Регулятор тока с цифровым управлением

Автор: Волович Георгий Иосифович, Яковлев Владимир Александрович
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электроэнергетика
Статья в выпуске: 3 т.14, 2014 года.
Бесплатный доступ
Проведен синтез регулятора тока с цифровым управлением по критерию конечного времени переходного процесса и нулевой статической ошибки. Регулятор работает на активно-индуктивную нагрузку. Синтез регулятора осуществлен на основе линейного приближения объекта регулирования с использованием z-преобразования. Определены запасы устойчивости синтезированной системы по изменению коэффициента усиления и по фазе. Для оценки корректности полученных результатов проведено моделирование полученного цифрового регулятора тока в пакете VisSim с учетом нелинейности типа «ограничение». Моделирование показало, что при малых возмущениях переходный процесс в соответствии с аналитическими результатами завершается за один период дискретности. Однако большие возмущения сопровождаются длительными переходными процессами, обусловленными тем, что операция интегрирования, которая входит в вычислительный алгоритм корректирующего фильтра, накапливает в течении длительного времени ошибку, достигающую очень большой величины. При восстановлении линейного режима на переход интегратора в состояние, соответствующее этому режиму, требуется значительное время. Предложен алгоритм управления, включающий программное ограничение максимального значения ошибки регулирования, обеспечивающий окончание переходного процесса при достижении заданного значения тока за один такт и при больших токах.
Регулятор тока, цифровое управление, переходные процессы
Короткий адрес: https://sciup.org/147158268
IDR: 147158268 | УДК: 621.3.072
Digital-control current regulator
We performed synthesis of digital-control current regulator using criterion of transient end-time and zero statistic error. Regulator works for active-inductive error. Synthesis of regulator is based on linear approximation of regulation object with applied z -transformation. We found margin stability of synthesized system by change of amplification coefficient and in phase. To evaluate accuracy of obtained results we modeled digital current regulator in software suite VisSim considering non-linearity such as “constraint”. Modeling revealed that at small perturbations transient process in accordance with analytical results ends within one sampling period. However grand disturbances are accompanied with long-term transient processes determined by the fact that integration operation included in correction filter computational algorithm continuously accumulates error that attains immense value. At restoration of linear mode, integrator transition to the state corresponding to this mode requires significant amount of time. We offer control algorithm including software constraint of control error maximum value, providing transient process end if target current value is achieved for one stroke and at heavy currents.
Текст научной статьи Регулятор тока с цифровым управлением
Регуляторы тока предназначены для обеспечения нагрузки током, который не зависит от выходного напряжения источника и регулируется только управляющим сигналом. Такие регуляторы применяются в измерительных схемах, например, при измерении сопротивления, для управления моментными электродвигателями, соленоидами и др. Поскольку в настоящее время большинство электронных устройств содержит микроконтроллеры (МК), а многие МК, даже недорогие, включают аналого-цифровые и цифро-аналоговые преобразователи (соответственно, АЦП и ЦАП), то становится целесообразным управление регулятором тока от МК.
При проектировании регулятора тока с цифровыми обратными связями необходимо обеспечить надлежащие качество регулирования и запасы устойчивости, в том числе и в условиях больших возмущений.
Регулятор тока
Блок-схема регулятора тока представлена на рис. 1. Здесь обозначено: МК – микроконтроллер, ЦАП – цифро-аналоговый преобразователь, АЦП – аналого-цифровой преобразователь, УМ – усилитель мощности, в качестве которого в случае однонаправленного выходного тока может быть применен эмиттерный или истоковый повторитель, ДТ – датчик тока, R , L – соответственно, сопротивление и индуктивность нагрузки.
Процессы в нагрузке описываются уравнением
Ldit ) + i ( t ) R = u ( t ). (1)
dt
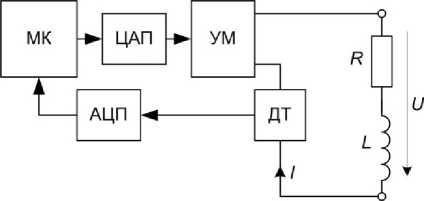
Рис. 1
Структурная схема системы приведена на рис. 2. Здесь обозначено: Т – импульсные элементы с периодом дискретизации Т ; K С – коэффициент передачи датчика тока; т = L / R - постоянная времени цепи нагрузки; блок с передаточной функцией (1 - e - sT )/ sT – экстраполятор нулевого порядка, отображающий ЦАП, который фиксирует на протяжении вычислительного цикла микроконтроллера Т аналоговый выходной сигнал; W * к ф ( z ) – дискретная передаточная функция корректирующего фильтра, реализуемая программой МК; I э – эталонный (заданный) ток.
