Разработка программного комплекса для испытания цифровых измерительных трансформаторов на вибростенде

Автор: Логиновский Олег Витальевич, Волович Георгий Иосифович, Топольский Дмитрий Валерианович, Топольский Никита Дмитриевич, Беляков Александр Евгеньевич
Рубрика: Информатика и вычислительная техника
Статья в выпуске: 1 т.24, 2024 года.
Бесплатный доступ
В представленной работе рассматривается программный комплекс для обеспечения мониторинга состояния следящего гидропривода с гидростатическими направляющими в составе диагностического вибростенда для цифровых трансформаторов. Срок службы цифровых измерительных трансформаторов составляет 25 лет, а межповерочный интервал - 8 лет. Для достижения таких высоких эксплуатационных характеристик необходимо проведение большого количества испытаний для подобных изделий. Одним из таких испытаний является испытание на вибростенде. Уникальность применяемого в диагностическом вибростенде гидропривода заключается в его длительном ресурсе работоспособности в эксплуатационных нагрузках (до 100 млн циклов). Такая надежность достигается за счет применения в конструкции гидропривода специальных гидростатических направляющих и требует наличия специального программного обеспечения. Создана архитектура программного комплекса для вибростенда. Для тестирования функционала пакета выполнено имитационное моделирование работы компонентов программного комплекса. Цель исследования: на основе анализа функционирования технологического оборудования и вариантов реализации управляющего программного обеспечения разработать архитектуру программного комплекса для реализации системы мониторинга состояния следящего гидропривода с гидростатическими направляющими в составе диагностического вибростенда для цифровых трансформаторов.
Цифровой измерительный трансформатор, мониторинг состояния, вибростенд, следящий гидропривод с гидростатическими направляющими, имитационное моделирование
Короткий адрес: https://sciup.org/147242619
IDR: 147242619 | УДК: 004.942 | DOI: 10.14529/ctcr240102
Development of a software package for testing digital instrument transformers on a vibration stand
The presented work examines a software package for monitoring the condition of a hydraulic servo drive with hydrostatic guides as part of a diagnostic vibration stand for digital transformers. The service life of digital instrument transformers is 25 years, and the calibration interval is 8 years. To achieve such high performance characteristics, it is necessary to conduct a large number of tests for such products. One such test is the vibration test. The uniqueness of the hydraulic drive used in the diagnostic vibration stand lies in its long service life under operational loads (up to 100 million cycles). This reliability is achieved with special hydrostatic guides in the hydraulic drive design and requires special software. The architecture of the software complex for the vibration stand has been created. To test the functionality of the package, simulation modeling of the operation of the components of the software package was performed.
Текст научной статьи Разработка программного комплекса для испытания цифровых измерительных трансформаторов на вибростенде
В связи с рас ту щ и м глоба льным интересом к разработке будущих инте ллек ту а льн ых с етей большое в н и ма н и е у д е ля е тс я н е традиционным измерительным трансформат ора м ( ИТ) . В отли ч ие от к ла сс и че ск ого тр ан с форм атора тока с магнитным сердечником, электр он н ый трансформа тор ток а не и ме е т н а с ы ще н и я, имеет небольшой объем и может генерироват ь ц и фров ой с игн а л , со о т вет ст в ующий но вейш им пр о токолам цифровой связи, таким как IEC61850 . Тр а дицио нные И Т я вл я ют ся весь м а со вер шенны м уст ройст вам и , о днако им еют по ср авнен ию с электронными (циф р о вы м и) И Т и цел ы й р я д др уг их недостатков, таких как значительные массогабар ит ные хар акт ер и ст ики, о пасно ст ь во з никн о вения пожара и взрыва. Цифровые ИТ должны прий т и на з ам ен у т р ади цио нны м эл ект р о м аг нитн ым тр ансф о р м ат о р ам , ко т о ры е нах о дя т ся в эксплуатации. Стоимость о б ору д ов а н и я и з ме ри те л ьн ых к омплексов токов и напряжения, затраты на мон та ж, тр а н с п орти р овани е и э кс п лу а та ц ию п ри и с пользовании комбинированных цифровых из ме ри те льн ых т ра н с ф орм аторов ток а и на п ря же н и я зн а чи те льн о н и же , че м п ри и с пользовании традиционных ИТ.
