Разработка и промышленное внедрение электромеханических силокомпенсирующих систем управления усилиями в исполнительных механизмах шарнирно-балансирных манипуляторов

Автор: Алтунян Лермонт Левикович, Пятибратов Георгий Яковлевич, Сухенко Николай Александрович, Даньшина Анжела Александровна
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 2 т.18, 2018 года.
Бесплатный доступ
Создание и широкое применение за рубежом интеллектуальных грузоподъемных манипуляторов, позволяющих осуществлять перемещение рабочим, прикладывая усилия непосредственно к грузу, делает актуальным задачу модернизации отечественных манипуляторов, система управления которых построена по принципу регулирования скорости движения груза и имеющая ряд недостатков при их эксплуатации. Осуществление перемещения груза, воздействуя непосредственно на него, может быть реализовано на манипуляторах отечественного производства с применением силокомпенсирующей системы управления. Принцип работы такой системы заключается в компенсации при помощи электродвигателей гравитационных и других сил, препятствующих движению груза, а также в создании и поддержании неизменными в точках подвеса груза усилий, равных его весу. При этом движение груза осуществляется под действием внешних усилий. В результате данной работы обоснована целесообразность применения силокомпенсирующей системы управления. Произведен выбор необходимого оборудования и модернизация манипулятора отечественного производства для перемещения грузов типа ШБМ-150М. Экспериментально определены технические характеристики и функциональные возможности первого отечественного манипулятора ШБМ-150МИ с силокомпенсирующей системой управления.
Манипулятор интеллектуальный, силокомпенсирующая система, модернизация, синхронный электропривод, система управления
Короткий адрес: https://sciup.org/147232687
IDR: 147232687 | УДК: 67.05 | DOI: 10.14529/power180211
Development and commercial introduction of electromechanical force compensation control systems in articulated balanced manipulator actuators
As the intelligent lifting manipulators allowing for the load being moved by workers' directly applied have been created and are now widely used abroad, the task of modernizing Russian manipulators becomes quite relevant. The manipulator control system is based on the load movement velocity control principle and has several operational disadvantages. Moving loads with direct effort can be implemented in the Russian manipulators using force a compensation control system. Such system functions based on the principle of compensating for the gravity and other forces, obstructing the load movement, with electric motors as well as of creating and maintaining stable efforts, equal to the load weight, at the points of its suspension. In this case, the load is moved by the external forces. The paper proves the applicability of force compensation system. It presents the he necessary equipment for the Russian ShBM-150M retrofit manipulator. The technical characteristics and functional capabilities of the first Russian SHBM-150MI manipulator with a force compensation control system were determined based on experiment.
Текст научной статьи Разработка и промышленное внедрение электромеханических силокомпенсирующих систем управления усилиями в исполнительных механизмах шарнирно-балансирных манипуляторов
Актуальность работы
Промышленные манипуляторы и роботы находят применение для обслуживания технологических линий и погрузочно-разгрузочных работ. Они определяют возможность широкого применения таких средств для механизации и автоматизации технологических операций при перемещении грузов малой и средней массы, что позволяет освободить рабочих от однообразных, утомительных операций. Эти возможности делают их более универсальными в использовании по сравнению с другими подъемно-транспортными машинами.
В настоящее время появились манипуляторы, реализованные с применением принципа силоком-пенсации, основанного на управлении усилиями в их исполнительных механизмах.
Зарубежные фирмы Indeva (Италия) [1], Dalmec (Италия) [2], Famatec [3] (Италия), Gorbel (США) [4] осуществляют серийный выпуск манипуляторов грузоподъёмностью от 50 до 320 кг, позволяющих перемещать различные грузы со скоростями до 1 м/с путем приложения рабочим незначительных усилий непосредственного к грузу. Такие манипуляторы обеспечивают автоматическую компенсацию веса перемещаемого груза и звеньев, получили название «интеллектуальные». По сравнению с манипуляторами, система управления которых имеет внешний контур регулирования скорости, интеллектуальные манипуляторы обеспечивают более высокую производительность, точность позиционирования, простоту управления и позволяют достаточно быстро перемещать крупногабаритные и хрупкие грузы по сложным траекториям.
Поэтому создание силокомпенсирующих манипуляторов отечественного производства представляет актуальную практическую задачу.
