Разработка системы визуального наблюдения

Автор: Тимофеев Андрей Сергеевич, Шаранок Александр Сергеевич, Афонина Вера Александровна
Журнал: Космические аппараты и технологии.
Рубрика: Космические услуги
Статья в выпуске: 3-4 (17-18), 2016 года.
Бесплатный доступ
Необходимость визуального контроля состояния космического аппарата, а также отсутствие подобных систем на российском рынке космической техники стали причинами разработки системы визуального наблюдения, способной выполнить поставленную задачу. В основу разработки была положена модульная структура с централизованным управлением, а в качестве основного интерфейса информационно-логического взаимодействия между составными частями системы визуального наблюдения был выбран прогрессивный интерфейс SpaceWire (ECSS-E-50-12C). Выбор интерфейса SpaceWire обусловлен его техническими характеристиками, позволяющими передавать большие массивы данных за короткие промежутки времени (максимальная скорость до 400 Мбит/с) с высокой достоверностью. Модульная структура системы визуального наблюдения позволяет легко её масштабировать в зависимости от требований заказчика. Количество элементов наблюдения (блоков регистрации данных, содержащих камеры инфракрасного и видимого диапазонов) может варьироваться от 2 до 16...
Визуальное наблюдение, фотокамера, инфракрасная камера
Короткий адрес: https://sciup.org/14117383
IDR: 14117383 | УДК: 629.783
Development of visual observation system
Necessity of visual inspection of the spacecraft state and the lack of such systems in the Russian market of space technology have become reasons for the development of a visual observation system, which is able to complete the task. The basis of the development was accepted a modular structure with centralized control. Progressive interface SpaceWire (ECSS-E-50-12C) was chosen as the main interface of informational and logical interaction between the components of the visual observation system. Choosing SpaceWire interface was due to its technical characteristics, which allow transferring large amounts of data over short periods of time (maximum speed up to 400 Mbit/s) with high reliability. The modular structure of the visual observation system makes easy to scale it according to customer requirements. The number of observation elements (data recording units containing the cameras of visible and infrared ranges) can vary from 2 to 16. At the moment, as a docking interface of visual observation system and the spacecraft systems for the informational and logical exchange is selected SpaceWire (ECSS-E-50-12C), but if necessary and on customer request, it can be replaced with any other digital communication interface (for example interface by GOST P 52070-2003). This makes it easy to integrate the visual observation system into any spacecraft system with the digital interfaces of exchange.
Текст научной статьи Разработка системы визуального наблюдения
На первом этапе летных испытаний космических аппаратов (КА) различного класса важнейшей задачей является оперативный контроль состояния КА, в том числе и контроль за трансформируемыми конструкциями. В настоящий момент на российском рынке космической техники отсутствует аппаратура, способная выполнить указанную задачу.
Задача по мониторингу трансформируемых систем была поставлена в рамках создания КА «Енисей-А1». Кроме того, при создании системы визуального наблюдения заказчиком (АО «ИСС») было предложено реализовать дополнительный функционал, включающий в себя не только мони-
торинг трансформируемых систем, но и мониторинг температурного фона поверхности КА и его отдельных частей посредством фотографирования поверхности КА в инфракрасном диапазоне.
Задачи системы визуального наблюдения
Задачи, выполняемые системой визуального наблюдения включения, включают:
-
- фотографирование поверхности КА в видимом диапазоне в автоматическом режиме или по команде;
-
- фотографирование поверхности КА в инфракрасном диапазоне в автоматическом режиме или по команде;
-
- хранение снимков в памяти;
-
- передачу снимков внешним абонентам.
Структура системы визуального наблюдения
Анализ поставленных задач привел к тому, что для построения системы визуального наблюдения была выбрана модульная структура, которая включала в себя центральный моноблок (ЦМБ) и блоки регистрации данных (БРД). Структурнофункциональная схема системы визуального наблюдения приведена на рис. 1.
Выбранная схема позволяет выполнять мониторинг поверхности КА и трансформируемых 46 систем в различных точках КА, при этом со сторо ны приборов КА всё информационно-логическое взаимодействие строится через ЦМБ СВН, как с единым прибором. Такой подход позволяет избавиться от большого числа абонентов, подключаемых к информационно-логической сети КА.
