Разработка математических моделей системы «технологическое оборудование - груз» поворотного лесопогрузчика в режиме подтягивания груза

Автор: Полетайкин В.Ф., Гончаров И.А.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Математика
Статья в выпуске: 1, 2014 года.
Бесплатный доступ
Статья посвящена разработке математических моделей системы “технологическое оборудование - груз” телескопического манипулятора поворотного лесопогрузчика в режиме подтягивания груза.
Лесопогрузчики поворотные, манипулятор, математические модели
Короткий адрес: https://sciup.org/14083331
IDR: 14083331 | УДК: 630.377.4
Mathematical model development of “technological equipment-freight” system of the rotary logger in the freight pulling up mode
The article is devoted to the mathematical model development of "technological equipment - freight" system of the rotary logger telescopic manipulator in the freight pulling up mode.
Текст научной статьи Разработка математических моделей системы «технологическое оборудование - груз» поворотного лесопогрузчика в режиме подтягивания груза
Расчетная схема системы “технологическое оборудование – груз” представлена на рисунке. Рассматриваемый режим может иметь место при работе манипулятора в качестве технологического оборудования лесопогрузчиков, валочно-трелевочных машин, машин для бесчокерной трелевки деревьев и других лесосечных и лесотранспортных машин.
После захвата груза рабочим органом он подтягивается к машине перемещением подвижных секций телескопической стрелы при помощи механизма выдвижения секций (МВС) и поворотом колонны относительно оси О. При этом стрела совершает сложное движение: секции стрелы совершают поступательное движение относительно оси Х и одновременно стрела совершает поворот относительно оси К и оси О. Полости гидроцилиндра подъема стрелы находятся в плавающем положении, что обеспечивает свободное перемещение груза по поверхности пути.
Данный режим позволяет сократить время цикла и повысить производительность поворотного лесопогрузчика. Однако следует учитывать, что при этом возникают динамические нагрузки, которые необходимо учитывать при проектировании.
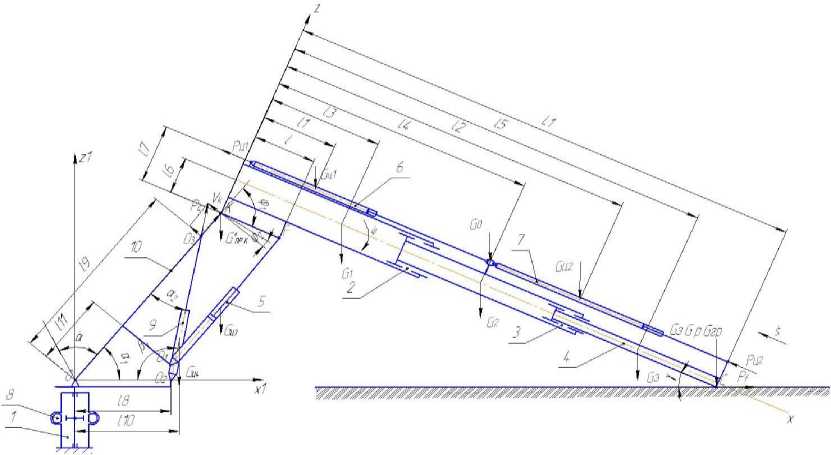
Расчетная схема системы “технологическое оборудование – груз” (манипулятор с отклоняющейся колонной); 1 – опорно-поворотное устройство; 2, 3, 4 – наружная, средняя, внутренняя секции телескопической стрелы; 5 – гидроцилиндр подъёма стрелы; 6, 7 – гидроцилиндры МВС; 8 – механизм поворота манипулятора в горизонтальной плоскости; 9 – гидроцилиндр поворота колонны; 10 – колонна
На рисунке приняты следующие обозначения: G 1 , G 2 , G 3 – силы тяжести наружной, средней и внутренней секций стрелы; G З , G гр , G р – силы тяжести захвата, груза и ротатора, приведенные в точку С – точку подвеса ротатора к стреле; G 0 – силы тяжести механизма изменения вылета, приведенные к центру массы средней секции; G Ц1 , G Ц2 – силы тяжести гидроцилиндров выдвижения секций стрелы. Принимаем G Ц1 = G Ц2 ; G Ц3 , G Ц4 – силы тяжести гидроцилиндров подъема стрелы и поворота колонны; G ПР.К – суммарная сила тяжести элементов конструкции колонны, приведенная к точке K; P С – усилие на штоке гидроцилиндра поворота колонны; P Ц1 , P Ц2 – усилия на штоках гидроцилиндров механизма изменения вылета, P Ц1 = P Ц2 ; P f – сила сопротивления перемещению дерева; L 1 – размер стрелы при выдвинутых секциях; l 1 , l 2 , l 3 , l 4 , l 5 – расстояния от оси вращения стрелы К до центров тяжести элементов конструкции; l, l 6 , l 7 , l 8 , l 9 , l 10 , l 11 – размеры элементов конструкции манипулятора; а - угол поворота колонны в плоскости Z 1 OX 1 ; а - угловая скорость вращения колонны; S - ход телескопического устройства стрелы; S - скорость поступательного движения секций; ф -угол поворота стрелы в плоскости ZKX; р - угловая скорость вращения стрелы; V k - скорость перемещения колонны; γ и γ 1 – вспомогательные углы.
