Рекомендации по практическому применению радиолокационного сеточного метода коллективного наведения и управляемого целераспределения ракет в интересах эффективной атаки групповой воздушной цели

Автор: Лютиков И.В.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 2 т.18, 2025 года.
Бесплатный доступ
Как известно, для моделирования пространственных и временных параметров применения многопозиционной системы (МПС) «ИД БРЛС истребителя - ИД ГСН ракет» воздушного базирования (с целью последующего эффективного противодействия ГВЦ) используются соответствующие динамические модели. Анализ известных способов математического представления динамики поведения сложных систем показывает, что наиболее удобной формой ее отображения является ориентированный временной граф дискретных состояний системы (процесса). Для пояснения принципа практического применения и отличительных особенностей коллективного наведения и управляемого целераспределения (на основе анализа матрицы девиаций частоты) синтезируемого радиолокационного сеточного метода наведения на основе алгоритмов оптимальной межпозиционной многоканальной обработки принимаемых сигналов в статье представлена динамическая модель применения МПС воздушного базирования «ИД БРЛС истребителя - ИД ГСН ракет» в интересах уничтожения ГВЦ в виде графов дискретных состояний
Групповая воздушная цель, коллективное наведение, целераспределение, эффективная атака, управляемое целераспределение, сеточный метод, графы, дискретные состояния, динамическая модель
Короткий адрес: https://sciup.org/146283094
IDR: 146283094 | УДК: 621.396.96
Practical application recommendations of the radar grid method of collective guidance and guided missile targeting in the interests of an effective attack on a group air target
As is known, for modeling spatial and temporal parameters of the application of a multi-position system (MPS) The “pulse-Doppler onboard fighter radar - pulse-Doppler onboard radar of the missile seeker” of the air-based (for the purpose of subsequent effective counteraction to the group air target), appropriate dynamic models are used. An analysis of known methods for mathematically representing the dynamics of behavior of complex systems shows that the most convenient form of its representation is an oriented time graph of discrete states of the system (process). To explain the principle of practical application and the distinctive features of collective guidance and guided targeting (based on the analysis of the frequency deviation matrix) of the synthesized radar grid guidance method based on algorithms for optimal inter-position multi-channel processing of received signals, the article presents a dynamic model of the use of air-based MPS “pulse-Doppler onboard fighter radar - pulse-Doppler onboard radar of the missile seeker” in the interests of destroying the group air target in the form of discrete states graphs
Текст научной статьи Рекомендации по практическому применению радиолокационного сеточного метода коллективного наведения и управляемого целераспределения ракет в интересах эффективной атаки групповой воздушной цели
This work is licensed under a Creative Commons Attribution-Non Commercial 4.0 International License (CC BY-NC 4.0).
Рекомендации по практическому применению радиолокационного сеточного метода коллективного наведения и управляемого целераспределения ракет в интересах эффективной атаки групповой воздушной цели
И. В. Лютиков
Сибирский федеральный университет Российская Федерация, Красноярск
Цитирование: Лютиков И. В. Рекомендации по практическому применению радиолокационного сеточного метода коллективного наведения и управляемого целераспределения ракет в интересах эффективной атаки групповой воздушной цели / И. В. Лютиков // Журн. Сиб. федер. ун-та. Техника и технологии, 2025, 18(2). С. 249–257. EDN: CKKXPE
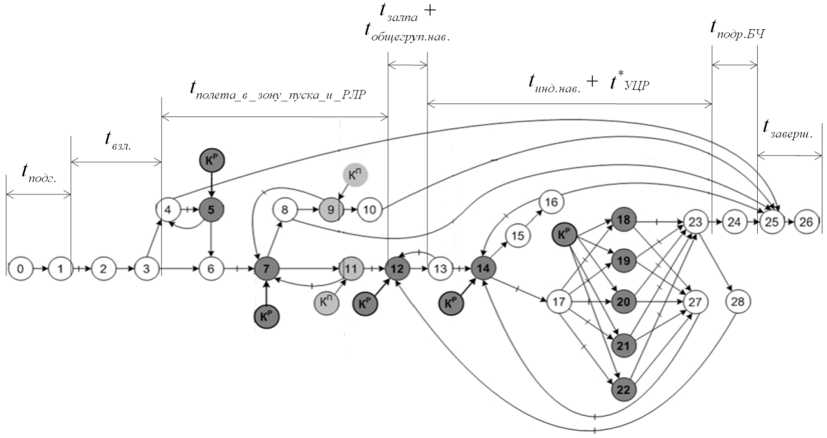
Рис. 1. Динамическая модель применения МПС воздушного базирования «ИД БРЛС истребителя – ИД ГСН ракет» в интересах уничтожения ГВЦ
Fig. 1. Dynamic model of the use of the air–based radar station “ID RADAR fighter – ID missile seeker” in the interests of destroying the GVC из физических особенностей как видов воздействия на конкретные объекты исследуемой системы, так и процесса ее дезорганизации в целом.
