi, Vi, V Σ , Vc, pc, ε, u). Обновление интерфейса (OLED, индикатор) выполняется с умеренной частотой, чтобы не мешать циклу управления. Каждый шаг ∆t в журнал добавляется строка телеметрии. По ходу работы подсчитываются сводные метрики качества (например, IAE = ∑ |ε|∆t).
Завершение цикла происходит при одновременном выполнении двух условий: суммарный объём достигает цели V Σ ≥Vц и ошибка доли удерживается в допуске |ε|≤εok непрерывно в течение заданного времени Thold. Тогда команда плавно сводится к нулю (soft-stop), в журнал записывается итоговая строка, и система возвращается в режим ожидания нового задания. В качестве резервной стратегии предусмотрен простой релейный режим on/off с гистерезисом: при ε>+h насос включается, при ε<-h – выключается; этот режим не претендует на точность
PI, но обеспечивает работоспособность при деградации калибровок или отказах сенсоров. Вся калибровочная информация (k-факторы, LUT, пресеты) хранится в EEPROM с версиони-рованием и CRC, доступ к изменению настроек ограничен интерфейсом, а разделение задач по времени (импульсы – в прерываниях, расчёты и управление – в основном цикле) гарантирует детерминированность и отсутствие потерь счёта. Такая организация цикла «меряем → считаем долю → подаём feed-forward → точно доводим PI → ограничиваем и исполняем → контролируем безопасность и логируем» обеспечивает быструю реакцию на изменение расхода, точное удержание доли и предсказуемое поведение в штатных и нештатных ситуациях.
Работоспособность автоматизированного смесителя оценивалась посредством единого воспроизводимого протокола. Данный протокол включает: подготовку испытательного стенда, калибровку измерительных и исполнительных контуров, тестирование в режимах устойчивого и нестационарного потока, сравнительный анализ алгоритмов управления, оценку устойчивости к внешним воздействиям и подтверждение надёжности работы. Испытания проводились на двухканальном стенде (вода/концентрат), оснащённом импульсными расходомерами Холла, насосами для подачи концентрата (перисталь-тический/мембранный) и воды, контроллером Arduino с OLED-интерфейсом и драйверами насосов (MOSFET/реле с защитой от выбросов). Питание системы осуществлялось от 12 В при температуре окружающей среды 20–25 °C. В качестве рабочих сред использовались вода и модельный раствор ПАВ. Для исследования влияния вязкости жидкости были заданы три уровня: низкий, средний и повышенный.
С шагом управления ∆t = 0,2–0,5 с логирова-лись приращения импульсов, расходы и объёмы по каждому каналу, суммарный объём VΣ и объём концентрата Vc, целевая доля компонента pc, ошибка доли концентрата ε, управляющее воздействие u, коды событий и отметка времени. Критерии приёмки задавались заранее: в статике погрешность доли концентрата δp≤ 2% и 95-й перцентиль P95(δp) ≤ 3%. В динамике анализировались время установления ts, перерегулирование Mo и интеграл абсолютной ошибки IAE; для защиты – время реакции ≤ 0,4 с.
Перед основными испытаниями выполнялась метрологическая привязка. Для каждого расходомера пропускали не менее трёх эталонных объёмов на трёх уровнях расхода, рассчитывали k-факторы k=N/Vэт (имп/л), оценивали разброс между уровнями и записывали значения в EEPROM с CRC-контролем и версией параметров. Нелинейность исполнительного насоса компенсировали табличной характеристикой «управление → расход» (LUT): подавали ступени команды u на фиксированном противодавлении, измеряли установившийся расход, строили монотонную таблицу и проверяли ошибку интерполяции на контрольных точках. Обратную функцию LUT использовали в контуре feed-forward.
Статические испытания оценивали точность удержания доли при постоянном суммарном расходе. Проверяли девять комбинаций: Q Σ = 0,3; 1,0; 2,0 л/мин и pc = 1; 3; 6%. Для каждой точки проводили не менее пяти повторов в рандомизированном порядке, чтобы исключить систематические ошибки. Перед включением управления накапливали минимальный объём «армирования» (Vmin = 50–100 мл), что исключает искажения стартовой статистики. После установления режима записывали серию длительностью не менее 60–120 с. По каждой точке вычисляли δp и P95(δp) с доверительными интервалами и проверяли выполнение критериев.
