Развитие метода синтеза геометрии канатов линейного касания

Автор: Калентьев Е.А., Тарасов В.В., Новиков В.Н.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение
Статья в выпуске: 1-2 т.12, 2010 года.
Бесплатный доступ
На основе системы синтезирующих уравнений геометрии каната линейного касания производится уточнение решения вспомогательного уравнения. Решение строится на отыскании минимума функциональной зависимости, расстояния между винтовыми осями линейно контактирующих проволок, путем разложения производной в ряд Тейлора в окрестности некоторой точки. Показывается, что применение полученных результатов позволяет проводить практические расчеты канатов линейного касания с высокой степенью точности.
Канат линейного касания, метод синтеза, геометрия
Короткий адрес: https://sciup.org/148198945
IDR: 148198945 | УДК: 622.673.6
Development of geometry synthesis method of the linear contingence ropes
On the basis of geometry synthesizing equations system of linear contingence rope specification of the decision of auxiliary equation is made. The decision is under construction on searching the minimum of functional dependence, distances between screw axes of linearly contacting strands, by decomposition of derivative in Taylor's series in environ of some point. It is displayed, that application of the received results allows to spend practical calculations of linear contingence ropes with a high scale of exactitude.
Текст научной статьи Развитие метода синтеза геометрии канатов линейного касания
Стальной канат широко применяется в современной подъемно-транспортной технике, являясь при этом сложным и ответственным элементом. Одним из значимых факторов, обеспечивающих высокий технический ресурс и работоспособность, является линейный контакт проволок в прядях каната. Для расчета геометрии канатов линейного касания в работе [1], была получена система синтезирующих уравнений:
^ 2
^ 1 + ^ 2 ) 2
Ф 12 x 12
2 . 2
1 + Г
= ^ 12
, (1)
- 2 • r1 • r2 • cos(s12);
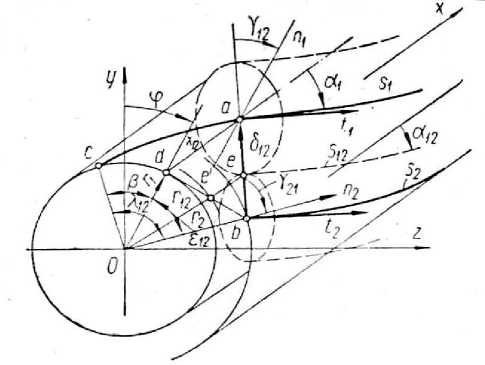
Рис. 1. Линейный контакт проволок в пряди каната
;
X12 = Г • tg(«2 ) • sin(^12 ) = Г • tg(«1 ) • sin£12 ) • ;
r
(3) h
112 2
2 •n; (4) £2 = ^2 — sin (^12 )• tg («1 )• tg («2 ) , (5)
Трансцендентное уравнение (5) имеет вспомогательный характер и может быть решено методом последовательных приближений. В качестве приближенного решения уравнения (5) было предложено использовать выражение (6):
где δ 12 – расстояние между точками a и b (см. рис. 1), δ 1 , δ 2 – диаметры проволок в пряди, х 12 – проекция отрезка δ 12 на ось x, r 1 , r 2 – радиусы винтовых линий проволок в пряди, α 1 , α 2 – углы свивки проволок, ε 12 – разность полярных углов точек a и b, λ 12 – полярный угол контакта.
ctg ( £ 12 ) =
tg(«1 )• tg («2) + cos( A2 ) sin (Я12)
Данное приближенное решение основывалось на малости угла β (см. рис.1) и, как следствие, приближенном равенстве β≈sin(β). При этом выражение (6) дает удовлетворительное решение уравнения (5). Однако возможны случаи, когда величина угла β будет значительна (например, при малом шаге свивки проколок в пряди каната). Кроме того, точность формулы (6) зависит от полярного угла контакта λ12, который в свою очередь связан с количеством проволок в слое пряди каната. Проведенные расчеты показали, что абсолютная погрешность выражения (6) может быть более одного градуса, а в некоторых случаях доходить и до 3-4 градусов. Следует отметить, что в работе [2] рассмотрено применение метода итерации для решения системы уравнений (1-5).
