Разработка полезной нагрузки спутника Cyclops формата Cubesat

Автор: Сотникова Н. В., Кададова А. В., Кадочников Д. М., Уткин В. В.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 1 т.24, 2023 года.
Бесплатный доступ
На протяжении последних десятилетий увеличивается количество запускаемых спутников формата CubeSat. Данные спутники обладают рядом преимуществ: малый срок разработки, невысокая стоимость, возможность модификаций для определенных научных задач и тестирование технических решений и новых разработок. В данной статье излагается описание полезных нагрузок малого космического аппарата: спутника формата CubeSat 3U CYCLOPS, созданного в Балтийском государственном техническом университете «ВОЕНМЕХ» имени Д. Ф. Устинова в рамках выигранного гранта по программе Space-Pi. Цель исследования - создание, тестирование и изучение работы модулей полезных нагрузок аппарата, построенных с применением коммерчески доступных компонентов, в условиях космического полета. В тексте описана структура взаимодействия полезной нагрузки и платформы «ОрбиКрафт-Про 3U» от компании ООО «Спутникс». Рассматривается процесс создания платы управления нагрузками. Описано программное обеспечение системы управления мехатронного и многостепенного исполнительного модулей с применением логирования и коррекцией ошибок. Помимо вышеперечисленных модулей, была разработана и система управления полезными нагрузками, позволяющая осуществлять серию экспериментов при нахождении малого космического аппарата на орбите. В статье объясняется принцип работы взаимодействия космического аппарата с землей через специальное программное обеспечение Houston сontrol сenter application и Houston Telnet. В результатах описаны проведенные тестирования для механических узлов космического аппарата. Приведены примеры полученных пакетов телеметрии с борта аппарата. В статье также отображены дальнейшие планы проекта и перспективы применения разработанной аппаратуры для внедрения в крупногабаритные космические системы и комплексы. Также в рамках этого проекта студентам и школьникам удалось получить инженерный опыт разработки устройств, предназначенных для работы в условия космического пространства.
Малые космические аппараты, полезная нагрузка, модуль, спутник, система связи, can, cubesat, telnet
Короткий адрес: https://sciup.org/148326247
IDR: 148326247 | УДК: 629.78 | DOI: 10.31772/2712-8970-2023-24-1-144-154
Development of the Cyclops Cubesat payload
The number of CubeSat satellites launched has been increasing over the past decades. These satellites have a number of advantages: short development time, low cost, possibility of modifications for certain scientific tasks and testing of technical solutions and new developments. This article describes payloads of a small spacecraft: CubeSat 3U CYCLOPS designed by D.F.Ustinov Baltic State Technical University "Voenmeh" within grant under Space-Pi program. The purpose of the study is to create, test and study the performance of payload modules of the vehicle, built using commercially available components, under space flight conditions. The text describes the structure of interaction between the payload and the OrbCraft-Pro 3U platform from Sputnix LLC. The process of development of payload control board is considered. The control system software for mechatronic and multiaxis actuator modules with logging and error correction is described. In addition to the above-mentioned modules, the payload control system was also developed to carry out a series of experiments in the presence of a small spacecraft in orbit. The paper explains how the spacecraft communicates with the ground via special software Houston control application and Houston Telnet. The results describe tests performed on the mechanical components of the spacecraft. Examples of telemetry packets received from on-board the spacecraft are given. The article also reflects further plans for the project and the prospects of using the developed hardware for implementation in large-scale space systems and complexes. Also as part of the project students were able to gain engineering experience in the development of devices designed to work in space conditions.
Текст научной статьи Разработка полезной нагрузки спутника Cyclops формата Cubesat
На сегодняшний момент идет активное освоение околоземного космического пространства. Проектирование и запуск малых космических аппаратов (МКА) стал доступен школьникам и студентам. Растет перечень программ и грантов, предоставляющих доступ к космическим технологиям будущим инженерам космической отрасли. Самый популярный формат наноспутников для подобных проектов – МКА CubeSat 3U. CubeSat имеет размер одного юнита (1U) 100×100×100 мм, грани которого покрыты солнечными панелями, внутри аппарата расположена научная аппаратура [1; 2]. Самыми трудоемкими по времени и приоритету в цикле разработки космического изделия являются испытания технических решений, задействованных в полезной нагрузке.
