Разработка проекта навигационного космического аппарата на геостационарной орбите

Автор: Звонарь В.Д., Чеботарев В.Е., Ильин М.А.
Журнал: Космические аппараты и технологии.
Рубрика: Космонавтика
Статья в выпуске: 2 (8), 2014 года.
Бесплатный доступ
Обоснованы требования к космическому аппарату (КА) как к составной части функционального дополнения системы ГЛОНАСС. Проведен анализ возможности применения заимствованных бортовых систем с базового КА «Глонасс-К» и оценен объем их доработок с использованием метода подобия по критерию - минимизация объема доработок составных частей базового КА и его конструктивно-компоновочной схемы. Определен проектно-конструкторский облик КА функционального дополнения системы ГЛОНАСС, проведены расчеты бюджета масс, габаритных размеров, моментно-центровочных характеристик.
Навигационный ка, геостационарная орбита, система глонасс, базовый ка, функциональное дополнение
Короткий адрес: https://sciup.org/14117320
IDR: 14117320 | УДК: 629.783:527
Development of the draft of navigation satellite on geostationary orbit
Requirments to the spacecraft, as an integral part of the GLONASS system was substantiated. The analysis of the possibility of using borrowed onboard systems with basic satellite "Glonass-K" was done and the extent of their modifications using the similarity by minimization of rework parts of spacecraft and its basic design-layout scheme was assessed. Design shape GLONASS was defined, the calculations of the budget of the masses, dimensions, moment-centering characteristics was done.
Текст научной статьи Разработка проекта навигационного космического аппарата на геостационарной орбите
-
1. Поддержание системы ГЛОНАСС с гарантированными характеристиками навигационного поля на конкурентоспособном уровне.
-
2. Развитие системы ГЛОНАСС в направлении улучшения ее тактико-технических характеристик с целью обеспечения паритета с зарубежными системами и обеспечения ли-
- Havko-
- ■ ГРАДА
-
3. Обеспечение использования системы ГЛОНАСС как на территории Российской Федерации, так и за рубежом.
дирующих позиций Российской Федерации в области спутниковой навигации.
Модернизация орбитальной группировки (ОГ) системы ГЛОНАСС определяется необходимостью обеспечения на конкурентоспособном уровне характеристик точности, доступности и устойчивости навигации различных потребителей системы ГЛОНАСС и существенным влиянием на эти характеристики состава и структуры ОГ.
Обеспечение наилучшей точности и доступности при сложных условиях навигации (высоком уровне затенения), в том числе компенсации зон ухудшения точности, возможно следующими путями [2; 3; 4]:
-
1) увеличением количества космических аппаратов в штатной орбитальной группировке до 27–30;
-
2) введением функционального дополнения с КА на высоких (геостационарной, геосинхронных, эллиптических) орбитах.
Целью данных исследований является разработка проекта космического аппарата, используемого в функциональном дополнении к системе ГЛОНАСС (КА-ФД).
Для достижения поставленной цели определены следующие задачи [4; 5]:
-
- обоснование требований к космическому аппарату функционального дополнения (КА-ФД) и выбор базовой космической платформы;
-
- определение объема доработок базовой космической платформы;
-
- определение проектного облика КА-ФД.
Обоснование требований к космическому аппарату функционального дополнения и выбор базовой космической платформы
Спутники системы ГЛОНАСС излучают навигационные сигналы в трех частотных диапазонах (L1, L2 и L3). При этом на спутниках первого поколения применяется частотное разделение навигационных сигналов, а на последующих – частотное и кодовое [3].
Для навигационном КА-ФД предложено использовать кодовое разделение, которое позволяет обеспечить потребителя навигационным сигналом для решения навигационной задачи с более высокими точностными харак- теристиками. На нем также устанавливается бортовое синхронизирующее устройство (БСУ), заимствованное с КА «Глонасс-К», имеющее высокие технические характеристики и летную квалификацию.
Эфемеридно-временное обеспечение навигационного КА функционального дополнения предлагается организовать по схеме, реализованной в системе ГЛОНАСС и использующей межспутниковые измерения дальности.
Проведенный анализ точностных характеристик радионавигационного поля совмещенной системы из 24 КА ГЛОНАСС и ОГ функционального дополнения на различных типах орбит показал, что наибольшее улучшение навигационных характеристик на территории Российской Федерации и Арктики, особенно в условиях ограниченной видимости (в городской и горной местности) и наличия двукратного покрытия территории России и Арктики, могут обеспечить региональные дополнения из четырех-шести КА на геостационарных орбитах с наклонением, отличным от нуля (геосинхронные наклонные круговые орбиты (ГСНО) с периодом, равным звездным суткам) [4].
