Разработка синхронной реактивной машины с высокими удельными показателями для промышленных электроприводов

Автор: Савостеенко Никита Вадимович, Максимов Никита Максимович, Благов Михаил Сергеевич, Посаднов Александр Евгеньевич
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электротехнические комплексы и системы
Статья в выпуске: 4 т.22, 2022 года.
Бесплатный доступ
Использование энергоэффективного электропривода затрагивает различные сферы производства. Актуальность этого с каждым годом растет, замена старого оборудования на современное - это вопрос времени и темпа модернизации. Так, в промышленном производстве кораблестроения стоит вопрос о модернизации гребных установок путем использования электропривода с высокими удельными показателями. К данной энергетической установке предъявляются весьма жесткие условия: достаточно высокий коэффициент полезного действия и высокая мощность при сравнительно малых массогабаритных показателях. Таким образом, выбор пал на использование синхронного реактивного двигателя с использованием высокотемпературных сверхпроводников. Для поддержания сверхпроводящего состояния ВТСП элементов необходима криогенная установка. Учитывая режимы работы и эксплуатации грузовых суден и ледоколов, установка должна быть простой, а материал для охлаждения должен быть доступным. В этом случае хорошими качествами обладает жидкий азот (77 К), так как для его создания необходим только доступ к воздуху из окружающей среды. Элементы ВТСП, на которых спроектирован СРД, должны переходить в сверхпроводящее состояние при температуре кипения жидкого азота. Данная конструкция электропривода позволит не только уменьшить массогабариты гребной установки (система ГЭУ «Азипод»), но и сохранить перегрузочную способность, обеспечив надежную работу привода на всем промежутке времени и режимах эксплуатации судна.
Синхронная реактивная машина, гребной привод, сверхпроводник, энергоэффективный электропривод
Короткий адрес: https://sciup.org/147239269
IDR: 147239269 | УДК: 62-83 | DOI: 10.14529/power220407
Development of a synchronous reactive machine with high specific indicators for industrial electric drives
The use of an energy efficient electric drive affects various areas of production. The relevance is growing every year, thus replacing old equipment with modern is a matter of time and pace of modernization. So in the industrial production of shipbuilding, there is a question of modernizing propulsion plants by using an electric drive with high specific performance. Very tough conditions are imposed on this power plant: a fairly high efficiency and high power, with relatively small weight and size indicators. Thus, the choice fell on the use of a synchronous reluctance motor using high-temperature superconductors. To maintain the superconducting state of HTSC elements, a cryogenic facility is required. With the conditions of operation and operation of cargo ships and icebreakers, the installation should be simple, and the material for cooling should be available. In this case, liquid nitrogen (77 K) has good qualities, because to create it, only access to air from the environment is necessary. The HTSC elements on which the SRM is designed must pass into the superconducting state at the boiling point of liquid nitrogen. This design of the electric drive will allow not only to reduce the weight and dimensions of the propulsion unit (the Azipod power plant system), but also to maintain the overload capacity, ensuring reliable operation of the drive over the entire period of time and modes of operation of the vessel.
Текст научной статьи Разработка синхронной реактивной машины с высокими удельными показателями для промышленных электроприводов
С каждым годом спрос на энергоэффективный привод растет. Это обуславливается не только экологическими нормами, но и сложным технологическим процессом, включающим в себя модернизацию и совершенствование оборудования. Также необходимо отметить, что при использовании энергоэффективного оборудования увеличивается и производительность всего технологического процесса. Так, в работе [1] рассмотрено использование многоуровневого преобразователя частоты для обеспечения бесперебойной работы объектов, относящихся к категории критически важных. В результате выявлено повышение надежности работоспособности электромеханического преобразователя в случае выхода из строя одной фазной обмотки. Следующим примером использования энергоэффективного привода является использование синхронного реактивного двигателя с независимым возбуждением в промышленном электрическом тракторе ДЭТ-400 [2]. Выбор представленной электрической машины обусловлен особенностью конструкции. На роторе отсутствуют обмотка и постоянные магниты, что позволяет повысить в несколько раз перегрузочную способность машины. СРМНВ имеет многофазную статорную обмотку, позволяющую увеличить надежность работы двигателя в случае отказа одной из фаз. Ввиду наличия многофазной статорной обмотки снижаются пульсации электромаг- нитного момента. Таким образом, исследования и разработка энергоэффективных приводов и энергоустановок являются достаточно востребованным направлением.