Тестирование полезной нагрузки (ПН) в космосе на базе CubeSat позволяет использовать и тестировать элементную базу и технологии для более серьезных крупногабаритных космических аппаратов [3].
О проекте
В Балтийском государственном техническом университете «ВОЕНМЕХ» имени Д. Ф. Устинова» в рамках выигранного конкурса «Дежурный по планете» (5 очередь) проекта Space-pi, организованного Фондом содействия инновациям, велась разработка ПН для МКА формата CubeSat 3U. Миссия проекта Space-pi – вовлечение молодежи при решении инженерных задач в космической отрасли [4].
Студенты из Центра научно-технического творчества нашего вуза участвовали в разработке многостепенного исполнительного модуля и мехатронного модуля для отработки инженерных решений с использованием спутниковой платформы CubeSat «ОрбиКрафт-Про 3U» от компании «Спутникс» [5]. Цель проекта – обучение студентов, создание, тестирование и изучение работы модулей полезных нагрузок аппарата, построенных с применением коммерчески доступных компонентов, в условиях космического полета [6].
Описание нагрузок
В рамках проекта Space-pi в нашем вузе создали три ПН: многостепенной исполнительный модуль (ИМ), мехатронный модуль и модуль накопления энергии на основе суперконденсаторов. Батарея суперконденсаторов способна накапливать заряд и импульсно выдавать большой ток для обеспечения питания приборов с большим энергопотреблением без опасности падения напряжения основной батареи и перехода КА в аварийный режим. Более подробная информация про модуль системы питания представлена в источнике [7].
Многостепенной ИМ предназначен для стабилизации и позиционирования оптического устройства. Структурно модуль представляет двухстепенную платформу, обеспечивающую изменение углового положения выходного кинематического звена в пределах, необходимых для ориентации бортовых приборов и устройств. В основе создаваемой платформы лежит ряд движителей, позволяющих обеспечить высокие показатели быстродействия и надежности, особенно в условиях пониженных температур.
Мехатронный модуль предназначен для отработки технических решений по созданию универсальных исполнительных устройств, являющихся основой построения малогабаритных робототехнических комплексов на базе платформы CubeSat. Механика, предназначенная для выдвижения или раскрытия частей для космических систем в космосе, является одной из наиболее сложно тестируемых элементов на земле, поэтому мехатронный модуль было решено приспособить для выдвижения какой-либо ПН (например, передающей антенны). Раскрываемая антенная система является одной из самых частых мехатронных ПН МКА [8].
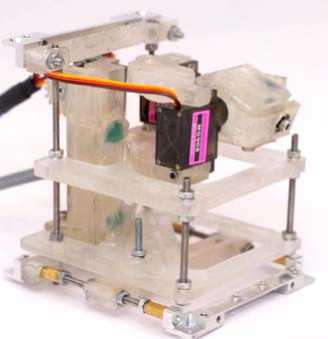
Рис. 1. Мехатронный и многостепенной модули в сборке
Модуль предназначен для линейного передвижения на расстояние не менее 50 мм. Для выдвижения рейки был выбран сервопривод mg90s с углом 180о. Для контролирования положения рейки в конструкцию мехатронного модуля была введена обратная связь – датчики, разработанные в нашем вузе. Особенностью датчиков является возможность изменения расстояния срабатывания в зависимости от установленного на плате датчика номинала сопротивления резистора.
Fig. 1. Mechatronic and multiaxis modules in the assembly
Проектирование и расчет всех узлов полезных нагрузок проводились при помощи специального программного обеспечения [9]. Созданные 3D модели деталей были изготовлены с применением аддитивных технологий при помощи FDM принтера. Конечный вид обоих ПН в сборке представлен на рис. 1.