Стрела совершает вращение с одновременным втягиванием секций в плоскости ZKX, колонна вращается в плоскости Z 1 OX 1 . Углы поворота α и φ, а также величина перемещения секций S, однозначно определяют положения данных элементов системы в плоскостях вращения. Исходя из этого, данную систему можно рассматривать как систему с тремя степенями свободы (K=3) с обобщенными координатами α,S и φ.
Для составления уравнений движения данной механической системы воспользуемся уравнениями Лагранжа 2-го рода. В соответствии с числом степеней свободы системы записываем три уравнения Лагранжа:
d( ∂ T) -∂ T = Q ; d( ∂ T ) -∂ T = Q ; d( ∂ T ) -∂ T = Q α S ϕ
dt да да dt дS дS dt др др
где T – кинетическая энергия системы; Q α – обобщенная сила, соответствующая обобщенной координате α; Q s – обобщенная сила, соответствующая обобщенной координате S; Q φ – обобщенная сила, соответствующая обобщенной координате φ.
Кинетическая энергия рассматриваемой системы равна сумме кинетических энергий колонны, стрелы и груза:
T = T K + Т ГР + T C ,
где T K – кинетическая энергия приведенной к точке К массы колонны и элементов конструкции, смонтированных на ней (гидроцилиндров поворота колонны и подъема стрелы и других частей гидропривода); T ГР – кинетическая энергия груза, захвата и ротатора; T C – кинетическая энергия массы стрелы.
Кинетическая энергия колонны равна:
T = I O ® = т ПР. К L K a
.
K22
Получено выражение приведенной к точке К массы колонны и элементов конструкции:
l2
.
тПР к = 0,25 тк + 0,125 тц 3 • + 0,125 тц 4 • 4
. Ц L2K Ц
Подставив (4) в (3), получим выражение для определения кинетической энергии колонны:
(0,25 mK + 0,125 m,r, • + 0,125 m,r 4 • 4) Lid2
K Ц3 2 Ц4 2
=_________________ LK ___________ L K _____
.
K 2
Так как захват, ротатор и груз перемещаются по поверхности погрузочной площадки, их кинетическая энергия равна:
т _ (m p + m + mrpWk
ГР 2 , где VГС – скорость горизонтального перемещения масс mр, mз, mгр по поверхности погрузочной площадки.
Скорость V ГС величина переменная, напрямую зависящая от значения угла φ. Она определяется по следующим выражениям:
При у > 90 ° и / 2 = у - 90 ° V rc = Vk cos( y + y 2 ) + Scos у .
Скорость перемещения колонны V K определяется из выражения:
Vk =a Lk .(8)
Таким образом, кинетическая энергия груза, захвата и ротатора для данного случая будет определяться из выражения:
T _ ( m p + тз + тгр )( a L K cos( Y + Y 2 ) + S cos Y ) 2
Trpi = 2 .
При ф<90° и y2 = 90°-ф Vrc = Vkcos(Y2 — Y) + ScosY•(10)
Для данного случая кинетическая энергия равна:
T _ ( m P + m 3 + m rp )( a L K cos( Y - у ) + S cos у )
Т ГР2 = , . (11)
Элементы конструкции стрелы движутся с постоянной скоростью V C , которая определяется из выражения:
Vci = V2 + S 2 + 2VK:S cos y2 = у/ ос 2 L2K + S 2 + 2 a SLK cos у2
Кинетическая энергия системы в конце первого этапа определяется следующим выражением:
Т 1 = |{< P 2[( m 3 r 5 2 + m
^2 r 2 + mr 2 + mr 2 + m^r 2 + m^2) + ( m 3 (- r5S + 0,25 S 2) +
+ m4 2(-0,5 r2S + 0,0625 S 2)] + [ a2 L ^( m 3 + 0,5 m ^ 2 + m 2 + m 0 + mv j + m ) + S 2( m 3 + 0,5 m ^ 2) +
+ 2 aLKS cos у 2 ( m 3 + 0,5 m ^2)] + [( a 2 L2K cos2 ( у + у 2))( mP + m3 + mrP) +
+ (2 aLK cos(у + у 2) S cos у )( mp + m3 + mrp) + ( S 2 cos2 у )( mp + m3 + mr p)] + [ mnpKL2Ka 2 ]}.
