Разработка и тестирование алгоритма обеспечения минимального угла отклонения главной центральной оси инерции в процессе балансировки летающей модели в одной плоскости коррекции

Автор: Ключников А. В.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 1 т.21, 2020 года.
Бесплатный доступ
Высокая стоимость, сложность разработки летающих моделей обуславливают необходимость применения методов проектирования и изготовления, которые позволили бы обеспечить наилучшие летнотехнические и технологические характеристики модели и максимально повысить эффективность ее эксплуатации. К числу таких методов относится экспериментальный контроль параметров массо-инерционной асимметрии на заключительном этапе общей сборки летающей модели. В статье рассмотрено решение задачи оптимизации процесса приведения параметров массо-инерционной асимметрии летающей модели конической формы к заданным нормативам. Единственная плоскость коррекции конструктивно расположена вблизи торца конуса, на значительном расстоянии от центра масс летающей модели. Балансировка летающей модели проводится в динамическом режиме в составе сборного ротора на низкочастотном динамическом вертикальном балансировочном стенде с газовыми опорами. Перед балансировкой масса, продольное положение центра масс и моменты инерции летающей модели должны быть определены экспериментально с использованием другого измерительного оборудования. В качестве критерия оптимизации принято достижение минимального угла отклонения продольной главной центральной оси инерции относительно геометрической оси летающей модели при одновременном обеспечении заданного норматива по величине смещения центра масс с той же геометрической оси. В работе представлен алгоритм балансировки, легко реализуемый на современных компьютерах. Приведён числовой пример балансировки. Алгоритм позволяет исключить промежуточные шаги балансировки, сократив число шагов балансировки, как правило, до одного шага, а также сократив время проведения балансировочного эксперимента. За один шаг балансировки алгоритм позволяет либо привести параметры массо-инерционной асимметрии летающей модели к заданным нормативам, либо диагностировать невозможность для конкретной конструкции летающей модели обеспечить достижение заданных нормативов.
Массо-инерционная асимметрия, балансировочный стенд, ось симметрии, ось инерции, момент инерции, центр масс, плоскость коррекции, дисбаланс, алгоритм
Короткий адрес: https://sciup.org/148321955
IDR: 148321955 | УДК: 681.828 | DOI: 10.31772/2587-6066-2020-21-1-70-77
Elaboration and testing of the algorithm which ensures an achievement of minimal deviation angle of flying model's main centroidal axis of inertia during her counterbalancing in a sole correction flatness
High complexity and cost of developing flying models necessitate the use of such design and production techniques that would ensure the best flight technical and technological characteristics of the model also would raise of it operation effectiveness. These techniques include the experimental control method of flying model’s mass-inertia asymmetry parameters during final assembly of the model. Solution of the problem of optimization the process of bringing parameters of mass-inertia asymmetry of the conical flying model to specified standards is considered in the article. The only correction plane is designed to be positioned close to cone face, away from the center mass of the flying model. The flying model as a component of prefabricated rotor is being balanced in dynamic mode on a low-frequency dynamic vertical stand, which based on gas bearings. Before balancing experiment the weigh, longitudinal center of mass and inertia moments of the flying model have to be controlled with use of another measurement equipment. As a criterion of optimization is sorted the reaching of minimum of the angle of deviation of principal longitudinal centroidal axis of inertia from geometrical axis of the flying model. But simultaneously the pre-set standard of center-mass shift from the geometrical axis must be ensured. Balancing algorithm, easy-to-realized by modern computers, is presented. Numerical illustration of balancing is given. The algorithm enables omitting intermediate steps of balancing, reducing them to one step (as a rule), and shortening the balancing time, as well. In one step of balancing the engineering model permits either bringing parameters of mass-inertia asymmetry of the flying model to specified standards, or diagnosing impossibility of attaining the specified standards with available design of flying model. The algorithm and balancing method are experimentally tested at newly-designed vertical dynamic stand on conical gas bearings. It’s high precision and efficiency are corroborated.
Текст научной статьи Разработка и тестирование алгоритма обеспечения минимального угла отклонения главной центральной оси инерции в процессе балансировки летающей модели в одной плоскости коррекции
Введение. В ракетно-космической отрасли при проектировании космических аппаратов (КА) значительную часть проектного времени занимает разработка жидкостных ракетных двигателей малой тяги (ЖРДМТ). При помощи данного типа двигательных установок КА может совершать сложные манёвры в космосе [1; 2].