Структура взаимодействия ПН с платформой
Разработанная полезная нагрузка интегрировалась в платформу CubeSat «ОрбиКрафт-Про 3U». Структурная схема взаимодействия ПН и бортового цифрового вычислительного модуля (БЦВМ) платформы от компании «Спутникс» представлена на рис. 2. Принцип работы заключается в следующем: включение микроконтроллера (МК) ESP32, управляющего многостепенным ИМ и мехатронным модулем, происходит главным БЦВМ – Raspberry Pi СM3. После включения МК формируется управляющий сигнал широко-импульсной модуляции (ШИМ), который поступает на серводвигатели модулей. Сигнал вызывает вращение серводвигателей и приводит модули в движение. Для двухстепенной платформы выходной управляющей величиной являются углы поворота платформы по двум осям, для мехатронного модуля такой величиной является положение рейки. Камера, находящаяся на двухстепенной платформе, подключена напрямую к БЦВМ через CSI. Это позволяет получать снимки в любое время, не требуя включения ESP и дополнительного общения ESP с БЦВМ. Отдельно осуществляется управление модулем питания через МК STM32L053R8T6. Подобное разделение в управлении ПН позволяет реализовывать переключение системы основного питания на питание с модуля суперконденсаторов, что позволяет тестировать механическую нагрузку от разных источников.
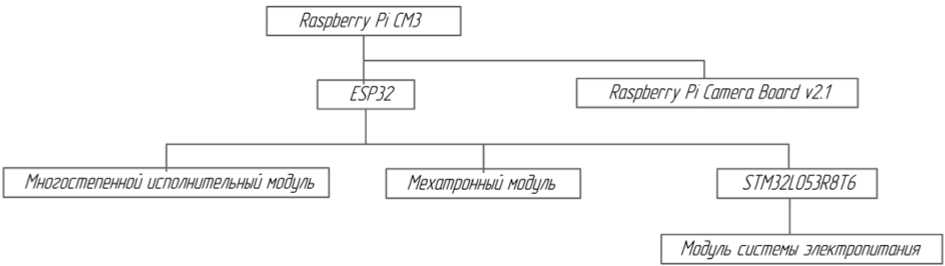
Рис. 2. Структурная схема взаимодействия ПН с БЦВМ
Fig. 2. The structural scheme of interaction of payload with board computer
На рис. 3 описано взаимодействие модулей космического аппарата. По основной CAN (Controller Area Network) шине общаются: контроллер платформы, бортовой ультракоротковолновой (УКВ) приемопередатчик, БЦВМ Raspberry Pi CM3, контроллеры систем ориентации и электропитания. Наземная электронно-вычислительная машина (ЭВМ) с комплектом специализированного программного обеспечения также является частью CAN шины аппарата. БЦВМ связана по интерфейсу UART с МК ПН ESP32. ESP формирует ШИМ сигнал для управления сервоприводами и регулирует положение мехатронного ИМ по каналу обратной связи. Контроль режима резервного источника питания на базе суперконденсаторов ведется при помощи дискретного выхода.
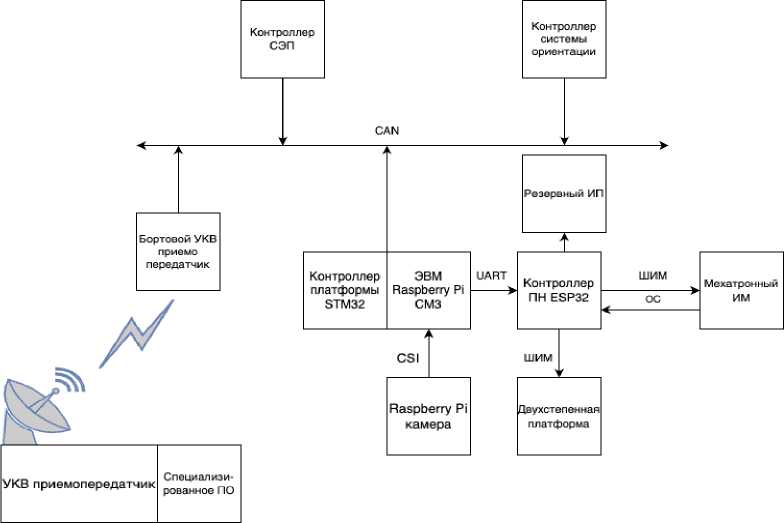
Рис. 3. Схема взаимодействия модулей КА
Fig. 3. Scheme of interaction of the spacecraft modules
Для обеспечения совместного доступа модулей к шине используется стек протоколов разного уровня абстракций. В основе протокола передачи данных лежит протокол CAN. Он описывает физический и канальный уровни в стандартной модели OSI (The Open Systems Interconnection model). Этот протокол является одним из самых популярных и надежных способов взаимодействия блоков МКА [10]. Для обеспечения передачи длинных сообщений системой адресации между источником и приемником канальный уровень расширен более высокоуровневым протоколом
UniCAN (универсальная CAN-шина), описанным ниже. Поверх протокола UniCAN переносятся данные прикладного уровня. Каждый пакет содержит в себе адрес источника сообщения и адрес приёмника, которые переносятся в поле идентификатора CAN-кадра.