Кинетическая энергия системы в конце второго этапа определяется по выражению:
Т
2
=
~{ 2[(m1 гз + mЦ 1 Г2 + m2r42+ mоr42+ m3rs + mЦ2r22) + (mЦ 1(—0,5r1 S + 0,0625S2) + + m2 (—r4S + 0,25 S2) + m0(-r4S + 0,25 S2) + m3 (-2 r5S + S2) + mЦ 2 (-1,5 r2S + 0,5625S2)] + + [a2L!(m, + m9 + m, + 0,5 mTT, + mrr 9 + mn ) + S2(m-, + m. + 0,5 mTT, + mrr 9 + mn ) + L KV 1 2 3 , Ц 1 Ц 2 0/ V 2 3 , Ц 1 Ц 2 0/ + 2a LKS cos у2(m2+ m3+ 0,5mЦ 1 + mЦ2+ m0)] + [(a2LK cos2(у2— у))(mp + m3 + mrP) + + (2a LK cos(у2— у) Si cos у)(mp + m3 + mrp ) + (S2cos2у)(m р + m3+ тгр )] + [тПР.К L2Ka2]} Для получения уравнений движения системы на первом и втором этапах производим дифференцирование выражений (13) и (14) по составляющим уравнений Лагранжа. Далее подставляем результаты дифференцирования кинетической энергии в левые части уравнений Лагранжа (1). Так как гидроцилиндры подъема стрелы находятся в плавающем положении, то сила тяжести стрелы в любой момент времени распределяется между точками K и C. Составляющие силы тяжести стрелы: GK – часть силы тяжести стрелы, передающаяся на колонну; GC – часть силы тяжести стрелы, передающаяся на захват, ротатор и груз. Точка приложения равнодействующей сил тяжести частей стрелы может быть определена из выражения, составленного на основании теоремы Вариньона: £ Gili = GcLc ,(15) где Gi – силы тяжести составных частей стрелы; l – координаты центров тяжести частей Gi относительно точки К; Gc - сила тяжести стрелы, равная сумме сил тяжести составных частей; Lc - координата центра тяжести стрелы относительно точки К. LC = ^’l ■(16) GC Значение GC определим из уравнения равновесия стрелы относительно точки К: ^Мк = 0 ; — GCLC — GCL = 0 ; GC = GCLC ■(17) “L Значение GK = Gc- GC. Значения GC и GK величины переменные, зависящие от размеров L1 и L', поэтому при моделировании режима движения стрелы с грузом их необходимо определять на каждом шаге варьирования факторов. Сила сопротивления перемещению дерева, сил тяжести стрелы, захвата и ротатора: Pf = (Gд + G3 + Grp + GCC) f. На первом этапе движения стрелы обобщенная сила Q равна сумме проекций всех сил, совершающих работу в направлении обобщенной координаты S, то есть Qsх= УFsх. Составляющая силы сопротивления Pf на первом этапе движения Pf1 на направление координаты S: Pf 1S = Pf 1 cos y = (Gд + G3 + Grp + GC ). f cos y. Отсюда обобщенная сила, соответствующая обобщенной координате S для первого этапа 0 ≤ ΔS ≤ 0,5S, будет равна: Qs 1 = У Psi = Рц 2 - [(0,5Gц 2 + G3 + Gp + G3 + Grp) • sin Y + Pf 1 ’ cos %]. Обобщенная сила Q в конце первого этапа движения равна сумме моментов всех сил относительно точки К, совершающих работу в данном направлении: Q,1 = у MK = [-Gц2(12 -0,25S) - Gз(15 -0,5S) - (Gp + G3 + Grp)(L1- 0,5S) -- Go14- G214- G^ l, - G, l3 ]cosy - Pf sin y(L, - 0,5S) - (Gy, + Go + Gy2)l7 sin y + + (G, + G2+ G3+ Gp + G3 + Grp)16 sin y - Pf cosyl6. Обобщенная сила Q равна сумме моментов всех сил, совершающих работу относительно оси вращения колонны: Qa1 = У MO = PC sin a2 19 [(GC+ Gnp. К ) LKcos a1 + Pfcos y (LK+ 16)]. По аналогии получены обобщенные силы для второго этапа движения стрелы: Qs2 = У Psi = Рц 1 - [(Gц2 + 0,5G^ 1 + G3 + G2 + G0 + Gp + G3 + Grp) • sin y + Pf 2 • cos y]. Qv2 = У Mk = [-Gц2( 12 - 0,75S) - Gз( 15 - S) - (Gp + G3 + G^)(L1 - S) - G0( 14 - 0,5S) - G2 ( 14 - 0,5S) - Gy1 (1, - 0,25S) - G13 ]cos y - Pf sin y(L, - S) - (вц, + Go + Gy2) 1, sin y + + (Gt + G2 + G3 + Gp + G3 + Gr)116 sin y - Pf cos y16. Qa2 =У MO = PC sin «2 19 - [(GC+G^p.К )LK cos «1 + Pf cos у(LK+ 16)]’ Подставив выражения обобщенных сил Qsj , Qs2, Q^x , Q2, Qa , Qa2 в правые части уравнений Лагранжа (1), получим полные уравнения движения системы “рабочее оборудование – груз” для первого и второго этапов 0 ≤ ΔS ≤ 0,5S и 0,5S ≤ ΔS ≤ S. Математическая модель движения системы “рабочее оборудование-груз” для первого этапа движения (0 ≤ ΔS ≤ 0,5S) имеет следующий вид: |5(m3+ 0,5m^2) + a(m3LK cos y + 0,5mu^Lp cos Y) - — a(m^L^ sin y • Y + 0,5mrr-,L^ sin Y • Y) + 3 K 2 2 Ц2 K 2 2 + a(impLK cos(Y + Y ) cos Y + m.3Lk cosY + Y ) cos Y + m.rL^k cos(Y + Y ) cos Y) — — a(mpLKsin(y + Y2)(Y+Y2)' cosY+ m3LKsin(Y + Y2)(Y + Y2)' cosY+ + mrpLk sin(y + Y2)(Y + Y2)' cosY)— a(mpLk cos(y + Y2)sin Y' Y+ + im3LK cos(Y + Y ) sin Y' Y + imrL^K cos(Y + Y ) sin Y' Y) + + S(mr cos2y + m3 cos2Y + mpp cos2Y) — — 2S(mr cos y sin Y ' Y + m3 cos y sin Y ' Y + mpp cos y sin Y ' Y)] — — [m (m3(—r + 0,5S) + m,,2(—0,5r + 0,125S))] = = РЦ2 — [(0,5GЦ2 + G3 + GP + G3 + GrP) ' sin Y + Pf 1 ' cos y] , ф[ m3 (r52— r5S + 0,25 S2) + m0 2(r22—0,5 r2S + 0,0625 S2) + + m2r2 + mor2 + myr2+ m^2] + m[m3 (r5S + 0,25 • 2S ' S) + + m02(0,5r2S + 0,0625 • 2S • S)] = [—Go(ll2 — 0,25S) — G3(l5 — 0,5S) — — (Gd + Gq + G^d) (Li — 0,5S) — G0 14 — G2 14 — Gq 111 — G113 ] cos y — — Pf sin y(Lr — 0,5S) — (Goi + Go + Go)ll, sin y + + (Gi + G2 + G3 + GB + Ge + Ga-)ll6 sin y — Pf cos y16 [a( L 2 m3 + L 20,5 mL!2 + L 2 m2 + L 2K m^ + L 2 mp 1 + L 2 mi) + + S(m3LK cos y2+ 0,5mЦ2LK cosy2) — S(m3LK sin y2Y2 + 0,5mЦ2LK sin y2Y2) + + d(m Р L2Kcos2(Y + Y2) + m3L2Kcos2(Y + Y2) + mrPL2Kcos2(Y + Y2)) - — 2d (m p L2KCos(Y+Y 2)sin( Y+Y 2)(Y+Y 2)' + +m 3L2Kcos(Y+Y 2)sin(Y+Y 2)(Y+Y 2)' + +m rpL2Kcos(Y+Y 2 )sin(Y+Y 2)(Y+Y 2)') + + S(mpLKcos(Y + Y2)cosy + m3LKcos(Y + Y )cosY + mrPLKcos(Y + Y )cosY) — — S(mp LKsin( y + Y2)(Y + Y2)'cosY + m3 LKsin( y + Y2)(Y + Y2)'cosY + +mГрLKsin(y+Y2)(Y+Y2) cosY) — — S(mpLKcos(Y + Y2 )sin yY + m3LKcosY + Y2 )sin yY + mrPLKcos(Y + Y )sin YY) + + dmrlp„L2 ] = P sin a, l„ — [(GK + G Кр „) L„ cos a + Pf cos y (L„ +1,)]. ПР.