Разработка методики бездатчикого определения углового положения ротора синхронного двигателя на основании дополнительного сигнала высокой частоты

Автор: Лицин Константин Владимирович, Ковальчук Татьяна Владимировна
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 3 т.19, 2019 года.
Бесплатный доступ
Рассматривается возможность реализации метода бездатчикового определения углового положения ротора. Проанализированы существующие методы бездатчикового контроля углового положения ротора двигателей переменного тока. Представлены общие недостатки ряда бездатчиковых методов. Указано, что одна из главных проблем определения углового положения ротора без использования механического датчика заключается в сложности определения данной величины при нулевой и низкой скорости. Представлена функциональная схема бездатчикового электропривода на основе синхронного двигателя. Рассмотрена взаимосвязь наводимых ЭДС и высокочастотного сигнала напряжения, подаваемого в обмотку возбуждения синхронного двигателя. Осуществлен вывод формулы, описывающей зависимость между угловым положением ротора и фазными ЭДС. Вывод формулы осуществлен на основе системы уравнений Парка - Горева. Реализована структурная схема согласно приведенным зависимостям. Выполнен анализ полученных результатов.
Синхронный двигатель, высокочастотный сигнал, угловое положение ротора, наблюдатель состояния, электродвижущая сила
Короткий адрес: https://sciup.org/147232738
IDR: 147232738 | УДК: 62-5 | DOI: 10.14529/power190312
Additional high-frequency signal for sensorless angular positioning of the rotor in synchronous motors
This is a feasibility test for sensorless angular rotor positioning. The paper analyzes the existing methods for sensorless control of angular rotor position in AC motors. It identifies their common drawbacks, one of which is that angular rotor position is difficult to determine at low or zero rotor speed unless a mechanical sensor is in use. The paper presents the functional diagram of a sensorless electric drive based on a synchronous motor. It considers the correlation of induced EMF and high-frequency voltage signal fed to the SM excitation winding. The paper further derives a formula to describe the angular rotor position as a function of phase EMF. The derivation is based on Park-Gorev equations. The obtained dependencies are used in an implemented structural diagram, with the research output being discussed in detail.
Текст научной статьи Разработка методики бездатчикого определения углового положения ротора синхронного двигателя на основании дополнительного сигнала высокой частоты
Развитие электропривода приводит к необходимости решения проблем, связанных с его массогабаритными параметрами [1–3]. Одним из возможных способов, позволяющих добиться положительного результата в этом направлении, является отказ от использования механических датчиков [4–8]. С другой стороны, обойтись без величины углового положения невозможно, поэтому предлагается определять её с помощью косвенных показателей, которыми являются величины напряжения или тока электропривода.
Кроме отмеченного уменьшения габаритных показателей бездатчиковые способы определения углового положения также позволят добиться таких преимуществ, как:
-
- уменьшение стоимости системы электропривода;
-
- увеличение надежности электропривода.
Согласно [9] векторное управление двигателем переменного тока приводит к необходимости определения угловой величины на трёх этапах:
-
- начальное положение ротора;
-
- величина угловой скорости (положения) в диапазоне скорости двигателя, не превышающем 10 % от номинального значения;
-
- номинальный режим работы [10].
В работах [11–18] угловое положение ротора определяется на основе оценивающих моделей. Внедрение подобных решений обусловлено для электроприводов с небольшим диапазоном регулирования скорости (не более 1 : 100) [11–16], либо при невозможности установки датчика на двигатель по причине нехватки места [17, 18].
Недостатки оценивающих моделей заключаются в следующем:
-
- разработанные наблюдатели состояния (Калмана, Люенбергера и др.) не позволяют отслеживать угловое положение ротора во всем диапазоне частот;
-
- в диапазоне низких скоростей величина погрешности углового положения может достигать значительной величины, так как необходимо учитывать поправку на «мертвое время» и время задержки переключения ключей инвертора;
-
- вариации активного сопротивления, взаимоиндукции двигателя переменного тока при его работе под воздействием температуры вносят погрешность в расчеты наблюдателей состояния по определению углового положения ротора.
В работе [19] авторами данной статьи была предложена упрощенная классификация всех без-датчиковых методов определения углового положения. Предложено выделить две группы определения углового положения ротора без использования механического датчика:
-
- на основе противоЭДС;
-
- на основе измерения индуктивности фазы статора.
В работе [20] рассмотрены преимущества, недостатки и ограничения каждого из методов, относящихся к двум выделенным категориям. Основной недостаток рассмотренных бездатчиковых систем заключается в невозможности определения углового положения при нулевой и низкой, не превышающей 10 % от номинальной, скорости.
