Разработка технологии индукционного каротажа в нестационарном режиме при бурении субгоризонтальных участков стволов нефтяных и газовых скважин

Автор: Теплухин В.К., Ратушняк А.Н., Костицын В.И., Ван Сяолун
Журнал: Вестник Пермского университета. Геология @geology-vestnik-psu
Рубрика: Геофизика, геофизические методы поисков полезных ископаемых
Статья в выпуске: 2 т.16, 2017 года.
Бесплатный доступ
Рассмотрены результаты разработки технологии модуля индукционного комплекса (МИР), предназначенного для измерения сопротивления пород в процессе бурения горизонтальных и наклонно-направленных скважин на нефть и газ. Представлены материалы производственно-технологического опробования при проведении эксплуатационного бурения промысловых скважин на территории Республики Башкортостан. Выполнен сопоставительный анализ данных каротажа сопротивления, полученных после завершения бурения, и результатов, зафиксированных комплексом МИР в составе LWD с телесистемой «ТАРГЕТ» в процессе бурения. Приведены технические характеристики параметров комплекса МИР.
Сопротивление пород, горизонтальные и наклонные скважины, месторождения нефти и газа, модуль индукционного комплекса (мир), технология, телесистема "таргет"
Короткий адрес: https://sciup.org/147201014
IDR: 147201014 | УДК: 550.832.75 | DOI: 10.17072/psu.geol.16.2.122
Development of induction logging technology for non-stationary conditions while drilling subhorozontal sections of oil and gas wells
The article presents the results of development of the induction logging module designed for resistivity measurements while drilling horizontal and directional wells for oil and gas. Materials of the tool testing during the drilling of wells in the oil field in the Republic of Bashkortostan are shown. We introduce the comparative analysis of resistivity data obtained after completion of the drilling, and the results obtained with developed complex as part of the LWD telemetry system TARGET during the drilling. The technical characteristics of complex MIR are presented.
Текст научной статьи Разработка технологии индукционного каротажа в нестационарном режиме при бурении субгоризонтальных участков стволов нефтяных и газовых скважин
Одним из наиболее эффективных методов формирования оптимальной системы разработки является разбуривание нефтяных и газовых месторождений горизонтальными и многоствольными наклонно-направленными скважинами. Это приводит к увеличению площади фильтрации и в значительной степени по- вышает эффективность разработки низкопроницаемых коллекторов.
Исследования скважин в процессе бурения LWD (LoggingWhileDrilling) в значительной степени позволяют оптимизировать время на анализ геологической информации в связи с существенным уменьшением зоны проникновения фильтрата бурового раствора в структуру нефтяного или газового коллектора, что
позволяет сократить время его освоения и, это особенно актуально при разработке пластов малой мощности, вести процесс геонавигации траектории ствола скважины в соответствии с морфологией пласта.
В компании «ПетроТул» в 2015-2016 гг. разработана специализированная технология модуля индукционного резистивиметра МИР, позволяющая проводить детальные исследования удельного сопротивления пород в процессе бурения в режиме on-line, основанная на изучении характеристик комплекса электромагнитных полей в нестационарном режиме.
Применение технологии импульсного изучения электромагнитного поля вместо изучения гармонического сигнала (Антонов, 1980; Бурсиан, 1972; Ваньян, 1965; Кауфман, Соколов, 1972 и др.) продиктовано результатами детальных физикотеоретических исследований авторов статьи и большими потенциальными возможностями нестационарного электромагнитного поля в прикладном применении, указанными еще в ранней работе М.И. Плюснина (1968).
Для измерений переменного магнитного поля применяют многовитковые катушки, ориентированные по оси скважины, в которых индуктивно наводимая электродвижущая сила (ЭДС) связана с магнитным полем законом индукции Фарадея.
