Разработка конструкции и анализ стабильности посадочных мест высокой точности установки МКА "Аист-2Д"

Автор: Шапошников Сергей Николаевич, Космодемьянский Евгений Владимирович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 1-1 т.19, 2017 года.
Бесплатный доступ
Приведены сведения о создании конструкции малого космического аппарата дистанционного зондирования Земли. Представлены результаты разработки конструкторской документации, вибродинамических испытаний, подтверждающих стабильность конструкции малого космического аппарата. Рассмотрен и проанализирован опыт проведения измерения фактического положения посадочных мест высокой точности установки. Сформулированы рекомендации по дальнейшему развитию данной технологии.
Малый космический аппарат, информационные технологии, стабильность конструкции, вибродинамические испытания, средства измерений
Короткий адрес: https://sciup.org/148205001
IDR: 148205001 | УДК: 629.78
Design engineering and stability analysis of high precision mounting seats for small spacecraft “Aist-2D”
Information on creation of a design of the small spacecraft of remote sensing of Earth are provided. Results of development of design documentation, the vibrodynamic tests confirming construction consistency of the small spacecraft are presented. Experience of measuring of high precision mounting seats actual position is considered and analysed. Recommendations about further development of this technology are formulated.
Текст научной статьи Разработка конструкции и анализ стабильности посадочных мест высокой точности установки МКА "Аист-2Д"
Рис. 1. Общий вид МКА «Аист-2Д»
гии доводочных работ на этапе окончательной сборки КА и высокой квалификации исполнителей. Всё это является причиной увеличения сроков изготовления и окончательной стоимости КА[3].
При разработке проектно-конструкторского облика МКА «Аист-2Д» для устранения этих недостатков было принято решение отказаться от проведения юстировочных работ и использовать технологию по проведению замера фак- тического углового положения посадочных мест под приборы высокой точности установки при помощи лазерного трекера. В результате этого, требования по точности углового положения посадочных мест под приборы системы управления движением и чувствительные элементы на МКА составили порядка 1-2º при обеспечении механической стабильности 2-3 угловых минуты. Такую точность углового положения посадочных мест стало возможным обеспечить конструктивно, без использования регулиро- вочных работ. Погрешность измерений фактического положения посадочных мест, исходя из требований на систему управления движением, не должна была превышать 45 угловых секунды [4]. Для подтверждения механической стабильности фактическое угловое положение посадочных мест контролировалось до и после виброди-намических испытаний.
В соответствии с поставленной задачей, вместо задания значений углов и их отклонений для выполнения их с помощью юстировочных работ были заданы требования по фактическому замеру положения посадочных мест под приборы с заданной погрешностью. Для минимизации сроков разработки МКА конструкторская документация была выполнена полностью в электронном трехмерном виде с применением технологии нисходящего проектирования.
Широкое применение новых технологий управления проектами и высокоуровневых информационных технологий на МКА «Аист-2Д» обеспечило высокую эффективность процесса разработки технической документации, а так же дало возможность применения перспективных конструкторских и технологических решений [5]. Фрагменты конструкторской документации в виде аннотированных трехмерных моделей с комбинированными видами приведены на рис. 2, где М, М1, М2, – посадочные места для проведения замеров относительно базы Ю.
Задача проведения измерений состояла в определении фактических угловых отклонений посадочных мест под приборы высокой точности установки относительно баз, указанных в конструкторской документации. В качестве объекта измерений выступали посадочные места под приборы высокой точности установки, расположенные на кронштейнах МКА «Аист-2Д».
Исходное состояние изделия:
-
- бортовая аппаратура не устанавливается;
-
- сотопанели установлены на корпусной раме изделия кроме II – IV плоскостей;
-
- кронштейны установлены на сотопанели и раму изделия согласно требованииям КД.
Общий вид объекта измерений приведён на рис. 3.
Технология замера фактического углового положения посадочных мест под приборы высокой точности установки заключалась в следующем: с помощью лазерного трекера производился замер фактического положения площадок под приборы и их фиксирующих элементов (штифтов или направляющих шпилек), при этом использовался интерфейс самого лазерного трекера (сферические отражатели) и фиксаторы (адаптеры).
При выполнении контроля посадочных мест под приборы изделия «Аист-2Д» применялись следующие средства измерений:
-
- лазерный трекер;
-
- уголковые отражатели в сферической обечайке 0,5 и 1,0 дюйма;
-
- адаптеры под сферический отражатель 0,5 и 1,0 дюйма;
-
- программное обеспечение для проверки, калибровки и работы с лазерным трекером.