Учитывая вышесказанное, авторами предпринята попытка уточнить решение трансцендентного уравнения (5) для применения его в практических расчетах. Для этого запишем расстояние между точкой b винтовой линии 2-ой проволоки и винтовой линией 1-ой проволоки в зависимости от угла β, используя известную зависимость из аналитической геометрии в пространстве [3], и после преобразований получим:
^12 (Р) = V(Г1 " P^ • ctg2 (a2 )) + r12 + Г2 - 2 • rl • Г2 • cos(^2 - P)
Принимая во внимание, что β = λ 12 – ε 12 , перепишем уравнение (7) в следующем виде:
^ 12 ( £ 12 ) (j r r l ' ( A 2 £ 12 ) • ctg (a i Л + r l + r 2 2 ^ r l ^ r 2 ^ cos ( ^ 12 )
Продифференцируем данное выражение по ε 12 , получим:
d ^ i2 ( £ |2 ) = r l • ( 2 • A 2 2 • £ 12 ) • ctg (a i ) 2 • r l • r 2 • sin ( ^ "12 )
d £ i2 2 • r 12 + r 2 2 - 2 • r 1 • r2 • cos ( s 12 ) + r 12 • ( X 1 2 - e 1 ) 2 • ctg 2 ( a 1 )
Очевидно, что минимальное значение функции δ12 (ε12), на графике рисунок 2 кривая 1, соответствует условию линейного касания проволок. Минимальному значению функции δ12 (ε12) соответствует некоторый угол ε12. Как известно из курса математического анализа значение производной dδ(ε12)/dε12 в этой точке должно быть равно нулю, на графике рисунок 2 кривая 2. Для этого достаточно, чтобы числитель производной dδ(ε12)/dε12 был равен нулю. На графике видно, что в окрестности своего решение производную dδ(ε12)/dε12 можно аппроксимировать прямой. Разложим числитель производной dδ(ε12)/dε12 в ряд Тейлора teilor2(ε12) со степенью старшего члена равного 1, в окрестности точки ε12:
teilor2( £u ) = 2 • r 1 • r 2 • sin ( f 1 2 ) +
2 • r 1 2 • ctg 2 ( a 1 ) + 2 • r • r 2 • cos ( f 12 ) ) • ( ^ 12 - £ 12 ) -
— r • ( 2 • ^ 12 - 2 • £ 12 ) • ctg ( a 1 )
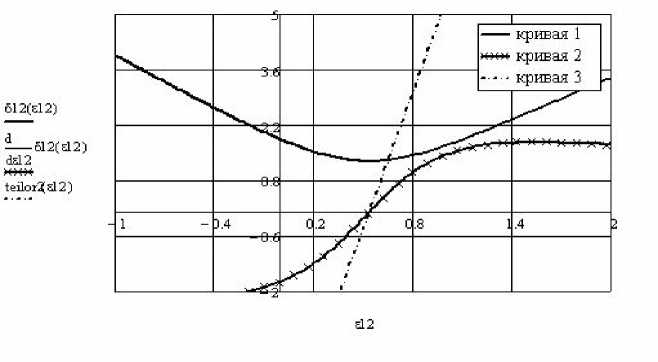
Рис. 2. Графики функций δ 12 ( ε 12 ), dδ ( ε 12 )/ dε 12 , teilor 2( ε 12 )
В качестве точки, в окрестности которой производится разложение производной функции dδ ( ε 12 )/ dε 12 в ряд Тейлора, выбрана точка
ε 12 , вычисленная с использованием выражения (6). Приравняем уравнение (10) к нулю и запишем его решение в следующем виде:
^ 2 • r i - r 2 • tg 2 ( « 1 ) • sin ( ^ 12 ) + r 2 • 8 12 • tg 2 ( « 1 ) • cos ( ^ 12 )
r 2 • cos ( ^ 12 ) • tg 2 ( « 1 ) + r 1
После преобразований получим:
^ 2 - sin (^ ) + 8 12 • COs ( f 12 )
tg(a1 )• tg(«2 ) V cos ( 812 ) +
V ' tg ( « 1 ) • tg ( « 2 )
Проиллюстрируем уточнение решение на примере слоя проволок каната линейного касания, изображенному на рисунке 3, со следующими параметрами: r 1 =1,75 мм, r 2 =1,75 мм, α 1 =0,785 рад, α 2 =0,785 рад, λ 12 =1,0467 рад.

Рис. 3. Слой проволок каната линейного касания
После выполнения расчетов абсолютная ошибка вычисления угла ε 12 с использованием выражения (6) составила Δ ε 12 = 0,012 рад = 0,723о, а при использовании формулы (12) Δ ε 12 = 0,00002 рад = 0,001о. Эталонное значение угла ε 12 определялось с использованием метода секущих и составило ε 12 = 0,5364367 рад.
Выводы: полученная формула (12) позволяет произвести уточнение решения трансцендентного уравнения (5) и может быть использована при выполнении практических расчетов. Кроме этого данная формула может использоваться при расчетах новых или нестандартных конструкций канатов линейного касания. В частности, формула (12) применялась авторами при построении моделей канатов линейного касания и последующем численном анализе напряженно-деформированного состояния.
Список литературы Развитие метода синтеза геометрии канатов линейного касания
- Глушко, М.Ф. Стальные подъемные канаты. -Киев, Техника, 1966. -327 с.
- Шкарупин, Б.Е. К расчету геометрических параметров канатов линейного касания/Б.Е. Шкарупин, Л.А. Кононенко//Прочность и долговечность стальных канатов. -Киев, Техника, 1975. -251 с.
- Корн, Г.А. Справочник по математике для научных работников и инженеров/Г.А. Корн, Т.М. Корн. -М., Наука, 1973. -831 с.