Протокол поддерживает передачу сообщений трёх форматов – коротких сообщений, длинных сообщений и сообщений об ошибках. Короткие сообщения позволят передавать данные длиной не более 6 байт. Они передаются одним CAN-кадром.
Длина данных определяется длиной кадра, переносимой в поле DLC (Data Length Code-код длины поля данных) CAN-кадра, за вычетом двух байт для передачи идентификатора сообщения. Поле «данные» коротких сообщений всегда равно нулю. Контроль правильности передачи обеспечивается контрольной суммой CAN-протокола.
Структура поля данных CAN-кадра показана в табл. 1.
Таблица 1
Поле данных CAN-кадра при передаче короткого UniCAN-сообщения
|
Байты поля данных CAN-кадра |
||||||
|
0 1 1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Идентификатор сообщения |
Data 0 |
Data 1 |
Data 2 |
Data 3 |
Data 4 |
Data 5 |
Длинные сообщения состоят из нескольких CAN-кадров.
Общая структура передачи на примере 26-битного сообщения показана в табл. 2.
Таблица 2
Общая структура сообщения на шине
|
Команда старта |
Данные 0..7 |
Данные 8..15 |
Данные 16..23 |
Данные 24…26+CRC |
|
0xFFFE MSG_ID Len |
CRC |
Формат служебной команды передачи начала длинного сообщения представлен в табл. 3.
Таблица 3
Формат команды старта длинного сообщения
|
Байты поля данных CAN-кадра |
||
|
0 1 1 |
2 1 3 |
4 1 5 |
|
Идентификатор старта 0xFFFE |
Идентификатор сообще-ния(MSG_ID) |
Длина пакета (Length) |
В ответ на ошибки, происходящие при приеме сообщения UniCAN, могут быть высланы сообщения об ошибках, формат которых показан в табл. 4.
Таблице 4
Формат сообщения об ошибке
|
Байты поля данных CAN-кадра |
||
|
0 1 1 |
2 1 3 |
4 1 5 |
|
Идентификатор сообщения об ошибке 0xFFFF |
Идентификатор ошибочного сообщения (Failed_MSG_ID) |
Код ошибки (Error_Code) |
Разработка платы управления ПН
Плата разрабатывалась в два этапа: макетирование и изготовление лётного образца. На первом этапе все необходимые компоненты были соединены проводами для подтверждения корректной работы всех компонентов и разработки ПО. На втором этапе был изготовлен и проверен летный образец платы для интеграции в аппарат.
Данная плата работает совместно с подсистемой питания, благодаря которой можно переключать питание мехатронного модуля в следующих режимах: питание от бортовой сети, аккумуляторов, суперконденсаторов и зарядка аккумуляторов или суперконденсаторов. Упрощенная принципиальная схема платы представлена на рис. 4. Такой функционал позволяет тестировать различные источники питания сервоприводов в процессе полета. Переключение режимов питания выполняется с помощью транзисторных ключей.