Терминологически ЖРДМТ определяются ГОСТ 22396-77 «Двигатели жидкостные малой тяги» как исполнительные органы системы управления космического летательного аппарата с тягой от 0,01 до 1600 Н. ЖРДМТ могут объединяться в блок ЖРДМТ в качестве сборочной единицы, состоящей из нескольких ЖРДМТ, объединенных хотя бы одним общим элементом (силовая рама, панель, система подвода топлива, теплоизоляция и др.).
Назначение ЖРДМТ и условия их эксплуатации предъявляют к ним целый ряд специфических требований, в частности, следующие:
-
- многорежимность, обусловленная работой в непрерывном (длительность до Т в > 103 с) и различных импульсных режимах с минимальным временем включения 0,03 с и менее и с различными паузами - от 0,03 с до нескольких суток. Импульсный режим подразделяется на режим одиночных коротких включений с большими паузами между включениями ; импульсный режим, когда чередуются короткие включения с паузами различной продолжительности; режим «связанных» включений при очень коротких паузах;
-
- большой ресурс по суммарному времени работы - до 50000 с и более;
-
- большой ресурс по суммарному количеству включений - до 106;
-
- возможность любого сочетания времени включений и пауз;
-
- обеспечение высокой экономичности, удельный импульс ( I уд ) свыше 2950 Нс/кг (300 с) для двухкомпонентных ЖРДМТ на самовоспламеняющейся паре «азотный тетраоксид (АТ) и несимметричный демитилгидразин (НДМГ)»;
-
- высокая надежность при эксплуатации более 10 лет, что требует обеспечения приемлемого теплового состояния как при работе двигателя, так и в период длительного молчания.
ЖРДМТ должны обладать высокими показателями надёжности, минимальной массой и габаритными размерами, повышенным ресурсом, эффективностью, стабильностью, минимальным энергопотреблением. Обеспечение высокого уровня указанных показателей на всех этапах эксплуатации ракетного двигателя требует точного контроля диагностических параметров (ДП) с последующим прогнозированием технического состояния [3; 4]. Для этих целей КА снабжают системой функциональной диагностики (СФД), позволяющей оперативно получать диагностическую информацию о ЖРДМТ, обрабатывать данные и выдавать решение о стратегии дальнейшей эксплуатации. В СФД алгоритмы мониторинга ДП и обнаружения неисправности основываются на математических моделях рабочих процессов [5-8].
На сегодняшний день, развитие ракетной техники невозможно без телеметрии на двигателях КА. Средства телеметрии выполняют сбор и преобразование сигналов датчиков, хранения и передачу информации в центр управления. Использование телеметрии позволяет повысить информативность и полноту испытаний ЖРДМТ, сократить их количество и рационализировать планирование в кратчайшее время [9 ; 10].
Основные задачи диагностирования ЖРДМТ с использованием телеметрических средств следующие [11]:
-
- определение правильности функционирования двигателя при всех возможных режимах работы;
-
- выявление неисправности с указанием места и возможной причины возникновения;
-
- оценка показателей надёжности;
-
- прогнозирование правильности функционирования двигателя при дальнейшей эксплуатации.
Несмотря на большие успехи в разработке ЖРДМТ и методов их диагностирования, определить всё множество неисправностей практически невозможно. Это связано с тем, что нарушения целостности комплектующих двигателя и рабочих процессов могут одинаково проявляться в диагностических признаках. К тому же конструкции и расположение датчиков несовершенны, в результате чего при оценке ДП возникают ограничения в точности результатов [11], а в случае большой совокупности диагностических данных трудно определить степень их взаимозависимости и весомости при определении технического состояния.
Сегодня указанные проблемные задачи успешно решаются расчетными методами с применением искусственных нейронных сетей (ИНС). Это обусловлено способностью ИНС обучатся аппроксимировать функции и экстраполировать, разделять множество диагностических данных на классы и отбирать наиболее информативные признаки, несущие в себе наиболее полную информацию о скрытых законах состояния системы. Все перечисленные операции ИНС может выполнять параллельно в условиях ограниченной информации [12–14].
В связи с вышеизложенным, целью работы является разработка метода прогнозирования технического состояния ЖРДМТ с использованием ИНС при обработке телеметрических данных.
