Регулируемый асинхронный электропривод с дросселями и выключаемыми вентилями в цепи ротора

Автор: Лохов Сергей Прокопьевич, Кравец Денис Николаевич
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханика
Статья в выпуске: 11 (111), 2008 года.
Бесплатный доступ
Исследуются пока только на ЭВМ новые возможности применения выключаемых ключей в асинхронном электроприводе с дросселями и вентилями в цепи ротора.
Короткий адрес: https://sciup.org/147158048
IDR: 147158048 | УДК: 62-83-52:621.314.632:621.313.33
Текст научной статьи Регулируемый асинхронный электропривод с дросселями и выключаемыми вентилями в цепи ротора
Кафедра электропривода ЮУрГУ уже 8 лет разрабатывает и успешно внедряет регулируемые электроприводы на асинхронном двигателе (АД) с фазным ротором, дросселями и тиристорами в его цепи [1,2]. На рис. 1 тиристоры заменены на выключаемые. Возможности такой замены частично исследуются пока на ЭВМ в предлагаемой статье. Принята модель АД в естественных координатах (без вращения осей). Параметры модели АД выбраны достаточно абстрактно, поэтому цифры на диаграммах результатов моделирования не проставлены, но равенство масштабов на разных рисунках обеспечено. Дроссель моделируется упрощенно одной линейной индуктивностью и одним сопротивлением потерь на вихревые токи. Использование уточненной модели дросселя почти не повлияло на качество результатов нашей статьи. Характеристику привода с полностью включенными тиристорами условно называем «естественной характеристикой привода». Это не естественная характеристика двигателя при закороченном роторе. На рис. 2 показана, какой она получилась при выбранных параметрах моделей АД и дросселя. Перенапряжения при выключениях тиристоров уже приводили к выходу их из строя во время наших экспериментах на реальном объекте. Моделирование перенапряжений намного повышает поря- док системы дифуравнений, требует очень маленького шага численного их решения, но мало влияют на электромеханические характеристики привода в целом. Мы продолжаем исследования перенапряжений на моделях и реальном объекте. В данном же исследовании мы пренебрегли ими, путем принудительного обнуления токов в индуктивностях в моменты выключения вентилей в их цепях. Такое объяснение понятно для цепи из одной индуктивности, но в многосвязной цепи надо одновременно изменить все токи, чтобы не нарушались электрические балансы. Поэтому такое упрощение не так просто реализовать программно. Упрощение почти не влияет на электромеханические характеристики потому, что исчезающая при обнулениях индуктивных токов энергия все равно была бы потеряна в демпфирующих RC-цепочках реального привода. Однако это предстоит еще доказать. Собственно, решение изложенных проблем при моделировании отняло у нас основное время.
Проблему нахождения законов изменения углов включения трех обычных тиристоров (трех управляющих координат) ученые всего мира решали десятилетия, с появления первых ионных приборов. И при этом именно нашей кафедре удалось найти новое незамеченное никем решение [1]. Теперь же к трем углам включения добавляются
Рис. 1. Схема электропривода
Рис. 2. Механическая характеристика привода
три угла выключения, поэтому число возможных законов управлений шестью координатами увеличивается на порядки раз.
Первым мы исследовали самый простой закон, при котором тиристоры включаются как диоды при появлении на них положительных напряжений, а мы управляем только тремя моментами выключений. Сразу получились характеристики, уходящие вправо от естественной, пусковой момент в два и раза превысил критический, токи ротора уменьшились. Физическое объяснение этому дала нам сама модель, на которой легко наблюдаются электромагнитные моменты от токов обмоток ротора. Эти моменты начинаются с роста в положительное значение, потом переходят в отрицательную область из-за отстающих от напряжений токов. Выключения отрезают эти отрицательные моменты и одновременно уменьшают ток! Это явление давно известно в АД с конденсаторами в цепи ротора. Конденсаторы компенсируют индуктивности ротора. Так в [3, с. 182] показан пусковой момент конденсаторного привода, в два раза превышающий критический. Из-за последовательного соединения индуктивностей и емкостей возникает резонанс напряжений с увеличением напряжения на роторе. Ток ротора по прежнему отстает от напряжения на кольцах ротора, но напряжение стало опережающим, поэтому ток ротора тоже начинает сдвигаться в сторону опережения по отношению к полю статора, увеличивая создаваемый им момент. Как видим, за увеличение момента при уменьшении тока мы расплачиваемся увеличением напряжений на роторе! Нам не ясен обнаруженный нами механизм увеличения напряжений в цепи ротора при выключениях тиристоров, но они у нас тоже многократно увеличивались. Это увеличение не имеет никакого отношения к перенапряжениям при разрыве индуктивного тока, это - электромеханическое явление, можно условно назвать его «резонансным». Видимо, за все улучшения надо всегда чем-то расплатиться. Следующая проблема оказалась для нас пока неразрешимой. Мы использовали самые простые схемы с синхронизацией моментов выключений от напряжений на кольцах АД, как в [1, 2]. При этом из-за «резонансных явлений» весь привод переходил в режим автономного инвертора на высоких частотах, многократно превышающих сетевую. Пришлось ввести принудительные импульсные ограничения на включения и выключения на требуемой электромеханикой частоте ротора с учетом его скольжения по принципу: на один полупериод частоты скольжения - одно включение и одно выключение. Такие ограничения и позволили получить приемлемо устойчивую работу с вышеописанными эффектами больших моментов и напряжений. Однако исследованные нами законы управления требуют доработки.