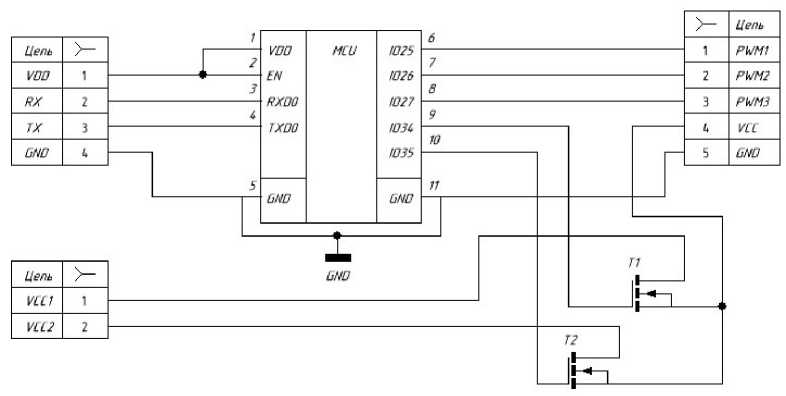
Рис. 4. Принципиальная схема платы управления полезной нагрузкой
Fig. 4. Schematic diagram of the payload control board
Основная задача платы – генерация сигналов широтной импульсной модуляции для управления сервоприводами, а также валидация их правильного положения при помощи обратной связи от бортовой сети датчиков. Необходимость разработки продиктована более строгими временными требованиями к параметрам генерируемого сигнала при реализации механизма плавного пуска и остановки, которые не достижимы при использовании аппаратных средств от бортовой системы из-за их высокой ошибки дискретизации. Благодаря разработанной плате был предусмотрен алгоритм плавного пуска и остановки сервоприводов, который рациональнее расходует небольшой энергоресурс МКА и увеличивает срок службы мехатронного модуля.
Плата управления соединена с бортовой системой по интерфейсу USB через конвертер UART. Бортовая система представляет собой микрокомпьютер Raspberry Pi СМ3, к которому можно подключиться по радиоканалу с Земли, используя интерфейс telnet. Плату управления полезной нагрузкой с подсистемой питания можно увидеть на рис. 5.
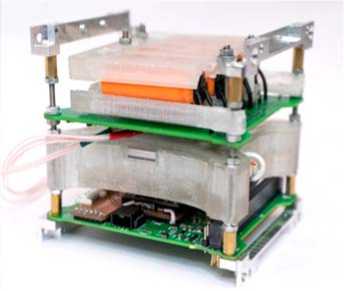
Рис. 5. Плата управления полезной нагрузки с подсистемой питания
Fig. 5. Payload control board with power supply subsystem
Разработка системы управления
Программа для управления мехатронным модулем для платы ПН с микроконтроллером ESP32-S осуществляет подачу питания, управление сервоприводов и считывание состояний концевиков.
Алгоритм плавного пуска для сервоприводов реализован за счет интегрирования установочного угла поворота для получения промежуточных состояний. Затем, скорость поворота ограничивается и выполняется попеременно по опорным точкам.
Для управления мехатронным модулем были написаны три команды: задвижение рейки, выдвижение и цикл, состоящий из задвижения и выдвижения с задержкой между командами в 2 с. Команды реализовывались с проверкой текущего положения по датчикам, если рейка находит- ся в половину выдвинутом состоянии, то перед выполнением некоторых из команд она задвинется в исходное положение. Это необходимо, чтоб избежать выпадения рейки из конструкции.
Для управления платой ПН первоначально была разработана программа для операционной системы (ОС) Windows. Подобное решение было принято для возможности тестировать управление ПН через COM-порт (communications port) компьютера. Впоследствии программа была портирована на бортовой микрокомпьютер с ОС Linux, где успешно была отработана связь с платой управления ПН.
В ПО была реализована возможность расширенного протоколирования для отслеживания выполнения кода и выявления возникающих проблем в процессе выполнения команд. Приложение предоставляет подробную информацию о состоянии модуля, включая информацию о любых ошибках или исключениях, которые могли произойти.