Постановка задачи исследований
Технологический процесс любого производства неразрывно связан с перемещением большого количества грузов, начиная от подачи сырья до выдачи готовой продукции. Важное значение при комплексной механизации процессов труда играют манипуляторы, которые являются связующими звеньями в технологической цепи, обеспечивающими непрерывность производства, определяющих производительность основного технологического оборудования. Многообразие конструкций и типов манипуляторов обусловлено требованиями и условиями применения в конкретном технологическом процессе.
В промышленности широко применяются шарнирно-балансирные манипуляторы (ШБМ), имеющие антропоморфную структуру исполнительного органа, что позволяет перемещать различные грузы при помощи привода вертикальных перемещений [5]. В таких манипуляторах управление перемещением груза в вертикальном на- правлении осуществляется с помощью задатчика скорости, выполненного в виде рукоятки управления, что усложняет его работу и снижает точность позиционирования груза.
Исследования показали, что улучшить технические характеристики и расширить функциональные возможности ШБМ можно, применив принцип управляемой силокомпесации, который можно реализовать с применением современных электроприводов и системы управления усилием в исполнительном механизме (ИМ) манипулятора. Реализация такого технического решения позволит улучшить технические характеристики ШБМ: гибкость и удобство эксплуатации; возможность перемещения груза по требуемой траектории при приложении минимальных усилий рабочего; повысить точность позиционирования крупногабаритных и хрупких объектов. Комплексное решение перечисленных задач можно обеспечить благодаря применению активного способа уравновешивания груза при помощи электропривода и системы управления усилиями в грузозахватном устройстве.
Технические характеристики и функциональные возможности манипулятора ШБМ-150M
Манипулятор отечественного производства ШБМ-150М (рис. 1), выпускаемый ОАО БОМЗ (г. Боровичи, Россия) [6], относится к специальному технологическому грузоподъемному оборудованию. Манипулятор предназначен для выполнения подъемно-транспортных операций, связанных с перемещением в пространстве штучных грузов в пределах зоны обслуживания манипулятора, в частности для загрузки и разгрузки деталей со станков, прессов, термопечей и другого технологического оборудования, а также для перегрузочных операций при обслуживании конвейеров и технологических линий. Преимуществом ШБМ по сравнению с другими грузоподъемными механизмами (электроталями, кранами на колонне, кран-балка-ми), выполняющими аналогичные функции, является жёсткое крепление груза на колонне стрелы манипулятора и широкий диапазон регулирования скорости подъема и опускания груза, а также удобство управления и точность позиционирования груза.
Манипулятор ШБМ-150М имеет следующие основные технические характеристики: максимальная грузоподъёмность 150 кг; радиус обслуживания 0,6…3 м; максимальная высота перемещения груза 1,75 м.
Манипулятор ШБМ-150М (см. рис. 1) состоит из приводной головки 1, установленной на поддерживающей конструкции в виде колонны 2, опорно-поворотного устройства 3, обеспечивающего поворот головки на 360°. Приводная головка имеет шарнирную стрелу, состоящую из плеча 4 и руки 5. На конце руки установлена головка схва-та 6, которая может вращаться вокруг вертикальной оси. Рукоятка задатчика требуемой скорости, установленная на головке схвата, служит для управления вертикальным движением груза, а также для передачи усилий рабочего на груз и стрелу при его горизонтальном движении.
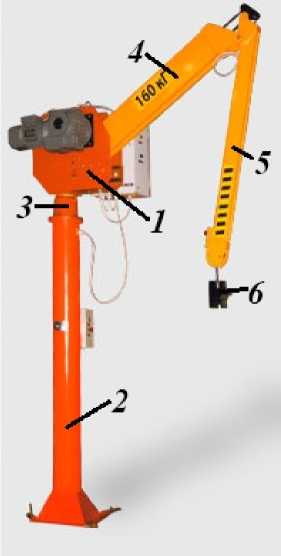
Рис. 1. Внешний вид манипулятора ШБМ-150M
В настоящее время на приводной головке манипулятора ШБМ-150М установлен частотнорегулируемый электропривод с асинхронным мо-тор-редуктором типа DRS80S4 (0,75 кВт, 5,1 Нм, 1400 об/мин, передаточным отношением редуктора 178, реечная передача c диаметром шестерни 0,082 м) с электромагнитный тормозом. Электропривод вертикальных перемещений в функции скорости обеспечивает возможность при вертикальных перемещениях груза плавного изменения скорости в диапазоне от 0,005 до 0,16 м/с.
