Разработка устройства автоматического регулирования двухдвигательным асинхронным электроприводом с применением двунаправленных регистров сдвига

Автор: Утегулов Болатбек Бахитжанович, Марковский Вадим Павлович, Исенов Султанбек Сансызбаевич
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханика
Статья в выпуске: 34 (167), 2009 года.
Бесплатный доступ
Предложен способ, функциональная схема, алгоритм и граф автомата Мили автоматического регулирования двухдвигательного асинхронного электропривода с применением двунаправленных регистров сдвига и магазинов сопротивлений, позволяющие автоматически, в зависимости от текущего режима работы, регулировать скорости вращения электродвигателей и поддерживать их номинальные параметры в соответствии с заданной программой работы.
Двухдвигателъный асинхронный электропривод, алгоритм работы, граф автомата мили, двунаправленные регистры сдвига, магазины сопротивлений
Короткий адрес: https://sciup.org/147158087
IDR: 147158087 | УДК: 621.311
Device development of automatic regulation by double-motor asynchronous drive with usage of bidirectional shift registers
The article presents the designed way, functional scheme, algorithm of work and graph of Mealy automaton of automatic regulation by double-motor asynchronous drive with usage of bidirectional shift register and resistance box which enables to regulate the electric drives rotational velocity depending on the current mode and keep their nominal parameters in accordance with the stated work program.
Текст краткого сообщения Разработка устройства автоматического регулирования двухдвигательным асинхронным электроприводом с применением двунаправленных регистров сдвига
Интенсификация производства в последние годы привела к увеличению объема транспортных и подъемно-транспортных операций, а следовательно к необходимости повышения производительности и автоматизации управления подъемнотранспортными работами.
Работа крановых механизмов определяется назначением крана и условиями производственного процесса. В ряде случаев для механизмов передвижения крановых установок, учитывая технологические требования и режимы работы, целесообразно применение двухдвигательного асинхронного электропривода (ДАЭП). При работе таких кранов возможны проскальзывание приводных колес, заклинивание реборд колес о головки рельсов, различия в диаметрах колес (вследствие неравномерного износа) и пр. Так как статическая нагрузка на опорах в общем случае различна и носит случайный характер, а механические характеристики двигателей механизма передвижения не строго идентичны, то вполне вероятно их несогласованное вращение.
Для улучшения эксплутационных показателей кранов (точности работы, производительности), а также повышения надежности оборудования, упрощения управления следует совершенствовать их электропривод.
Одним из возможных путей устранения вышеописанных недостатков является автоматическое регулирование ДАЭП с использованием полупроводниковых средств, что позволяет повысить технический уровень и упростить эксплуатацию кранового механизма.
На основе вышеизложенного для обеспечения согласованного управления скоростями ДАЭП разработан способ автоматического регулирования с использованием двунаправленных регистров сдвига и магазинов сопротивлений.
Функциональная схема (рис. 1) предлагаемого способа содержит: трехфазную электрическую сеть; электродвигатели асинхронные с фазным ротором - Ml, М2; выпрямители - UZI, UZ2; дроссели - LI, L2; сопротивления - RI, R2; ком-