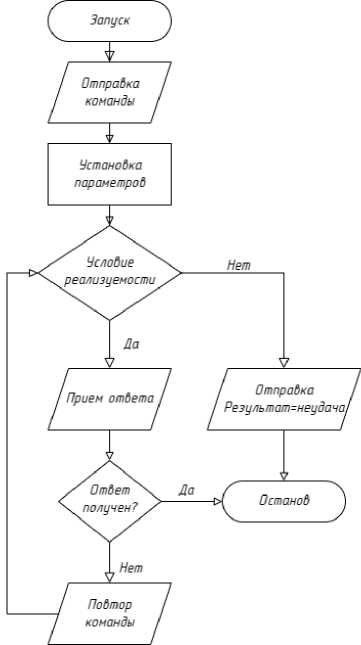
Рис. 6. Алгоритм работы с полезной нагрузкой
Fig. 6. Algorithm of the payload operation
Одним из ключевых преимуществ такого подхода является то, что оно позволяет обнаруживать и диагностировать проблемы в режиме реального времени. Это особенно важно при работе со сложными системами, в частности, работающими в околоземном пространстве, поскольку позволяет быстро выявлять и устранять проблемы до того, как они могут нанести значительный ущерб аппарату. Протоколирование позволяет отслеживать историю работы модуля, что может быть бесценным при попытке диагностировать и устранить проблемы, возникшие в прошлом. Также это может помочь выявить закономерности или тенденции, которые могут указывать на потенциальные проблемы в будущем. Еще одной важной функцией разработанного ПО является то, что его можно использовать для создания подробных отчетов, которые могут быть использованы при разработке других аппаратов.
Устойчивость работы с бортовой системой была усилена путем ввода контрольной суммы команд. При несовпадении контрольной суммы или задания некорректных параметров углов поворота и/или недопустимых скоростей поворота микроконтроллер сигнализирует об этом бортовой системе для повтора передачи команды на выполнение. Упрощенный алгоритм работы с полезной нагрузкой представлен на рис. 6.
Результаты тестирования
Испытания полезной нагрузки были проведены в Инжиниринговом центре Военмеха, в котором имеется специализированное оборудование для проведения испытаний различных технических изделий, в том числе разрабатываемых для эксплуатации в экстремальных условиях, напри- мер, таких как космическое пространство [11]. В частности, были проведены термовакуумные, вибрационные испытания по трем осям и ударные испытания конструкции полезной нагрузки.
После проведения тестирования были выявлены и исправлены недочеты конструкции. После доработки ПН успешно прошла испытания и отправилась в Спутникс, где было проведено дополнительное тестирование с учетом особенностей ракеты-носителя запланированного для запуска спутника. Фото тестирования аппарата представлено на рис. 7. После тестирования все материалы оказались устойчивы к условиям космического полета. Фото аппарата с полезной нагрузкой после испытаний представлено на рис. 8.

Рис. 7. Проведение испытаний на базе ООО «Спутникс»
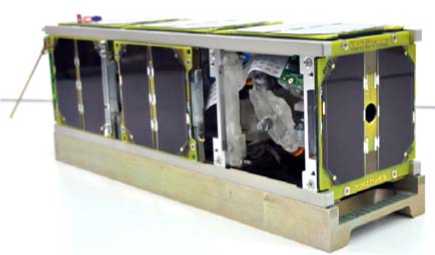
Рис. 8. МКА SXC3-2110 VOENMEH перед запуском
Fig. 7. Conducting tests on the basis of SPUTNIX LLC
Fig. 8. SXC3-2110 VOENMEH spacecraft before launch
Связь с аппаратом
После установления двусторонней связи с космическим аппаратом через наземную станцию Сибирского государственного университета имени М. Ф. Решетнева начался процесс работы с полезными нагрузками [12].