При этом рассматривается вариант подсистемы из 4 КА, двигающихся вдоль одной наземной трассы, пересекающей экватор в точке 110° в.д (4х1 ГСНО, одиночная схема выведения), который реализует оптимальную навигацию для территории России.
Проанализированы условия эксплуатации КА-ФД, которые по сравнению с условиями на орбитах ГЛОНАСС отличаются суммарной дозой радиации, величиной напряженности магнитного поля Земли и длительностью теневых участков орбиты [2].
Согласно оценкам радиационная стойкость аппаратуры КА на орбитах ГЛОНАСС при сроке функционирования 10 лет эквивалентна стойкости КА на геосинхронной (стационарной) орбите при сроке функционирования 15 лет. Поэтому заимствование аппаратуры у разработанных навигационных КА системы ГЛОНАСС для КА-ФД возможно без повышения её радиационной стойкости.
Увеличение длительностей теневых участков необходимо учитывать при проведении расчета энергобаланса и теплового режима КА-ФД.
Навигационный КА в системе используется как радионавигационная «точка» с известными координатами, излучающая вы-
Разработка проекта навигационного космического аппарата на геостационарной орбите сокостабильный навигационный сигнал, охватывающий весь земной шар и околоземное космическое пространство. Это предъявляет специфические требования к построению спутника в целом и его составных частей [2]:
-
- навигационная антенна должна размещаться таким образом, чтобы её фазовый центр находился на минимальном расстоянии от продольной оси спутника, которая совмещается с центром масс спутника и совпадает с радиус-вектором орбиты;
-
- для БСУ должны быть созданы комфортные условия эксплуатации (термостабилизация с точностью лучше 1 °С) и обеспечиваться экранирование от воздействия магнитных полей;
-
- минимизация действия непрогнозируемых сил негравитационной природы (световое давление, реактивные силы и т.д.).
Поэтому КА-ФД должен быть подобен КА системы ГЛОНАСС, удовлетворяющим всем предъявляемым к навигационным КА требованиям. Наиболее подходящим по выполняемым задачам и типоразмеру (масса, габариты, энергопотребление) для КА-ФД является навигационный КА «Глонасс-К», который предлагается использовать в качестве базового. На основании вышеизложенного определен типовой состав КА-ФД: бортовой информационно-навигационный комплекс (БИНК), бортовое синхронизирующее устройство (БСУ), оптическая ретрорефлекторная антенная система (ОРАС), бортовой комплекс управления, система ориентации и стабилизации, система коррекции, система терморегулирования, система электропитания.
Определение объема доработок базовой космической платформы
Проведем анализ возможности применения заимствованных бортовых систем с базового КА «Глонасс-К» и оценим объем их доработок с использованием метода подобия. При этом необходимо минимизировать объем доработок составных частей базового КА и его конструктивно-компоновочной схемы [5].
Бортовой информационно-навигационный комплекс должен строиться на базе БИНК-К2, у которого исключены приборы, формирующие навигационный сигнал с частотным разделением (с заменой источников питания со 100 В на 27 В с сохранением массогабаритных характеристик блоков). Бортовое синхронизирующее устройство и оптическая ретрорефлекторная антенная система заимствуются с КА «Глонасс-К» без доработок.
Орбиты ГСНО выше орбит системы ГЛОНАСС, поэтому необходимо учитывать увеличение дальности и уменьшение углового размера Земли, что обусловливает соответствующее уменьшение ширины диаграммы направленности навигационной антенны. По результатам расчета бюджета радиолинии определено требуемое усиление навигационной антенны с узкой шириной луча, которая компенсирует увеличение дальности, а также требуемое усиление антенны межспутниковой радиолинии. Исходя из этих требований, определены геометрические и электрические характеристики этих антенн.
По результатам баллистического анализа определены требования к суммарной характеристической скорости, необходимой для приведения КА-ФД в рабочую точку и удержания его в течение всего срока эксплуатации. Выбран объем заправки бака двигательной установки и массы рабочего тела для коррекции орбиты (обеспечение приведения в рабочую точку восходящего узла орбиты за 11 суток, удержание в рабочей точке) и организации разгрузки электромаховиков системы ориентации. В качестве прототипа выбрана двигательная установка КА «Глонасс-К», в которой используется новый бак объемом 30 литров.
Задачи по управлению, контролю и баллистическому обеспечению КА-ФД решаются подобным образом, как в системе ГЛОНАСС (не требует доработки средств НКУ), что позволило заимствовать бортовой комплекс управления с КА «Глонасс-К».
Схему ориентации КА «Глонасс-К» можно применить на КА-ФД, однако необходимо учитывать особенности ее реализации. Применение электромагнитного устройства для разгрузки управляемых двигателей маховиков (УДМ) на ГСНО неэффективно из-за слабого магнитного поля Земли на этих орбитах. Проведенные расчеты позволили определить периодичность разгрузки УДМ (один раз в 9 месяцев), необходимые затраты рабочего тела двигательной установки (1 кг) и величину кинетического момента УДМ (50 Нмс).