Главным фактором использования энергоэф-фективого электропривода являются массогабаритные показатели. Для определения оптимальной конструкции электрического двигателя необходимо воспользоваться несколькими этапами аппарата математической статистики. Так, для примера, факторный анализ включает в себя регрессионный анализ и оценку достоверности на основании критерия Стьюдента, что позволяет объяснить влияние особенностей конструктивного исполнения электромеханических преобразователей. На базе представленного на рис. 1 объема данных можно описать зависимость номинальных параметров мощности и момента двигателя.
Электропривод в гребных установках
Главным исполнительным механизмом у любого судна является судовой движетель, служащий для движения судна с заданной скоростью. В качестве гидроэнергетической установки гребной установки используется два типа исполнения: ГЭУ «Азипод» и ГЭУ с применением винторулевой колонки. И если мощность второго вариант ГЭУ ограничена механической прочностью ввиду наличия большого количества механических передач, то вариант ГЭУ «Азипод» данной проблемы
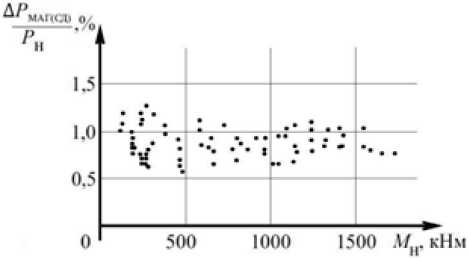
Рис. 1. Совокупность технических данных относительных магнитных потерь электрических машин в зависимости от номинального момента
Fig. 1. The totality of technical data of relative magnetic losses of electrical machines depending on the rated torque
не имеет [3]. Особенность данного ГЭУ заключается в размещении в герметичной гондоле приводного гребного электродвигателя, напрямую соединенного с гребным винтом. Таким образом, система «Азипод» позволяет обеспечить высокую манёвренность судна. Однако при необходимости увеличения мощности приводного двигателя прямопропорционально увеличивается число приводных гондол с движетелями, либо мощность самого электродвигателя. Последний вариант может привести к высоким нагрузкам на движетельный модуль судна ввиду больших нагрузок в процессе эксплуатации судна и, как следствие, к преждевременной или даже аварийной поломке модуля.
Таким образом, главная задача модернизации гребного электропривода заключается в увеличении его мощности с учетом сохранения или уменьшения массогабаритных параметров.
Выбор электродвигателя
Особенность работы гребного электродвигателя заключается в его механической характеристике. Она основывается на рабочих характеристиках, снимаемых при номинальной осадке судна и движении в спокойной воде, а также швартовной, при которой момент сопротивления винта достигает максимума. К этому добавляется частый реверс судна. Однако данный реверс резко отличается от реверса гребного двигателя.
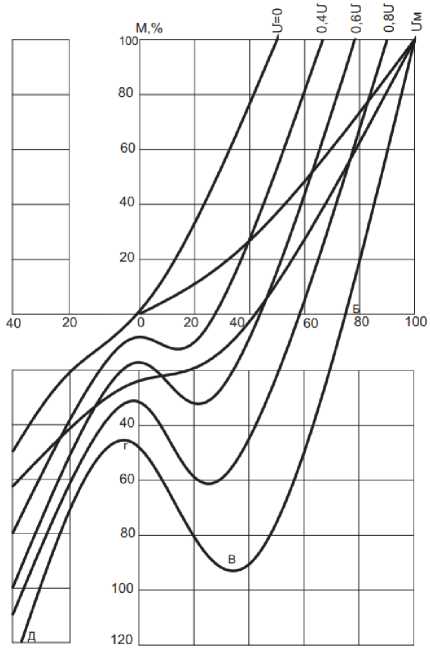
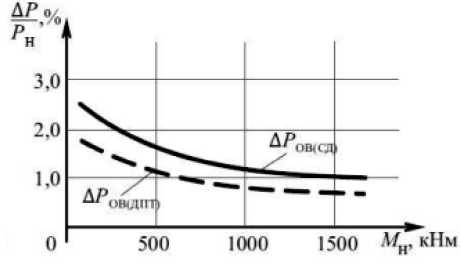
Рис. 2. Нагрузочная характеристика гребной установки Fig. 2. Load characteristics of the propulsion plant
На рис. 2 представлена нагрузочная характеристика работы гребного привода в зависимости от режима работы. Так, кривая 3 показывает: чтобы достичь уменьшения скорости судна, необходимо остановить гребной винт и удержать его в неподвижном состоянии. При этом на него воздействую силы, стремящиеся привести винт в движение (встречное течение, инерционный ход судна). В этот момент приводной двигатель должен выдерживать переменный момент на всем промежутке останова судна.