Выбор определяющих телеметрических данных для ИНС. Срок активного существования КА в космическом пространстве ограничен запасами топлива на борту и может быть увеличен за счёт повышения эффективности его использования. В зависимости от выполняемых задач ЖРДМТ должны работать в непрерывном и импульсном режимах. При работе в импульсном режиме ЖРДМТ должен обладать минимальным временем выхода на установившийся режим при включении двигателя и минимальным временем спада тяги при его выключении. Число включений двигателя в процессе работы составляет сотни тысяч, поэтому влияние неэкономичности использования топлива существенно. Для двигателей системы управления большое значение имеет обеспечение минимальной и стабильной величины импульса последействия тяги. Импульс последействия является, в основном, функцией быстродействия клапанов, заклапанных объёмов и количества непрореагировавших компонентов топлива.
Высокий уровень динамических и энергетических характеристик двигателя будет зависеть в большей степени от эффективной организации жидкофазного взаимодействия компонентов топлива, обеспечивающего интенсификацию протекания процессов преобразования топлива в высокотемпературные продукты сгорания двигателя. С другой стороны, для повышения надежности ЖРДМТ необходимо снижать тепловые нагрузки на элементы конструкции.
В спектре колебаний тяги могут быть выделены частотные характеристики двигателя, изменение которых можно использовать как признак нарушения нормального функционирования. Поэтому тяга имеет самостоятельное значение и должна рассматриваться как необходимый ДП при оценке правильности функционирования двигателя [11].
Таким образом, в качестве ДП для ЖРДМТ нужно использовать тягу ( P ), удельный импульс тяги ( I у ) и тепловое состояние конструкции ( Т кон ) [15–17].
При определении указанных ДП общими телеметрическим данными являются [15]:
-
m т – массовый расход топлива, кг/с;
Т топ – температура топлива, К;
-
p k – давление в камере сгорания, Па;
-
t кл – быстродействие клапанов, с;
-
t раб – время работы двигателя, с.
Отобранные признаки наиболее информативны и несут в себе всю информацию о взаимосвязях между ДП. Следовательно, в СФД для ЖРДМТ должен входить полный комплекс телеметрических средств для мониторинга и передачи этих характеристик в ИНС , а также специальный нейросетевой алгоритм.
Возможности ИНС при обработке телеметрических данных ЖРДМТ. В настоящее время к информативности канала передачи телеметрической информации с борта КА предъявляются все более и более серьезные требования [18]. В современных СФД ракетных двигателей ДП делят на медленно и быстро меняющиеся. К первым относят давление, температуру, расход топлива, положение приводов, ко вторым – пульсацию компонентов топлива, вибрации и напряжения корпусных деталей. Медленно меняющиеся измеряются с частотой от 0 до 100 Гц, быстро меняющиеся – с частотой от 100 до 30000 Гц [11]. Датчики телеметрии устанавливают исходя из конструктивных особенностей двигателя, и зачастую они не отвечают требованиям обеспечения необходимой глубины диагностирования.
Скорость передачи в канале телеметрии системы управления КА равная 8 кбит/с считается неудовлетворительной [19] . Повышения информативности канала можно достичь увеличением физической скорости телеметрии за счет повышения частоты диапазона радиоканала и соответственно высоких технических затрат. Другим решением является сжатие информации перед посылкой в канал.
Кроме того, существуют ошибки ориентации и стабилизации КА, которые приводят к колебаниям измеряемых величин, вследствие чего поступающая телеметрическая информация может содержать потерянные участки сеанса связи с КА.
При диагностическом контроле ЖРДМТ в полёте важна не только обработанная телеметрическая информация с минимальными потерями данных, но и её качественная визуализация и анализ. Декодирование записанного сигнала существенно снижает оперативность управления КА. Данная операция требует от 15 до 20 мин., что занимает по времени четверть среднего периода обращения многих малых КА [20; 21].
К перечисленным факторам, затормаживающим процесс оперативного управления КА, так же относится специальное программное обеспечение обработки телеметрической информации.