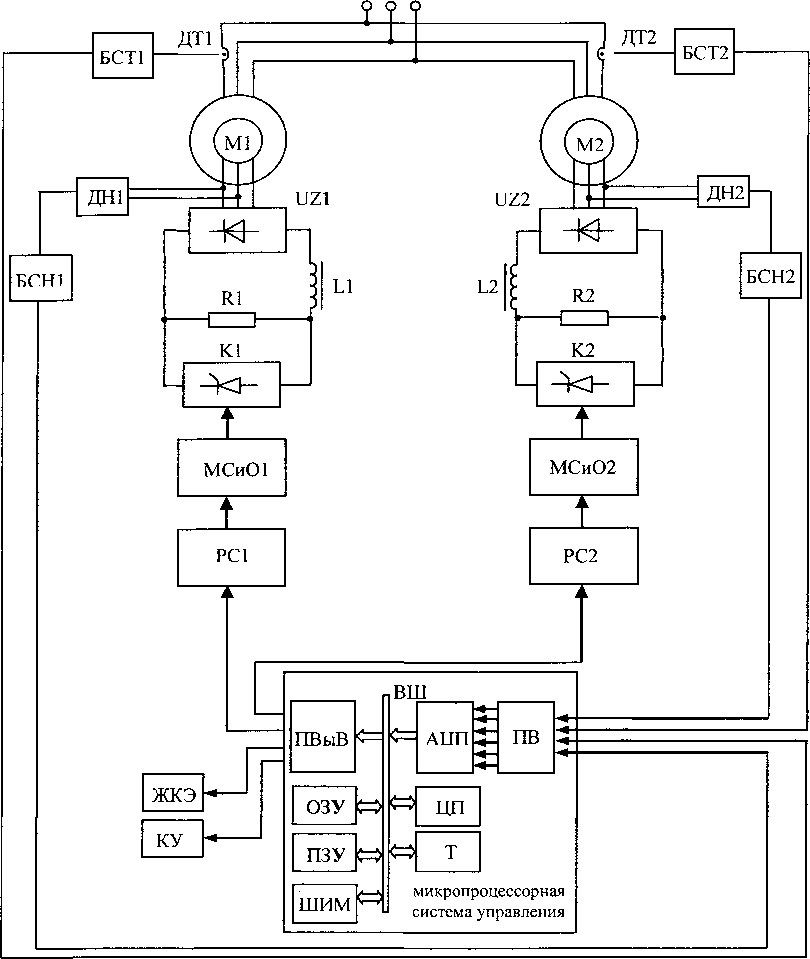
Рис. 1. Функциональная схема способа автоматического регулирования
мутаторы - KI, К2; двунаправленные регистры сдвига - PCI, РС2; магазины сопротивлений и оптопары - МСиО1, МСиО2; микропроцессорную систему управления - МПС; порт ввода - ПВ; аналого-цифровой преобразователь - АЦП; центральный процессор - ЦП; таймер - Т; порт вывода - ПВыВ; оперативное запоминающее устройство - ОЗУ; постоянное запоминающее устройство -ПЗУ; широтно-импульсный модулятор - ШИМ; внутреннюю двунаправленную шину - ВШ; жидкокристаллический экран - ЖКЭ; кнопки управления - КУ; датчики тока цепи статора - ДТ1, ДТ2; блоки согласования токов статора - БСТ1, БСТ2; датчики напряжения - ДН1, ДН2; блоки согласования напряжений - БСШ, БСН2.
Принцип действия разработанного способа состоит в следующем: в микропроцессорную сис тему управления поступает аналоговая информация от датчиков тока статора и датчиков скорости, и если двигатели системы вращаются с отклонением от номинального значения, то в схему вводятся сопротивления с определенными значениями, позволяющие в зависимости от текущего режима работы выровнять скорости вращения электродвигателей и вывести их на номинальный режим работы, соответствующий заданной программе работы.
На основе данного способа необходимо разработать алгоритм и математическую модель ДАЭП с применением в качестве системы управления микропроцессорного средства, двунаправленных регистров сдвига и магазинов сопротивлений.
В настоящее время при проектировании математической модели цифрового устройства наи- большее применение получили методы теории автоматов [1].
Математической моделью любого цифрового устройства является абстрактный автомат, который имеет один вход и один выход и работает в дискретном времени, принимающем целые неотрицательные значения t = 0, 1, 2,... В каждый момент t дискретного времени автомат находится в некотором состоянии a(t) из конечного множества возможных состояний, причем в начальный момент t = 0 он всегда находится в начальном состоянии а(0) = аь В момент t, будучи в состоянии a(t), автомат способен воспринять на входе букву входного алфавита:
z(t)EZ. (1)
В соответствии с функцией выходов он выдает в тот же момент времени t букву выходного алфавита
W(t)=X[a(t); z(t)] (2) и в соответствии с функцией переходов переходит в следующее состояние:
a(t+l)=5[a(t); z(t)]. (3)
Если на вход автомата, установленного в начальное состояние аь подавать некоторую последовательность букв входного алфавита z(0), z(l), z(2),... - входное слово, то на выходе автомата будут последовательно появляться буквы выходного алфавита w(0), w(l), w(2),... - выходное слово.
В классе синхронных автоматов рассматривают, в основном, два типа: автомат Мили и автомат Мура. Между ними существует соответствие, позволяющее преобразовать закон функционирования одного из них в другой или обратно. Автомат Мура можно рассматривать как частный случай автомата Мили, имея в виду, что последовательность состояний выходов автомата Мили опережает на один такт последовательность состояний выходов автомата Мура, т.е. различие между автоматами Мили и Мура состоит в том, что в автоматах Мили состояние выхода возникает одновременно с вызывающим его состоянием входа, а в автоматах Мура - с задержкой на один такт. Наиболее распространенным цифровым автоматом является автомат Мили, закон функционирования которого задается уравнениями:
a(t + l) = 8(a(t),z(t));
w(t) = X (a (t), z(t)); (4)
-
t = 0,1, 2,...
