Реализация нейросетевого контроллера для управления организационно-технологическим комплексом

Автор: Емельянов Рюрик Тимофеевич, Прокопьев Андрей Петрович, Турышева Евгения Сергеевна, Постоев П.А.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 1 (34), 2011 года.
Бесплатный доступ
Рассматривается разработка нейросетевого контроллера системы управленияпроцессом уплотнения асфальтобетонной смеси. Приводится реализация нейросетевого контроллера в программной системе MATLAB/ Simulink и результаты моделирования.
Управление процессом уплотнения, автоматическое управление, нейронные сети
Короткий адрес: https://sciup.org/148176510
IDR: 148176510 | УДК: 625.084/085:625.855.3
Implementation of neural network controller for managing organizational and technological complex
The article is devoted to the development of neural network controller control system compaction process of asphalt concrete. An implementation of the neural network controller in the software system MATLAB&Simulink and simulation results.
Текст научной статьи Реализация нейросетевого контроллера для управления организационно-технологическим комплексом
Подход к моделированию рабочего процесса уплотнения асфальтобетонной смеси, основанный на идентификации рабочих процессов, позволяетсоздавать адаптивные динамические модели на основе экспериментальных данных и дает возможность находить и моделировать сложные зависимости между параметрами рабочего процесса (уплотняющим рабочим органом и асфальтобетонной смесью), не обладая полной информацией об устройстве уплотняющего органа, машины и характеристиках среды.
Постановка задачи. Одной из актуальных задач дорожной отрасли является оптимизация рабочего процесса уплотнения асфальтобетонного покрытия, выполняемого рабочими органами асфальтоукладчика. При этом одним из основных показателей рабочего органа и укладчика в целом является степень предварительного уплотнения асфальтобетонной смеси, от которой зависит не только подбор необходимых типов и количества катков для последующей ее укатки, но и технологические приемы выполнения этой важной и сложной операции [1]. Практика также показала, что чем выше плотность после укладчика, тем ровнее готовое покрытие.
Технологическая настройка асфальтоукладчика связана с обеспечением наиболее высокого качества укладки и предварительного уплотнения слоев асфальтобетонного основания или покрытия и является важным элементом системы управления качеством асфальтобетонных работ на дороге. Такая настройка осуществляется перед началом выполнения рабочих операций и ведется с учетом конструктивных и технологических возможнос-тейи особенностей выбранного укладчика, а также заложенных в проектпроизводства работ (ППР) приемов выполнения и контроля этих операций.
Самыми значимыми и потому непрерывно контролируемыми в системе управления качеством являются пять показателей устраиваемого укладчиком основания или покрытия (еще до начала работы дорожных катков): ширина полосы укладки; поперечный уклон поверхнос- ти слоя укладки; начальная толщина уложенного слоя; степень предварительного уплотнения слоя сразу за укладчиком; ровность поверхности уложенного слоя [1]. Первые три показателя задаются проектом и строительными нормами и правилами (СНиП) (в нормах отклонения от проекта). Два последних показателя не задаются проектом и не нормируются СНиП, но без знания их начальных значений невозможно управлять процессом укладки и обеспечивать требуемые проектом и СНиП конечные результаты по плотности, толщине слоя и ровности готового основания или покрытия [1].
Системы автоматического управления (САУ), устанавливаемые на асфальтоукладчиках, не имеют подсистем управления процессом уплотнения смеси, а ручная настройка режимных параметров не обеспечивает требуемого коэффициента уплотнения, влияющего на качественные показатели дорожного покрытия. В таких случаях приходится увеличивать количество проходов катка, что ведет к росту расходов на топливо и заработную плату рабочим и, соответственно, себестоимости дорожного строительства.
Разработка нейросетевого контроллера. При всей тщательности выбора начальных режимных параметров предугадать неровности микрорельефа и изменение свойств асфальтобетонной смеси при ее охлаждении очень сложно. Но, используя известные зависимости, можно косвенно оценивать наличие неровностей и плотность основания и, следовательно, прогнозировать ожидаемый коэффициент уплотнения асфальтобетонной смеси.
На основании исследований асфальтоукладчика с перспективным уплотняющим рабочим органом, проведенных в реальных условиях эксплуатации, были получены экспериментальные зависимости, позволяющие создать систему управления процессом уплотнения [2].
На трамбующих брусьях асфальтоукладчика были установлены тензодатчики, которые фиксировали изменение усилия на этих брусьях в зависимости от частоты трамбования и скорости движения. Также определялся коэффициент уплотнения в зависимости от частоты трамбования и скорости движения асфальтоукладчика. Полученные данные использовались для разработки системы автоматического управления процессом уплотнения асфальтобетонной смеси асфальтоукладчиком. В качестве основного режимного параметра, обеспечивающего заданные значения степени уплотнения, принята частота вращения эксцентрикового вала привода трамбующих брусьев.