В и с сле д ов а н и и р а с с м а тр и вается программный комплекс для обеспечен и я мон и тори н га со стоя н и я с л е д я щ е г о ги дро п ри в од а с гидростатическими направляющими в с ос та в е д и а гн о с ти че ск ого в ибросте н д а для ци фров ых тра н сформ а тор ов . Програ ммный комплекс предназначен для у п ра в лен ия, н а л а д к и и ди а гн ос тики параметров исполнительных механизмов с ле д ящ его ги д р о п ри в од а с ги д р ос та ти ческ и ми направляющими. Целью создания программно го к омп л е к са яв ля етс я об е с п е ч е н и е а в томати зи рован ной раб оты с л е д ящ его ги д р опривода в составе диагностиче ск ого с те нд а в режи ме р е а льн о го времени. Задание частоты воздействия н а объек т и с п ыт а н ия о с уще с тв ляе тс я п у те м пе ре д а ч и энергии от насосной установки через с пеци али зиров а н н у ю п л а тформу п осре дс тв ом отра ботк и с и гн алов , п олу ча ем ы х от системы управления.


Рис. 1. Цифровой измерительный трансформатор ТРАТОН-110
Fig. 1. Digital instrument transformer TRATON-110
Объектом испытания является цифровой комбинированный трансформатор тока и напряжения (ЦКТТН). ЦКТТН разработан компанией «Челэнергоприбор» (рис. 1). Трансформатор пред- назначен для высокоточных измерений переменных тока и напряжения для классов напряжений 110–220 кВ с диапазоном измерений тока 300–2000 А, класса точности 0,2S по току и 0,2 по напряжению. Срок службы таких трансформаторов составляет не менее 25 лет, а межповерочный составляет интервал 8 лет. По этой причине подобному оборудованию помимо опытной эксплуатации [1] требуются еще и испытания на эксплуатационную надежность, для которых применяются вибростенды [2].
Применяемый в диагностическом стенде гидропривод обладает ресурсом работоспособности в эксплуатационных нагрузках до 100 млн циклов. Подобная работоспособность достигается за счет применения специальных гидростатических направляющих в конструкции гидропривода.
1. Постановка задач
Следящие гидроприводы с гидростатическими направляющими применяются в испытательных стендах – обеспечивают нагрузку на объект испытания [3–6]. На испытательных стендах изделия, конструкции и материалы проходят проверку на прочность в условиях, близких к эксплуатационным [7, 8]. До 2021 года следящий гидропривод был на 100 % импортного производства. В каждом стенде количество гидроприводов варьируется от 2 до 16, что объясняет высокую долю стоимости гидроприводов импортного изготовления относительно общей стоимости стенда, изготовленного в условиях Уральского инжинирингового центра (УрИЦ) [9]. В качестве исходного импортного образца были взяты гидроприводы японской компании Yuken [10]. Недостатком японского оборудования, находящегося в УрИЦ, является аналоговое управление, поэтому для удобства коммуникации между следящими гидроприводами и программным комплексом разрабатываются цифровые интерфейсы передачи данных по USB и Ethernet в режиме SRT (Soft-RealTime) [11].
В состав диагностического вибростенда (рис. 2) входит следящий гидропривод, включающий 3 компонента: гидроцилиндр с гидростатическими направляющими (ГП с ГСН), электрогидрав-лический усилитель мощности (ЭГУМ), датчик положения (ДП), стендовое испытательное оборудование, платформа, на которой располагается объект испытаний (ЦКТТН), а также персональный компьютер (ПК), на котором базируется программный для обеспечения мониторинга состояния гидропривода с гидростатическими направляющими.
Объект испытаний

Рис. 2. Состав диагностического вибростенда
Fig. 2. The composition of the diagnostic vibration stand
Цифровая передача данных между следящим гидроприводом и программным комплексом в режиме SRT обеспечивает оперативный мониторинг текущего состояния отдельных параметров оборудования с частотой от единиц до десятков герц. Режим SRT не позволяет в реальном времени считывать данные осциллограмм с отсчетами в микросекунды, поэтому в программный комплекс заложены алгоритмы пакетной передачи данных.
Разрабатываемый в проекте ЭГУМ включает электронный блок управления (ЭБУ) на базе микроконтроллера STM32 или его аналога со встроенной поддержкой USB и двумя Ethernet через плату-преобразователь (Ethernet в RS-485). Также в состав ЭГУМ входит высокочастотная золотниковая пара (ВЗП), соединенная с электромеханическим преобразователем (ЭМП). Протоколом взаимодействия ЭБУ с программным комплектом является Modbus RTU и Modbus TCP, удовлетворяющие режиму SRT.