Синтез цифрового конечного автомата Мили сводится к следующим действиям: 1) построение графа конечного автомата; 2) составление структурной таблицы переходов для заданного графа; 3) составление логической схемы автомата.
Граф-схема алгоритма отражает совокупность правил перехода автомата из одного состояния в другое в зависимости от входной информации и внутренних состояний автомата. ■
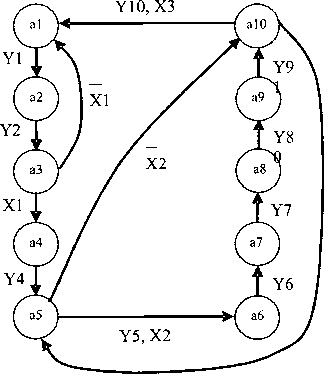
На основе функциональной схемы (см. рис. 1) разработана граф-схема алгоритма и граф автомата Мили устройства автоматического импульсного регулирования ДАЭП с применением двунаправленных регистров сдвига и магазинов сопротивлений (рис. 2).
Число состояний в графе автомата Мили может быть достаточно большим. Для примера составлена структурная таблица переходов автомата Мили устройства автоматического импульсного регулирования ДАЭП (см. таблицу). В каждой строке таблицы записываются: состояния ат, из которых осуществляется переход в автомате; состояния as, в которые переходит автомат из состояния am; X(am,as), Y(am,as) - входной и выходной сигналы на переходе (am,as).
По структурной таблице переходов управляющего автомата получены:
-
- система булевых уравнений функций выходов:
Yj = Т) Т2 ТЗ Т4
Y2 = Т1 Т2 ТЗ т4
Y3 = ti Т2 т3 Т4 X)
Y4 = Т1 Т2 т3 т4 ,
Y5 = Т1 ТЗ Т4 Х2
J - (5)
Y6 = Т1 т2 ТЗ т4
Y7 = Т1 т2 т3 Т4
Y8 = Ti т2 т3 т4
Y9 = Tj Т2 ТЗ Т4
Yw = Tj Т2 тз т4 Х3
-
- система булевых уравнений функций возбуждения элементарных автоматов памяти:
Ф1 = Т1 т2 т3 т4 V ^ Т2 Тз т4 Х3;
Ф2 = Т1 Т2 т3 т4 v Т1 т2 т3 т4 V = Т1 т3 т4;
Фз = Т1 Т2 тз т4 V TI Т2 т3 Т4 V Т1 Т2 ТЗ Т4 V
V ti т2 т3 т4 = Ti Т2 т4 V Т1 т2 т4 = Т1 т4;
Ф4 = Tj т2 тз Т4 V т, т2 ТЗ т4 V Tj Т2Т3 Т4 Xj V
VT}T2T3T4 V Tj Т2ТЗТ4 Х2 VT1T2T3T4 V (б)
VT1 т2 Т3 Т4 VTj т2 т3т4 V Tj т2 тз Т4 V Tj т2 т3 т4 Х3 =