По этой причине для повышения скорости и точности оперативного анализа телеметрических данных ЖРДМТ в реальном масштабе времени, целесообразно применение ИНС. Как было уже указано, основным преимуществом ИНС перед другими искусственными вычислительными системами является способность к обучению, обобщению и выделению скрытых зависимостей между входными и выходными данными. ИНС позволяют повысить надежность функционирования КА за счет интеллектуального анализа и прогнозирования возможных отклонений параметров бортовых подсистем от установленных нормативных значений. В космической отрасли ИНС все чаще находят применение при решении задач управления, контроля и диагностики [22–24].
Основной функциональной единицей ИНС является нейрон. В нейроны по синапсам поступают данные с датчиков СФД. На выходе данные преобразуются в соответствии с настройками нейронов при помощи различных функций (рис. 1). Входом одного нейрона могут быть выходы других нейронов. Точность решения задач определяется количеством нейронов, связей и их активационными свойствами.
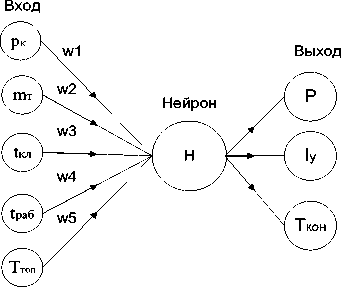
Рис. 1. Структура ИНС в СФД ракетных двигателей, где Н= pk ∙ w1+mт ∙ w2+ tкл ∙ w3+ tраб ∙ w4 +Ттоп ∙ w6; wi – весовой коэффициент связи; P, Iy, Tкон = f(Н)
-
Fig. 1. ANN structure in FDS rocket engines,
where H = p k ∙ w 1 + m f ∙ w 2 + t v ∙ w 3 + t w ∙ w 4 + Т f ∙ w 6 ; w i – coupling weight; P , I y , T frame = f ( Н )
Для решения задач прогнозирования с помощью ИНС применяют подход аппроксимации функции. В этом случае при обучении настраиваемые параметры нейросети принимают вид, соответствующий некоторой функции, описывающей временной ряд данных телеметрии. Следует отметить, что прогнозирование имеет смысл только тогда, когда предыдущее изменение диагностических признаков предопределяет будущее значение.
Процесс прогнозирования сводится к следующей последовательности этапов [25–27]:
-
- подготовка исходных данных телеметрии;
-
- обучение ИНС;
-
- проверка адекватности ИНС;
-
- описание ИНС с использованием алгебраических или логических функций с целью её дальнейшего использования.
Так же ИНС может использоваться как классификатор состояний ЖРДМТ (рис. 2). При решении задачи классификации ИНС разбивает множество входных сигналов телеметрии, определяет, к какому классу относится входной сигнал, и сигнализирует о новых состояниях, т. е. нейросеть может выявлять ранее неизвестные классы состояния диагностируемых систем, что очень важно для разработки новых стратегий дальнейшей эксплуатации ракетного двигателя. В этом случае ИНС вычисляет вероятность текущего состояния и относит состояние двигателя к одному из выделяемых стандартами классов. Обработав совокупность входящих данных, выходной нейрон выдаёт сигнал, соответствующий определенному классу технического состояния (нормальное, удовлетворительное, критическое).
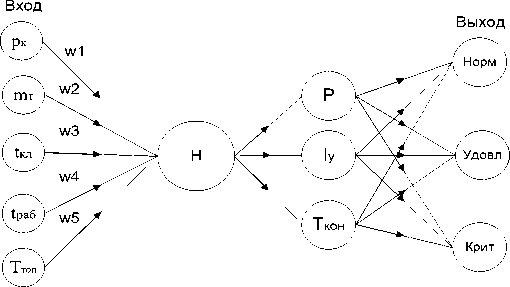
Рис. 2. Схема работы нейросети как классификатора вероятностных состояний ЖРДМТ
-
Fig. 2. Scheme of the neural network as a classifier of probabilistic states of a rocket engine
Таким образом, ИНС можно использовать как инструмент для расчета значения ДП в определенный промежуток времени и в качестве определителя текущего технического состояния ЖРДМТ.
Метод прогнозирования технического состояния ЖРДМТ на основе ИНС. Общая задача метода прогнозирования технического состояния ракетных двигателей с использованием ИНС в качестве аналитического блока СФД сводится к сравнению аппроксимированной функции текущего значения ДП с её эталонным значением в соответствующих эксплуатационных условиях. При этом решаются задачи экстраполяции временного ряда значений телеметрических данных на заданный промежуток времени и определения класса состояния двигателя (рис. 3).