Управление скоростью вертикального перемещения груза производится рабочим посредством отклонения рукоятки задатчика скорости. При отпускании рабочим рукоятки управления, она под действием пружины устанавливается в нейтральное положение. При этом ИМ с грузом останавливается и удерживается с помощью тормоза.
Рычажная система руки манипулятора сбалансирована с помощью пружинного устройства так, что перемещение головки схвата в радиальном направлении к опорно-поворотному устройству и от него происходит по горизонтали, что обеспечивает перемещение груза в горизонтальной плоскости с минимальными усилиями.
Опыт промышленной эксплуатации ШБМ-150М показал, что существующая система управления манипулятора имеет ряд недостатков:
-
– при вертикальном перемещении груза одна рука рабочего всегда занята для управления задатчиком скорости;
-
– применяется механически сложное и дорогостоящее грузозахватное устройство, совмещенное с задатчиком скорости;
-
– неудобство перемещения крупногабаритных и хрупких грузов;
-
– низкая точность позиционирования перемещаемого груза.
Перечисленные недостатки манипулятора ШБМ-150М не позволяют повысить производительность работы.
Обоснование применения силокомпенсирующей системы и модернизация манипулятора ШБМ-150М
В последнее время за рубежом широкое распространение получили манипуляторы, позволяющие перемещать грузы благодаря приложению рабочим усилия непосредственно к грузу. При этом система управления манипулятора автоматически определяет вес груза и с требуемой точностью его компенсирует.
Рассмотрим возможность применения силокомпенсирующей системы (СКС) для манипулятора ШБМ-150М. Как показывают результаты исследований, приведенные в [7–12], применение СКС позволит:
-
– компенсировать статические нагрузки с помощью электропривода вертикального перемещения груза;
-
– удерживать груз на весу без применения электромагнитного тормоза;
-
– исключить устройство задания скорости;
-
– перемещать и позиционировать объекты двумя руками, что особенно удобно при работе с крупногабаритными и хрупкими грузами;
-
– позиционировать грузы с высокой точностью с приложением минимальных усилий рабочего.
В 2016 году сотрудниками кафедры «Электроснабжение и электропривод» ЮРГПУ (НПИ) (г. Новочеркасск) [13] выполнена модернизация серийно выпускаемого манипулятора типа ШБМ-150М с целью улучшить его технические характеристики и расширить функциональные возможно- сти, благодаря применению СКС при реализации системы управления вертикальным перемещением груза.
Модернизированный манипулятор должен обеспечивать следующие значения основных параметров:
-
- обеспечить перемещения путем приложения усилия непосредственно к грузу массой от 10 до 150 кг;
-
- сопротивление перемещению груза рабочим в вертикальном направлении не более 5 % от значения веса груза;
-
- перемещение груза в вертикальном направлении со скоростью 0…0,16 м/с;
-
- автоматическую настройку системы управления для перемещения груза массой от 10 до 150 кг.
Исследования показали, что для реализации электромеханической СКС манипулятора ШБМ-150М необходимо иметь информацию об усилии в грузозахватном устройстве, о весе перемещаемого груза и внешних силовых воздействиях на него. Это требует применения высоконадежных в эксплуатации датчиков измерения усилий и реализации в системе управления СКС контуров обратных связей по усилию в исполнительном механизме, току двигателя и канала изменения скорости электродвигателя для обеспечения требуемых характеристик электропривода [14–16].
С использованием многофакторного метода выбора электромеханических модулей для СКС [17–18] был произведен расчет требуемых параметров электротехнического оборудования фирмы Sew-Eurodrive [19], приведенного в таблице.
Применение синхронного двигателя типа CMP50M с возбуждением от постоянных магнитов обосновано тем, что он обеспечивает режим стоянки под током. Для питания электродвигателя используются частотный преобразователь MDX61B расширенной версии, имеющий внешний технологический регулятор, необходимый для реализации контура регулирования усилия в ИМ манипулятора. Преобразователь частоты позволяет выполнять параметрическое и программное программирование на языке СИ, что позволило написать программу, обеспечивающую работу СКС.
Выбор датчика усилия и согласующего усилителя осуществлён с учётом класса точности, быстродействия, диапазона рабочих температур.
