Разработка методики определения параметров процесса сегментации и распознавания образов наземных целей в оптико-электронных головках самонаведения

Автор: Аль Сафтли Фади Хайдар, Баланян Сергей Товмасович, Белоножкин Вячеслав Викторович, Егоров Павел Сергеевич
Рубрика: Управление сложными системами
Статья в выпуске: 1, 2022 года.
Бесплатный доступ
Рассматривается процесс сегментации изображений и распознавания наземных целей в оптико-электронных головках самонаведения управляемых авиационных ракет. Разработана методика определения параметров процесса сегментации и распознавания образов наземных целей и блок-схема искусственной нейронной сети, оптимизированная по количеству нейронов в скрытом слое, для распознавания типовых наземных целей. Проведены исследования сегментации кадров (изображений) из видеопоследовательности с использованием разработанного алгоритма при сегментации изображений со сложным фоном с последующей реализацией процесса распознавания образов типовых наземных целей. Осуществлена программная реализация алгоритма сегментации и обучения нейронной сети с использованием объектно ориентированного языка программирования MatLab & Simulink.
Методика, модель, алгоритм, искусственная нейронная сеть, особые точки, дескриптор, аффинные преобразования, сегментация, распознавание, наземные цели, головка самонаведения
Короткий адрес: https://sciup.org/148323990
IDR: 148323990 | УДК: 623.465.7
Development of a method for determining the parameters of the segmentation process and ground target pattern recognitionin opto-electronic homing heads
The process of image segmentation and recognition of ground targets in a opto-electronic homing head of guided aircraft missiles is considered. A technique has been developed for determining the parameters of the process of segmentation and pattern recognition of ground targets and a block diagram of an artificial neural network, optimized by the number of neurons in the hidden layer, for recognizing typical ground targets. Studies of segmentation of frames (images) from a video sequence were carried out using the developed algorithm for segmenting images with a complex background, followed by the implementation of the process of pattern recognition of typical ground targets. A software implementation of the algorithm for segmentation and training of a neural network has been carried out using the object-oriented programming language MatLab & Simulink.
Текст научной статьи Разработка методики определения параметров процесса сегментации и распознавания образов наземных целей в оптико-электронных головках самонаведения
Методика базируется на сохранении всех существующих нормативных положений, определяющих порядок функционирования управляемой авиационной ракеты класса
Аль Сафтли Фади Хайдар адъюнкт кафедры авиационного вооружения и эффективности боевого применения. Военновоздушная академия имени профессора Н.Е. Жуковского и Ю.А. Гагарина, город Воронеж. Сфера научных интересов: повышение эффективности боевого применения ракет с телевизионными головками самонаведения, распознавание образов типовых наземных целей, нейросетевые алгоритмы. Автор 9 опубликованных научных работ.
«воздух – поверхность» (далее – УАРВП), как информационно-управляющей подсистемы системы управления ракеты и предложений по организации подготовки полетных заданий самолетов оперативно-тактической авиации, обеспечивающих их максимальную эффективность по поражению наземных целей.
В качестве основных требований к УАРВП как огневого средства поражения наземных объектов целесообразно рассматривать:
-
• уровни показателей эффективности, которые характеризуют потребности в расширении круга боевых задач;
-
• эффективность боевого применения УАРВП в условиях реального масштаба времени для сложной фоноцелевой обстановки.
Характеристики методики
Методологической основой разрабатываемой методики является комплексный подход к вопросам оценки автоматического решения задач поиска, обнаружения и распознавания целей, которые определяются возможностями по снижению объема передаваемой на пункт управления видеоинформации и переходу с непрерывного режима работы ради-
Разработка методики определения параметров процесса сегментации и распознавания ...
оканала на эпизодический (по требованию), что приводит к снижению радиозаметности УАРВП и в конечном счете – повышению его живучести.
В основе методики лежит моделирование авиационного удара оперативно-тактической авиации с применением УАРВП типа Х-29ТЭ с использованием различных условий боевого применения. По условиям методической схемы решения задачи исследования считается, что все объекты разбиты на счетное множество классов целей Q = { ^, j = 1...к}.