Определение ЭДС в контуре через циркуляцию напряженности электрического поля 8 ( w ) = J E^l по формуле связи через вектор-потенциал Ev = rot. A в цилиндрической системе координат ( R , φ , z ) дает выражение, учитывающее размер измерительного контура радиуса а:
*
£( w )= EEd = - ja^ —ysin^ (1 + kR) ekR, l o R 2 r aa sin0 = — = , ,
R aA L
где El – напряженность электрического поля, Мz – магнитный момент, A* – век- тор-потенциал магнитного типа; w – циклическая (круговая) частота тока (2πf), 1/с; цо - магнитная постоянная = 4п10-7 Гн/м; k – волновое число среды; L – размер установки (расстояние между генераторным и приемным контурами по оси Z).
Определение ЭДС через изменение потока ( dФ ) индукции магнитного во времени ( dt ) приводит к аналогичному выражению, если измерительный контур имеет малый радиус, величина которого значительно меньше разноса: а < L , sin 0 x a / L,
£ ( w ) = - dф = - j a ^^S И H z = dt (2)
= - jv^ —z3 (1 + kL) e-kL ,
2nL где SИ – эффективная площадь соленоида приемной катушки; Hz – вертикальная составляющая напряженности магнитного поля. Откуда следует, что квадратурные компоненты Re£ = a ■ a- JmHz и J£ = b■ a- ReHz, a, b - сonst.
На основании зависимости (2) произведены расчеты реальной компоненты Re£ поля в зависимости от значений удельного сопротивления среды (рис. 1). Представленные графики наглядно демонстрируют частотные зависимости ЭДС в проводящей среде, где поле является практически реальной компонентой.
В непроводящей среде ЭДС является мнимой величиной
M*S
£ ( w ) = - j a^ 'А = - jJK , 2 nL
SS где K = и Г И - коэффициент взаим- o 2nL ной индукции измерительной и генераторной катушек; SГ и SИ – площади генераторного и измерительного контуров, например, для контуров a = r = 5 см при L = 1 м коэффициент K x 10-8 Гн.
Чтобы избежать частотной зависимости измеряемой ЭДС, в измерительной схеме применяют преобразователь «ток-напряжение» с индуктивностью (измери- тельной катушкой) в цепи обратной связи. Это позволяет регистрировать величину ЭДС, прямо пропорциональную напряженности магнитного поля с учетом сдвига фазы ЭДС относительно магнитного поля на угол п/2.
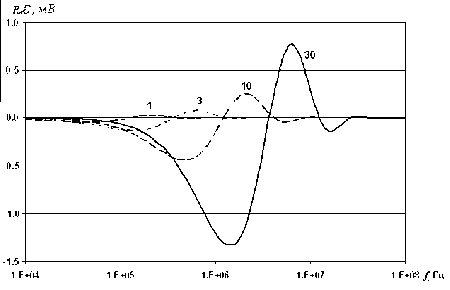
Рис. 1. Частотные зависимости Re£ в контуре малого радиуса. Шифр кривых – сопротивление среды (Ом·м)
Взаимоиндукцию измерительной и генераторной катушек устраняют при фази- ровании измерительного канала перед скважинными измерениями магнитного поля, добиваясь величины J£ = 0 в непроводящей среде (в воздухе).
При импульсном режиме изменения тока выражение для измеряемой нестационарной величины ЭДС в контуре малого радиуса а получим с помощью обратного преобразования Лапласа-Карсона (Ditkin, Prudnikov, 1965).
Формула для нестационарной ЭДС примет вид
*
£ ( t ) = - р .—z — sin Q • u5e-u / 2 2 πR 4
-
- PJ^ ■ £ ( u )
где ρ – удельное электрическое сопротивление, I – сила тока, питающего генераторный контур, u – безразмерный параметр становления, S Г и S И – эффективная площадь генераторного и измерительного контуров соответственно, £ ( u ) = u5e - u 2 /2 .