Програм мн ый к ом п л е к с ос у ществляет мониторинг состояния ГП с ГСН посре дс тв ом п од клю че н и я к Д П и Э Г У М п о U SB (виртуальный COM-порт, протокол Modbus RTU) и Ethernet (протокол Modbus TCP). IP-адрес оборудования возможно задать в настро йк ах п р ог р аммы. По M o d bu s реа л из ует ся ф унк ци онал считывания и записи параметров обо р удо ва ния, а т ак же пакетный режим сбора измеренных показаний для визуализации в виде г ра ф ик ов в м о дуле . Програм ма автом а ти че ск и п ри з апуске определяет тип оборудования с подстрой к ой и н те р фе йса под него.
П ро гр а м мный к о мп л екс в к лючает модуль с графическим интерфейсом, у с т а н ав ли вае м ый на рабочее место оператор а и облачную систему хранения собранных с приб о ров да н ны х (рис. 3).
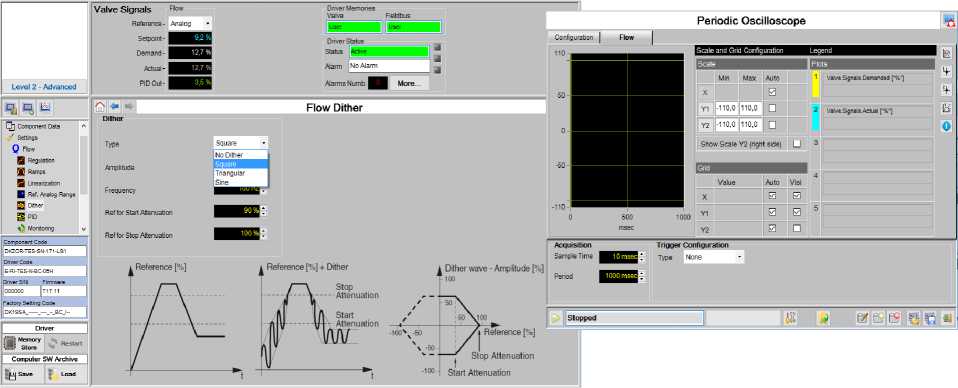
Рис. 3. Интерфейс модуля конфигурирования и мониторинга гидропривода Fig. 3. Interface of the hydraulic drive configuration and monitoring module
Програм мн ый к омп л е кс вып ол няет функции управления, наладки и диагностики параметров и спол н и т ельных ме ха н и з мов с ле дящего гидропривода с гидростатическими н а п ра в ляю щ и ми для о б е с п е ч е н и я е го а в тома т и зи ров анной работы в режиме, близком к реальн ому в ре ме н и . Про г ра мм н ы й к ом пл е кс д ол же н б ыть со вместим с компонентами гидроприводов, производством ко торы х за н и м аетс я У рИ Ц . В а ж н ы м а с пе к том программного комплекса является кроссплатфор- менн ос ть и в оз можность ра б оты на отечественных операционных системах (ОС ) . Под де р жк а м одели SaaS (software as a service) позволяет перенести с предприятия все мод у ли , к ром е мод у ля в за и мод е й стви я с Э ГУ М ( п о USB и Ethernet), в локальное или удаленное о б лак о, техн и че с ко е о б с лу жи в а н и е к отор ого м оже т выполнять поставщик программного обеспече н и я. При ра зр а б от ке программного компле к са д олж ен использоваться язык программирования в ыс ок ого у ров н я: С, С++, PASCAL, PHP, Python – определяется в процессе разработки.
2. Обоснование выбора пути решения задач проекта по созданиюпрограммного комплекса
При ре али за ц и и си с те м м они тори н га с о стояния всегда возникает проблема выбора вариантов р е а ли за ц и и п ро гра мм н ой ча сти. Проблема заключается в обоснованном выбо ре межд у с озд а н и ем проекта в ун и в е рс а л ьн ой S CADA -системе и разработкой нового проприетарного программного обеспечения (ПО) от производи теля об ору д ов а н и я .