Таким образом, работа электродвигателя гребного привода считается тяжелой. В случае режима работы ледокола нагрузочная диаграмма представляет собой переменную характеристику: частый реверс, остановы, заклинивания винта. Соответственно, выбор электрического двигателя производится более тщательно – привод должен иметь высокую перегрузочную способность.
С представленными задачами эффективно может справиться синхронный реактивный двигатель. Очевидными преимуществами являются простая конструкция, отсутствие на роторе обмотки возбуждения и постоянных магнитов, что позволяет повысить надежность двигателя. Преимущества «холодного» ротора представляют собой возможность работы с моментом на валу 1 : 10, при этом сохраняя высокие динамические показатели, без обязательного охлаждения. Перегрузочная способность представленного вида двигателей выше, чем у асинхронного двигателя или двигателя постоянного тока. Также необходимо отметить простую конструкцию статора СРД. Статор представляет собой точную копию статора асинхронного двигателя, что во много раз упрощает конструкцию двигателя, а также его эксплуатацию [4].
Судить о работе синхронной реактивной машины можно из представленных ниже формул:
Vd = Ldid + L^dLD ;
^d=Lqiq+L^qLQ;
т = в
3p(Vdl q -V q i d )
.
При создании обмоткой статора магнитного поля возникает момент двигателя. Его вектор направлен так, чтобы в каждый промежуток времени сопротивление магнитного поля в роторе было минимально. Таким образом, он воздействует на ротор электродвигателя, вследствие чего возникает момент вращения. Значение момента прямо зависит от разницы продольной и поперечной индуктивности ротора – чем она больше, тем выше амплитуда момента.
Использование ВТСП-элементов
Использование энергоэффективного привода не решает в полном объеме проблему массогабаритных показателей. Этот вопрос можно решить с помощью использования электропривода, спроектированного с помощью сверхпроводниковых
Савостеенко Н.В., Максимов Н.М., Благов М.С., Посаднов А.Е.
элементов. Явным преимуществом данного двигателя является высокая выходная мощность при малых массогабаритных показателях, высокий коэффициент мощности и КПД. Недостатком является система охлаждения, необходимая для корректной работы сверхпроводников. Необходимо отметить, что для различных сверхпроводящих материалов требуется разная температура охлаждения. В случае использования электропривода на ВТСП-элементах на ледоходе исполнение криогенной установки должно быть простое, т. е. в качестве охлаждающего вещества должен выступать жидкий азот (77 К), так как для его создания не требуется дополнительных установок и резервуаров с жидким гелием, водородом или неоном. Для создания жидкого азота требуется доступ к воздуху из окружающей среды. Таким образом, при проектировании электропривода на ВТСП-элементах могут выступать материалы на основе иттриевых керамик (YBCO) и композитных висмутовых керамик (BSCCO), имеющие хорошие электромагнитные свойства при охлаждении жидким азотом [5].
Существует несколько типов конструктивного исполнения ВТСП-элементов в электродвигателе. Основными из них являются:
-
• электрические двигатели с ВТСП-элементами в обмотках статора;
-
• электрические двигатели с ВТСП-элементами в обмотках ротора.
Применение ВТСП-элементов в статорной обмотке позволит повысить токовую нагрузку, уменьшить потери в статорной обмотке и индуктивных сопротивлений, а также повысить коэффициент полезного действия машины. Первый случай исполнения электропривода неактуален, так как в синхронной реактивной машине отсутствует обмотка на роторе [6].
Таким образом, для дальнейших исследований необходимо спроектировать синхронный реактивный двигатель с использованием высокотемпературных сверхпроводников в пазах статора с охлаждением статора жидким азотом.
Моделирование электродвигателя
Создание опытной модели синхронной реактивной машины с высокотемпературными сверхпроводящими элементами необходимо для изуче- ния электромагнитных явлений, протекающих в железе, а также изучить угловые характеристики машины, дать оценку целесообразности использования ВТСП-элементов.
Исследование будет проводиться для двух систем ГЭУ:
-
– «Азипод»;
-
– винторулевая колонка.