На полярной оси диполя при размерах измерительного контура а < L и R ® L, sin 0 ~ a / L в проводящей среде (уста- новка для каротажа скважин)
£ ( t ) = -р • J • d к • £ ( u ) , (4)
SS где dK = —,Г И - коэффициент уста-П 2nL новки или постоянная прибора (Doll, 1949; Anderson, Berber, Leveridge. 2008).
Временная характеристика ЭДС определяется только поведением безразмерной функции - электрического числа £(u). Ее анализ [ £’ = 0 | пока- k u J зывает, что максимум электрического числа £(u) = 4,58869 соответствует па раметру u = 5 = 2,235 (или параметра становления поля p = — = 2,5 ). При этом £ (u )• u = 10,2606 = сonst. На max max рис. 2 представлена временная зависимость ЭДС £(t) от диполя с моментом M * = 1 А.м2 на разносе L = 1 м в витке радиусом a = 0,01 м.
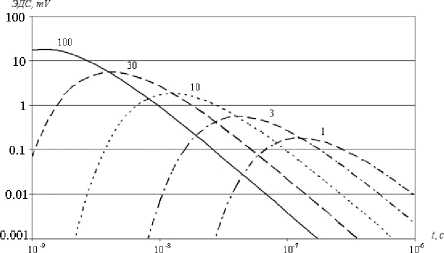
Рис. 2. Временная зависимость нестационарной ЭДС £(t) = pJdK£(u) от р среды в измерительном контуре малого размера (шифр кривых, Ом·м)
Величину удельного сопротивления среды ρ по данным индукционного каротажа можно определять двумя способами:
-
- по времени t , соответствующему экстремуму измеряемой ЭДС,
р = ^ L 2/10/ 1 = 125,66 • L 2/ 1 ; (5)
- по ЭДС
величине экстремума измеряемой
P =
£ (t)
-----exr = K • £ ()), (6) J • dK • 4,58869 ext^7’ где K =----------- - коэффициент
J ■ d ■ 4,58869 к зонда, dK = —.Г И — коэффициент
П 2 nd'
установки.
Важнейшим направлением при исследованиях стандартным индукционным каротажом является изучение влияния значений проводимости среды на величину измерения ЭДС, оценка разрешающей способности технологии по значениям проводимости и определение максимального значения сопротивления среды, при котором возможны измерения.
Основными моделями для оценки эффективности зондовой системы резисти-виметра МИР являлись:
-
1. Стенд с концентрически расположенными проводниками радиусом до 0,9 м и с возможностью изменения сопротивления каждого контура в диапазоне 1 - 400 Ом·м;
-
2. Стенд с концентрически расположенными проводниками радиусом до 2,5 м и с изменением сопротивления каждого контура в диапазоне от 1 до 400 Ом·м;
-
3. Объемная «большая» модель емкостью 5 м3 с изменением сопротивления электролита в диапазоне от 7 до 200 Ом·м и измерением на оси модели;
-
4. Объемная «малая» модель емкостью 0,75 м3 с изменением сопротивления электролита в диапазоне 7 - 200 Ом·м и измерением на оси модели;
-
5. Модельная (тестировочная) скважина в четвертичных отложениях;
-
6. Рабочие (производственные) наклонно-направленные скважины.
Типовые зависимости значения ЭДС на приемном зонде, полученные при наличии одного замкнутого контура с изменением сопротивления в диапазоне 0-400 Ом.м при условии, что контур находится в безграничной непроводящей среде (отсутствуют дополнительные осложняющие факторы), представлен на рис. 3.