Принцип действия координатно-измерительной системы лазерного трекера заключается в следующем. Координатно-измерительная система измеряет горизонтальный и вертикальный углы относительно своего положения в пространстве, а также дистанцию до отражателя. На рис. 4 представлена принципиальная
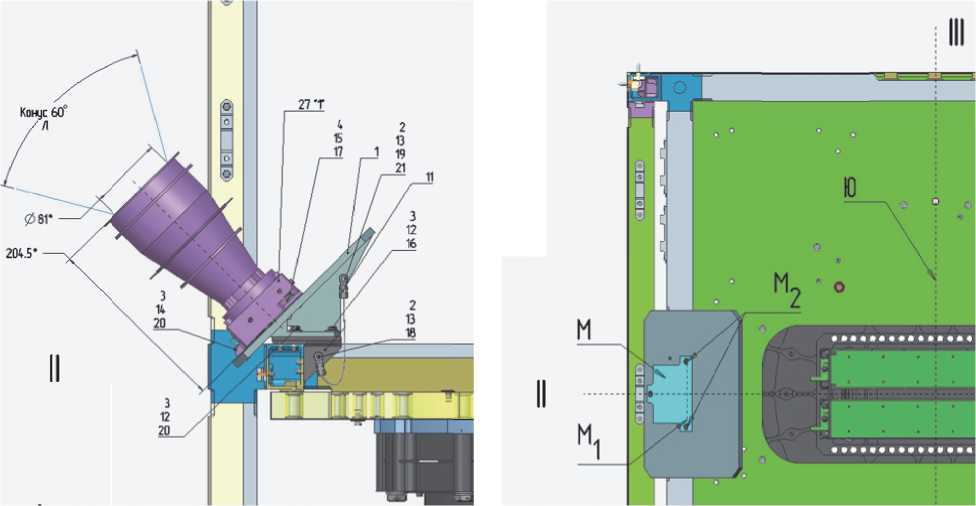
Рис. 2. Фрагменты конструкторской документации
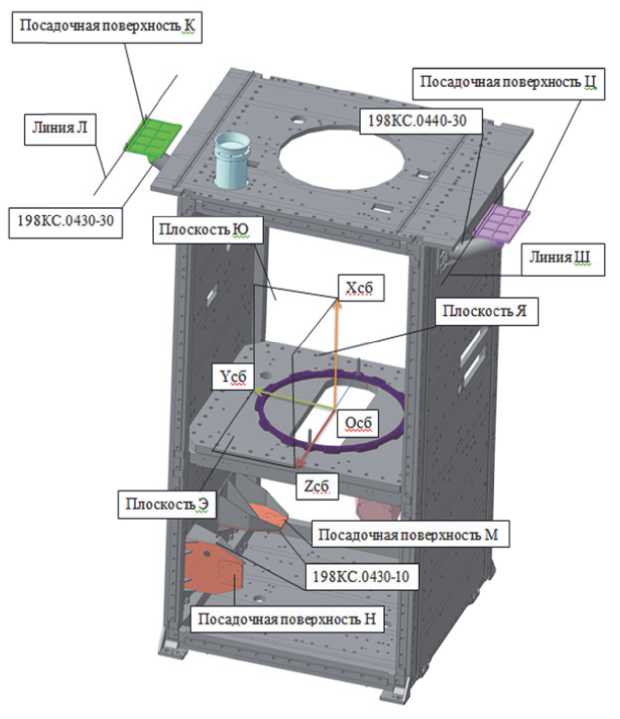
Рис. 3. Общий вид объекта измерений
схема определения координат отражателя (Xo, Yo, Zo) по результатам замеров горизонтального (Hz) и вертикального (V) углов и расстояния (D) с помощью лазерного трекера. В данном случае определялись координаты отражателя в системе координат лазерного трекера. Измерения выполняются на три и более контрольные точки объекта с известными координатами. Все остальные измерения могут быть автоматически пересчитаны уже в системе координат объекта. В данных измерениях использовался метод последовательного прикладывания отражателя к измеряемым поверхностям изделия и фиксирование его координат [6].
Проведение измерений посадочных мест приборов включало в себя следующие операции:
-
- сборка и соединение всех компонентов комплекта лазерного трекера. Головка лазерного трекера устанавливалась на штатном штативе, настроенном на минимальную высоту.
-
- запуск программного обеспечения трекера.
-
- установка объекта измерений с обеспечением стабильности положения.
-
- установка рядом с объектом измерений металлической колонны со специальной горизонтальной площадкой для размещения головки лазерного трекера.
Схема положений объекта измерений и из- мерительного прибора представлена на рис. 5.