Предполагается также, что в отсутствии шумов классы являются непересекающимися:
toj П ®i = Ф |i * j . Это означает, что каждый образ цели Z может принадлежать только к одному классу toj множества классов целей Q = { toj, j = 1... k}, и множество П определяется типовыми целями района боевых действий. Классы toj образуют полную группу в про
и:
странстве образов Z : Z е
to j .
В силу исключительной важности наземных объектов основное требование к методи- ке заключается в том, чтобы она обеспечивала получение гарантированных результатов в наихудших условиях сложной фоноцелевой обстановки. Для определения этих наихуд- ших условий центральное место в методике занимает оперативно-тактическая модель в условиях воздействия УАРВП типа Х-29ТЭ, предусматривающая описание процесса поиска, обнаружения и распознавания образа наземной цели при конкретной сложившейся тактической ситуации воздушного боя и последовательное решение ряда частных задач, основанная на взаимоувязке.
-
1. Представленные исходные данные значимости объектов поражения, их уязвимости и наряда УАРВП, назначенного для поражения наземного объекта, которые задаются с помощью нормативных таблиц [6; 8].
-
2. Модели наведения УАРВП типа Х-29ТЭ на наземную цель.
-
3. Модели сегментации и автоматического распознавания образа наземной цели.
Предложенный в статье порядок взаимоувязки вышеперечисленных исходных данных и моделей логически не противоречит реальному процессу оценки обстановки.
В данной методике основным условием распознавания образа наземной цели при нанесении удара УАРВП типа Х-29ТЭ является полное уничтожение распознанной наземной цели.
Для решения перечисленных выше задач и обеспечения приведенного условия в методике предусмотрено решение следующих частных задач.
-
• Математическое описание образов Z в пространстве признаков X = ( x 1 , x 2 ,... xL ) T ; *
Z ^ X .
-
• Выбор наиболее информативных признаков X — , описывающих данный образ минимальным количеством признаков L.
-
• Описание границ классов to j распознаваемых образов Rx ( to j ), j = 1... к .
-
• Поиск алгоритма сегментации и распознавания на основании критерия max Р расп to позволяет однозначно соотнести вектор признаков 5— некоторому классу to j наземных целей.
-
• Оценка вероятности правильного распознавания образа цели P pacn to, .
В соответствии с вышесказанным структура решения задачи синтеза совокупности взаимосвязанных моделей и алгоритмов, обеспечивающих требуемую вероятность распознавания на основе результатов обучения нейросети, представлена на Рисунке 1.
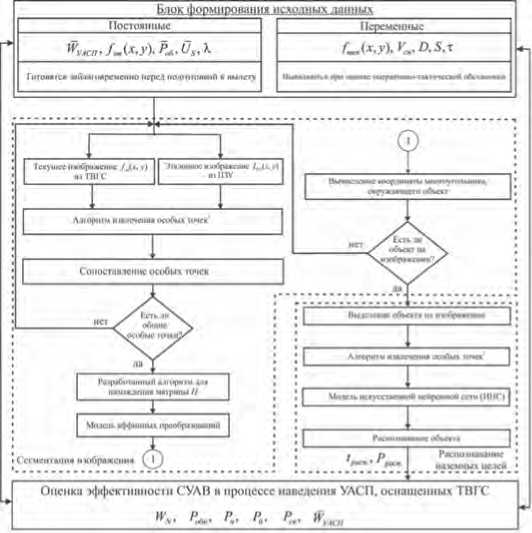
Рисунок 1. Методика определения параметров процесса сегментации и распознавания наземных целей
Блочный характер структуры методики позволяет использовать представленные модели для решения ряда частных задач.
Алгоритм решения задачи по представленной методике
Алгоритм предполагает следующую последовательность расчетов.