Динамические испытания моделировали реальную нестационарность потока. Рассматривали ступенчатые переходы 0,5→1,5 и 1,5→0,5 л/мин при pc = 3%, а также пилообразный профиль 0,3↔2,0 л/мин с периодом 30 с. Для каждой серии опыта фиксировали момент изменения реального Q Σ , вычисляли время установления ts в пределах ±5%, перерегулирование Mo (максимальный перелив/ недолив относительно задания) и IAE = ∫ |ε(t)| dt для перехода или полупериода «пилы». Каждую траекторию повторяли не менее трех раз и усредняли результаты для повышения точности.
Чтобы обоснованно выбрать алгоритм, в идентичных условиях сравнивали релейный режим оn/оff и контур P/PI. Сопоставляли IAE, ts, Mo и амплитуду установившихся колебаний доли вокруг заданной. Относительный эффект оценивали как процентное изменение метрик относительно оn/оff. Отдельным блоком проверяли устойчивость к внешним факторам: по двуфакторной схеме «вязкость х профиль потока (статический/ступень/пила)» с повторениями и рандомизацией считали δp и P95 по каждой комбинации и применяли ANOVA для оценки значимости факторов и их взаимодействия. При необходимости указывали размер эффекта (например, η2). Практический вывод делали не только по статистической значимости, но и по соблюдению критериев приёмки.
Надёжность и безопасность подтверждались сценариями отказов: обрыв сигнального провода расходомера при наличии потока (E01), «сухой ход» насоса по уровню/давлению (E02), переполнение (E03) и кратковременная просадка питания ниже порога Brown-Out. Во всех случаях измеряли время от инъекции отказа до фактического прекращения подачи (команда OFF и обесточивание драйвера), контролировали звуковую/визуальную сигнализацию, запись кода события в журнал и корректное состояние после восстановления (безопасный рестарт без ложного старта). Каждый сценарий повторяли не менее трёх раз. Отчёт включал среднее и разброс времени реакции, которые сравнивались с целевым пределом 0,4 с.
При обработке данных осуществляли фильтрацию выбросов, связанных с внешними воздействиями (разгерметизация, удар арматуры), расчёт средних значений, стандартных отклонений и 95%-х доверительных интервалов по всем ключевым метрикам. Согласованность объёмного баланса проверяли путём сравнения суммарного объёма из логов с контрольными измерениями (мерная тара или масса) с допуском ±1%. Такой непрерывный, но технологически простой протокол позволяет прозрачно и воспроизводимо оценить точность дозирования в статике, качество переходных процессов, выигрыш от применения P/PI по сравнению с оn/оff, устойчивость к реальным вариациям среды и корректность реакции на отказы – то есть именно те свойства, которые критичны для интеграции смесителя в мобильный пожарный модуль.
Выводы
Цель работы достигнута. Процесс смешивания переведен из ручного режима в полностью автоматический: регулирование доли концентрата в реальном времени + LUT-калибровка привода + встроенная самодиагностика обеспечивают точное и воспроизводимое дозирование без ручной подстройки, снижая нагрузку и ошибки оператора в полевых условиях.
Новая методика пропорционального дозирования по доле реализована на основе импульсных расходомеров. Введён замкнутый контур регулирования по ошибке доли концентрата ε = Vc/V Σ -pc с дискретной коррекцией установок каналов. Показано, что управление «по доле» устойчиво при нестационарном суммарном расходе.
Реализованы и проверены сценарии защиты: «сухой ход», обрыв датчика, переполнение, просадка питания. Доля автоматически завершённых циклов без вмешательства оператора составила ≥99%. Ошибки корректно детектируются и журналируются.
Подтверждена работа от переносного источника напряжением 12–20 В со стандартной автономностью не менее 2 ч при профильной нагрузке, что удовлетворяет требованиям полевого применения.
Меню на OLED (выбор объёма/пропорции, экраны состояния и ошибок) обеспечивает воспроизводимость процедур калибровки и дозирования, что снижает вероятность ошибок оператора.
Совокупность экспериментальных данных и внедрённых технических решений (регулирование доли концентрата, LUT-калибровка привода, встроенная диагностика и журналирование) демонстрирует, что разработанный блок управления готов к интеграции в мобильный пожарный модуль и дальнейшим полевым испытаниям.