Целью данной статьи является теоретическое обоснование методики определения углового по- ложения ротора синхронного двигателя с помощью подачи сигнала высокой частоты в обмотку возбуждения.
Для достижения поставленной цели необходимо решить следующие задачи:
-
- проанализировать взаимосвязь углового положения ротора с величинами ЭДС, наводимых на обмотке статора;
-
- разработать структурную схему определения углового положения ротора;
-
- проанализировать полученные результаты величины углового положения ротора в области нулевой и низкой скорости.
Теоретическое обоснование метода определения углового положения ротора синхронного двигателя с помощью инжекции высокочастотного сигнала
Функциональная схема электропривода с без-датчиковым определением углового положения ротора на основе подачи сигнала высокой частоты в обмотку возбуждения представлена на рис. 1.
Сигнал высокой частоты (в работе [19] доказана величина в 1000 Гц) подается в обмотку возбуждения синхронного двигателя. В обмотках статора наводятся ЭДС. Выделение высокочастотной составляющей сигнала напряжения (U af , U bf , U cf ) происходит с помощью полосно-пропускающих фильтров (ППФ). В блоке определения углового положения ротора осуществляется процесс сравнения выделенных сигналов напряжения и сравнение их с переменной составляющей сигнала возбуждения (Uf). Вычисленный сигнал поступает в блок преобразователя частоты для реализации векторного управления синхронным двигателем.
В работе [17] предлагается схема определения углового положения ротора, позволяющая определять искомую величину с точностью в 30°.
Чаще всего подобной точности недостаточно для того, чтобы реализовать векторное управления двигателем переменного тока. Поэтому актуальным является анализ зависимости углового положения от величин напряжений на статоре 9 = f(Ua, Ub, Uc).
Процесс вывода данного выражения начнём с записи уравнений Парка – Горева для синхронной машины [21, 22]:
-
"57+ ®Tq + rid = -ud ;
^Td - ddT - riq = Uq;
^ + rrir = Er;(3)
^ + ^1^ = 0, i = 0^nd;(4)
^^ + rrqkirqk = 0, k = 0 - nq;(5)
Td = Ldid + Madir + Mad ЕГД irdt;(6)
Tq = Lqiq + MaqZk'1irqk;(7)
Tr = Lrir +1 Madid + Mad Z"-i irdt;(8)
Trd1 = Lrd1ird1+| Madid + Madir + +MadZ"=iirdii, i = 0-nd;(9)
1*1
Trqk = Lrqkirqk + 2 Maqiaq + Maq ^j-i irqjk, j*k k=0-nq;(10)
ldi|=MT-|(Tdiq- Tqid),(11)
где r, rr, rdi, rdk – активное сопротивление обмотки статора, обмотки возбуждения i-го продольного и k-го поперечного демпферных контуров;
Ld, Lq – индуктивности обмотки статора;
Lr, Lrdi, Lrdk – индуктивности обмотки возбуж- дения;
Mad – взаимная индуктивность в оси d;
M aq – взаимная индуктивность в оси q;
E r – напряжение возбуждения;
Л = w/p - угловая скорость вращения ротора;
P – число пар полюсов машины.
В качестве начального условия будем рассматривать случай, при котором статор синхронного двигателя не подключен к трехфазной сети переменного тока. Следовательно, в обмотках статора не будет фазных токов. При подобных рассуждениях можно значительно упростить уравнения
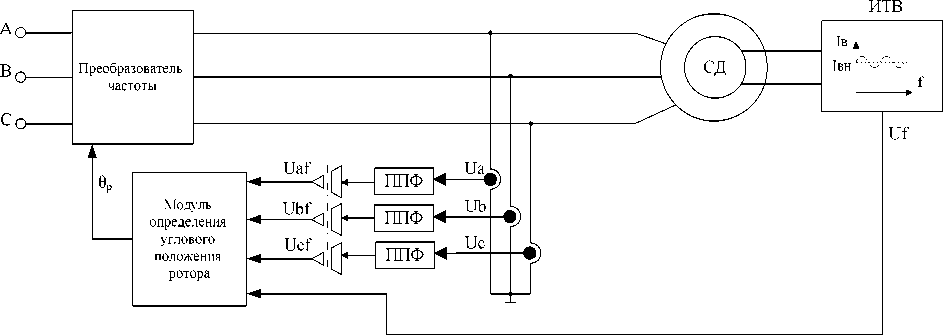
Рис. 1. Функциональная схема электропривода с бездатчиковым определением углового положения ротора
(1)–(11). Определить величину проекции напряже-
приведения. На основании этого получено выра-
ния на ось q:
U q = RSi q+^ фч- ® R ® d . (12)
На основании начальных условий
U q = 0. (13)
Из формулы преобразования координат из-
жение
sin9cos-+cos9sin-1
3 3
------------ - — — .