Более устойчивыми оказались законы управления с одновременным изменением углов включения и выключения, может быть потому, что подъем напряжений на кольцах при выключениях компенсировался снижением напряжений из-за задержек включений. Удивительно, что эта взаимная компенсация уменьшала токи ротора при равных условиях. Для статьи моделировались два варианта: с управлением только включениями (рис. 3) по известному предложению кафедры электропривода [1] и с управлением включениями и выключениями (рис. 4). Законы изменений тех и других углов не описываются в данной статье потому, что нас сейчас интересуют энергетические возможности, а законы требуют доработки. Обратите внимание на сложные формы напряжений на вентилях на рис. 4 и на увеличение этих напряжений по сравнению с рис. 3. Для получения равных условий обе системы были охвачены отрицательными обратными связями по скорости, поэтому механические характеристики с регулированием на рис. 1 слились по обоим вариантам. Измерялся
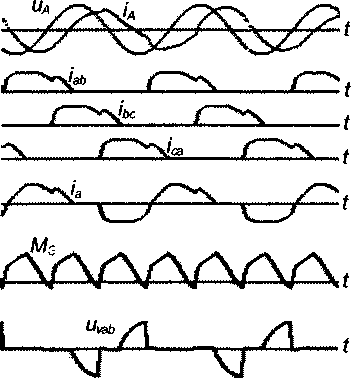
Рис. 3. Процессы в приводе при только включаемых вентилях
_____i±zJ________ Д___t
Д_________Д1
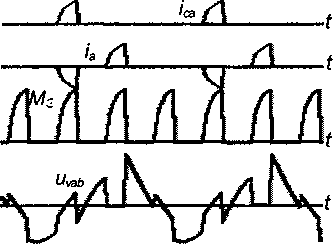
Рис. 4. Процессы в приводе при включаемых и выключаемых вентилях
Электромеханика и усреднялся общий квадрат тока ротора /г2 = /а2 + 1Д + 1с как сумма квадратов токов фаз. Зависимости этих токов от электромагнитного момента Мэ для двух вариантов при равных скоростях (см. рис. 1) показаны на рис. 5. Видим, что на отдельных участках получилось двукратное снижение квадрата тока и такое же уменьшение потерь в
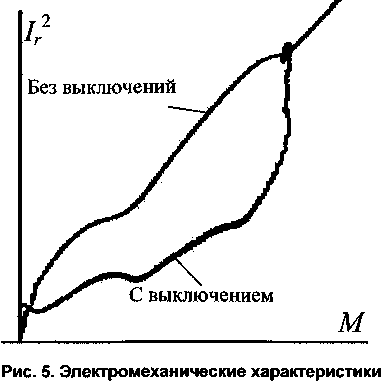
дросселях от него. Сам ток уменьшился в корень из двух раз. Это очень существенное снижение! За этим стоит снижение габаритов дросселей. За такой большой эффект стоит пойти на усложнение электропривода за счет введения в него выключаемых вентилей. Требуют доработки законы управления, надо решить проблемы снижения коммутационных перенапряжений.
Список литературы Регулируемый асинхронный электропривод с дросселями и выключаемыми вентилями в цепи ротора
- Патент России № 2202850. Способ управления асинхронным двигателем с фазным ротором/A.M. Борисов, А.А. Васькин, Г.И. Драчев и др. Заявл. 25.06.1999; опубл. в Бюл., 2003, № 11.
- Лохов С. П Асинхронный регулируемый электропривод с фазным ротором повышенной пульсности/СП. Лохов, Д.Н. Кравец, А.П. Сивкова//Труды Междунар. четырнадцатой научно-технической конф. «Электроприводы переменного тока». Екатеринбург: УГТУ-УПИ, 2007. С. 231-232.
- Чиликин М.Г. Основы автоматизированного электропривода: Учебное пособие для вузов/М.Г. Чиликин, М.М. Соколов, В.М. Терехов и др. М.: Энергия, 1974. 568 с.