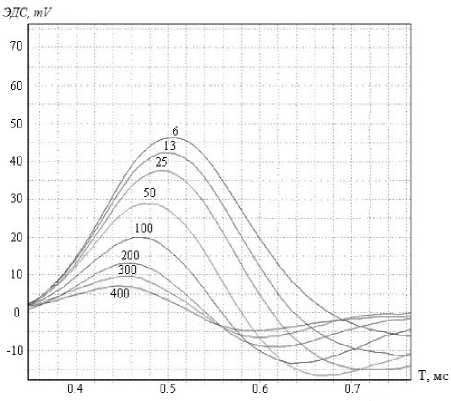
Рис. 3. Зависимость ЭДС от значения со- противления проводящего контура (шифр кривых) на расстоянии 0,925 м в проводящей среде (14,97 Ом·м). Длина зонда L = 1,8 м
Исследования с резистивиметром МИР могут проводиться в диапазоне рабочих температур от 0 до 120°С при изменении рабочего давления от 0 до 60 мПа.
В табл. 1 приведены сведения о точности измерений удельного электрического сопротивления при различных радиусах исследования в диапазоне от 0 до 300 Ом.м. В табл. 2 представлены данные о глубинности исследований (расстоянию от оси скважины) и вертикальном разрешении при удельном электрическом сопротивлении от 1 до 10 Ом·м и в диапазоне от 10 до 50 Ом·м.
С модулем индукционного резистиви-метра МИР проведены испытания на системах двухмерных и трехмерных (объемных) моделей. Были исследованы возможности модуля для решения задач геонавигации, приближения и удаления относительно границ со средами с разной электрической проводимостью.
Результаты исследований представлены на рис. 4. Как видим, форма основного сигнала сохраняется при перемещении прибора от центра сред к границе. При соосном положении осей прибора и емкостей новый экстремум практически не проявляется (вариант 1). При смещении оси прибора в сторону границы сред на величину 1/2 радиуса малой емкости новый экстремум становится сопоставим по амплитуде с основным (вариант 2), а при дальнейшем приближении существенно превышает основной максимум (вариант 3).
Таблица 1. Сведения о точности измерений удельного электрического сопротивления при различных радиусах исследований
|
Радиус исследования |
Диапазон |
Точность, % |
|
0,75–1,0 м |
0–200 Ом · м |
5 |
|
1,5–2,0 м |
0–200 Ом · м |
5 |
Таблица 2. Глубина исследования и вертикальное разрешение
|
Параметр измерения |
Глубина исследования, см |
Вертикаль-ное разрешение, см |
|
|
малый радиус |
большой радиус |
||
|
Удельное сопротивление среды 1–10 Ом · м |
|||
|
Амплитуда |
50–75 |
150–200 |
1 |
|
Удельное сопротивление среды 10–50Ом · м |
|||
|
Амплитуда |
60–100 |
160–220 |
1 |
Отсюда можно сделать вывод, что при приближении к вертикальной границе сред (варианты 2 и 3) на времени 0,2-0,4 микросекунды появляется новый экстремум, амплитуда которого растет с приближением к субвертикальной радиальной границе сред с различными значениями сопротивления. Указанное обстоятельство открывает перспективное направление для проведения геонавигации - управление траекторией бурения в маломощных коллекторах.
Бурение горизонтального участка в скв. 3125 гс (Бузовьязовское месторождение, Башкортостан) было проведено с глубины 2 316 м до глубины 2 412 м (проектный забой) за 2 суток с регистрацией необходимых технологических параметров и данных измерений удельного электрического сопротивления в радиусах 0,75-1,0 м и в диапазоне глубин 2 268-2 412 м c измерением параметров в радиусах 1,5-2,0 м.
Бурение аналогичного участка в скв. 210 гс1 (Шкаповское месторождение, Башкортостан) проведено с глубины 2 152,2 м до 2 343 м по стволу также с регистрацией всех технологических параметров, в том числе и данных электрического сопротивления со стробированием по глубине 0,2 м.
Компоновка низа бурильной колонны включала следующее оборудование: долото, винтовой забойный двигатель, модули гамма-каротажа и инклинометра, разделитель, модуль резистивиметра МИР, комплекс телесистемы с электромагнитным каналом связи «TARGET» (ООО «ПетроТул-НБ»). При проводке скв. 210 гс1 в компоновку бурильной колонны был дополнительно включен модуль резистивиметра APS(Канада) для контроля при сопоставлении измеренных данных сопротивления.