На первом этапе при заданных оперативно-тактических условиях боевых действий при авиационном ударе УАРВП типа Х-29ТЭ оценивается обстановка в конкретном секторе участка местности наземной цели, формируется совокупность исходных данных. Например, разработанная методика основана на создании оперативного эталонного изображения местности, окружающей наземную цель. Центр эталонного изображения, соответствующий точке прицеливания (цели), может находиться в любом месте изображения. При этом важно лишь, чтобы изображение в окрестности точки прицеливания было информативно с позиций дальнейшей обработки текущего телевизионного изображения относительно эталонного. Наведение УАСП с телевизионными головками самонаведения (далее – ТВГСН) на цель происходит без вмешательства оператора.
На втором этапе происходит сегментация изображения, которая заключается в следующем:
-
• поступает текущее изображение из ТВГСН на алгоритм извлечения особых точек1 (см. Рисунок 1);
-
• передается эталонное изображение наземной цели из памяти ТВГСН в алгоритм извлечения особых точек1;
-
• сопоставляются особые точки между текущим и эталонным изображении наземной цели.
Разработка методики определения параметров процесса сегментации и распознавания ...
Далее находятся общие особые точки определенным алгоритмом на изображении наземной цели, в котором, во-первых, вычисляется матрица Н с помощью разработанной модели аффинных преобразований между общими особыми точками; во-вторых, с помощью матрицы Н вычисляются координаты прямоугольника, окружающего объект; в-третьих, автоматически выделяется наземная цель прямоугольником на изображении, центр которого совпадает с центром наземной цели.
На третьем этапе происходит распознавание наземной цели на изображении, последовательность которого следующая:
-
• извлекаются определенным алгоритмом особые точки2 (см. Рисунок 1) на конкретной наземной цели;
-
• обрабатываются особые точки на изображении наземной цели с помощью разработанной модели искусственной нейронной сети;
-
• распознается образ наземной цели по правилу совпадения минимум двух общих особых точек на изображениях.
Дальнейший рост количества общих особых точек между текущим и эталонным изображением наземной цели говорит лишь об увеличении точности процесса распознавания.
На следующем этапе работы методики осуществляется расчет показателей эффективности и сравнение их с требуемым значением. Если значения показателей не удовлетворяют требуемому уровню, то на основе информации о распознавании наземной цели, сформулированной в статье как условие достаточности, отвечающее основной цели функционирования системы управления ракетой и уровню показателя эффективности ее боевого применения, осуществляется формирование множества возможных сочетаний исследуемых показателей по управлению процессом распознавания, обеспечивающим максимальное значение (не ниже заданного) показателя его эффективности W УАСП с помощью рандомизированного поискового алгоритма с «двойным возвратом» [5], который обладает достаточной адаптивностью для решения рассматриваемой задачи, а также возможностью решать многокритериальные задачи, имея при этом высокое быстродействие.
Полученное множество возможных сочетаний исследуемых показателей, определяющих правильное распознавание образа наземной цели, подразумевает необходимость решения задачи оперативного выбора наземной цели с учетом предпочтений лица, принимающего решение на данном множестве. В результате получается выбор условий применения УАРВП, максимизирующих его боевое применение.
Сегментация цифровых изображений позволяет перейти от представления данных в виде набора точек с различной яркостью к описанию сцены как композиции объектов, каждый из которых характеризуется формой, площадью, взаимным расположением, яркостными, текстурными и другими признаками [7]. Сегментация изображения – это разделение изображения на области, однородные по некоторому критерию. Цель сегментации состоит в упрощении или изменении представления изображения, чтобы его было легче анализировать в дальнейшем. Сегментация основывается на измерениях, проведенных над изображением, и может быть уровнем серого, цветом, текстурой, глубиной или движением [10].
Оператор наведения УАСП по изображению может интуитивно понять, что на изображении находится. Для системы управления УАСП любое изображение – это набор данных информативных признаков. Необходимо определить, как система управления УАСП может обнаружить и распознать объекты на изображении [2].
У каждого изображения есть особые точки. Особые точки – это такие точки, по которым можно классифицировать изображение, распознать его, некая особенность изображения, его уникальность. Как правило – это угловые точки, либо те, где резко меняется цвет, яркость и др. Нужно выбирать такие точки, которые вносят определенный вклад в характеристику изображения, также необходимо считать особыми такие точки, которые с большой вероятностью будут найдены на другом изображении. Каждый алгоритм обнаружения особых точек должен гарантировать инвариантность относительно любых преобразований (искажений) изображений.