Для об о с н ов а н н ого в ыб о ра варианта инструментального ПО необходимо р а с с мотре т ь к ри т е р ии , отн ос ящ и ес я н е то ль к о к э тапу разработки, но и то, какой пользователь с к и й оп ыт б у д е т да в ат ь в ре зул ьта те п олу чен н ое п ри к ла д ное ПО. С ра в н е н и е в а ри а н т ов применения универсальных SCADA-с и с те м и н а п и с ан ия п о лностью новой программы на языке программи ров а н и я об ще го н аз н а чен ия п ри ме н и те ль н о к за даче разработки программного комплекса для мон и торин га со стоя н и я с л е д я щ е го ги д ро п ри в од а п ри в е д е но в та б л и ц е .
Таблица
Анализ вариантов реализации программного комплекса
Table
Analysis of software package implementation options
|
№ п/п |
Критерий анализа |
Проект в универсальной SCADA |
Разработка нового собственного ПО |
Новое ПО |
|
1 |
Простота использования среды программирования |
В основном интерфейс drag-and-drop с возможностью написания сценариев |
Требуется знание языка программирования общего назначения |
Нет |
|
2 |
Кривая обучения |
Пользователи с опытом работы со SCADA могут найти его более простым в использовании |
Крутая кривая обучения для тех, кто не знаком с программированием на языке программирования общего назначения |
Нет |
|
3 |
Формат поставки |
Как правило, RunTime-компонент SCADA и прикладное ПО для запуска на нём поставляется отдельными дистрибутивами |
Поставляется одним дистрибутивом |
Да |
|
4 |
Развертывание |
Развертывание требует более сложной установки, включая установку RunTime-компонента SCADA, копирования проекта прикладной программы, настройку сетевых соединений и серверов |
Развертывание с помощью инсталлятора, а также возможна переносимая версия, не требующая установки |
Да |
|
5 |
Лицензирование |
Требуется лицензия на RunTime-компонент SCADA |
Лицензия на стороннее ПО не требуется |
Да |
|
6 |
Формат лицензирования |
Как правило, USB-ключ или привязка к аппаратной конфигурации ПК |
Дополнительных лицензий не требуется, нет никаких ограничений в использовании |
Да |
|
7 |
Соблюдение принципов SAAS-технологий |
Существуют клиент-серверные SCADA, при этом, как правило, предполагается размещение клиента и сервера на разных компьютерах |
Отдельную программу можно сделать по клиент-серверной архитектуре. Например, таким образом, чтобы сервером выступал сам ЭГУМ |
Да |
|
8 |
Гибкость |
Ограниченные возможности настройки и управления из-за предварительно созданного пользовательского интерфейса с фиксированной функциональностью |
Обеспечивает максимальную гибкость в плане настройки и возможностей управления |
Да |
|
9 |
Обработка высокочастотных сигналов |
Штатно не поддерживается, требуется написание дополнительного компонента |
Высокая гибкость в реализации, поскольку есть доступ к низкоуровневым функциям системы |
Да |
|
10 |
Совместимость с аппаратным обеспечением |
Не поддерживает USB. Интерфейс USB для сервисной настройки ЭГУМ предпочтительнее, чем RS-485, как более современный и доступный на ПК |
Поддерживает USB |
Да |
|
11 |
Самодиагностика |
Частичная, для полного соответствия требованиям нужно разрабатывать дополнительные компоненты |
Высокая гибкость в реализации, можно полностью выполнить требования |
Да |
Окончание таблицы Table (end)
|
№ п/п |
Критерий анализа |
Проект в универсальной SCADA |
Разработка нового собственного ПО |
Новое ПО |
|
12 |
Совместимость с ОС и другим ПО |
Низкая. Прикладная программа получается привязанной к конкретной версии SCADA, которая, в свою очередь, выпускается под конкретную версию ОС. Также нередки случаи конфликта SCADA разных производителей |
Возможность сделать кросс-платформенное ПО с минимумом зависимостей и конфликтов |
Да |
|
13 |
Используемые языки программирования |
В распространённых и надёжных SCADA не поддерживается ни один из перечисленных в требованиях к разработке |
Высокая гибкость в реализации, можно полностью выполнить требования |
Да |
|
14 |
Реализация аналогичных систем |
Нет примеров на рынке следящих приводов |
Производители следящих приводов используют данный подход |
Да |
|
15 |
Защита от копирования и информационная безопасность |
Низкая, поскольку имеется необходимость передавать пользователю файлы из проекта прикладной программы |
Высокая в силу того, что итоговая программа может быть скомпилирована и зашифрована |
Да |
|
16 |
Применимость для пусконаладочных работ |
Низкая, так как высока сложность установки и подключения, а также вероятны конфликты с другими SCADA, установленными на инженерной станции |
Зависит от реализации. У большинства аналогов – хорошая применимость в полевых условиях работы |
Да |
Результаты проведенного анализа указывают на преимущества создания нового проприетарного ПО при программной реализации программного комплекса для мониторинга состояния следящего гидропривода. В соответствии с выбором данного варианта реализации программного комплекса вытекают нижеприведенные решения по определению технических требований к средствам создания ПО.
