Реконфигурация бортового комплекса подвижного объекта на основе моделирования вариантов его структурной деградации

Автор: Захаров Иван Вячеславович, Терехов Владимир Геннадиевич, Соколовский Алексей Николаевич, Зыкова Светлана Сергеевна
Рубрика: Управление сложными системами
Статья в выпуске: 4, 2022 года.
Бесплатный доступ
Решение задач применения бортовых вычислительных комплексов подвижных объектов в условиях влияния неблагоприятных факторов различного происхождения требует гибкого управления режимами работы. Предлагаемый способ функционально-параметрического конфигурирования бортовых вычислительных комплексов подвижных объектов основан на оперативном управлении составом выполняемых задач и параметрами функционирования элементов бортовых вычислительных комплексов на основе анализа ресурса системы, условий функционирования и прогнозирования ее состояния.
Бортовой вычислительный комплекс, подвижный объект, реконфигурация, деградация, прогнозирование
Короткий адрес: https://sciup.org/148325022
IDR: 148325022 | УДК: 510.81 | DOI: 10.18137/RNU.V9187.22.04.P.39
Reconfiguration of the on-board complex of a mobile object based on modeling of variants of its structural degradation
Solving the problems of using on-board computing systems of mobile objects under the influence of adverse factors of various origins requires flexible control of operating modes. The proposed method of functional parametric configuration of on-board computing complexes of mobile objects is based on operational management of the composition of tasks performed and the parameters of the functioning of the elements of on-board computing complexes based on the analysis of the system resource, operating conditions and forecasting of its condition.
Текст научной статьи Реконфигурация бортового комплекса подвижного объекта на основе моделирования вариантов его структурной деградации
В современном мире развитие компьютерных технологий и средств вычислительной техники происходит настолько быстрыми темпами, что уже практически не осталось подвижных объектов, не оснащенных системами автоматического управления. Эти системы в составе бортовых комплексов (далее – БК) дают большой ряд преимуществ: скорость обработки данных, полнота учитываемых факторов, точность обработки заданной траектории, выбор оптимальных параметров настройки и др. Как правило, бортовые комплексы функционируют в различных режимах, динамически определяемых командными сигналами и внешними возмущающими воздействиями на подвижный объект (далее – ПО). Решение целевых задач подвижных объектов в условиях возмущающих факторов тесно связано с устойчивостью функционирования бортовых комплексов. Важным аспектом реализации данного направления является обеспечение возможности оперативного авто-
Захаров Иван Вячеславович доктор технических наук, доцент, профессор кафедры информационно-вычислительных систем и сетей. Военно-космическая академия имени А.Ф. Можайского, Санкт-Петербург. Сфера научных интересов: информационно-вычислительные системы и технологии; надежность; живучесть. Автор более 90 опубликованных научных работ.
номного реконфигурирования бортового комплекса посредством гибкой настройки режимов работы его компонентов и диспетчеризации вычислительного процесса на основе прогнозирования его состояния с учетом анализа ресурса и условий функционирования.
Суть процесса реконфигурирования
Процесс реконфигурирования, то есть выбора конфигураций БК [4; 5], состоит в следующем. Оперативная информация от датчиков внешних воздействий и диагностическая информация позволяют на основе заданного классифицирующего правила определить класс события (одиночный отказ, сбой, воздействие некоторого типа и др.). Априорно для каждой ситуации на основе заданных моделей физических процессов, производительности и целевого эффекта моделируется функционирование БК и осуществляется поиск его конфигурации, обеспечивающей предельно возможную результативность на интервале функционирования. В силу неопределенности внешних воздействий принимается сценарный подход, при котором рассматривается множество сформированных, например, экспертными методами, наборов параметров (сценариев) условий функционирования. Сценарии имеют определенный вес и охватывают спектр возможных ситуаций ПО. На основе сценариев строится прогнозирование траекторий деградации БК ПО с учетом динамики внешней среды и выработанного его элементами ресурса, формируются соответствующие оценки результативности функционирования для данного сценария, что позволяет оценить интегральный полезный эффект на интервале функционирования.
Реконфигурация бортового комплекса подвижного объекта на основе моделирования ...
Частная задача выбора конфигураций
Постановка частной задачи выбора конфигураций БК ПО в условиях возмущающих факторов (далее – ВФ) на основе прогнозирования его деградации формулируется следующим образом.
Дано:
-
1. Вектор 3 = < 3 s ( t 0 ) s = 1,..., card ^ параметров состояния ПО, включающий показания
-
2. Множество И сценариев H возмущающих воздействий.
-
3. Классифицирующее правило Т : 3 ^ H .