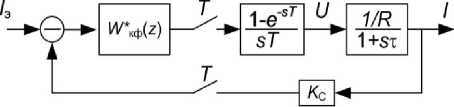
Рис. 2
Синтез корректирующего фильтра
Найдем z-преобразование непрерывной части системы. Согласно [1], дискретная передаточная функция непрерывного объекта с экстраполятором нулевого порядка
W * ( z ) = — z ( Ws) 1 = KC 1 - d , (2)
z [ sR z - d
где W ( s ) = K С / R (1 + s т ) - передаточная функция непрерывной части системы, d = e - T / т .
Для того чтобы обеспечить нулевую статическую ошибку и конечное время переходных процессов, требуется [1], чтобы передаточная функ-
ция системы в замкнутом состоянии
Ф * ( z )
W * ( z ) W ^( z )
1 + W * ( z ) W ^( z )
- 1 = z ,
откуда дискретная передаточная функция корректирующего фильтра с учетом (2)
W * ( z ) = —. (4)
кф K C (1 - d )( z - 1)
Определим запас устойчивости по коэффициенту усиления корректирующего фильтра. Пусть
W * ( z ) = A — . (5)
кф K C (1 - d )( z - 1)
Характеристическое уравнение системы с учетом (5)
A
W * (z )W^( z) +1 = —- +1 = 0.(6)
z - 1
Условие устойчивости
|z| < 1,(7)
откуда с учетом (6) следует:
0 < A < 2.(8)
Сравнивая (4) и (5), убеждаемся, что запас устойчивости по усилению равен 6 дБ, что вполне достаточно.
Запас устойчивости по фазе найдем, анализируя частотную характеристику (ЧХ) разомкнутой системы при z = exp(—' ш Т ):
W раз ( j ®) = W* ( j®)W кф ( j ®) = --^-. (9)
e* -1
Модуль ЧХ при частоте, равной частоте среза, равен единице:
ej - ср T - 1
= 1,
откуда
Ш ср = п / Т . (11)
1 2п arg Wраз(j-cp) = arg en/3 - 1 = -у = -120°. (12)
Таким образом, запас устойчивости по фазе составляет 60 ° , что также достаточно.
Влияние нелинейности
Приведенные выше результаты справедливы для режимов малых возмущений, при которых регулятор тока ведет себя как линейная система. В случае же глубоких возмущений, например, при пуске, проявляются нелинейные свойства регулятора тока, обусловленные ограничением выходного напряжения усилителя мощности. Для оценки влияния этих возмущений проведем моделирование системы в пакете VisSim . Схема моделирования приведена на рис. 3. Здесь обозначено: НЭ – нелинейный элемент, ограничивающий выходное напряжение корректирующего фильтра пределами 0 < u ( t ) < U M . Модель нагрузки, соответствующая уравнению (1), находится в правой части рис. 3 и представлена блоками масштабирования 1/ L и R , а также интегратором и сумматором.
Рассмотрим пример моделирования системы с параметрами: L = 0,1 Гн, R = 0,2 Ом, K C = 0,05 Ом, U M = 15 В, T = 0,0002 с. На рис. 4 представлены графики изменения тока и напряжения при пуске регулятора тока с I э = 0,2 А. В начале процесса ошибка регулирования ε очень велика, поэтому напряжение на выходе УМ максимально. Система разомкнута. При переходе в линейный режим система замыкается и переходный процесс заканчивается за один такт T , т. е. система является оптимальной по быстродействию в классе цифровых систем с периодом дискретизации Т .
На рис. 5, а приведен график изменения тока при пуске регулятора тока с I э = 10 А. Здесь после нарастания тока до заданного значения возникает длительный переходный процесс, обусловленный тем, что операция интегрирования, которая входит в алгоритм корректирующего фильтра, накапливает в течение длительного времени ошибку ε, достигающую очень большой величины. При восста-
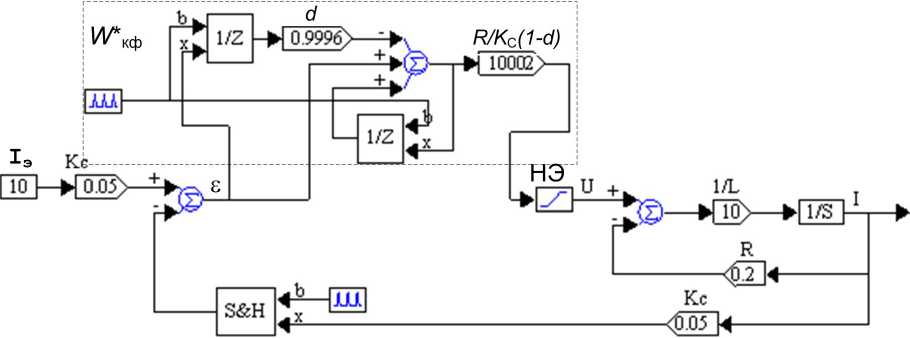
Рис. 3
Волович Г.И., Яковлев В.А.