Кроссплатформенность модуля сбора данных, его локальная установка на компьютер, непосредственно подключенный к ЭГУМ, достаточная для работы SRT производительность, простота установки накладывают ограничения на выбор технологий разработки ПО и, как следствие, архитектуру программного комплекса.
Собранные программным модулем данные хранятся на сервере (облаке) в реляционной базе данных (БД). Поддерживается автономная работа модуля с ранее сохраненными данными без подключения к оборудованию. Также в БД сохраняются журналы событий (лог-файлы) работы программы и журналы событий программных и аппаратных ошибок с возможностью просмотра из программы. Данные осциллограмм в виде массива точек для экономии ресурсов и места в БД хранятся в BLOB-полях.
Дистрибутив программного комплекса получает уникальный идентификационный номер. Разрабатываемый генератор номеров может осуществлять привязку номера к уникальным аппаратным параметрам оборудования (например, микроконтроллер ЭГУМ).
Поддерживаемые ОС программного модуля и серверной системы управления базами данных: Windows 10 и выше, Linux Debian 10 и выше, Astra Linux 1.7.3 и выше.
Система управления базами данных: PostgreSQL 15. Данная СУБД характеризуется высокой скоростью работы, поддержкой разнообразных видов индексов, репликации и JSON. Также в сетевую часть комплекса можно заложить горизонтальное масштабирование по собранным данным, не имеющим ограничения ссылочной целостности. Зачастую именно БД – узкое место производительности системы, поэтому масштабирование решает эту проблему.
Язык разработки: C#, платформа .NET 7 [12]. Среда разработки: JetBrains Rider, основная библиотека графических компонент: Avalonia UI [13], фреймворк GUI – Model-View-ViewModel [14].
Дополнительные программные библиотеки, такие как Modbus [15], графопостроитель, разрабатываются частично самостоятельно в рамках программного комплекса, элементы библиотек берутся из свободных источников (репозиториев) с открытым исходным кодом.
Всё программное обеспечение, необходимое для функционирования программного комплекса, – свободное.
Инсталлятор комплекса устанавливает все необходимое ПО со всеми зависимостями. Установленный на компьютер оператора гидропривода программный модуль не должен конфликтовать с другим установленным программным обеспечением.
3. Имитационное моделирование взаимодействия программного комплексас компонентами вибростенда
Проверка адекватности взаимодействия разрабатываемого программного комплекса с компонентами следящего гидропривода выполнена путем проведения имитационного моделирования. Для этих целей разработан и протестирован программный модуль взаимодействия с ЭБУ, а также была разработана плата-имитатор ЭБУ с микроконтроллером STM32 [16], подключенная по USB (виртуальный COM-порт) к компьютеру (рис. 4).
Адресное пространство ЭБУ включает 65 535 16-битных регистров Modbus. Старшая половина адресов с 32 768 до 65 535 отводится на буфер осциллограммы, содержащей точки графика с микросекундными интервалами измерений, считывание происходит полным диапазоном. Доступ к другим параметрам осуществляется через отдельные регистры.
Целью имитационного моделирования являлась оценка скорости считывания и записи отдельных параметров, а также пакетный режим считывания точек графиков, характеризующих состояние следящего гидропривода с гидростатическими направляющими. Плата реализует вычисление биквадратного фильтра. При моделировании были задействованы функции 3 (Read Multiple Registers) и 6 (Write Single Register).