Для этого каждой особой точке необходимо присвоить описание (дескриптор), которое будет одинаковым на разных изображениях.
Дескриптор – это идентификатор особой точки, который делает ее уникальной относительно остальных точек. Разумеется, используя дескрипторы, нельзя забывать об инвариантности относительно преобразования (искажения) изображений.
Для повышения производительности обнаружения особых точек к инвариантному вращению и определению ориентации изображения может быть реализовано описание особой точки на более позднем этапе процесса распознавания цели. Вектор, состоящий из объединенных значений всех 64 дескрипторов, нормализуется на последнем шаге разработанного алгоритма по обнаружению особых точек на изображении [2].
В итоге получается следующая последовательность по сопоставлению изображений.
-
1. На изображениях находятся особые точки и их дескрипторы.
-
2. По дескрипторам среди этих точек выявляются пары соответствующих точек на эталонном и текущем изображении.
-
3. По этим парам идет построение модели преобразования (вращения) изображений.
Модель аффинных преобразований
Если матрицу вращения
(xA (x) ( tx ]
заменить
I ' 1 =RI l + lt I , l y J I y J I ty J
общей невырожденной матрицей, то получим преобразование [9]
или в матричном виде
x' = ax + by + c ,
y' = dx + ey + f ,
( x i ( a
X ' = AX + C, X ' = I , I, A = | J l y J I d
b e
I c i
C=lfJ,
где A – матрица поворота; С – вектор трансляции (сдвига); X – координаты эталонного объекта; X' - координаты текущего объекта.
I x I
X ' = AX + C, X ' = I , I, l у J
( a
A = 1 d
b e
I c i
C =lf J.
Основные аффинные преобразования и их соотношения преобразования в однородных координатах показаны в Таблице 1 [4].
Алгоритм нахождения матрицы Н (RANSAC), в которой параметры оцениваются итеративно из набора наблюдаемых данных, содержащих выбросы, предполагает, что данные содержат правильные и/или неправильные данные (шум).
Разработка методики определения параметров процесса сегментации и распознавания ...
xi yi 1
« H
x
.1 yi
паю 1111 паю порог *
где xi , yi - координаты особых точек эталонного изображения; x' , y' - координаты особых точек текущего изображения; Н - матрица преобразования; Ng^ — количество особых точек на эталонном изображении; N”^ - количество особых точек на текущем изображении; З порог - пороговое значение.
Таблица 1
Основные аффинные преобразования
|
Преобразования |
Рисунок |
Матрица |
|||||||
|
Сдвиг |
■ "* ■ |
x У 1 |
.' |
" 1 0 tx " 01 ty _ 0 0 1 _ |
" x У 1 |
||||
|
Увеличение |
1И_—ё^^^^' ^^^^1—. |
x У 1 |
= J |
Г s 0 0 1 0 s 0 0 0 1 |
" x " У 1 |
||||
|
Поворот |
x У 1 |
= ] |
cos O - sin O 0 sin 0 cos O 0 0 0 1 |
x 1 У 1 _ |
|||||
|
Движение |
x У 1 |
Г = |
cos O - sin O tx sin O cos O ty 0 0 1 |
x У 1 |
|||||
|
Подобие |
V 0 л |
Г [ |
x У 1 |
= [ |
s cos O - s sin O tx sin O s cos O ty 0 01 |
-- x 1 У |
1 J |
||
|
Аффинное преобразование |
1 —1 ~^^^ -------•; о v |
x У ' 1 |
Г = [ |
s cos O - sin O tx s sin O cos O ty 0 0 1 |
"x У [ 1 |
1 1 |
|||
Последовательность в выполнении операций алгоритма следующая.
-
• наличие текущего и эталонного изображений (см. Рисунок 2, а , б );
-
• извлечение из изображений особых точек (см. Рисунок 2, в , г );
-
• сопоставление этих особых точек между текущим и эталонным изображением (см. Рисунок 2, д );
-
• наличие общих особых точек между текущим и эталонным изображениями для передачи на обработку алгоритмом RANSAC (см. Рисунок 2, е ), чтобы определить особые точки на изображении наземной цели в ТВГСН УАРВП;
-
• нахождение матрицы геометрического преобразования Н аффинными преобразованиями (5) и вычисление координат прямоугольника, окружающего объект (цель) (см. Рисунок 2, ж ).