-
4. Модель J ( t 1; t 2 | G , о , H ) оценки результативности функционирования БК ПО в усло-
- виях детерминированных и случайных внутренних и внешних факторов H , где G – параметры функционирования элементов структуры (аппаратная конфигурация); о - решаемый комплекс вычислительных задач (функциональный режим).
датчиков внешних воздействий, результаты диагностики БК в текущий момент времени t 0 :
[0,элемент БК £ неработоспособен , состояние БК И (t0 )=< и, i= 1,^, N , у = ( v 7 I 1, элемент БК ^исправен.
Найти функционально-параметрическую конфигурацию ( G , о ) , обеспечивающую максимальное значение показателя J ( G , , о j |5 ) результативности функционирования бортового комплекса на заданном интервале времени ( t 0; t s ) :
( G * ? * ) = arg max , J ( G ,i | 3 ) , (1)
GeGJ jd V j / где G - множество возможных аппаратных конфигураций; I - множество функцио- нальных режимов.
Поставленную задачу, исходя из идеи превентивного конфигурирования БК ПО [1; 4], следует декомпозировать на задачу построения оптимальной конфигурации БК для некоторого фиксированного сценария и задачу реконфигурирования БК на множествах сценариев воздействия возмущающих факторов и его состояний.
В результате анализа указанных критериев оценки и выбора конфигураций БК для построения разрабатываемого метода как наиболее предпочтительный использован следующий способ. Пусть известна заранее определенная конфигурация G для состояния 0 x = 0 ( t x ) , в которое попадает БК ПО в момент t x (см. Рисунок 1):
J "( G k ) = А J ( t о; t x | G k ) +А J ( t x ; t s | G ) . (2)
Поскольку оценка J ( G k ) формируется статистически посредством моделирования функционирования БК ПО в условиях его структурно-параметрической деградации на основе модели [3], реализации случайных величин 0 ( t x ) и t x определяются при получении значений А J ( 1 0; t x | G k ) .
Формирование конфигураций бортового комплекса подвижного объекта на основе сценарного подхода
Множество сценариев воздействий порождает множество признаков возмущающих факторов и множество состояний БК, которые дискретизируются и объединяются в ко- нечное счетное множество классов событий. Необходимо произвести поиск конфигурации БК ПО, обеспечивающей предельно возможную результативность на интервале функционирования для каждой ситуации. В связи с этим построение метода выбора конфигураций БК в условиях возмущающих воздействий на основе прогнозирования его деградации представляет собой структурно вложенное варьирование состояний БК, определяемое работоспособностью его компонентов, и варьирование вариантов реализации сценариев воздействия, носящие итерационный характер.
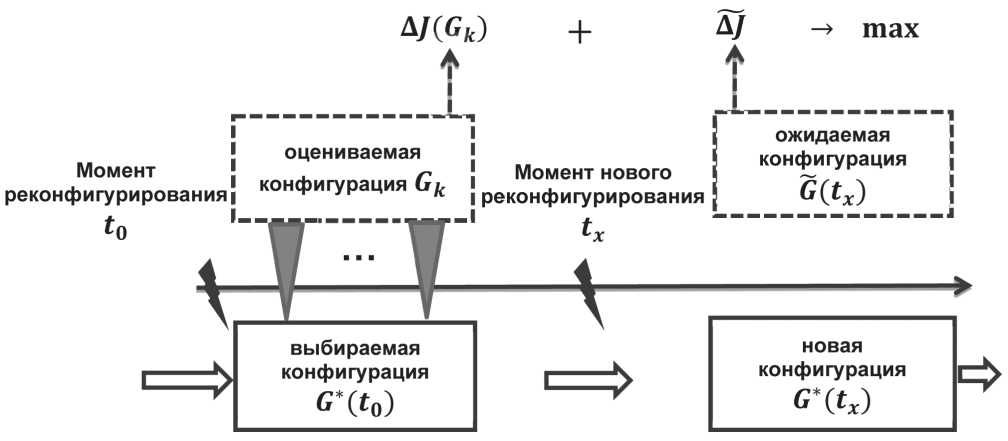
Рисунок 1. Схема оценки и выбора конфигураций БК
Поскольку требуется выбор конфигураций применительно к множеству состояний
БК, формируются подмножества 0(k) состояний 0i е0(k): ^01 = к , где к - число от-l казавших элементов (уровень его структурной деградации). При этом осуществляется фильтрация неработоспособных состояний, соответствующих критическому уровню деградации:
3 G е G, - - : J ( G , 4 |0 , ) > 0, 0 , = 1.6, „в^ .
Это позволяет осуществить варьирование состояний 0 i е0( к ) , {0 i } = Y 0 БК ПО по уровням его структурной деградации к = N - 1, , ,0 . При этом состояние 0 i выбирается таким, что для него возможны переходы системы лишь в те состояния, для которых оптимальная конфигурация в данных условиях функционирования уже выбрана, следовательно, получена оценка результативности функционирования БК. С одной стороны, это дает возможность избежать неприемлемой вычислительной трудоемкости, свойственной парадигме динамического программирования в рамках настоящей задачи при реализации терминального принципа максимизации полезного эффекта; c другой – формируемые оценки учитывают рациональный выбор конфигураций при прогнозировании дальнейшей деградации БК ПО.