Основное оборудования фирмы Sew-Eurodrive, необходимое для реализации СКС
|
№ |
Наименование |
Обозначение по каталогу |
Технические характеристики |
|
1 |
Синхронный мотор-редуктор |
FA77R37CMP50M/BK/KY/AK1H/SB1 |
M н =2,4 Нм; I н =1,68 А; n н=3000 об/мин; i Р =338 |
|
2 |
Преобразователь частоты |
MDX61B0008-5A3-4-0T |
P н =750 Вт; I н =2,4 А; I max =4,8 А |
|
4 |
Сетевой дроссель |
ND020-13 |
3 x 380 В; I н = 20 А; L = 0,1 мГн |
|
5 |
Резистор тормозной |
BW072-005 |
R =72 Ом; P н = 0,42 кВт |
Для модернизации манипулятора ШБМ-150М был выбран S-образный тензометрический датчик типа C2H фирмы «Тензо-М» (г. Москва) [20], имеющий предел измерения усилия до 200 кг, класс точности C3, диапазон рабочих температур –30…+50 °С, напряжение питания 12 В. Нормирующий усилитель серии СPJ компании SCAIME (Франция) [21] имеет 4-проводную схему подключения датчика усилия, выходной сигнал по напряжению 0–10 В или по току 4–20 мА, полосу пропускания до 20 кГц.
Экспериментальные исследования ШБМ-150М
Для оценки работы манипулятора были выполнены экспериментальные исследования ШБМ-150М с существующей системой управления и с применением предложенной силокомпенсирующей системы.
На рис. 2 приведена осциллограмма усилия в подвесе груза манипулятора типа ШБМ-150М с асинхронным электроприводом. Переходный процесс усилия получен при минимальном вылете стрелы в режиме остановки груза. Анализ показал, что при остановке груза массой 140 кг и срабатывании электромагнитного тормоза возникают колебания усилия в вертикальной плоскости с частотой ω = 18,7 рад/с. При этом приращение амплитуды первого колебания усилия составляет FК = 280 Н, а декремент затухания λ = 0,24. Выполненные исследования показали, что в зависимости от вылета стрелы и массы груза колебания изменяют свою амплитуду и частоту и могут проявляться в виде биений, обусловленных наличием в механической системе манипулятора двух близких частот, отличающихся менее, чем на 20–30 %.
При установке на манипулятор ШБМ-150М синхронного сервопривода с СКС, имеющей внутренний контур регулирования тока двигателя и внешний контур регулирования усилия в ИМ манипулятора и настройке регулятора усилия, согласно методике, приведенной в [22–25], были выполнены экспериментальные исследования на модернизированном манипуляторе ШБМ-150М.
На рис. 3 приведены графики усилия F, необходимого для приведения груза в движение (рис. 3а) и при перемещении его с постоянной номинальной скоростью (рис. 3б) в зависимости от значения
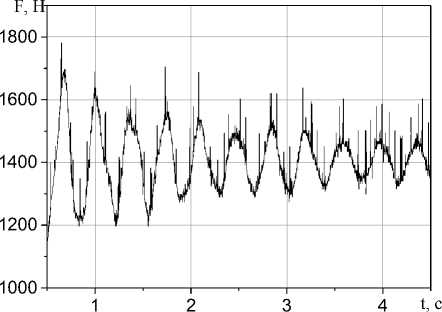
Рис. 2. Осциллограмма усилия в ИМ манипулятора ШБМ-150М
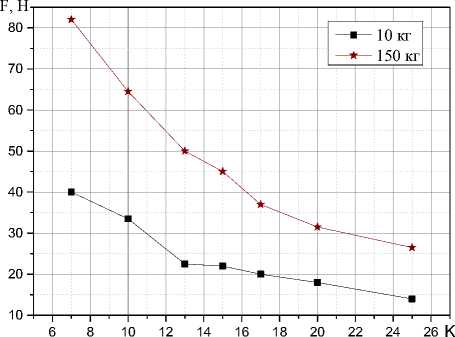
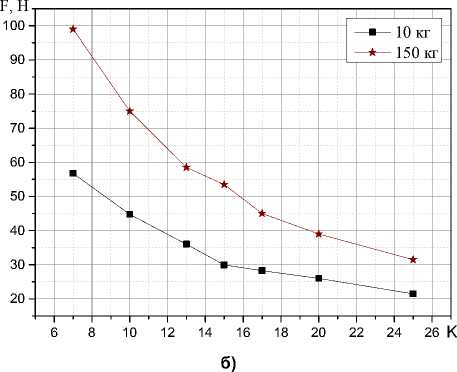
Рис. 3. Экспериментальные зависимости: а – усилия оператора для привидения груза в движение; б – силы сопротивления для перемещения груза с постоянной скоростью
коэффициента усиления контура регулирования усилия. Как видно из графиков рис. 3 при коэффициенте усиления контура регулирования усилия K = 25 усилие, необходимое для приведения в движение груза массой 10 кг, составляет 14 Н, а для перемещения с постоянной номинальной скоростью рабочему необходимо прикладывать усилие 21,5 Н. Для перемещения груза массой 150 кг необходимо приложить к нему внешние усилия 26,5 и 31,5 Н. Исследования показали, что увеличение коэффициента усиления K > 25 приближает систему управления усилия к границе устойчивости.