=т} Т2 ТЗ VTj Т2 т3 Т4 Xj V Tj Т3 т4 V TjT2 Т3 Т4 Х2 V
VTj Т3 Т4 V Tj Т2 Т3 VT2 Т3 Т4 V Tj т2 т3т4Х3 =
= Tj т4 V Tj Т2 Т3 V Tj т2 Т3Т4 Xj V Tj т2 т3 Т4 Х2 V
V Т1 т2 т3 v т7 тз Т4 v Т1 т2 тз т4 *3-
Y1
Y2
XI
Y3
Y4
Х2
Y5
Y6
Y7
Y8
Y9
ХЗ
Y10
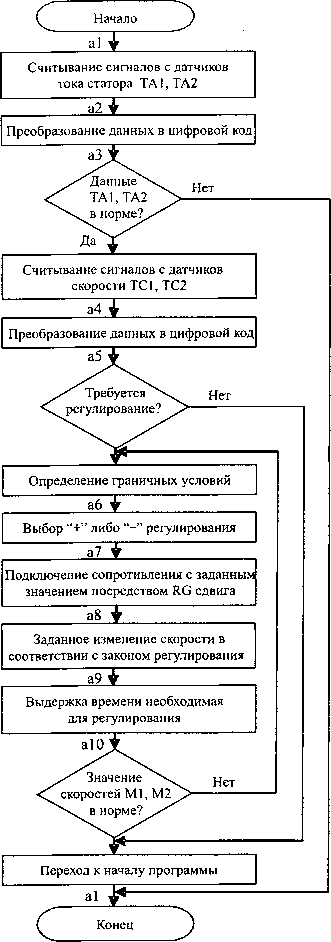
Рис. 2. Граф-схема алгоритма и граф автомата Мили
Структура переходов управляющего автомата Мили устройства автоматического регулирования
|
ат |
К(ат) |
as |
K(as) |
X(a„, а,) |
У(ащ? as) |
F (am, as) |
|
ai |
0000 |
а2 |
0001 |
1 |
Y, |
ф4 |
|
а2 |
0001 |
а3 |
0010 |
1 |
y2 |
фу, Фд |
|
а3 |
0010 |
а4 ai |
ООН 0000 |
Х1 XI |
Y3 |
Фа |
|
а4 |
ООН |
а5 |
0100 |
1 |
y4 |
Ф1) Фз, Фа |
|
а5 |
0100 |
Зб аю |
0101 1001 |
Хг_ Х2 |
y5 |
Фа |
|
Об |
0101 |
а? |
оно |
1 |
Y6 |
Фз^ Фа |
|
а7 |
оно |
а8 |
0111 |
1 |
y7 |
Фа |
|
а8 |
0111 |
Эд |
1000 |
1 |
y8 |
Ф],Ф2,Фз,Фа |
|
а9 |
1000 |
аЮ |
1001 |
1 |
y9 |
Фа |
|
аЮ |
1001 |
ai а5 |
0000 0100 |
Х3 Х3 |
Y10 |
Фь Фа |
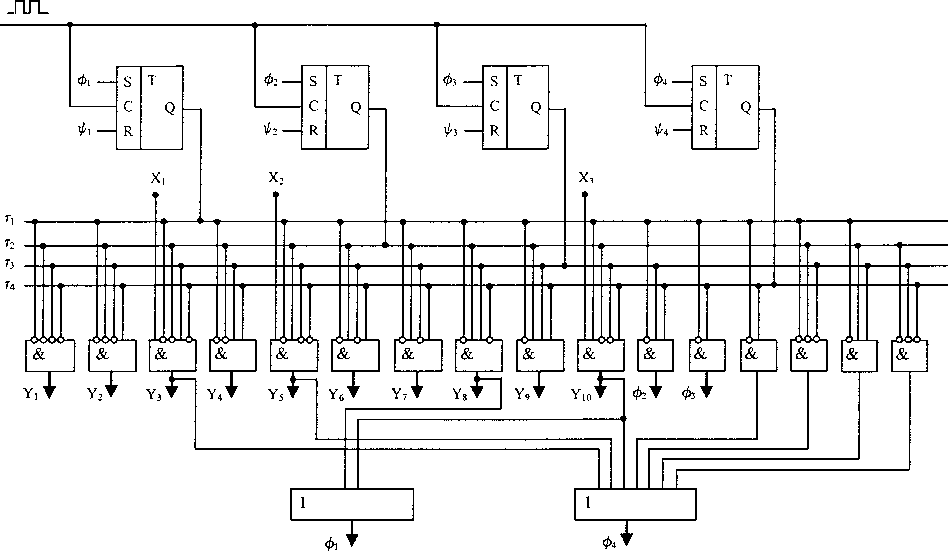
Рис. 3. Логическая схема управляющего автомата Мили
По системе уравнений минимизированных функций выходных сигналов и сигналов возбуждения элементов памяти составляется логическая схема цифрового автомата Мили устройства автоматического регулирования ДАЭП с применением двунаправленных регистров сдвига и магазинов сопротивлений (рис. 3).
Предлагаемый способ, на основе которого составлен алгоритм и разработан граф автомата Ми ли устройства автоматического регулирования ДАЭП, позволяет автоматизировать процесс управления и обеспечить согласованное изменение скоростей вращения двигателей системы кранового электропривода.
Список литературы Разработка устройства автоматического регулирования двухдвигательным асинхронным электроприводом с применением двунаправленных регистров сдвига
- Глушков, В.М. Синтез цифровых автоматов/В.М. Глушков. -М.; Физматгиз, 1962. -476 с.