Для решения задачи идентификации рабочего процесса по экспериментальным данным в качестве нейронной сети выбрана сеть встречного распространения. Возможности этой сети превосходят возможности однослойных сетей прямого распространения, а время обучения по сравнению с алгоритмом обратного распространения ошибки может быть уменьшен в несколько раз. Во встречном распространении объединены две модели: самоорганизующаяся карта Кохонена и звезда Гроссбер-га [3]. Их объединение ведетк появлению свойств, которых не было ниуоднойиз них по отдельности.
Подсистема нейросетевого контроллера MyNeuroCont сформирована с применением библиотеки Neural Network Toolbox среды MATLAB/Simulink [4; 5] (рис. 1).
Рассмотрим работу нейросетевого контроллера более подробно.
Усилие на трамбующих брусьях In1, In2 на входе контроллера умножается на коэффициент важности величины W1, W2 соответственно (это необходимо, если входные векторы имеют разную значимость для моделирования). Для уплотняющего рабочего органа асфальтоукладчика усилия с трамбующего бруса равнозначимы и полноразмерны, т. е. W1 =W2 = 1.
Далее величины с учтенной значимостью преобразуются блоком Mux в двумерный вектор. Для работы сети встречного распространения необходимо ортогонализо-вать этот вектор, что и происходит в подсистеме Orthogonalization.
Затем ортогонализованный вектор поступает на вход скрытого слоя Кохонена, проходя перед этим через подсистему Synaps, осуществляющую умножение входного вектора на веса нейрона, которые хранятся в описанных переменных (рис. 2). Из блока подсистемы Synaps вектор попадает в нейрон, реализованный в виде подсистемы. Нейрон разделяет входной вектор на поля и сум-мируетих, после чего отдает их на вход сжимающей функции – гиперболическому тангенсу.