Проведение исследований скважинным резистивиметром МИР непосредственно в процессе бурения позволило получить значения сопротивления в условиях незначительного проникновения фильтрата бурового раствора. По данным бурения и резистивиметра МИР горизонтальные участки стволов скважины вскрыли относительно однородные коллекторы, представленные тонкозернистыми светло-серыми и коричневосерыми известняками.
При сопоставлении данных МИР с результатами каротажа ГИС (ОАО «Баш-нефтегеофизика») по скв. 3125 гс и данными резистивиметра APS по скв. 210 гс1 установлено, что показания резистиви-метров APS и МИР практически совпадают (рис. 5). Расхождение данных находится в пределах допустимой погрешности измерений (5 %).
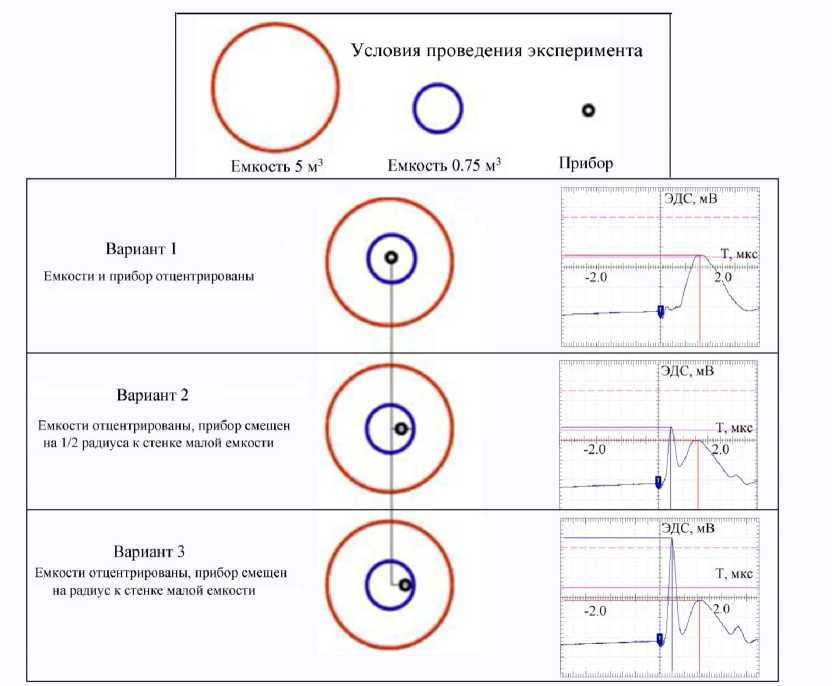
Рис. 4. Вид в плане и результаты эксперимента по изучению степени удаления от границ сред с различными значениями удельного электрического сопротивления
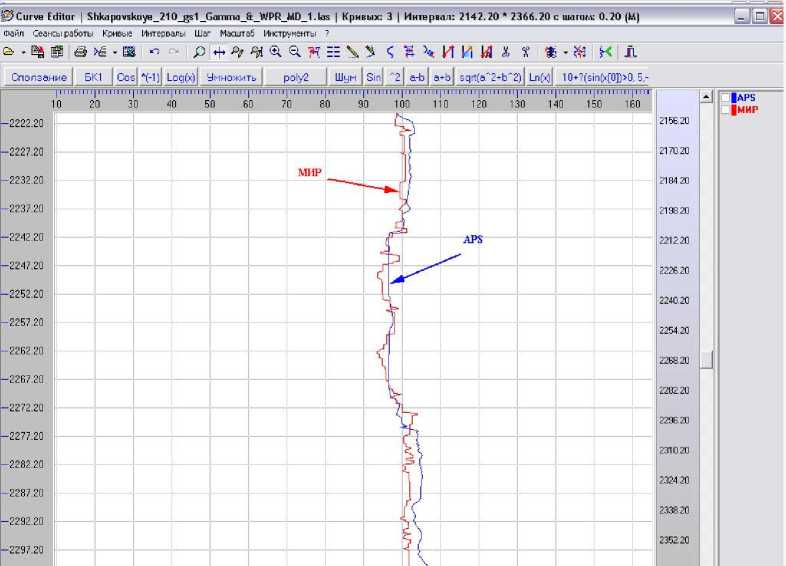
Рис. 5. Сопоставлении данных МИР («ПетроТул-НБ») и резистивиметра APS (Канада) по скв. 210 гс1 (Шкапово, Башкортостан)
-
1. Модуль резистивиметра МИР технологически совместим с телесистемой «TARGET», подключен к стандартной шине передачи данных RS-485. Конструкция модуля МИР допускает свободный допуск к блокам памяти, позволяет скачивать информацию по значениям сопротивления с необходимой детальностью стробирования по глубине.