Задачи и состав модулей СВН
Задачи БРД:
-
- обеспечение фотографирования в визуальном диапазоне с заданными параметрами;
-
- обеспечение фотографирования в инфракрасном диапазоне с заданными параметрами;
-
- хранение и передача снимков в ЦМБ.
Исходя из поставленных задач, в состав БРД включили:
-
1) модуль формирования изображений (МФИ), включающий в свой состав камеры видимого и инфракрасного диапазонов;
-
2) универсальная поворотная платформа (УПП), которая совместно с камерами МФИ призвана обеспечить требования по углам обзора.
Задачи ЦМБ:
-
- управление питанием БРД;
-
- сбор данных с БРД;
-
- сжатие и передача данных внешнему потребителю;
-
- хранение снимков в сжатом формате.
Исходя из поставленных задач, в состав ЦМБ включили:
-
1) Flash NAND – устройство хранения данных;
-
2) устройство управления (УУ), включающее в себя центральный процессор, ОЗУ, внутренний коммутатор SpaceWire [1];
-
3) модуль управления питанием (МУП);
-
4) контроллер SpaceWire, обеспечивающий связь с внешними абонентами.
С учетом объема передаваемой информации между модулями СВН, а также количества возможных абонентов (до 16) в качестве внутренне -го интерфейса был выбран интерфейс SpaceWire с транспортным протоколом RMAP [2–3].
Стыковкас внешними абонентами
В качестве внешнего интерфейса в соответствии с требованиями заказчика был также выбран SpaceWire с транспортным протоколом RMAP, но при необходимости его можно заменить на любой другой.
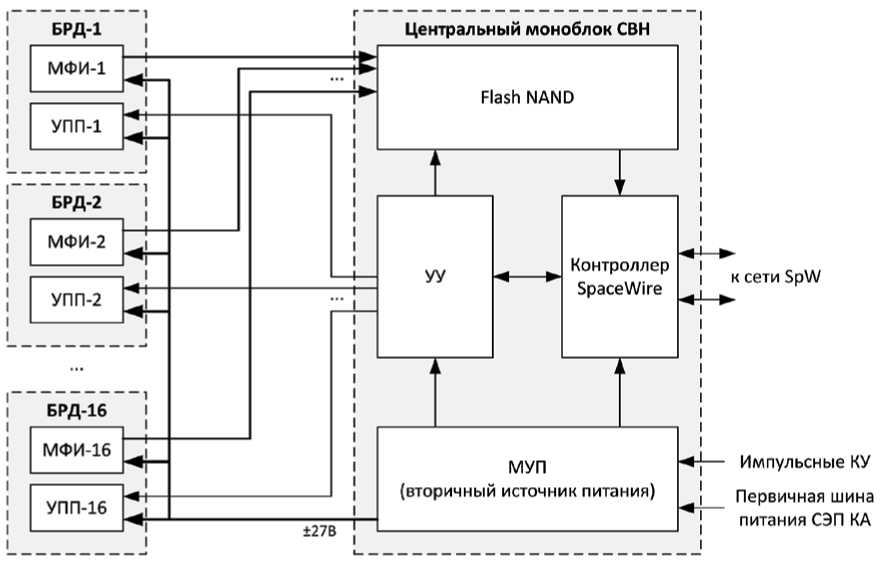
Рис. 1. Структурно-функциональная схема системы визуального наблюдения (СВН)
Одной из проблем, с которой столкнулись при разработке СВН, был большой объем информации, необходимый для передачи на Землю по каналу управления КА. Информативность современных каналов управления КА составляет 8000 бит/с (для некоторых КА 32000 бит/с). С учетом современных возможностей каналов управления изображение размером 96 Кбайт будет передаваться приблизительно за 330 кадров телеметрии, или за 165 секунд (при информативности 8000 бит/с). Однако средства канала управления КА не могут в настоящий момент обеспечить непрерывный прием (без пропуска принимаемых кадров телеметрии) такого количества информации, вследствие чего восстановление изображения наземными средствами становится затруднительным.
Для решения этой проблемы было предложено два варианта решения:
-
1) интегрировать передаваемую информацию в высокоскоростные каналы полезной нагрузки КА;
-
2) уменьшить объем передаваемой информации.