Выход слоя Кохонена попадаетна подсистему MaxVec, которая осуществляет поиск нейрона-победителя согласно концепции слоя. Выход этой подсистемы представляет собой копию входящего в нее вектора и единичного вектора, где все поля равны нулю, за исключением поля нейрона-победителя, которое равно единице.
Далее единичный вектор умножается на веса сигналов, которые берутся из памяти в блоке подсистемы Data Store Read1.
Перемноженный сигнал подается на подсистему AllPlus, которая выдает наибольшее значение из полей вектора. Это связано со структурой входящего внее сигнала, в котором все поля вектора равны нулю, кроме поля нейрона-победителя, равного сигналу этого нейрона.
Выход этой подсистемы и есть искомый выход сети. Но являясь искомым, он не будет требуемым, поэтому мы должны отыскать величину ошибки, т. е. разницу между требуемым и полученным выходом. Величина ошибки выдается блоком. Затем происходит процесс обучения контроллера, при котором ошибка Error1 умножается на коэффициентобучения (в данном случае он равен 0,005), представленный блоком Constant. Этот коэффициент перемножается с единичным вектором UnitVect и старым значением весов. Таким образом будетполучен вектор-прибавка к вектору старых весов, т. е. при их сложении получаются новые веса, которые записываются подсистемой DataWrite1 в отведенные под это переменные.
Однако на этом обучение не заканчивается. Также необходимо подстроить веса вскрытого слоя, для чего используется блок TeachHiddenLayer. Этот блок облада-етсложной структурой, что обусловлено большим количеством линий связей, однако его содержание заключается в следующем:
W н= W с+ α ( X – W c), где W н – новый вес; W с – старый вес; α – коэффициент скорости обучения; X – вектор скрытого слоя. Так реали-
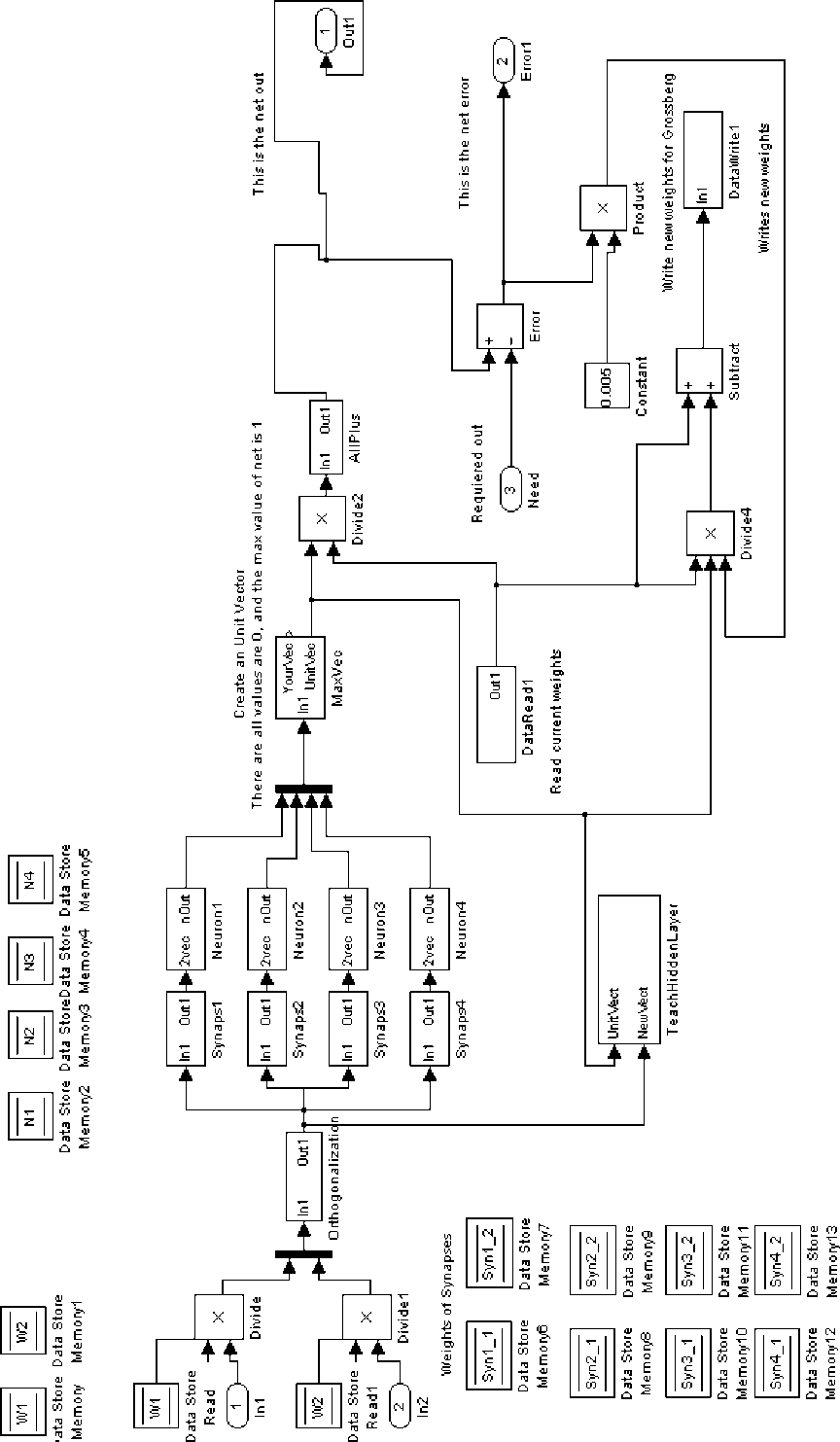
Рис. 1. Структура нейросетевого контроллера
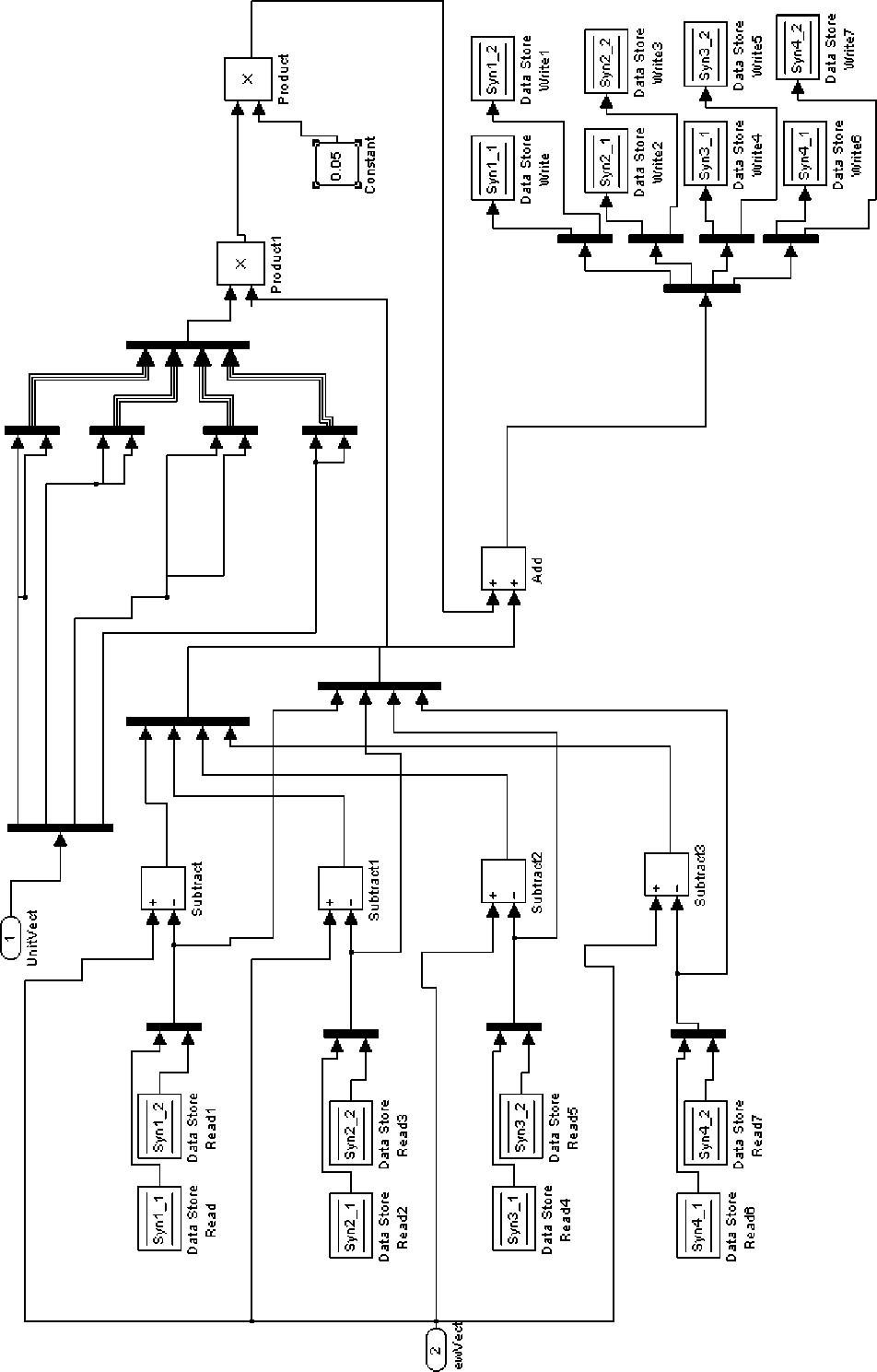