-
2. Резистивиметр МИР может работать во всех типах бурового раствора, включая соленасыщенные и растворы на нефти (Ратушняк, Байдиков, Теплухин, 2016). Значения удельного сопротивления пород для управления траекторией бурения предоставляются в режиме реального времени.
-
3. Резистивиметр МИР практически может быть адаптирован к работе в составе телесистем с гидравлическим каналом связи.
-
4. Результаты резистивиметрии МИР и дальнейшей интерпретации доступны специалистам еще во время бурения в режиме реального времени, что позволяет оперативно реагировать на изменение геологической обстановки, уточнять в комплексе с гамма-каротажом структурные элементы пласта коллектора и оперативно проводить целевое ориентированное бурение (геонавигация) в процессе проводки ствола скважины.
Список литературы Разработка технологии индукционного каротажа в нестационарном режиме при бурении субгоризонтальных участков стволов нефтяных и газовых скважин
- Антонов Ю.Н. Изопараметрическое каротажное зондирование (обоснование ВИКИЗ)//Геология и геофизика, 1980. № 6. С. 81-91
- Бурсиан В.Р. Теория электромагнитных полей, применяемых в электроразведке. Л.: Недра, 1972. 245 с
- Ваньян Л.Л. Основы электромагнитных зондирований. М.: Недра, 1965. 109 с
- Кауфман А.А., Соколов В.П.Теория индукционного каротажа методом переходных процессов. Новосибирск: Наука, 1972. 108 с
- Кудрявцев Ю.И. Некоторые вопросы теории индукционного каротажа//Прикладная геофизика, 1960. Вып. 28. С. 101-115
- Никитина В.Н. Общее решение осесиммет-ричной задачи теории индукционного каротажа//Известия АН СССР. Серия геофизическая. 1960. № 4. С. 607-616
- Плюснин М.И. Индукционный каротаж. М.: Недра, 1968. 142 с
- Плюснин М.И., Вильге Б.И.Обоснование индукционного каротажа методом переходных процессов//Изв. вузов. Геология и разведка. 1969. № 5. С. 158-165
- Диткин В.А., Прудников А.П. Справочник по операционному исчислению. М.: Высшая школа, 1965. 466 с
- Ратушняк А.Н., Байдиков С.В., Теплухин В.К. Индукционный каротаж скважин с учетом влияния проводящей промывочной жидкости//Уральский геофизический вестник. 2016. № 1 (27). С. 40-47
- Doll H. G. Introduction to Induction Loggingand Application to Logging of Wells Drilled With Oil-Based Mud//Journal of Petroleum Technology. 1949. Vol. 1, № 6. P. 148-162
- Андерсон Б., Бербер Т., Леверидж Р. Трехмерный индукционный каротаж: старые измерения под новым углом//Нефтегазовое обозрение. 2008
- URL: http://www.slb. com/~/media/Files/resour-ces/oilfield_review/russia08/sum08/05_triaxi alinduction.pdf