При реализации в СКС каналов компенсации силы трения покоя и движения удалось уменьшить усилие, прилагаемое рабочим для перемещения груза до значения 6 Н.
На рис. 4 приведены осциллограммы усилия в ИМ манипулятора, скорости, момента и тока двигателя с пропорциональным регулятором усилия при коэффициенте усиления K П = 30 и массе перемещаемого груза 60 кг. Из осциллограммы усилия видно, что в этом случае в механической системе манипулятора наблюдаются упругие колебания с частотой ω = 64,1 рад/с. При этом амплитуда приращения первого колебания усилия составляет F К = 263 Н, а декремент затухания λ = 0,41. Первые наибольшие значения тока I и момента M синхронного двигателя имеют значения 1,41 А и 3 Нм.
Для уменьшения амплитуды колебаний усилий был применен пропорционально-дифференциальный (ПД) регулятор, имеющий коэффициент усиления K = 30 и дифференцирующую постоянную времени T Д = 0,1 c (рис. 5).
Из осциллограммы усилия, приведенной на рис. 5, видно, что при применении ПД-регулятора амплитуда колебания в механической системе и груза стала меньше и затухают они в 2,3 раза быстрее, чем при использовании П-регулятора. При этом частота колебаний усилия составляет ω = 91 рад/с, при приращении амплитуды первого колебания усилия F К = 232 Н и декременте затухания λ = 0,96. В этом случае пиковые значения тока I и момента M синхронного двигателя составили 1,96 А и 3,8 Нм. Применение ПД-регулятора позволило улучшить демпфирование упругих колебаний, но при этом увеличился на 35 % момент электродвигателя, что необходимо для активного демпфирования колебаний усилия в исполнительном механизме манипулятора.
В 2017 году кафедрой «Электроснабжение и электропривод» ЮРГПУ (НПИ) был успешно сдан в опытную эксплуатацию модернизированный манипулятор ШБМ-150М с силокомпенсирующей системой управления усилиями в ИМ. После доработки некоторых технических решений манипулятор прошел производственные испытания. В настоящее время ОАО БОМЗ (г. Боровичи, Россия)
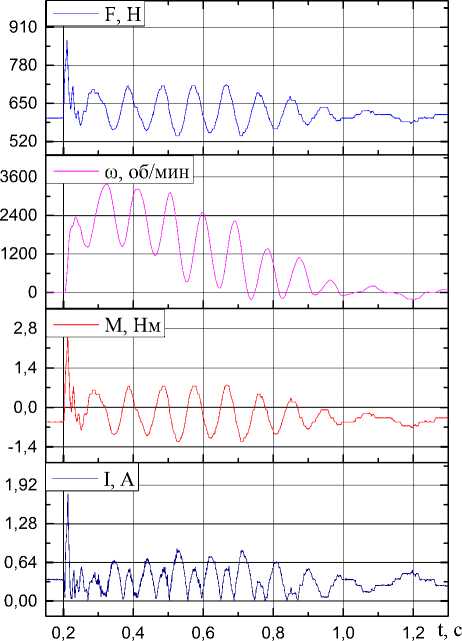
Рис. 4. Осциллограммы усилия, скорости, момента и тока электродвигателя
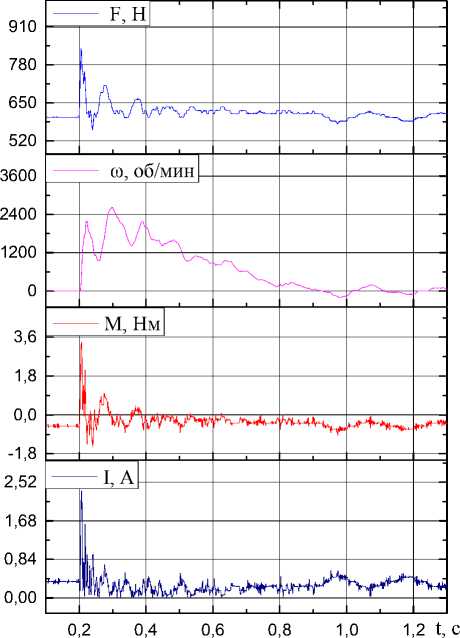
Рис. 5. Осциллограммы усилия, скорости, момента и тока электродвигателя
серийно выпускается первый в России манипулятор с СКС типа ШБМ-150МИ (интеллектуальный) [26].