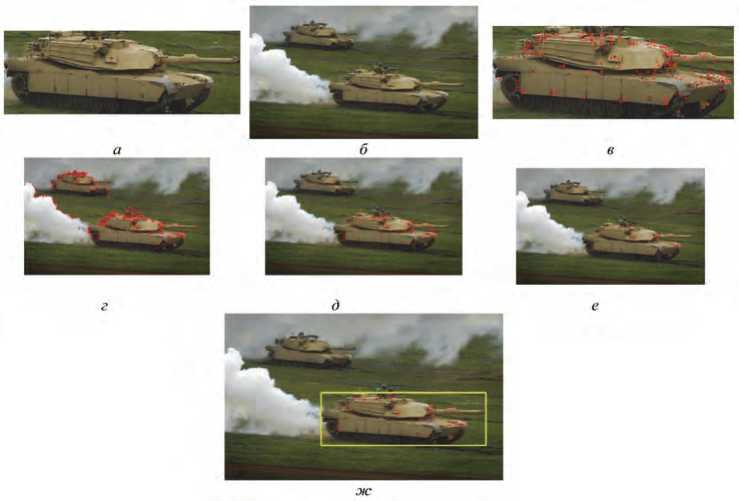
Рисунок 2. Разработанный алгоритм сегментации и распознавания с вычислением особых точек на изображении наземной цели в ТВГСН УАРВП: а – эталонное изображение; б – текущее изображение; в – особые точки на текущем изображении; г – особые точки на эталонном изображении; д – особые точки на эталонном изображении после сопоставления с текущим; е – особые точки на эталонном изображении, обработанные алгоритмом RANSAC; ж – вычисление координат прямоугольника, окружающего объект (цель)
На Рисунке 2 показано, что из входного изображения производится вычисление вектора признаков (64 признаков) по алгоритмуRANSAC (см. Рисунок 3). Вектор признаков для пока не известного объекта поступает на каждый элемент от одного слоя к другому до достижения выходного слоя. Количество нейронов во входном слое 64 и в скрытых слоях – 37. Используя выходной вектор, объект можно классифицировать по классу, к которому он принадлежит (например, джип или танк) (см. Таблицу 2).
Разработка методики определения параметров процесса сегментации и распознавания ...
Таблица 2
Распознавание по классу цели
|
Выход сети |
Тип цели |
|
[1 0] |
джип |
|
[0 1] |
танк |
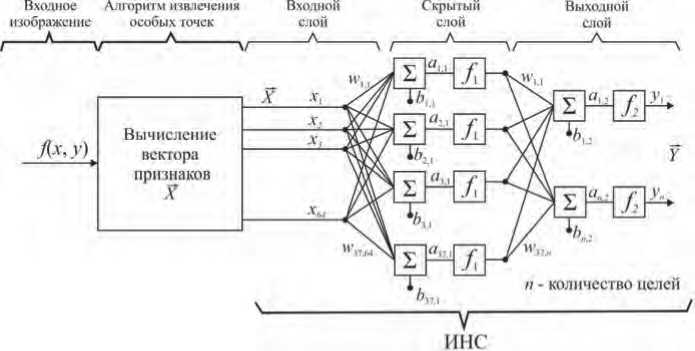
Рисунок 3. Блок-схема модели искусственной нейронной сети, оптимизированная по количеству нейронов (37) в скрытом слое
Таким образом, объединив модели и алгоритмы так, как это показано на Рисунке 1, удается сформировать методику, позволяющую установить количественные соотношения между принятыми показателями эффективности применения УАРВП с ТВГСН и исследуемыми процессами сегментации и распознавания – методику оперативного выбора наземных целей на применение УАРВП, оптимальных по максимальному значению показателя обученности нейросети, обеспечивающего требуемую вероятность поражения наземной цели. В свою очередь, эта методика позволяет оперативно проводить весь объем расчетов, необходимых для всесторонней оценки эффективности применения УАРВП с ТВГСН в различных условиях боевого применения.