По результатам расчета энергобаланса и теплового анализа КА подтверждена возможность применения системы электропитания КА «Глонасс-К» с сохранением характе-
Havko-
■ ГРАДА
X
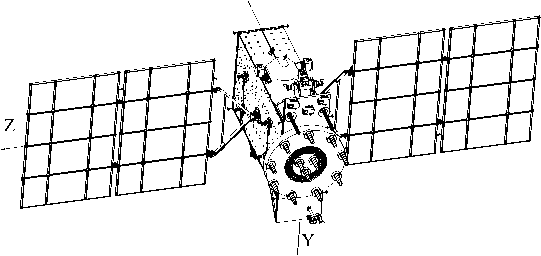
Рис. 1. Общий вид КА в рабочем положении
ристик солнечной батареи и аккумуляторов, а также подтверждена достаточность площадей радиационных поверхностей и мощностей электрообогревателей системы терморегулирования [6].
Определение проектного облика
КА-ФД
На основании оценок объема доработок бортовых систем проведены расчеты бюджета масс (табл. 1).
Полученная масса КА-ФД позволяет использовать РН «Союз-2» с РБ «Фрегат» для одиночной схемы выведения на орбиту функционирования.
Конструкторский облик КА-ФД в сравнении с базовым КА изменился (с минимальными доработками) в связи с необходимостью размещения доработанной навигационной антенны, нового бака двигательной установки. При этом обеспечено непопадание элементов
Таблица 1
Лимитная сводка масс КА
По результатам проведенных исследований разработан проект навигационного КА-ФД с характеристиками, представленными в табл. 2.
Таблица 2
Основные характеристики КА-ФД
|
Параметр |
Значение |
|
Назначение |
|
|
Срок активного существования |
Более 10 лет |
|
Орбита функционирования |
Круговая, наклонная, высотой 35 786 км, суточный период обращения |
|
Масса КА-ФД |
950 кг |
|
Энергопотребление КА-ФД |
1 434 Вт |
|
Средства выведения |
РН «Союз-2» с РБ «Фрегат» |
|
Длительность приведения КА-ФД в рабочую точку |
11 суток |
Разработка проекта навигационного космического аппарата на геостационарной орбите
Заключая статью, можно сделать следу- 2. ющие выводы.
-
1. Разработанный КА-ФД может без каких-либо ограничений функционировать на круговых наклонных орбитах с суточным 3. периодом.
-
2. Примененные при разработке проекта КА-ФД решения могут быть использованы при 4. создании КА функционального дополнения для системы ГЛОНАСС.
-
3. При проведении исследований:
-
- использован метод подобия при расчете характеристик КА-ФД на базе КА 5. «Глонасс-К»;
-
- сохранены интерфейсы КА-ФД с НКУ системы ГЛОНАСС и средствами выведения РН «Союз-2» с РБ «Фрегат»;
-
- минимизирован объем доработок состав- 6. ных частей базового КА и его конструктивно-компоновочной схемы.
Список литературы Разработка проекта навигационного космического аппарата на геостационарной орбите
- Федеральная целевая программа «Поддержание, развитие и использование системы ГЛОНАСС на 2012-2020 годы» / Федеральное космическое агентство, 2012. 255 с.
- Чеботарев В. Е., Косенко В. Е. Основы проектирования космических аппаратов информационного обеспечения: учеб. пособие / Сиб. гос. аэрокосм. ун-т. Красноярск, 2011. 488 с., [24] с.
- ГЛОНАСС. Принципы построения и функционирования / под ред. А. И. Перова, В. Н. Харисова. 4-е изд., перераб. и доп. М.: Радиотехника, 2010. 800 с.
- Исследование и подготовка предложений по созданию региональной навигационной спутниковой системы: отчет о НИР «Развитие ИСС-Э2» / В. Д. Звонарь, Р. Ф. Фаткулин, В. Е. Чеботарев [и др.]. Железногорск: ОАО ИСС, 2013. 85 с.
- Звонарь В. Д., Фаткулин Р. Ф., Ильин М. А., Тимофеев С. В. Навигационный космический аппарат на гео- стационарной орбите // Интеллект и наука: труды XIII Междунар. молодежной науч. конф. «Интеллект и наука». Железногорск, 2013. С. 19-20.
- Тимофеев С. В., Ильин М. А., Чеботарев В. Е., Звонарь В. Д., Фаткулин Р. Ф. Выбор характеристик электрообогревателей космического аппарата при наличии ограничений // Исследования наукограда. 2012. № 2 (2). С. 20-22.