Применение предложенной СКС и выполненная модернизация электропривода позволила получить первый отечественный манипулятор ШБМ-150МИ с интеллектуальным управлением и начать его серийное производство.
Заключение
Выполненные экспериментальные исследования позволяют сделать следующие выводы:
-
1. Для эффективного управления усилиями в исполнительном механизме манипулятора ШБМ-150МИ во всем диапазоне скоростей перемещения груза необходимо применять синхронные двигатели с возбуждением от постоянных магнитов, так как они обеспечивают длительную стоянку под током и могут развивать номинальный момент при нулевых скоростях.
-
2. Для реализации предложенной силокомпенсирующей системы управления необходимо примять быстродействующие датчики усилия и преобразователи частоты с технологическим регулятором.
-
3. Использование модернизированного манипулятора ШБМ-150МИ с предложенной системой управления усилием повысило его технические и функциональные возможности, что позволяет расширить область его применения и осуществлять перемещение груза массой 150 кг с внешним усилием 32 Н.
-
4. При необходимости уменьшения значений усилий, прикладываемых рабочим для перемещения груза на манипуляторе ШБМ-150МИ, необходимо использовать каналы компенсации сил трения, что позволит уменьшить внешнее усилие до 6 Н.
Список литературы Разработка и промышленное внедрение электромеханических силокомпенсирующих систем управления усилиями в исполнительных механизмах шарнирно-балансирных манипуляторов
- SCAGLIA INDEVA s.p.a. -http://www. indevagroup.com/industrial-manipulators/(дата обращения: 12.03.2018).
- DALMEC. Италия. -http://www.dalmec.com/ru/industrial_manipulators.html/(дата обращения: 12.03.2018).
- FAMATEC. Италия. -http://www.famatec.com/prodotti/mastro (дата обращения: 15.04.2018).
- Gorbel. США. -https://www.gorbel.com/products/ergonomic-lifting/traditional-lifting-devices/gs-series-electric-chain-hoist (дата обращения: 12.03.2018).
- Сбалансированные манипуляторы/И.Л. Владов ; под ред. П.Н. Белянина. -М.: Машиностроение, 1988. -264 с. -(Автоматические манипуляторы и робототехнические системы).
- БОРОВИЧСКИЙ ОПЫТНЫЙ МАШИНОСТРОИТЕЛЬНЫЙ ЗАВОД. Россия. -http://bomz.su/catalog/shbm-150m/(дата обращения: 12.03.2018).
- Даньшина, А.А. Совершенствование сбалансированных манипуляторов с применением активного способа компенсации веса груза/А.А. Даньшина, Л.Л. Алтунян//АЭП-2016: труды. IX Международной (XX Всероссийской) конференции по автоматизированному электроприводу, г. Пермь, 3-7 октября 2016 г./Пермский национальный исследовательский политехнический университет. -Пермь: Изд-во ПНИПУ, 2016. -С. 405-408.
- Пятибратов, Г.Я. Способы и средства совершенствования сбалансированных манипуляторов с электромеханическими силокомпенсирующими системами: моногр./Г.Я. Пятибратов, А.А. Даньшина; ЮРГПУ (НПИ) им. М.И. Платова. -Новочеркасск: Лик, 2016. -194 с.
- Н.А. Сухенко Электромеханические и мехатронные системы управления усилиями промышленных манипуляторов: моногр./Н.А. Сухенко, Г.Я. Пятибратов; Южно-Российский государственный политехнический университет (НПИ) им. М.И. Платова. -Новочеркасск: ЮРГПУ (НПИ) им. М.И. Платова, 2014. -164 с.