Анализ известных способов математического представления динамики поведения сложных систем [11–19], имеющих такие особенности, показывает, что наиболее удобной формой ее отображения является ориентированный временной граф дискретных состояний системы (процесса).
Для пояснения принципа действия и отличительных особенностей управляемого целера-спределения (на основе анализа матрицы девиаций частоты) синтезируемого в [20] радиолокационного сеточного метода наведения на основе алгоритмов оптимальной межпозиционной многоканальной обработки принимаемых сигналов представлена динамическая модель применения МПС воздушного базирования «ИД БРЛС истребителя – ИД ГСН ракет» как объекта исследования в интересах уничтожения ГВЦ (рис. 1) и представляет собой графы дискретных состояний с непрерывным временем и процедуры перехода между этими состояниями.
Для каждого временного отрезка подготовки, принятия решения о начале и завершении применения МПС, начала и окончания функционирования радиоэлектронных систем и средств МПС представлены графы, которые описывают возможные варианты развития исследуемых процессов. Выбор конкретного варианта зависит от степени готовности, состояния систем и путей протекания процессов на нижних уровнях. На графах обозначены «перечеркнутые» переходы, для которых длительность перехода зависит от эффективности внешнего радиоэлектронного воздействия (постановки помех). С использованием динамических моделей определяются: время начала и продолжительность типового эпизода (ситуации); циклы управления различными системами (подсистемами) МПС; уязвимые состояния, обусловленные внешними радиоэлектронным (КР) и огневым (КП) воздействиями.
В графах показан потенциал работы важных с позиции защиты от радиоэлектронного воздействия линий (каналов) управления, связи, передачи данных, аппаратуры потребителей (АП) СРНС и при необходимости оптико-электронных средств (ОЭС) разведки и в других диапазонах ЭМВ, размещенных на МПС воздушного базирования.
В динамической модели применения МПС (см. рис. 1) как объекта исследования представлены следующие этапы:
– подготовка к полету и взлет;
-
– съем координат на основе данных спутниковой радионавигационной системы (СРНС);
-
– корректировка местоположения;
-
– уточнение маршрута полета;
-
– вхождение в зону ведения радиолокационной разведки, зону пуска (залпа) ракет по ГВЦ для их дальнейшего наведения по разработанному в диссертации радиолокационному сеточному методу наведения;
-
– ведение радиолокационной разведки и передачи данных потребителям (воздушные и наземные пункты управления (ВПУ, НПУ), головкам самонаведения ракет (ГСН)) в реальном масштабе времени по различным (выбранным – исправным, высокоскоростным) каналам;
-
– полет ракет с ГСН на этапе дальнего наведения в упрежденную точку (УТ) по общегрупповым параметрам ГВЦ;
-
– процедура управляемого целераспределения* , оптимальная по критерию максимума вероятности уничтожения всех элементов ГВЦ [20];
-
– полет ракет с ГСН на этапе терминального индивидуального наведения ракет с ГСН на каждый элемент ГВЦ;
-
– вывод ракет с ГСН в зону поражения для гарантированного уничтожения всех элементов ГВЦ путем подрыва БЧ каждой ракеты в пределах допустимого промаха ∆ R min ≤ ∆ R 0 («промах в норме») [20];
-
– завершение работы МПС.