На множестве ( Y H = Y H признаков возмущающих факторов для фиксированного состояния 0 i БК варьируется набор параметров YH H , соответствующий согласно правилу Т : ^YH ^ H j сценарию воздействия возмущающих факторов.
Реконфигурация бортового комплекса подвижного объекта на основе моделирования ...
С учетом сложности гетерогенной иерархической структуры БК и разнообразия режимов работы его элементов мощность множества формально синтаксически возможных конфигураций card G достаточно велика. Поэтому задача выбора и построения конфигураций БК ПО может быть решена методом обоснования структуры и параметров отказоустойчивых конфигураций вычислительных систем на основе аппарата генетических алгоритмов [1; 2] с использованием в качестве варьируемого параметра элемента Z j режима его работы g j , а в качестве целевой функции – оценку коэффициента результативности функционирования БК, формируемую на основе заданной модели J = J ( t 1; t 2 | G , f , H ) как
J ” ( G k ) = A J ( t 0 ; t x\ G k , HT ) + A J ( tx ; t j G , H ) , G = CF ^ , 1 : 0 ( tx ) = 0 t
и включающую разыгрывание реализаций H сценария H j ВФ: H j ^ H = х ( H j , 6 ) .
Таким образом, для 0 i , H j определяется оптимальная аппаратная конфигурация
G * = arg max J " ( G k 10 i , H j ).
G k e G
Далее осуществляется выбор функционального режима БК ПО:
f = arg max AJ ( f, G * ) . f e i ( t о ) V /
*
Формируемые в результате параметры G * функционирования элементов и функциональный режим f БК ПО, соответствующие максимальному целевому эффекту его применения при условиях 0 i и H j , определяют значение элемента CF ij = ( G , f ) конфигурационной таблицы || CF ij || , заполняемой итерационным путем.
В ходе функционирования ПО информация от датчиков внешних воздействий, результаты контроля и диагностики состояния элементов БК определяют вектор У параметров состояния. Процедура дискретизации регистрируемых на ПО физических параметров ВФ У ^ YH формирует слово YH признаков уровней ВФ, а результаты диагностирования компонентов ПО - слово Y и состояния БК.
Таким образом, признаки уровней ВФ YH и текущего состояния БК Y 0 определяют выбор элемента конфигурационной таблицы || CF ij || , задающего конфигуратор CF = ( G , f ) , который, в свою очередь, формирует управляющие воздействия на аппаратные компоненты, соответствующие конфигурации G * , и осуществляет диспетчеризацию вычислительного процесса, соответствующую функциональному режиму f . Далее в результате проведенного реконфигурирования БК осуществляется решение вычислительных задач в сформированной функционально-параметрической конфигурации ( G * ,f' ) .
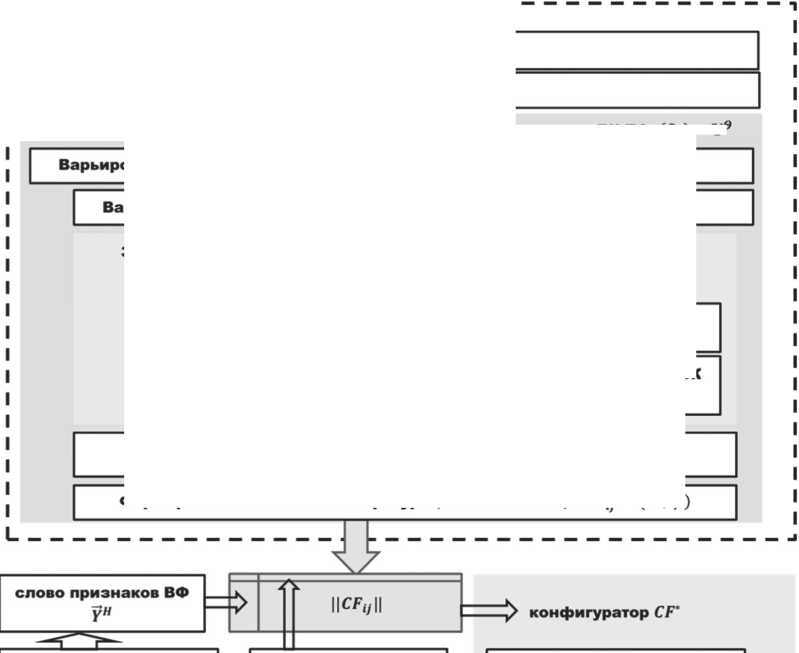
Схема построения данного подхода представлена на Рисунке 2.