sin9
вестно, что
U q = | (u a COS(9) + Ub COS (9 — j) +
+ U c COs(9 + 7)), (14)
где u a , u b , u c – мгновенные значения фазных на-
Разделим поочередно левую часть уравнения (17) на sinθ. В результате получим
0,5 + 0,866ctg9 = — к . (18)
Выразим из выражения (18) величину ctg9,
получим ctg9 =
4~°,5 0,866 .
пряжений.
Подставив выражение (14) в (13), учитывая
Окончательный результат приведем к виду
симметричность трехфазной системы, а формулы сложения косинусов, получим yUa Sin (9 +1) + yUb sin(9) = 0.
Запишем выражение (15) в виде:
sin(9+n) = _Ub sin (9) ua.
так же
„ . (-0,86б\
9 JlCt;l- ■ ।
+ 180n,
где n – величина, равная 0, 1 или 2 в зависимости
Отношение U a /U b примем равным k. Выражение (16) может быть упрощено согласно формуле
от положения ротора.
Коэффициент n необходимо использовать по причине наличия в формуле (20) функции arctg.
На основании формулы (20) была проведена модернизация схемы, представленной в [17]. Улуч-
шенная структурная схема модуля определения углового положения ротора представлена на рис. 2.
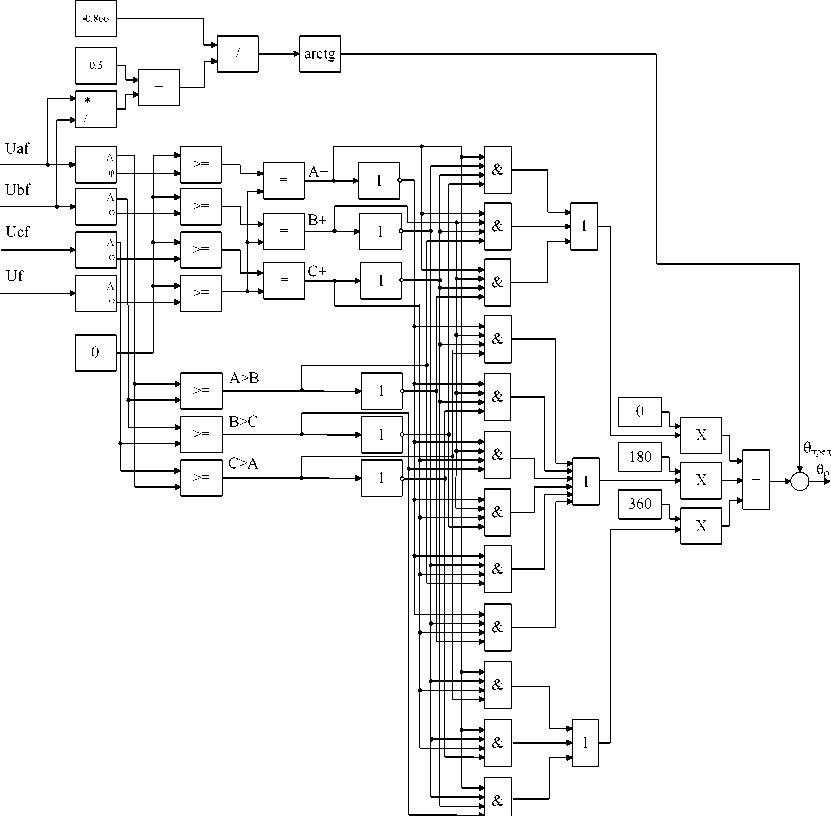
Рис. 2. Структурная схема модуля определения углового положения ротора
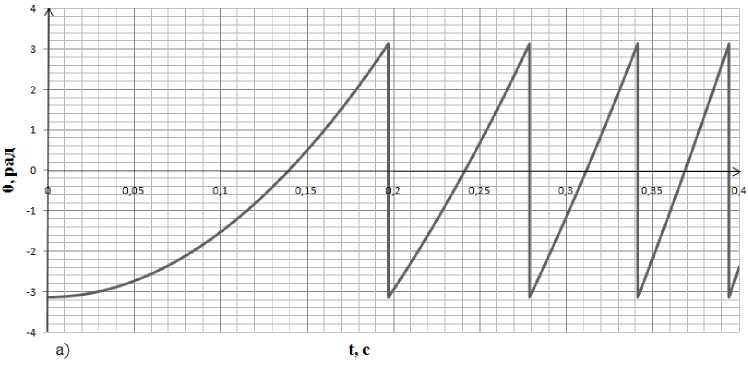
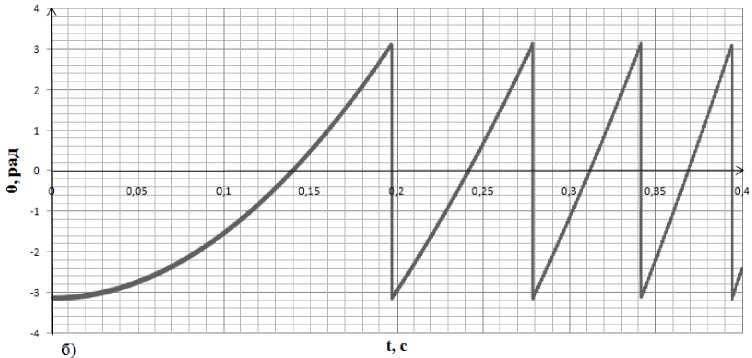
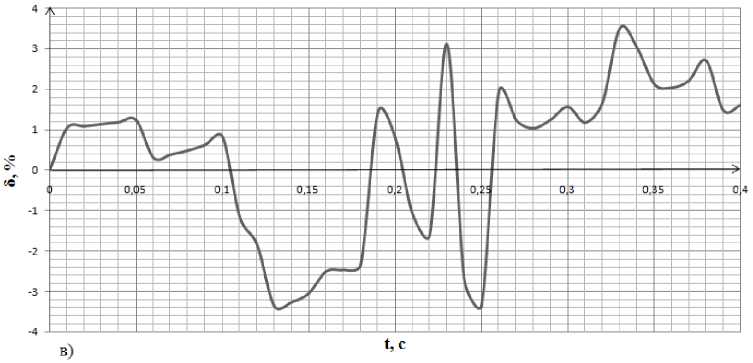
Рис. 3. Сравнение углового положения ротора: а – график изменения углового положения ротора в бездатчиковой системе; б – график изменения углового положения ротора в электроприводе с механическим датчиком; в – график относительной погрешности
Проверка работоспособности электропривода с бездатчиковым определением углового положения ротора была осуществлена за счет сравнения угловой величины, полученной в бездатчиковой модели (рис. 3а), и угловой величины в аналогичном электроприводе с механическим датчиком (рис. 3б). Обе модели разработаны на основе функциональной схемы (см. рис. 1) в программе MATLAB Simulink.