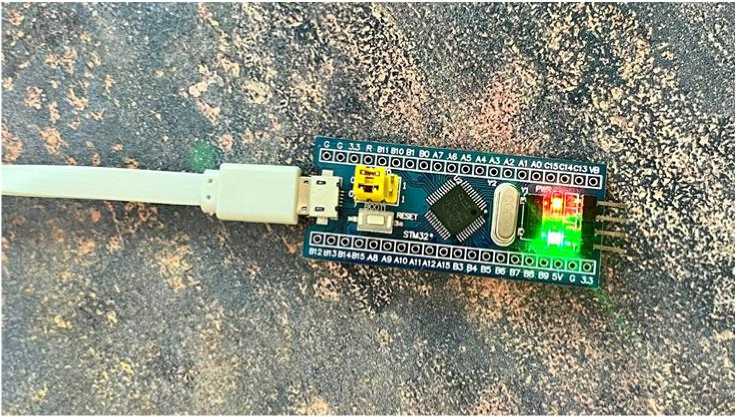
Рис. 4. Плата-имитатор ЭБУ
Fig. 4. Electronic control unit signal simulator
Modbus-регистры доступны для чтения и записи по адресам, начиная с нулевого:
-
• регистры с 0-го по 5-й содержат коэффициенты числителя (a0, a1, a2) и знаменателя (b0, b1, b2) биквадратного фильтра, умноженные на 10000 с округлением до целого 16-битного значения;
-
• регистры 6, 7 содержат начальные значения двух регистров задержки фильтра;
-
• регистр 8 содержит значение на входе фильтра.
При записи любого из этих регистров микроконтроллер пересчитывает переходный процесс на выходе фильтра и записывает его по адресам 10–124 (рис. 5).
|^3 File Edit Connection Setup Functions Display View Window Help _ s x
□ OS й О X I □ I ® a I JT I 05 06 15 16 17 22 23 | TC @ ^ ^
Tx=151; Err= 0: ID = 1: F = 03: SR = Sms
|
Alias |
00000 |
Alias |
00020 |
Alias |
00040 |
Alias |
00060 |
Alias |
00080 |
Alias |
00100 |
Alias |
00120 |
|
|
0 |
A0 |
10000 |
-14939 |
-1498 |
185 |
79 |
8 |
0 |
||||||
|
1 |
Al |
-10000 |
-8207 |
899 |
414 |
47 |
-4 |
-2 |
||||||
|
2 |
A2 |
0 |
4341 |
2158 |
258 |
-19 |
-11 |
-1 |
||||||
|
3 |
B0 |
10000 |
11235 |
1402 |
-89 |
-59 |
-7 |
0 |
||||||
|
4 |
Bl |
-10000 |
7589 |
-410 |
-306 |
-43 |
1 |
1 |
||||||
|
5 |
B2 |
8400 |
-1848 |
-1588 |
-231 |
6 |
8 |
|||||||
|
6 |
Z1 |
0 |
-8223 |
-1244 |
25 |
42 |
6 |
|||||||
|
7 |
Z2 |
0 |
-6670 |
90 |
220 |
37 |
0 |
|||||||
|
8 |
INPUT |
30000 |
237 |
1135 |
198 |
1 |
-5 |
|||||||
|
9 |
0 |
5840 |
1059 |
13 |
-29 |
-5 |
||||||||
|
10 |
30000 |
5641 |
105 |
-153 |
-31 |
0 |
||||||||
|
11 |
30000 |
735 |
-784 |
-164 |
-5 |
3 |
||||||||
|
12 |
4800 |
-4003 |
-873 |
-35 |
20 |
4 |
||||||||
|
13 |
-20400 |
-4621 |
-214 |
102 |
25 |
1 |
||||||||
|
14 |
-24432 |
-1258 |
519 |
132 |
8 |
-2 |
||||||||
|
15 |
-7296 |
2623 |
699 |
46 |
-12 |
-3 |
||||||||
|
16 |
13226 |
3680 |
263 |
-64 |
-19 |
-1 |
||||||||
|
17 |
19355 |
1476 |
-324 |
-103 |
-8 |
1 |
||||||||
|
18 |
8244 |
-1614 |
-545 |
-49 |
7 |
2 |
||||||||
|
19 |
-8013 |
-2855 |
-272 |
37 |
15 |
1 |
|For Help, press F1, Port 11:600-8-E-1
Рис. 5. Карта регистров Fig. 5. Map of registers
При ме р у с та н ов ленн ы х п ара ме тров , сод ерж а щ и хс я в регистрах с 0-го по 8-й: a0 = 1,00; a1 = –1,00; a2 = 0, 00;
b0 = 1,00; b1 = –1,00; b2 = 0, 84;
z1 = 0,00; z2 = 0,00; in = 3, 00.