Космический аппарат связан с землей УКВ радиолинией на частоте 436 МГц со скоростью 2400 бод. Используется протокол USP (Unified Sputnix Protocol) c упреждающей коррекцией ошибок (FEC) и помехоустойчивым кодированием Рида – Соломона, отвечающий требованиям CCSDS 131.0-B-3 в отношении синхронизации и передачи телеметрических данных [13]. Бортовой приемопередатчик служит мостом между наземной станцией и внутренней CAN-шиной аппарата. Земля также является частью CAN-шины, для чего на управляющем компьютере запускается UniCAN сервер, который взаимодействует с приемопередатчиком и специализированными программами HCCA (Houston Control Center Application) и Houston Telnet. HCCA служит для просмотра телеметрических данных с аппарата и выдачи управляющих воздействий на узлы платформы КА. При помощи Houston Telnet осуществляется связь с БЦВМ на базе Raspberry Pi CM3, к которой подключены модули полезной нагрузки. В пакете данных регулярной телеметрии содержится информация, которая позволяет быстро оценить состояние космического аппарата (табл. 5). По запросу с Земли может быть передана дополнительная информация, а также может быть включен режим telnet доступа к БЦВМ [14]. В режиме Telnet доступа осуществляется управление БЦВМ путем передачи данных текстовой консоли OC БЦВМ внутри CAN кадра на УКВ приемопередатчик и обратно. В этом режиме доступна работа с периферийными устройствами, такими как контроллер полезных нагрузок и бортовая камера. Получение файлов изображений и иных результатов экспериментов из памяти БЦВМ также осуществляется через Telnet доступ. Передача изображений и иных больших файлов ведется при помощи разделения их на небольшие части с использованием архиватора tar и их последовательной передачи.
Таблица 5
Данные регулярной телеметрии
|
Параметр |
Единица измерения |
Пример данных с КА |
|
Напряжение СБ1 |
мВ |
13 |
|
Напряжение СБ2 |
мВ |
7 |
|
Напряжение СБ3 |
мВ |
11 |
|
Ток СБ1 |
мА |
1 |
|
Ток СБ2 |
мА |
2 |
|
Ток СБ3 |
мА |
0 |
|
Ток АКБ |
мА |
–472 |
|
Ток канал 1 |
мА |
475 |
|
Ток канал 2 |
мА |
29 |
|
Ток канал 3 |
мА |
0 |
|
Ток канал 4 |
мА |
0 |
|
Температура АКБ1 |
градус Цельсия |
–2 |
|
Температура АКБ2 |
градус Цельсия |
–2 |
|
Температура АКБ3 |
градус Цельсия |
–2 |
|
Температура АКБ4 |
градус Цельсия |
–2 |
|
Флаги состояния |
– |
Низкая T батарей |
|
Напряжение АКБ |
мВ |
7736 |
|
Номер пакета ТЛМ |
– |
1890 |
|
Время по бортовым часам |
дд.мм.гггг чч:мм:cc |
10.01.2023 15:59:31 |
|
Кол-во сбросов СЭП |
– |
223 |
|
Флаги СЭП |
– |
4 |
|
Температура УМ |
градус Цельсия |
4 |
|
Температура радио |
градус Цельсия |
3 |
|
Уровень сигнала с Земли |
дБм |
104 |
|
Уровень сигнала в покое |
дБм |
131 |
|
Прямая мощность передачи |
дБм |
32 |
|
Отраженная мощность |
дБм |
10 |
|
Кол-во сбросов УКВ |
– |
130 |
|
Время на УКВ |
дд.мм.гггг чч:мм:cc |
10.01.2023 15:59:32 |
|
Время с последнего сброса |
мс |
18951 |
|
Ток потребления УКВ |
мА |
29 |
|
Напряжение УКВ |
мВ |
7735 |
Заключение
Была разработана и протестирована ПН с программным обеспечением для ее системы управления. Созданная полезная нагрузка протестирована на вибростенде на ударные нагрузки и прошла термовакуумные испытания, после чего была доработана и успешно испытана. После чего ПН интегрирована в существующий программно-аппаратный комплекс «ОрбиКрафт Про» с учетом всех требований оператора запусков. Космический аппарат запущен вместе с другими спутниками на ракетоносителе Союз 2.1б 9 августа 2022 г. с космодрома Байконур [15; 16]. Установлена двухсторонняя связь со спутником Cyclops. По расчетам спутник должен проработать на орбите в течение года, за который планируется привлечь школьников и студентов для выполнения лабораторных работ и мастер классов, провести комплексное тестирование и исследование в течение срока службы аппарата разрабатываемых модулей, а также сделать вывод для целесообразности применения предлагаемых технических решений для интеграции в крупногабаритные космические аппараты и комплексы. Сейчас идет активная работа со спутником через центр управления полётом и написание методических указаний для проведения космических экспериментов.