Первый вариант несет множество трудностей организационного характера, связанных с передачей информации от пользователя КА (эксплуатирующей организации) к организации, обеспечивающей оперативный контроль за КА (в данном случае АО «ИСС»), а также с размещением информации от системы визуального наблюдения внутри пакетов информации полезной нагрузки.
Исходя из вышеизложенного, был выбран второй вариант решения проблемы, для чего разработаны алгоритмы сжатия информации и её передачи на наземные средства управления космическими аппаратами порционно [4–5].
Разработка системы визуального наблюдения
Масса и габариты
ЦМБ – 6 кг;
БРД (1 комплект) – 4 кг;
ЦМБ (ДхШхВ) – 200х200х300 мм;
БРД (ДхШхВ) – 200х200х300 мм.
Технические характеристики
Количество ТМ-датчиков – 4, а именно:
-
- 2 аппаратных параметра (0-6В): включение 1-го комплекта, включение 2-го комплекта;
-
- 2 температурных параметра: температура
1-го комплекта, температура 2-го комплекта.
Количество команд управления - 3, с харак- 47
теристиками:
-
- амплитуда от 22 до 31 В;
-
- длительность от 40 до 150 мс;
-
- суммарный ток утечки ключей формирования команд в закрытом состоянии не более ±200 мкА.
Интерфейсы информационного обмена: в качестве внутреннего интерфейса обмена (между ЦМБ и БРД) выбран интерфейс SpaceWire, в качестве внешнего интерфейса обмена – интерфейс SpaceWire с поддержкой протокола обмена RMAP, поддержка других протоколов обмена может быть реализована путем доработки прошивки ЦМБ СВН.
Характеристики камеры
Горизонтальный угол обзора с учетом возможностей унифицированной поворотной платформы: ±180°.
Вертикальный угол обзора с учетом возможностей унифицированной поворотной платформы: ±155°.
Общий вид и краткие характеристики СВН
Внешний вид ЦМБ и БРД приведен на рис. 2 и рис. 3.

Рис. 2. Внешний вид ЦМБ

Рис. 3. Внешний вид БРД
Камера визуального диапазона:
-
- разрешающая способность камеры 1032х779 пикселей;
-
- матрица размером 1/3 дюйма;
-
- цветность: черно-белая в градациях серого (8, 10, 12 бит);
-
- скорость: 40 кадров в секунду;
-
- объектив: опционально;
-
- размер кадра: 640x480 - 48 Кбайт, 1024x768 – 96 Кбайт.
-
- Камера инфракрасного диапазона:
-
- термочувствительность: 0,6 °С;
48 - размер матрицы ИК-детектора: 160x120 то чек;
-
- температурный диапазон: -40 °С...+100 °С;
-
- максимальное расстояние до объекта измерения: 5 м.
Заключение
Выбранный способ построения системы визуального наблюдения, а также технические решения, выбранные при её разработке, позволяют выполнить поставленную задачу в полном объеме, что было подтверждено при проведении лабораторно-отладочных испытаний СВН.
Лабораторно-отладочные испытания СВН проведены в полном объеме и завершены с положительными результатами.
В дальнейшем планируется усовершенствование программного обеспечения в части обработки получаемой с камер информации с использованием разработанных алгоритмов сжатия.
Разработка продолжается.
Список литературы Разработка системы визуального наблюдения
- ESA Standard ECSS-E-50-12C SpaceWire - Links, nodes, routers and networks. European cooperation for space standardization // ESA Publications Division ESTEC. The Netherlands, Noordwijk, 2008. 129 p.
- ESA Standard ECSS-E-ST-50-52C SpaceWire - Remote memory access protocol. European cooperation for space standardization // ESA Publications Division ESTEC. The Netherlands, Noordwijk, 2010. 109 p.
- Разработка транспортного протокола СТП-ИСС для бортовых сетей SpaceWire / Ю. Е. Шейнин, В. Л. Оленев, И. Я. Лавровская и др. // Известия Самарского научного центра Российской академии наук. 2014. Т. 16, № 6 (2). С. 632-639.
- Методы сжатия данных. Устройство архиваторов, сжатие изображений и видео / Д. Ватолин, А. Ратушняк, М. Смирнов и др. М.: ДИАЛОГ-МИФИ, 2002. 384 с.
- Миано Дж. Форматы и алгоритмы сжатия изображений в действии. М.: Триумф, 2003. 336 с.