Считанные данные из р е г и с тров с 10 -го по 124-й представлены на рис. 6.
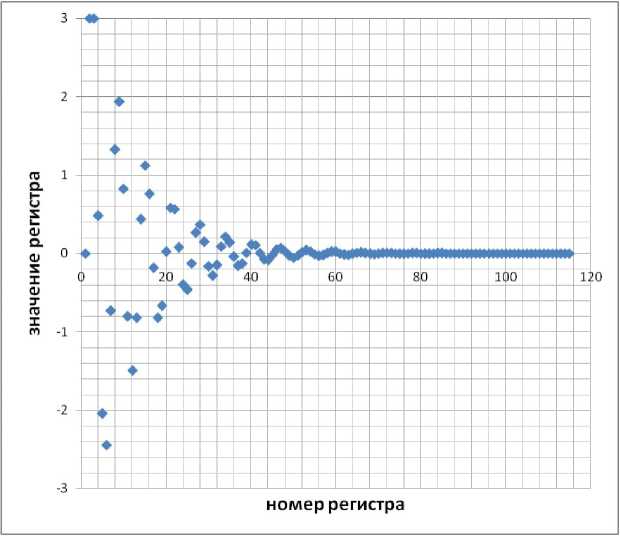
Рис. 6. Считанные данные из регистров 10–124
Fig. 6. Read data from registers number 10 to 124
Времен ные к онф и гу р а ц и он ные параметры: скорость передачи данн ы х п о c om -порту
115 200 би т/ с ; п а у з а п е ред оп е ра ц ие й чте н и я 20 мс, пауза перед операцией записи 50 мс.
Исходный код на C# алгоритма ввода-вывода данных имитатора (рис. 7).
client.PortName = "COM3";
client.SaudRate = 115200;
client.ReadPause = 20;
client.WritePause = 50;
const double input = 3;
client.WriteSingleRegister(lj 8, (ushort) (short) (input*10000));
double[] parms = client.ReadHoldingRegisters(l, 0, 9) .Select(p => ((short) p)/10000.0) ,ToArray();
Console .Writel_ine($"a0={parms[0],5:F2}; al={parms[1],5:F2}; a2={parms[2],5:F2}") Console.WriteLine($"b0={parms[3],5:F2}; bl={parms[4],5: F2}; b2={parms[5],5:F2}") Console.WriteLine($"zl={parms[6],5:F2}; z2={parms[7],5: F2}; in={parms[8],5:F2}")
double[] values = client.ReadHoldingRegisters(l, 9, 115) .Select(p => ((short) p)/10000.0) .ToArray();
Рис. 7. Алгоритм ввода-вывода данных имитатора
Fig. 7. Data input-output algorithm of the Electronic control unit signal simulator
Время работы программы, включающей алгоритмы записи одного параметра, пересчета фильтра, считывания параметров и графика, составило 0,14 с. Время только считывания пакета координат – 0,04 с, примерно равно времени считывания 9 регистров. Пакет координат можно считывать 30 раз в секунду. Это в полной мере отвечает требованиям к разработке программного комплекса для обеспечения мониторинга состояния следящего гидропривода с гидростатическими направляющими.
Выводы
На основе анализа функционирования технологического оборудования и управляющего программного обеспечения создана архитектура программного комплекса для следящего гидропривода с гидростатическими направляющими в составе вибростендов для испытания цифровых трансформаторов. Разработанная архитектура программного комплекса ориентирована на обеспечение автоматизированной работы следящих гидроприводов, позволяет конфигурировать все необходимые параметры оборудования, осуществлять мониторинг состояния оборудования по цифровым протоколам передачи данных, централизованно сохранять и тиражировать настройки гидроприводов под конкретные условия эксплуатации на предприятиях.
Анализ вариантов реализации показал, что применение SCADA-систем упрощает процесс разработки типовых проектов диспетчерского управления и сбора данных и мониторинга состояния, но при этом имеет повышенную сложность на этапе развертывания и эксплуатации. Функционал ни одной из распространённых и надёжных SCADA-систем не покрывает всех требований к данному проекту. В частности, это относится к подключению по USB и обработке высокочастотных сигналов, предусмотренных требованиями к разработке. Помимо этого, при применении универсальных SCADA-систем конечному пользователю необходимо приобретать лицензию на RunTime-компонент SCADA. Таким образом, качественное и полностью соответствующее требуемому функционалу прикладное ПО реализовать на основе универсальных SCADA-систем не представляется возможным либо это потребует разработки дополнительных компонентов на языке программирования общего назначения.