Список литературы Разработка полезной нагрузки спутника Cyclops формата Cubesat
- Nanosats Database [Электронный ресурс]. URL: https://www.nanosats.eu (дата обращения: 10.01.2023).
- CDS. CubeSat Design Specification. Rev. 14.1 California Polytechnic State University, 2022.
- Poghosyan A. CubeSat evolution: Analyzing CubeSat capabilities for conducting science missions / A. Poghosyan, A. Golkar // Progress in Aerospace Sciences. 2017. Vol. 88. P. 59-83. Doi: 10.1016/j.paerosci.2016.11.002.
- Хохлов А. В. Образовательный космический проект space-П // Пилотируемые полеты в космос: материалы XIV Междунар. науч.-практ. конф. Звездный городок, 17-19 ноября 2021 г. / Гос. корп. по космич. деят-ти «Роскосмос»; Науч.-исслед. испытат. центр подготовки космонавтов им. Ю. А. Гагарина. Звездный городок, 2021. С. 384-386.
- Конструктор спутника «ОрбиКрафт» [Электронный ресурс]. URL: http://www.orbicraft. sputnix.ru/doku.php (дата обращения: 10.01.2023).
- Симонов В. Л. Применение разработки наноспутников кубсат (Cubesat) в учебном процессе / // Современные информационные технологии в образовании, науке и промышленности: сб. тр. XXI Междунар. конф. М.: Экон-Информ, 2022. С. 81-84.
- Перспективы применения комбинированного накопителя электроэнергии космического применения / А. И. Тишков, Ю. В. Коноплев, А. А. Юев и др. // Сибирский аэрокосмический журнал. 2022. Т. 23, № 1. С. 105-115. Doi: 10.31772/2712-8970-2022-23-1-105-115.
- A Survey on CubeSat Missions and Their Antenna Designs / L. Sining, T. Panagiotis, R. Raad et al. // Electronics. 2022. No. 11. P. 1-46. Doi: 10.3390/electronics11132021.
- Егоров, О. Д. Мехатронный подход при проектировании интегрированных мехатронных модулей // Вестник МГТУ «Станкин». 2018. № 1(44). С. 101-105.
- Open source implementation of ECSS CAN bus protocol for CubeSats / Scholz Artur, Hsiao Tian-Hao, Juang Jer-Nan, Cherciu Claudiu // Advances in Space Research. 2017. No. 62. Doi: 10.1016/j.asr.2017.10.015.
- БГТУ «Военмех» им. Д. Ф. Устинова завершил разработку полезных нагрузок для малых космических аппаратов CubeSat [Электронный ресурс]. URL: https://www.voenmeh.ru/ news/science/cubesat-development (дата обращения: 10.01.2023).
- Студенческий центр управления полетами [Электронный ресурс]. URL: https://sat. sibsau.ru/ (дата обращения: 10.01.2023).
- TM Synchronization and Channel Coding - CCSDS [Электронный ресурс]. URL: https://public.ccsds.org/Pubs/131x0b4.pdf (дата обращения: 10.01.2023).
- Научно-образовательный космический эксперимент на спутниках «СириусСат-1, -2» / В. В. Богомолов, А. В. Богомолов, Ю. Н. Дементьев и др. // Вестник Московского ун-та. Серия 3: Физика. Астрономия. 2020. № 6. С. 125-134. Doi: 10.3103/S0027134920060077.
- SPUTNIX - For radio amateurs [Электронный ресурс]. URL: https://sputnix.ru/en/satellites-sputnix/for-radioamateurs (дата обращения: 10.01.2023).
- Военмеховский спутник в космосе [Электронный ресурс]. URL: https://www.voenmeh.ru/ news/science/cubesat (дата обращения: 10.01.2023).