К K C 2 9 C ПР.К K 1 f K 6 Математическая модель движения системы “рабочее оборудование – груз” для второго этапа движения (0,5S ≤ ΔS ≤ S) имеет следующий вид: [S(m2 + m3 + 0,5mL(3 + my2 + m0) + a(m2LK cos y + m3LK cos y + + 0,5myXLK cos y + my2LK cosy + m0LK cosy) — a(m2LK sin y ' Y2 + + m3LK sin y ' Y2 + 0,5myLK sin y ' Y2 + my2LK sin y ' Y2 + m0LK sin y ' Y2 ) + + a(mpLK cos(Y — Y)cosy + m3LK cos(Y — Y)cosy + mrpLK cos(Y — Y)cosy) — — a(mpLK sin( y — Y)(Y — Y)' cosy + m3LK sin(y — Y)(Y — Y)' cosy + + mPPLK sin(y — Y)(Y — Y)' cos Y) — a(mpLK cos(Y — Y)sin Y ' Y' + + m3LK cos(Y — Y)sin Y ' Y + mPPLK cos(Y — Y)sin Y ' Y ) + + S (mp cos2 y + m3 cos2 y + mPp cos2 y) — 2S(mp cosysin y • y' + m3 cos ysin y • Y' + m2 + mPP cosysm y • Y )] — [^{my3(—0,5r + 0,125S) + m2(—r + 0,5S) + + m0 (—r + 0,5 S) + m3 (—2 r + 2 S) + my2(—1,5 r2 +1,125 S)}] = = Pyj — [(Gy2 + 0,5Gyj + G3 + G2 + Go + GP + G3 + GrP) • sin y + Pf 2 • cos y] ^[mr2+ m0((r2-0,5^S + 0,0625S2) + m2(r42-r4S + 0,25S2) + + m0 (r42- r4S + 0,25S2) + m3 (r52- 2r5S + S2) + + m02 (r22-1,5r2S + 0,5625S2)] + 0, +m2 (r4S + 0,25 • 2S • S) + m0 (r4S + 0,25 • 2S • S) + + m3(2r5S + 2S • S) + m02 (1,5r2S + 0,5625 • 2S • S)] = = [-Go2 (12 - 0,75S) - Gз( 15 - S) - (GB + Gq + GAb) (L - S) - - Go(l4-0,5S) - G2 (l4- 0,5S) - GB(lЦ - 0,25S) - G l3]cosу - + (Gt + G2 + G3 + GB + GQ + GaJl6 sin y - Pf cos yl6 [a(L2m, + L2m2 + LIm3 + Lt0,5m + L2mrr2 + L2,mn) + S(mL cosy + m3Lp cosy + K 1 K 2 K 3 K Ц1 K Ц2 K 0 2 K 2 3 K 2 + 0,5mUtLK cos y2 + mU2LK cos y2 + m0LK cos y2) - S(m2LK sin y2 • y2 + +m3LK sin y2 • Y2 +0,5m4LK sin у • y2 + mIf2LK sin у • y2 + m0LK sin у • Y2) + + d(mPL2 cos2(y2 - у) + m3L2 cos2(y2 - у) + mrpL2K cos2(y2 - у)) - -2d(mpLK cos(Y2 -y)sin(y2 -Y)(Y2 -Y)' + m3LK cos(Y2 -Y)sin(Y2 -Y)(Y2 -Y)' + + mrpLK cos(Y2 -Y)sin(Y2 -Y)(Y2 -Y)')+ S(mPLKcos(Y2 - Y)cosY+ +m3Lkcos(y2 - Y)cosy + mrpLkcos(y2 - Y)cosy) - S(mPLK sin(y2- Y)(Y2- Y) cos y + +m3LKsin(y2 -Y)(Y2 -Y)'cosY+mrpLKsin(Y2 -Y)(Y2 -Y)'cosY)- -S(mPLKcos(y - Y)sin Y• Y + m3LKcos(y - Y)sin Y• Y + = Pr sin a2 L - [(GK + GКР )LLp cos a, + Pf cos y (Lp + L)]. C 2 9 C ПР.К K 1 f K 6 Заключение. В результате проделанной работы получены математические модели движения системы “технологическое оборудование – груз” поворотного лесопогрузчика в режиме подтягивания груза, позволяющие исследовать влияние на уровень динамических нагрузок на элементы конструкции конструктивных и эксплуатационных факторов (скорость поступательного движения секций, угловая скорость вращения стрелы, угловая скорость вращения колонны и т.д.).