Вывод
В результате проведенного анализа бездатчи-ковых методов определения углового положения ротора двигателей переменного тока выявлено, что они обладают одним общим недостатком, который связан с трудностью определения угловой величины при низких и нулевых скоростях. В статье дано теоретическое обоснование метода определения угловой величины на основе подачи сигнала высокой частоты в обмотку возбуждения ротора синхронного двигателя. Осуществлён вывод выражения, обуславливающего зависимость углового положения ротора от наводимых в статоре высокочастотных составляющих ЭДС. На основе предложенного выражения разработана модель электропривода, анализ которой показал, что величина погрешности предложенного метода при сопоставлении с параметром углового положения, измеренного с помощью механического датчика, не превышает 3,8 %.
Список литературы Разработка методики бездатчикого определения углового положения ротора синхронного двигателя на основании дополнительного сигнала высокой частоты
- Басков, С.Н. Применение векторно-импульсного способа для пуска двигателей переменного ток / С.Н. Басков, А.А. Радионов, А.Б. Святых // Электротехника. - 2013. - № 10. - С. 30-34.
- Виноградов, А.Б. Векторное управление электроприводами переменного тока / А.Б. Виноградов. - Иваново: ГОУ ВПО «Ивановский государственный энергетически университет им. В.И. Ленина», 2008. - 298 с.
- Валов, А.В. Импульсно-векторное управление асинхронным двигателем с фазным ротором / А.В. Валов, Ю.С. Усынин // 12-я Международная научно-практическая конференция студентов и молодых ученых. - 2008. - С. 20-24.
- Baskov, S.N. Vector-pulse control principle of ac motors / S.N. Baskov, K.V. Litsin // Вестник Южно-Уральского государственного университета. Серия «Энергетика». - 2013. - Т. 13, № 1. - С. 92-95.