В динамической модели представлены следующие пронумерованные дискретные состояния:
-
0 – многопозиционная система (объект исследования) готова к выполнению задач по основному назначению – уничтожению ГВЦ;
-
1 – получен приказ о начале действия МПС по уничтожению ГВЦ на основе априорной информации о ее обнаружении, полетное задание сформировано и введено в систему управления МПС, МПС готова к взлету;
-
2 – с НПУ в подсистему управления МПС поступила команда на взлет;
-
3 – произведен взлет МПС с аэродрома базирования для выполнения задач по основному назначению – уничтожению ГВЦ;
-
4 – маршрут и параметры полета МПС не соответствуют заданным;
-
5 – с НПУ произведена корректировка полета МПС в упрежденную точку (УТ) по маршруту движения ГВЦ методом параллельного сближения (при наличии априорной информации от передовых подразделений радиолокационной разведки РТВ);
-
6 – маршрут и параметры полета МПС соответствуют заданным;
-
7 – СРНС работает (не нарушена), на основе данных СРНС произведен съем координат МПС, корректировка её местоположения, уточнение маршрута её полета;
-
8 – работа СРНС нарушена, на основе данных инерциальной навигационной системы (ИНС) корректировка местоположения МПС, уточнение маршрута полета МПС относительно текущих координат (местоположения);
-
9 – МПС вошла в зону ведения радиолокационной разведки с ошибкой (целеуказания – ЦУ), определенной временем полета без СРНС (по ИНС, программе);
-
10 – работа СРНС не восстановлена, накоплена значительная ошибка определения координат (местоположения) МПС;
-
11 – МПС вошла в начало зоны ведения радиолокационной разведки (наблюдения) без ошибки для последующего залпа и вывода носимых ракет с ГСН на этап дальнего их наведения по общегрупповым параметрам ГВЦ в случае её обнаружения;
-
12 – ГВЦ обнаружена ИД БРЛС ведущего истребителя МПС с априорным количеством ее элементов N gvc , с требуемым временем залпа осуществлен пуск N r ракет с ГСН для их дальнего наведения методом параллельного сближения по общегрупповым параметрам в УТ по маршруту движения ГВЦ;
-
13 – группа ракет с ГСН навелась в УТ, в ведомых элементах МПС (ракетах с ИД ГСН) включен режим наведения на ГВЦ, ведется радиолокационная разведка маневрирующих целей (элементов ГВЦ) с изменяющейся доплеровской частотой (девиацией частоты) по маршруту их (ГВЦ) полета в заданной зоне (районе) (в ближней зоне до 10 км) на терминальном этапе индивидуального наведения на ГВЦ ; в системе сбора, обработки и передачи информации МПС проведено когерентное накопление эхо-сигналов, их межпозиционная многоканальная обработка, обнаружение (архивация и т.д.) достаточного (максимального) объема полученных разведданных для последующей их передачи потребителям (ГСН ракет, ВПУ, НПУ) в реальном масштабе времени и записи (регистрации) на штатный носитель первичной и (или) вторичной информации;
-
14 – проведен поиск исправного высокоскоростного канала передачи данных потребителям (ГСН ракет, ВПУ, НПУ);
-
15 – каналы передачи данных с МПС потребителям (ГСН ракет, ВПУ, НПУ) неисправны, передача разведданных в реальном масштабе времени невозможна;
-
16 – разведывательная информация сохранена на штатный носитель информации («бортовой самописец») на ведущем истребителе МПС с целью накопления (архивирования и т.д.) и последующей доставки потребителям (НПУ) в виде файла (файлов);
-
17 – найден исправный канал (каналы) передачи данных с МПС потребителям (ГСН ракет, ВПУ, НПУ), система передачи данных МПС готова к передаче разведданных в реальном масштабе времени потребителям (ГСН ракет, ВПУ, НПУ);