Особенности работы каждой из ГЭУ рассмотрены выше. Из-за конструктивной особенности следует учесть, что гребной привод ГЭУ «Азипод» соединен напрямую с гребным винтом, а у ГЭУ с ВРК соединение осуществляется при помощи комплекса редукторов. Таким образом, необходимо разработать два вида машин, одна будет построена на 4 полюсах, чтобы иметь высокую номинальную скорость вращения, и вторая 8-полюсная машина, чтобы иметь сравнительно низкую частоту вращения, но при этом иметь высокий момент на валу двигателя.
Создание и расчет синхронной реактивной машины производится в программной среде математического моделирования Ansys Maxwell. Преимуществом данной программы является расчет электромагнитных процессов с помощью метода конечных элементов. Статор электрической машины выполнен, как в асинхронном электрическом двигателе. Для этого использован асинхронный двигатель типа D423-1250LC6 (см. таблицу).
Исследование СРМ будет проводиться с различными видами роторов. Как отмечалось ранее, в зависимости от конструкции и исполнения ротора зависят механические, электромеханические и угловые характеристики машины.
Задачи проведения математического проектирования и исследования математических моделей:
-
– исследование математических моделей без изменения конструкции и размеров статора, а также снятие угловых характеристик при подаче постоянного значения тока на обмотки статора;
-
– исследование проводится при различных конструкциях ротора СРМ.
Рассмотрим работу СРМ с 4-полюсным и 8-полюсным аксиальным ротором с ВТСП элементами. Сама машина и ее конструкция изображена на рис. 3. Угловые характеристики представлены на рис. 4, 5.
Параметры асинхронного двигателя D423-1250LC6 D423-1250LC6 asynchronous motor parameters
|
Параметр |
D423-1250LC6 |
|
Номинальное напряжение, В |
660 |
|
Номинальная мощность, кВт |
1250 |
|
Номинальная частота, Гц |
50 |
|
Номинальный ток, А |
1335 |
|
Номинальный момент, кНм |
12 |
|
Максимальный момент, кНм |
36 |
|
Номинальная частота вращения, об/мин |
992 |
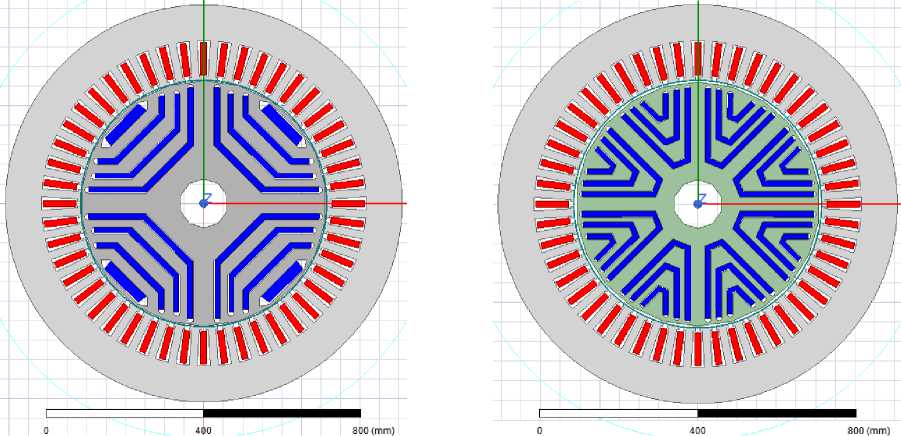
Рис. 3. СРМ с 4-полюсным и 8-полюсным аксиальным ротором с ВТСП-элементами Fig. 3. SRM with 4-pole and 8-pole axial rotor with HTS elements
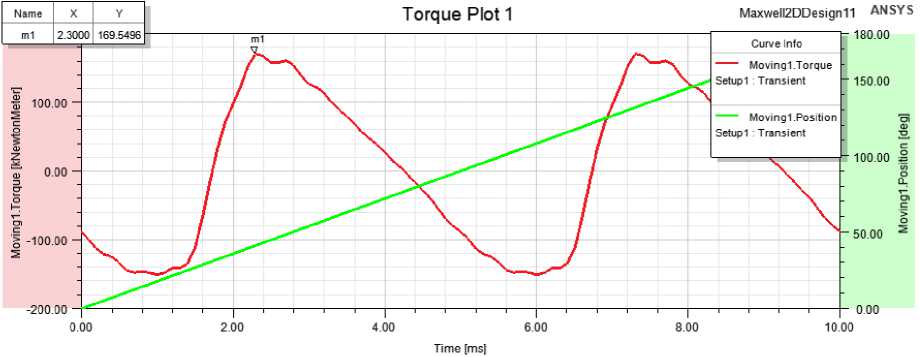
Рис. 4. Угловая характеристика машины с 4-полюсным ротором с ВТСП-элементами Fig. 4. Angular characteristic of a machine with a 4-pole explicit rotor with HTS elements
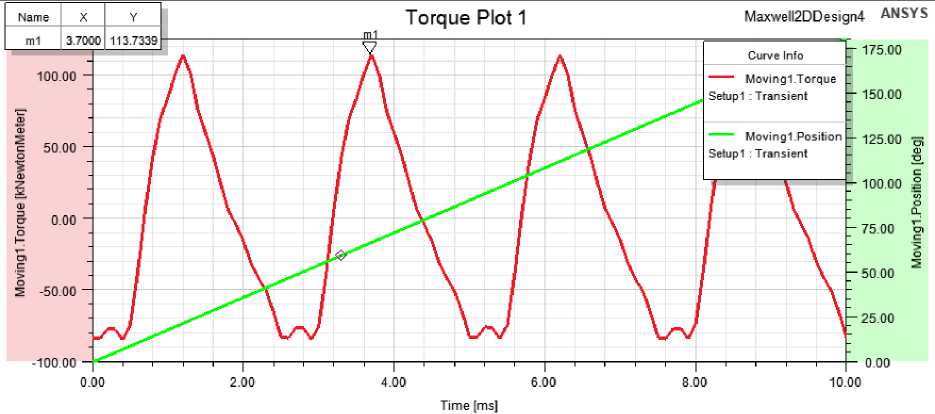
Рис. 5. Угловая характеристика машины 8-полюсным аксиальным ротором с ВТСП-элементами Fig. 5. Angular response of the machine with an 8-pole axial rotor with HTS elements