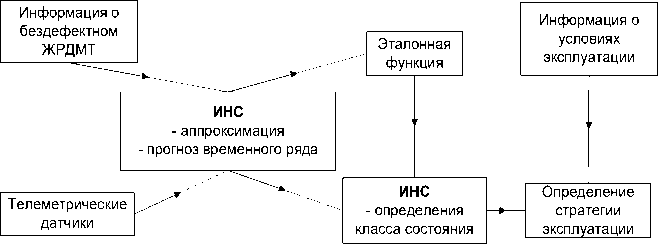
Рис. 3. Блок схема метода прогнозирования технического состояния ракетного двигателя
Fig. 3. Block diagram of a method for predicting the technical condition of a rocket engine
Предлагаемый метод состоит из следующих этапов:
-
– телеметрия функционирования ЖРДМТ;
-
– обучение ИНС на контрольном множестве данных;
-
– экстраполяция значения ДП на заданный промежуток времени в ИНС;
-
– определение класса текущего состояния в ИНС;
-
– формирование дальнейшей стратегии эксплуатации.
Заключение.
-
1. В случае тесной взаимосвязи телеметрических данных диагностических признаков, трудно определить степень их весомости при определении класса текущего технического состояния, а также провести прогнозирование дальнейшего развития процессов функционирования ЖРДМТ.
-
2. К наиболее информативным признакам нормального функционирования ЖРДМТ необходимо отнести массовый расход топлива, температура топлива, давление в камере сгорания, быстродействие клапанов и время работы двигателя. Выбранные признаки необходимы при регулировании тяги, удельного импульса и температуры конструктивных элементов.
-
3. Использование ИНС для прогнозирования технического состояния ЖРДМТ в условиях минимального количества информации, поступающей от датчиков СФД, даёт возможность с большой точностью проводить экстраполяцию временных рядов и определять текущее состояния системы. Но использование ИНС предполагает обучение и переобучение, что накладывает существенные ограничения на оперативность контроля ЖРДМТ в полёте.
-
4. Для проверки эффективности разработанного метода, в первую очередь, требуется разработать имитационную модель, способную генерировать поток дискретных данных, представляющих собой телеметрическую информацию о диагностических признаках ЖРДМТ, после провести обучение ИНС по прогнозированию и выделению классов
технического состояния. Завершающая стадия проверки должна проводиться с использованием реальных экспериментальных данных.
Список литературы Разработка и тестирование алгоритма обеспечения минимального угла отклонения главной центральной оси инерции в процессе балансировки летающей модели в одной плоскости коррекции
- Klyuchnikov A. V. [Development and improvement of the algorithm single-plane balancing in a dynamic mode of high-speed flying models]. Vestnik SibGAU. 2015. Vol. 16, No. 2, P. 411-416 (In Russ.).
- Klyuchnikov A. V. [Numerical algorithm for the optimization of process trim tapered flying models on dynamic balancing stand]. Vestnik SibGAU. 2016, Vol. 17, No. 2, P. 309-317 (In Russ.).
- Glazyrina L. M., Karpovitskiy M. S., Klyuchnikov A. V., Malgin A. I., Smirnov G. G., Fomin Yu. P. Balan-sirovochnyy stend s vertikalnoy osyu vrashcheniya [Balancing stand with vertical axis of gyration]. Patent RF, no. 2292533, 2007.
- Glazyrina L. M., Karpovitskiy M. S., Klyuchnikov A. V., Malgin A. I., Smirnov G. G., Fomin Yu. P. Sposob balansirovki rotora [Rotor's counterbalancing method]. Patent RF, no. 2292534, 2007.
- Dmitriyevskii A. A., Lysenko L. N., Bogodistov S. S. Vneshnyaya ballistika [External ballistics]. Moscow, Mashinostroenie Publ., 1991, 640 p.
- Pravdin V. M., Shanin A. P. Ballistics of uncontrollable flying machines [Ballistika neupravlyaemih letatelnih apparatov]. Snezhinsk, RFNC-VNIITF Publ., 1999, 496 p.
- Klyuchnikov A. V. [The algorithm of single-plain dynamic balancing process of a conical flying prototype with optimization by criteria of achieve the minimum deviation of main centroidal axis of inertia]. Materialy XXIII Mezhdunarodnoy nauchnoy konferentsii "Reshet-nevskie chteniia" [Proc. 23th Int. Technol. Conf. "Reshet-nev reading"]. Krasnoyarsk, 2019, Part 1, P. 30-32 (In Russ.).