- Jang, J.-H. Sensorless drive of SMPM motor by high frequency signal injection / J.-H. Jang, S.-K. Sul. - 2002. - 203 p.
- Куксин, А.В. Математическая модель адаптивно-векторной системы управления бездатчикового асинхронного электропривода / А.В. Куксин, А.В. Романов // Вестник Воронежского государственного технического университета. - 2009. - Т. 5, № 11. - С. 85-87.
- Виноградов, А.Б. Адаптивно-векторная система управления бездатчикового асинхронного электропривода ЭПВ / А.Б. Виноградов, И.Ю. Колодин, А.Н. Сибирцев // Силовая электроника. - 2006. - С. 50-55.
- Басков, С.Н. Моделирование системы с промежуточными трансформаторами при векторно-импульсном пуске двигателя переменного тока / С.Н. Басков, К.В. Лицин // Электротехнические системы и комплексы. - 2014. - № 2 (23). - С. 32-35
- Perera, P.D.C. Sensorless Control of Permanent-Magnet Synchronous Motor Drives. PhD thesis / P.D.C. Perera. - Institute of Energy Technology Aalborg University, 2002. - 98 p.
- Чалупа, Л.В. Системы управления электродвигателями на микроконтроллерах фирмы Motorola / Л.В. Чалупа // Chip News. - 1999. - № 1.
- Гончаров, А.С. Анализ современного состояния в области состояния электроприводов с бездатчиковым управлением и методов построения САР в условиях ограниченной информации о векторе состояния / А.С. Гончаров, В.А Поваляев, С.И. Миронов // Электротехнические комплексы и системы управления. - 2008. - № 1. - С. 13-16.
- Xia Changliang. Sensorless position control of a brushless dc motor based on disturbance observer / Xia Changliang // China Electrotech. - 2002. - No. 6. - P. 25-28.
- Сизякин, А.Е. Без датчика положения ротора: решения компании IR для управления ВЭП / А.Е. Сизякин, М.Б. Румянцев // Новости электроники. - 2011. - № 10, - С. 22-28.
- Панкратов, В.В. Тенденции развития общепромышленных электроприводов переменного тока на основе современных устройств силовой электроники / В.В. Панкратов // Силовая интеллектуальная электроника. Специализированный информационно-аналитический журнал. - 2005. - № 2. - С. 27-31.
- Корельский, Д.В. Обзор современных методов управления синхронными двигателями с постоянными магнитами / Д.В.Корельский, Е.М. Потапенко, Е.В. Васильева // Науковий журнал «Радiоелектронiка. Iнформатика. Управлiння». - 2001. - № 3. - С. 155-159.
- Новиков, Ю.Д. Экспериментальное определение индуктивности рассеяния асинхронных двигателей / Ю.Д. Новиков, З.И. Гентковски, Ю.В. Бабин // Электротехника. - 1982. - № 3. - С. 40-41.
- Persson, Jan. Innovative standstill position detection combined with sensorless control of synchronous motors / Jan Persson. - Lausanne, Switzerland, École polytechnique fédérale de Lausanne (EPFL), 2005. - 142 p.
- Baskov, S.N. Determination of the angular position of the rotor of a synchronous motor by connecting a high-frequency signal in the excitation winding / S.N.Baskov, K.V. Litsin // International Siberian Conference on Control and Communications, SIBCON 2015 - Proceedings. - 2015. - С. 7146993.
- DOI: 10.1109/sibcon.2015.7146993
- Sun Don. Direct torque control of a permanent magnet synchronous motor based on fuzzy logic / Sun Don // China Electrotech. - 2003. - No. 1. - P. 33-38.
- Baskov, S.N. Research of vector-pulse start system of synchronous motor with intermediate transformer and sensorless determination of angular rotor position with mathematical methods / S.N. Baskov, K.V. Litsin // 2016 2nd International Conference on Industrial Engineering, Applications and Manufacturing, ICIEAM 2016 - Proceedings.
- DOI: 10.1109/icieam.2016.7910955
- Басков С.Н. Определение углового положения ротора синхронного двигателя в режиме векторно-импульсного пуска / С.Н. Басков, К.В. Лицин, А.А. Радионов // Вести высших учебных заведений Черноземья. - 2014. - № 4. - С. 3-8.
- Горев, А.А. Переходные процессы синхронной машины / А.А. Горев. - М.: Госэнергоиздат, 1950. - 290 с.