-
18 – с МПС проведена передача информации (ретрансляция сигнала) потребителям (ГСН ракет, ВПУ, НПУ) по каналам авиационной связи;
-
19 – с МПС проведена передача информации (ретрансляция сигнала) через выносной терминал по каналу передачи данных LOS (Line-of-Sight – «прямой видимости»);
-
20 – с МПС проведена передача информации (ретрансляция сигнала) на выносной видеотерминал по каналу LOS (при наличии оптико-электронной системы наведения);
-
21 – с МПС проведена передача информации (ретрансляция сигнала) потребителям (ГСН ракет, ВПУ, НПУ) по каналу передачи данных LOS;
-
22 – с МПС проведена передача информации (ретрансляция сигнала) по дополнительным (перспективным) каналам BLOS (Beyond-Line-of-Sight – «вне прямой видимости»);
-
23 – разведывательная информация с МПС потребителям (ГСН ракет, ВПУ, НПУ) передана, срывов нет; данных, полученных с элементов МПС, достаточно для наведения на ГВЦ и ее уничтожения с требуемым качеством, время нахождения в заданной зоне (районе) радиолокационной разведки ГВЦ вышло, принято решение на апостериорное управляемое целера-спределение * на основе анализа матрицы CTDM девиации частоты принимаемых от элементов ГВЦ эхо-сигналов [20];
-
24 – наведение назначенных ракет с ГСН на элементы ГВЦ с целью их полного уничтожения в соответствии с выбранным m-методом наведения с подрывом БЧ ракет, при обеспечении допустимого промаха ∆ R min ≤ ∆ R 0 («промах в норме») [20].
-
25 – в систему управления МПС поступила «команда» (или запрограммировано) на окончание работы в заданной зоне (районе) и возвращение на «базу»;
-
26 – МПС закончила работу в заданной зоне (районе) и вернулась на «базу»;
-
27 – разведывательная информация с МПС потребителям (ГСН ракет, НПУ) не передана, или есть срывы в передаче данных (информация передана с ошибками);
-
28 – данных, полученных с МПС, недостаточно для выполнения боевой задачи по основному назначению – уничтожению ГВЦ, время нахождения в заданной зоне (районе) МПС не вышло.
Таким образом, в продолжение [21] для практической реализации в МПС «ведущий активный истребитель типа МиГ-31БМ – ведомый пассивный истребитель типа МиГ-31БМ – пассивные ИД ГСН ракет класса «воздух-воздух»» синтезируемого в [20] радиолокационного сеточного метода коллективного наведения и управляемого целераспределения ракет в инте-

Рис. 2. Внешний вид индикатора истребителя типа МиГ-31БМ
Fig. 2. The appearance of the MiG-31BM fighter indicator ресах эффективной атаки групповой воздушной цели предлагается внедрить на программноаппаратном уровне соответствующий дополнительный многопозиционный режим работы по групповым воздушным целям.
Использование данного режима позволит отобразить на индикаторе командира и (или) штурмана ведущего истребителя типа МиГ-31БМ (рис. 2) признаки «Цель одиночная» и «Цель групповая. Количество целей в группе столько-то» по результатам первичной многоканальной согласованной обработки эхо-сигналов от элементов групповой воздушной цели, принимаемых МПС (ИД ГСН ракет на терминальном этапе их индивидуального наведения), за счет анализа девиации частоты [2, 3, 20] и таким образом улучшения разрешения МПС по данному параметру, что позволит осуществить непосредственно на самих наводимых ракетах управляемое целераспределение, исключит дублирование целераспре-деления, благоприятно скажется на увеличении вероятности поражения всех элементов групповой воздушной цели.