- Prospective electromechanical control systems of industrial manipulator efforts/N.A. Sukhenko, G.Ya. Pyatibratov, A.A. Danshina, L.L. Altunyan//International journal of power electronics and drive system (IJPEDS). -2016. -Vol. 7, no. 2. -P. 416-421.
- DOI: 10.11591/ijpeds.v7.i2.pp416-421
- Сухенко, Н.А. Перспективные электромеханические системы управления усилиями промышленных манипуляторов/Н.А. Сухенко, Г.Я. Пятибратов, А.А. Даньшина//Известия вузов. Электромеханика. -2015. -№ 5 (541). -С. 76-81.
- DOI: 10.17213/0136-3360-2015-5-76-81
- Пятибратов, Г.Я. Электромеханические силокомпенсирующие системы подъёмно-транспортных манипуляторов/Г.Я. Пятибратов, Н.А. Сухенко//Вестник ЮУрГУ. Серия «Энергетика». -2014. -Т. 14, № 4. -С. 67-75.
- ЮРГПУ (НПИ). Россия. -http://emf.npi-tu.ru/eie/(дата обращения: 12.03.2018).
- Г.Я. Пятибратов Принципы построения и реализации систем управления усилиями в упругих передачах электромеханических комплексов / Г.Я. Пятибратов //Известия вузов. Электромеханика. -1998. -№ 5. -С. 73-83.
- Пятибратов, Г.Я. Создание и внедрение систем управления усилиями в упругих передачах и исполнительных устройствах электромеханических комплексов/Г.Я. Пятибратов, О.А. Кравченко//Известия вузов. Электромеханика. -2008. -№ 1. -С. 45-56.
- Принципы построения и реализации систем компенсации силы тяжести/О.А. Кравченко, Г.Я. Пятибратов, Н.А. Сухенко, А.Б. Бекин//Известия вузов. Северо-Кавказский регион. Технические науки. -2013. -№ 2. -С. 32-35.
- Пятибратов, Г.Я. Многокритериальный выбор параметров электромеха-нических систем компенсации сил тяжести при вертикальных перемещениях объектов/Г.Я. Пятибратов//Известия вузов. Электромеханика. -1993. -№ 5. -С. 65-70.
- G.Ya. Pyatibratov Methods of efficient parameters multifactorial determination of industrial manipulators gears and electric drives / G.Ya. Pyatibratov, A.A. Danshina, L.L. Altunyan // Procedia Engineering. -2016. -Vol. 150. -P. 1403-1409.
- DOI: 10.1016/j.proeng.2016.07.336
- SEW-eurodrive. Россия. -https://www.sew-eurodrive.ru/glavnaya.html (дата обращения: 12.03.2018).
- Тензо-М. Россия. -https://www.tenso-m.ru (дата обращения: 12.03.2018).
- SCAIME. Франция. -http://www.scaime.com/en/48/produit/strain-gage-conditioner.html (дата обращения: 12.03.2018).
- Дебда, Д.Е. Особенности выбора структуры и параметров управляющих устройств электромеханических силокомпенсирующих систем/Д.Е. Дебда, Г.Я. Пятибратов//Новые технологии управления движением технических объектов: материалы III Междунар. науч.-техн. конф., г. Новочеркасск, 2000 г./Новочеркасск. ЮРГТУ (НПИ). -Новочеркасск: изд-во ЮРГТУ (НПИ), 2000. -Т. 1. -С. 17-20.
- Г.Я. Пятибратов Синтез систем подчиненного регулирования электро-приводов, минимизирующих динамические нагрузки в упругих механических передачах / Г.Я. Пятибратов // Известия вузов. Электромеханика. -1982. -№ 3. -С. 296-303.
- Pyatibratov, G.Ya. Synthesis of an object moving control system with flexible suspension under the action of external forces/G.Ya. Pyatibratov, D.Yu. Bogdanov, A.B. Bekin//Procedia Engineering. -2015. -Vol. 129. -P. 29-36.
- Пятибратов, Г.Я. Синтез системы управления усилиями в исполнительном механизме электромеханического силокомпенсирующего манипулятора/Г.Я. Пятибратов, А.А. Даньшина//Известия вузов. Электромеханика. -2017. -Т. 60, № 3. -С. 45-53.
- DOI: 10.17213/0136-3360-2017-3-45-53