Модель оценивания результативности функционирования БК ПО )=КЦД2\СЛ.Н)
J
Формирование множеств состояний БК 0( 6 б^:^^ = к, к - число отказавших элементов (уровень структурной деградации)
Фильтрация неработоспособных состояний БК:
ЭбЕСДе 2: /(6Д|0,) > О, 0, =< в^-Дж >
Моделирование на множестве признаков ВФ {V^p = YH
Варьирование YH j
Идентификация сценария ВФ F", ^ И, состоянием БК ПО 0, 6 0^
Моделирование на множестве вариантов структурной деградации БК ПО [0,} = Vе уровнем структурной деградации БК ПО к = N — 1,... ,0
Эволюционный поиск оптимальной аппаратной конфигурации G* = argmax/"(6/(|0i,«/)
Разыгрывание реализации сценария ВФ Hrfl = x(Hj,®
Оценка коэффициента результативности функционирования БК ГЧС^ = Д/(10; tx\Gk,R ) + d/(tx; t$|G, Й ), G = CFjb I:6(tx) = 0,
Выбор функционального режима ^* = arg шах Д/Д, G*)
Формирование элемента конфигурационной таблицы CF,, = (СД*)
Дискретизация регистрируемых физических параметров ВФ fl -> YH
слово состояния БК Vе
Выбор аппаратной конфигурации CF" -> G
Выбор функционального режима CF" -» V
Формирование вектора состояния (наблюдаемых параметров ВФ и диагностических признаков) fl

решение вычислительных задач в сформированной функциональнопараметрической конфигурации (С'Д1)
управляющие воздействия на аппаратные компоненты
диспетчеризация вычислительного процесса
Рисунок 2. Схема реконфигурирования БК ПО
Выводы
Анализ эффективности способов реконфигурирования БК ПО при различных параметрах его возможных функциональных режимов подтвердил, что расширение возможностей функционального реконфигурирования (разнообразие функциональных режимов
Реконфигурация бортового комплекса подвижного объекта на основе моделирования ...
в смысле ценности и ресурсоемкости вычислительных задач) существенно повышает эффект от аппаратного (параметрического) реконфигурирования (выбора режимов элементов). Относительный выигрыш незначителен при экстремальных вычислительных нагрузках, а также малоресурсоемких задачах. Наиболее выгодна – область средних вычислительных нагрузок (системы, не обладающие многократным избытком быстродействия и энергоресурса, что характерно для БК в силу жестких массогабаритных и энергетических требований к ним). Относительный выигрыш возрастает с ростом числа элементов БК.
Заключение
В целом анализ применения представленного метода показал целесообразность его использования при разработке алгоритмов оперативной автономной реконфигурации БК ПО, функционирующих в условиях неблагоприятных факторов различного происхождения. Результаты моделирования показали, что применение разработанного метода превентивного конфигурирования, обеспечивающего предельно возможную результативность его функционирования, позволит:
-
• снизить потери задач при отказах в БК приблизительно в 2 раза относительно схем с не-нагруженным резервом и в 2…3 раза относительно максимальных (полных) конфигураций;
-
• повысить среднюю производительность БК на 10…20 %.
Список литературы Реконфигурация бортового комплекса подвижного объекта на основе моделирования вариантов его структурной деградации
- Басыров А.Г., Забузов В.С., Захаров И.В. Метод превентивного функционально-параметрического конфигурирования бортовой вычислительной системы космического аппарата на основе прогнозирования ее деградации // Труды Военно-космической академии имени А. Ф. Можайского. 2018. № 665. С 183-193.
- Басыров А.Г., Захаров И.В., Шушаков А.О. Метод выбора структуры неоднородной иерархической информационно-вычислительной системы на основе генетического алгоритма // Труды Военно-космической академии имени А. Ф. Можайского. 2018. № 665. С. 14-24.
- Захаров И.В. Модель перестраиваемой бортовой вычислительной системы в условиях возможной деградации // Труды Военно-космической академии имени А. Ф. Можайского. 2017. № 658. С. 144-152.
- Захаров И.В., Терехов В.Г., Соколовский А.Н. Превентивное конфигурирование бортовых вычислительных систем на основе прогнозирования их деградации // Естественные и технические науки. 2018. № 9. С. 137-139.
- Моделирование функционирования живучих бортовых вычислительных систем с учетом их структурно-параметрической деградации / И.В. Захаров, В.С. Забузов, А.Н. Соколовский, К.А. Эсаулов // Наукоемкие технологии в космических исследованиях Земли. 2016. Т. 8, № S1. С. 60-66.