Рис. 2. Структура подсистемы обучения скрытого слоя нейронов Кохонена зуется процесс, при котором один и тот же нейрон реаги-руетна один итотже вход, т. е. происходитклассифика-ция слоя Кохонена.
Результаты испытаний нейросетевого контроллера системы управления процессом уплотнения асфальтобетонной смесью приведены ниже (рис. 3, 4).
При моделировании система управления оценила недостаточность текущей частоты трамбования и постепенно увеличила ее (см. рис. 4). После достижения показателей, близких к заданному значению Ку, регулирование осуществлялось в зависимости от неровностей микрорельефа основания.
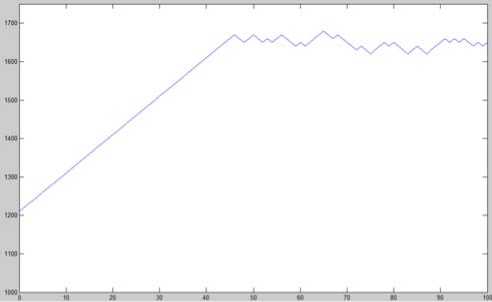
Рис. 3. Изменение частоты вращения привода трамбующего бруса
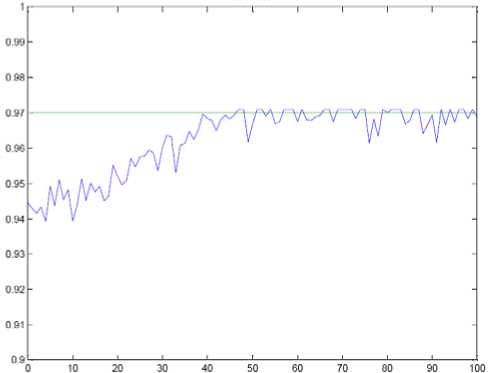
Рис. 4. Моделирование ожидаемого коэффициента уплотнения Ку = 0,97 во времени при работе системы управления с нейросетевым контроллером
Таким образом, рассматриваемый нейросетевой контроллер эффективно оптимизирует процесс уплотнения асфальтобетонной смеси, благодаря чему его можно рекомендовать для модернизации существующих систем автоматического управления.
Рабочий процесс укладки и уплотнения асфальтобетонной смеси из-за изменения ее характеристик во времени характеризуется нелинейными зависимостями и отсутствием возможности точного описания теоретическими математическими моделями. Формирование структуры системы автоматического управления процессами укладки и уплотнения возможно на основе методов искусственного интеллекта с использованием экспериментальных данных, полученных разными авторами.
В данной статье рассмотрен нейросетевой контроллер встречного распространения для САУ подсистемы уплотняющего рабочего органа асфальтоукладчика. Моделирование в системе MATLAB/Simulink показало, что разработанный контроллер может быть использован для моделирования и синтеза систем управления процессом уплотнения асфальтобетонной смеси.