Максимальное значение развиваемого машиной момента на 40° положения ротора от начала движения вращения составляет 169,5 кНм (см. рис. 4).
Максимальное значение развиваемого машиной момента на 73° положения ротора от начала движения вращения составляет 113,7 кНм (см. рис. 5).
Заключение
В результате проведенных исследований и полученных данных сделаны следующие выводы по использованию синхронной реактивной машины на базе ВТСП-элементов.
-
• Лучшие энергетические показатели продемонстрировала синхронная реактивная машина с аксиальным ротором с высокотемпературными вставками в обоих случаях использования: в 4-полюсной и в 8-полюсной машине.
-
• Для реализации синхронной реактивной машины на базе ВТСП-элементов необходимо наличие постоянного притока охлаждающей жидкости к электроприводу. Если использовать ГЭУ системы «Азипод», появляется большая возможность уменьшить массогабаритные размеры конструкции гондолы гребного привода. Однако необходимо отметить, что при этом теряется маневренность системы в целом.
-
• Применяя в качестве ГЭУ систему на базе винторулевой колонки, можно также выиграть в случае массогабаритных показателей в сторону уменьшения пространства машинного отделения. Стоит отметить, маневренность судна сохраняется, так как ничего не ограничивает вращения винта на 360°. Однако, как говорилось выше, ГЭУ с ВТК имеют ограниченную выходную мощность ввиду наличия механического редуктора.
Список литературы Разработка синхронной реактивной машины с высокими удельными показателями для промышленных электроприводов
- Самосейко В.Ф., Гельвер Ф.А., Белоусов И.В. Перспективы использования реактивных электрических машин в электроприводе // Труды IX международной (XX Всероссийской) конференции по автоматизированному электроприводу АЭП-2016. 2016. С. 359-363.
- Горожанкин А.Н. Выбор геометрии ротора синхронной реактивной машины для электроприводов стана холодной прокатки труб // Электротехника. 2020. № 5. С. 2-7.
- Преобразователь частоты для гребного электродвигателя / Г.М. Мустафа, С.В. Волков, А.М. Ершов и др. // Электротехника. 2014. № 1. С. 46-53.
- Журавлев А.М., Григорьев М.А. Электромагнитный расчет электрических машин для объектов нефтегазового комплекса // Электротехника. 2020. № 5. С. 25-29.
- Перспективы применения сверхпроводниковых устройств на борту полностью электрического самолета с гибридной силовой установкой / К.Л. Ковалев, В.Т. Пенкин, Н.С. Иванов и др. // Электричество. 2018. № 10. С. 45-53.
- Грызлов А.А., Курнаев А.В., Григорьев М.А. Новые подходы к разработке электрических машин для современных регулируемых электроприводов переменного тока // Электротехника. 2020. № 7. С. 46-51.