Оценка погрешности измерений производилась следующим образом. Предел суммарной погрешности контроля посадочных мест приборов изделия «Аис т-2Д» определялся по формуле:
-
△ — ztV^ cn + △ осн + △ зам ,
где Δ СИ – погрешность средства измерения;
Δ ОСН – погрешность, вносимая средствами оснащения;
Δ зам– погрешность метода замера.
Погрешность средства измерения ( Δ СИ) указана в паспорте на лазерный трекер и составляет:
-
- предельная погрешность измерения углов: не более 0.7 угловой секунды;
-
- предельная погрешность измерения дистанции в режиме абсолютного дальномера: не более 10 мкм;
-
- предельная погрешность центрирования призмы отражателя относительно сферы 3.0 мкм.
Таким образом, погрешность измерений посадочных мест высокой точности установки составила не более 45 угловых секунд по каждому направлению измерения.
О механической стабильности конструкции можно судить по результатам положения измеряемых площадок после вибродинамических
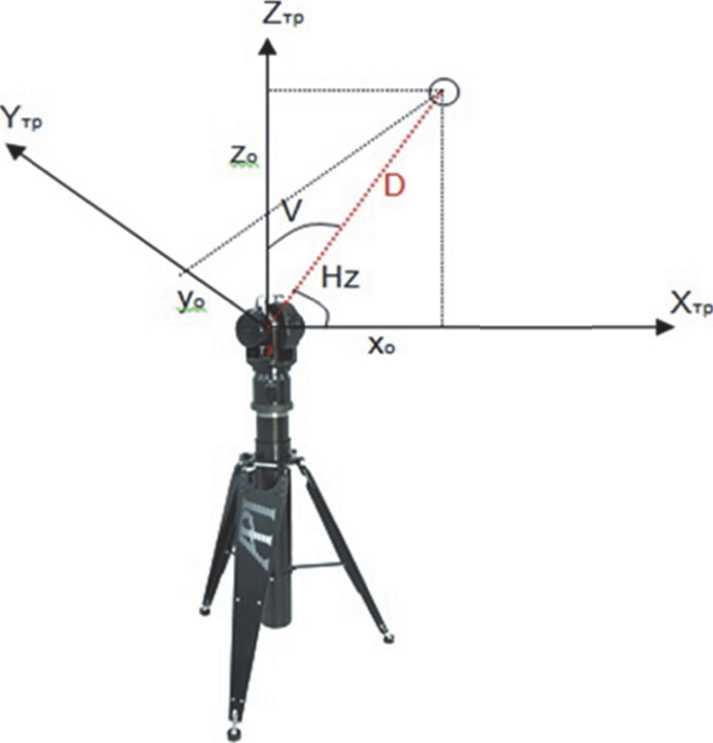
Рис. 4. Принципиальная схема определения координат отражателя в пространстве
испытаний. В связи с этим измерение фактического положения посадочных мест высокой точности установки проводилось повторно после проведения испытаний. Результаты и погрешность измерений приведены в табл. 1.
Результаты замеров подтвердили стабильность положения площадок в диапазоне 2-3 угловых минуты по каждому направлению измерений.
ВЫВОДЫ
При разработке МКА «Аист-2Д» широко использовались новые технологии управления проектами и высокоуровневые информационные технологии.
Применялись перспективные конструкторские и технологические решения:
-
- создание изделия по методу нисходящего проектирования;
-
- выполнение конструкторской документации в трёхмерном виде;
-
- реализация требований на проведение измерений в конструкторской документации;
-
- измерение фактического положения посадочных мест высокой точности установки.
Благодаря этому удалось достичь:
-
- ускорения проектно-конструкторских работ;
-
- улучшения целевых показателей МКА;
-
- повышения качества проектной и конструкторской документации;
-
- эффективной организации управления данными и проведением изменений.
В результате применения технологии замера фактического углового положения посадочных мест высокой точности установки при помощи лазерного трекера на изделии «Аист-2Д» получено следующее:
-
- технология обеспечила заданную техническим заданием погрешность измерений;
-
- получен положительный результат возможности проведения замеров;
-
- отсутствует необходимость изготовления сложной технологической оснастки;
-
- нет необходимости в проведении юстировочных работ;
-
- механическая стабильность конструкции подтверждена измерениями до и после вибро-динамических испытаний;
-
- сокращены цикл производства МКА и затраты.