Выводы
Использование разработанного алгоритма по нахождению матрицы Н и модели аффинных преобразований на этапе сегментации изображения позволяет определить общие особые точки только на этапе сопоставления эталонной наземной цели с текущим изображением и вычислить матрицу (5) преобразования Н , определяющую координаты прямоугольника, окружающего объект. Таким образом определяется точное местоположение желаемой цели.
Использование искусственной нейронной сети в определенной зависимости от размера обучающей выборки ( N Р = 2098) в разработанной методике по определению параметров процесса сегментации и распознавания наземных целей в ТВГСН приводит к достаточно высокой точности (вероятность распознавания Р рат > 0,94 ; время распознавания t рот < 0,03 , ошибка распознавания А рот < 0,01 ).
Исследования по оценке эффективности системы управления авиационным вооружением в процессе наведения управляемых авиационных ракет, оснащенных телевизионными головками самонаведения, показывают, что время распознавания разработанного алгоритма будет меньше ( t расп < 0,03 с ), чем у существующих ( t расп > 0,2 с). Время необходимое для процесса обнаружения наземной цели уменьшится ( t o6 „ < 0,02 с), а при вероятностях обнаружения наземной цели ( Р о6н > 0,95) и своевременного выполнения алгоритма распознавания ( Р с “лг = 0,99 ) вероятность поражения наземной цели одной ракетой составит ( W = 0,85)в условиях сложной фоноцелевой обстановки района цели [3].
Список литературы Разработка методики определения параметров процесса сегментации и распознавания образов наземных целей в оптико-электронных головках самонаведения
- Алгоритм RANSAC. URL: https://ru.wikipedia.org/wiki/RANSAC.
- Аль Сафтли Ф.Х., Баланян С.Т. Исследование алгоритма по обнаружению особых точек на изображении и использование его в системах наведения ракет // Воздушно-космические силы. Теория и практика. 2020. № 15. С. 193-208.
- EDN: DAZPNW
- Аль Сафтли Ф.Х., Баланян С.Т. Предварительные исследования системы управления авиационным вооружением в процессе наведения управляемых авиационных средств поражения, оснащенных телевизионными головками самонаведения: сборник статей по материалам III Всероссийской научно-практической конференции "Калибр" (Воронеж, 27-28 февраля 2020 г.). Воронеж: ВУНЦ ВВС "ВВА", 2020. С. 3-12.
- Заливин А.Н., Соловьев В.И. Исследование методов и разработка алгоритма распознавания объектов на видеоданных. Белгород: БелГУ, 2018. 215 с.
- Ивахненко А.Г., Юрачковский Ю.П. Моделирование сложных систем по экспериментальным данным. М.: Радио и связь, 1987. 120 с.
- Лопатинская О.В., Орлов В.Л., Шаропатый А.В. Распределение сил и средств авиации по наземным объектам противника в массированном ударе воздушной операции // Военная радиоэлектроника. 1987. № 6. С. 21-32.
- Минченков М.В., Хельвас А.В., Юрин Д.В. Алгоритм автоматической сегментации изображений для систем технического зрения. Обработка информации и моделирование. МФТИ, 2002. -5-7417-0184-1.
- ISBN: 5-7417-0184-1
- Пособие по определению вероятности поражения типовых наземных целей, ожидаемого результата боевых действий и потребного наряда самолетов для выполнения задачи. М.: Воениздат, 1986. 76 с.
- Спектр. Цифровая обработка изображений в информационных системах: учебное пособие / И.С. Грузман, В.С. Киричук, В.П. Косых, Г.И. Перетягин, А.А. Новосибирск: Издательство НГТУ, 2000. 168 с.
- Ramadevi Y., Sridevi T., Poornima B., Kalyani B. Сегментация изображения и распознавания объектов на основе технологии выделения контуров // Международный журнал компьютерных наук и информационных технологий. 2010. Т. 2, № 6. С. 132-147.