- Ilinykh V. V., Klyuchnikov A. V., Mihailov E. F., Timoshchenko A. G. [Technological support of quality during the manufacture of hypersonic uncontrollable flying models]. Vestnik SibGAU. 2013, Vol. 49, No. 3, P. 191-196 (In Russ.).
- Klyuchnikov A. V. [Method of eliminate a technological rig on measurement results during dynamic counterbalancing of flying vehicle]. Materialy XIX Mezhdunarodnoy nauchnoy konferentsii "Reshetnevskie chteniia" [Proc. 19th Int. Technol. Conf. "Reshetnev reading"]. Krasnoyarsk, 2015, Part 1, P. 21-23 (In Russ.).
- Abyshev N. A., Klyuchnikov A. V., Mikhailov E. F., Chertkov M. S. [Stand for precise non-contactable counterbalancing in dynamic regimen of conical rotors]. Trudy XIX Mezhdunarodnogo simpoziuma "Nadyozhnost i kachestvo" [Proc. 19th Int. Technol. Symp. "Reliability & Quality"]. Penza, 2014, Vol. 2, P. 234-236 (In Russ.).
- Klyuchnikov A. V. [Test equipment for diagnostics of a mass symmetry distribution of compound rotor's detailes]. Trudy IX Mezhdunarodnoy nauchno-prakticheskoy konferentsii "Innovatsii na osnove infor-matsionnyh i kommunikatsionnyh tehnologiy" [Proc. 9th Int. Scientif. and Pract. Conf. "Innovations Based on Information and Communication Technologies"]. Moscow, 2012, Part 1, P. 21-23 (In Russ.).
- Klyuchnikov A. V. Sposob balansirovki rotora v odnoy ploskosti korrektsii [Method of rotor's counterbalancing in singular place for correction]. Patent RF, no. 2499985, 2013.
- Klyuchnikov A. V. [Precised mathematical model for valuing of mass-inertia asymmetry parameters of a lengthened rotor]. Trudy XVII Mezhdunarodnogo sim-poziuma "Nadyozhnost i kachestvo" [Proc. 17th Int. Technol. Symp. "Reliability & Quality"]. Penza, 2013, Vol. 1, P. 224-227 (In Russ.).
- Andreev S. V., Klyuchnikov A. V., Mihailov E. F. [Prospects of application of dynamic counterbalancing method for testing of flying machine's mass-inertia asymmetry parameters]. Materialy XVIII Mezhdunarod-noy nauchnoy konferentsii "Reshetnevskie chteniia" [Proc. 18th Int. Technol. Conf. "Reshetnev reading"]. Krasnoyarsk, 2014, Part 1, P. 8-10 (In Russ.).
- Klyuchnikov A. V. Sposob nastroiki balansiro-vochnogo stenda dlya opredeleniya parametrov masso-inertsionnoy asimmetrii rotorov [Method of adjusting a counterbalance machine for determination of rotors' mass-inertia parameters]. Patent RF, no. № 2453818, 2013.
- Klyuchnikov A. V. [Methodical ensuring a process of individual adjusting the dynamic balancing machine in the controlled object]. Trudy XIV Mezhdunarodnoy nauchno-prakticheskoy konferentsii "Innovatsii na osnove informatsionnyh i kommunikatsionnyh tehnologiy" [Proc. 14th Int. Scientif. and Pract. Conf. "Innovations Based on Information and Communication Technologies"]. Moscow, 2017, P. 382-386 (In Russ.).
- Andreev S. V., Klyuchnikov A. V., Lysykh A. V., Mikhailov E. F. [Calibrate operations during detail's module counterbalancing on a non-adjusted dynamic counterbalance machine]. Trudy XVIII Mezhdunarodnogo simpoziuma "Nadyozhnost i kachestvo" [Proc. 18th Int. Technol. Symp. "Reliability & Quality"]. Penza, 2013, Vol. 2, P. 129-131 (In Russ.).
- Klyuchnikov A. V. Sposob balansirovki rotora v odnoy ploskosti korrektsii [Method of rotor's counterbalancing in singular place for correction]. Patent RF, no. 2694142, 2019.