Регулятор тока с цифровым управлением
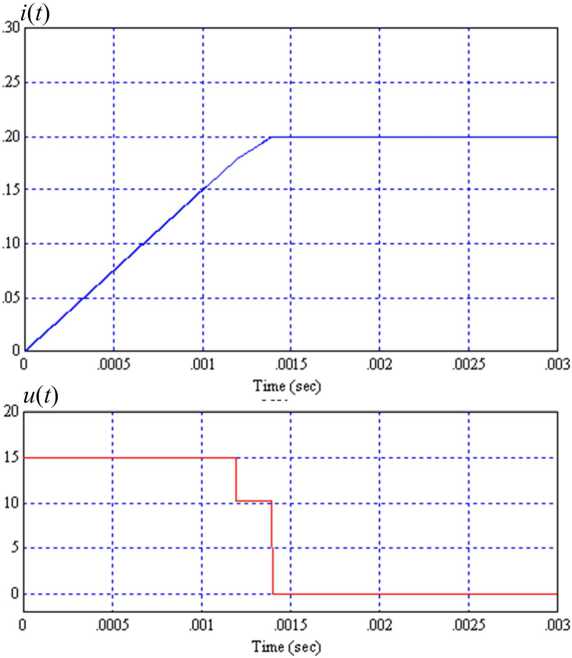
Рис. 4
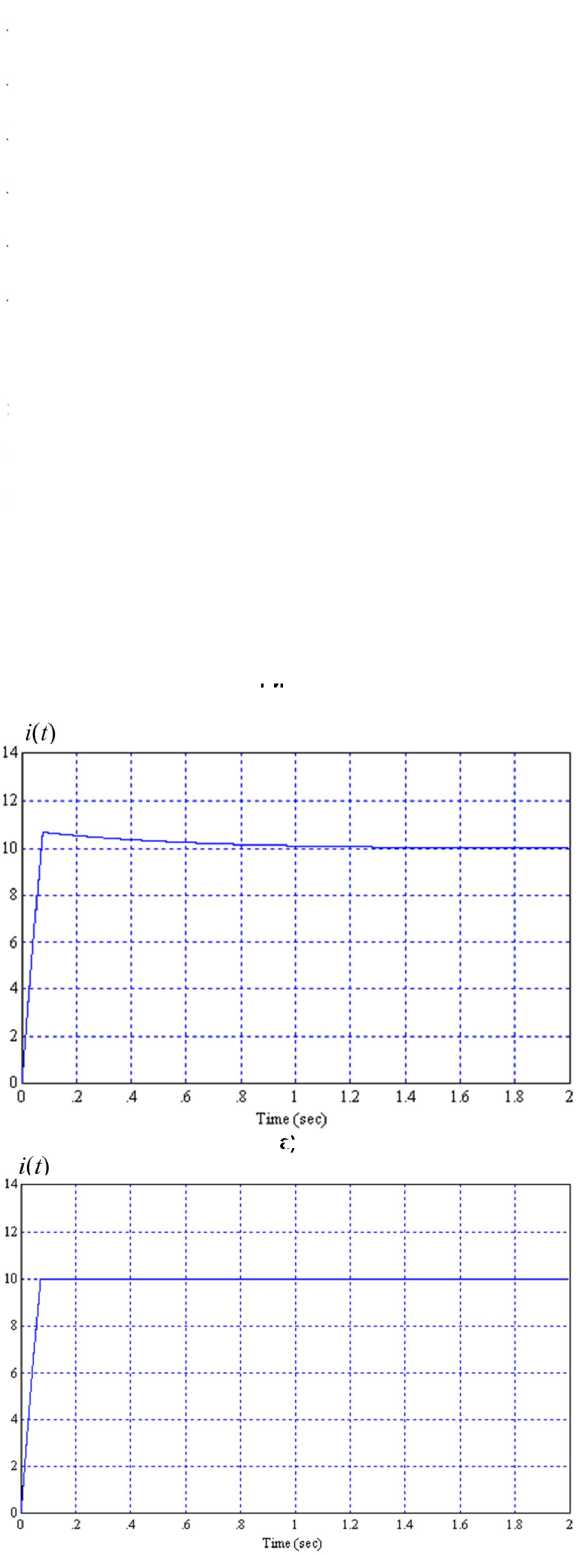
а)
б)
Рис. 5
новлении линейного режима на переход интегратора в состояние, соответствующее этому режиму, требуется значительное время.
Одним из путей устранения этого дополнительного переходного процесса может быть программное ограничение максимального значения ошибки ε величиной, равной
, K C ( 1 - d )
ъ M = U M n
На рис. 5, б показано, что введение ограничения на сигнал ошибки, вычисленного по формуле (13), обеспечивает окончание переходного процесса при достижении заданного значения тока за один такт и при больших токах.
Список литературы Регулятор тока с цифровым управлением
- Кузин, Л.Т. Расчет и проектирование дискретных систем управления/Л.Т. Кузин. -М.: Машгиз. -1962. -683 с.