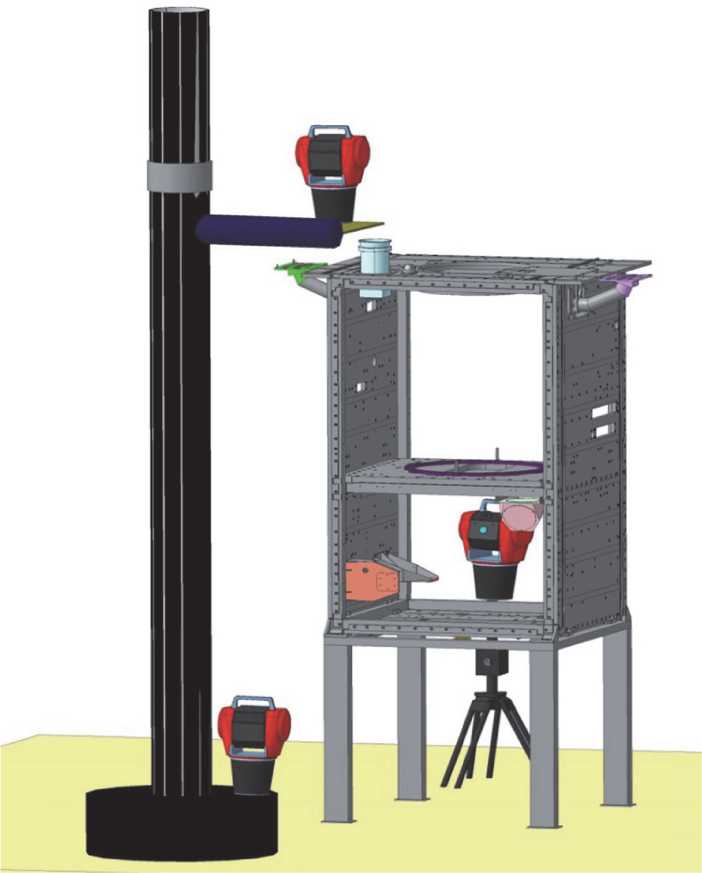
Рис. 5. Схема положения объекта измерений и лазерного трекера
Таблица 1. Результаты и погрешность измерений
|
Прибор |
Параметры измеряемых величин углов |
Значение угла |
Измеренное значение до испыт, град.мин. сек. |
Измеренное значение после испыт, град.мин. сек. |
Погрешность до испытаний, сек. |
Погрешность после испытаний, сек. |
|
Звездный датчик |
Угол между посадочной поверхностью М и плоскостью Э в проекции на плоскость Я. |
45 |
44°57 ' 24" |
44°57 ' 28 " |
11,2 |
12,3 |
|
Угол между линией М1 и плоскостью Ю в проекции на плоскость Э. |
0 |
- 0°15 ' 31" |
-0° 13 ' 34 " |
11,5 |
12,1 |
|
|
Угол между линией М1 и плоскостью Э в проекции на плоскость Ю. |
0 |
+ 0°2 ' 30" |
+0°00 ' 46 " |
12,9 |
11,8 |
Рассмотренный способ измерения фактического положения посадочных мест показал свою эффективность в проекте МКА «Аист-2Д», носит универсальный характер и может быть применен при разработке перспективных КА. Для его внедрения необходимо на этапе разработки конструктивно-компоновочной схемы аппарата учитывать особенности применения данного способа проведения замеров. Результаты измерений могут храниться в виде электронной модели разрабатываемого изделия, перерабатываться и использоваться уже при лётных испытаниях КА. Это в свою очередь позволяет корректировать работу системы СУД, повышая ее точность, что в сочетании с электронной КД и современными методами контроля повышает надежность и качество разрабатываемой космической техники.
Список литературы Разработка конструкции и анализ стабильности посадочных мест высокой точности установки МКА "Аист-2Д"
- Козлов Д.И. Конструирование автоматических космических аппаратов. М.: Машиностроение, 1996. 448 с.
- Методы обеспечения живучести низкоорбитальных автоматических КА зондирования Земли: математические модели, компьютерные технологии/А.Н. Кирилин, Р.Н. Ахметов, А.В. Соллогуб, В.П. Макаров. М.: Машиностроение, 2010. 384 с.
- Кирилин А.Н., Ахметов Р.Н. Ракеты-носители и космические аппараты ГНП РКЦ «ЦСКБ-Прогресс»//Общероссийский научно-технический журнал «Полет». 2007. № 8. С. 45-52.
- Дёмкин В.Н., Привалов В.Е. Лазерные технологии при измерении геометрии поверхности сложной формы (обзор)//Вестн. СПбО АИН. Вып. 5. СПб.: СПбГПУ, 2008. С. 138 -187.
- Космодемьянский Е.В. Особенности процесса создания трехмерной модели конструкции космического аппарата дистанционного зондирования//Известия Самарского научного центра РАН. 2011. № 1. С. 312-317.