Тестирование функционала пакета, выполненное методом имитационного моделирования на основе создания платы-имитатора ЭБУ, показало надежное взаимодействие компонентов программного комплекса с оборудованием вибростенда. Временные задержки на обмен и обработку технологической информации мониторинга состояния соответствуют требованиям к разработке программного комплекса.
Список литературы Разработка программного комплекса для испытания цифровых измерительных трансформаторов на вибростенде
- Volovich G.I., Kirpichnikova I.M., Topolskiy D.V. Experimental operation of the adaptive electronic instrument transformer of current and voltage // 2017 International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM). St. Petersburg, Russia, 2017. P. 1–5. DOI: 10.1109/ICIEAM.2017.8076216
- A New Vibration Testing Platform for Electronic Current Transformers / Z. Li et al. // IEEE Transactions on Instrumentation and Measurement. 2019. Vol. 68, no. 3. P. 704–712. DOI: 10.1109/TIM.2018.2854939
- Анализ перспективы развития мехатронных систем на примере электрогидроцилиндра повышенной эффективности / А.Е. Карамгужинова, В.Н. Кузнецова, В.В. Савинкин, Д.А. Коптяев // Вестник СибАДИ. 2020. № 17 (1). С. 22–31. DOI: 10.26518/2071-7296-2020-17-1-22-31
- Пашков Е.В., Крамарь В.А., Кабанов А.А. Следящие приводы промышленного технологического оборудования: учеб. пособие. СПб.: Лань, 2022. 368 с.
- Проектирование автоматизированных станков и комплексов: учеб.: в 2 т. / [В.М. Утенков и др.]; под ред. П.М. Чернянского. 2-е изд., испр. М.: Изд-во МГТУ им. Н.Э. Баумана, 2014. Т. 1. 331 с.
- Свешников В.К. Станочные гидроприводы: справ. М.: Машиностроение, 2008. 640 с.
- Зеленко О.В., Егорычев А.И. Программная реализация протокола ModBus на основе электронного модуля ввода-вывода // Вестник Казанского технологического университета. 2014. № 6. URL: https://cyberleninka.ru/article/n/programmnaya-realizatsiya-protokola-modbus-na-osnoveelektronnogo-modulya-vvoda-vyvoda (дата обращения: 16.12.2023).
- Ефимова Ю.В. Автоматизированная система визуализации с передачей параметров по протоколу MODBUS // Форум молодых ученых. 2018. № 12-2 (28). С. 512–521.
- Проект ЮУрГУ по производству следящих гидроприводов получил федеральную поддержку // Южно-Уральский государственный университет: сайт. URL: https://www.susu.ru/ru/news/2023/01/11/proekt-po-proizvodstvu-sledyashchih-gidroprivodov-poluchil-federalnuyu-podderzhku (дата обращения: 16.12.2023).
- Servo Valve Design for Faster Response in Motion Systems and also Low Contamination Susceptibility // Yuken Europe: website. URL: https://yukeneurope.com/whitepaper-servo-valve-design-for-fasterresponse-in-motion-systems-and-also-low-contamination-susceptibility (дата обращения: 16.12.2023).
- PROFINET – Real-time communication in the field // Siemens: website. URL: https://www.siemens.com/global/en/products/automation/industrial-communication/profinet.html (дата обращения: 16.12.2023).
- Rider: The Cross-Platform .NET IDE from JetBrains // JetBrains: website. URL: https://www.jetbrains.com/rider/ (дата обращения: 16.12.2023).
- Avalonia UI // Avalonia. URL: https://avaloniaui.net/ (дата обращения: 16.12.2023).
- Model-View-ViewModel // Microsoft Learn: website. URL: https://learn.microsoft.com/en-us/dotnet/architecture/maui/mvvm (дата обращения: 16.12.2023).
- Just about Modbus RTU with detailed description and examples // IPC2U: website. URL: https://ipc2u.ru/articles/prostye-resheniya/modbus-rtu/ (дата обращения: 16.12.2023).
- STM32 32-bit Arm Cortex MCUs // ST: website. URL: https://www.st.com/en/microcontrollersmicroprocessors/stm32-32-bit-arm-cortex-mcus.html (дата обращения: 16.12.2023).
