Решение навигационной задачи с использованием модели полного электронного содержания Gemtec

Автор: Холмогоров А.А., Иванов В.Б., Горбачев О.А.
Журнал: Солнечно-земная физика @solnechno-zemnaya-fizika
Статья в выпуске: 1 т.5, 2019 года.
Бесплатный доступ
Данная статья посвящена исследованию возможности повышения точности позиционирования в одночастотной спутниковой радионавигационной аппаратуре за счет использования эмпирической модели полного электронного содержания GEMTEC. Сравнивалась эффективность модели GEMTEC и модели Клобучара, которая рекомендована к использованию интерфейсным контрольным документом GPS. Тестирование проводилось на собственных наблюдательных пунктах, а также на данных международной сети станций IGS в системе GPS. Использование международной сети позволило выбрать для тестирования значительный период времени с 2001 по 2017 г. В результате было показано, что использование модели GEMTEC существенно снижает средние ошибки позиционирования по сравнению с применением модели Клобучара. Была продемонстрирована также возможность внедрения модели GEMTEC для ее полнофункционального использования в одночастотных приемниках бытового класса на примере российского приемника МНП-М7.
Одночастотный приемник, модели ионосферы
Короткий адрес: https://sciup.org/142220315
IDR: 142220315 | УДК: 502.3 | DOI: 10.12737/szf-51201912
Solving a navigation problem with the total electron content model Gemtec
This article explores the possibility of improving the accuracy of positioning in single-frequency satellite radio navigation equipment through the use of an empirical model of the total electronic content GEMTEC. The effectiveness of this model is compared with that of the Klobuchar model, which is recommended for the GPS interface control document. We conducted testing at our observation points, using data from the international network of IGS stations in the GPS system. The use of the international network allowed us to select a long period of time for the testing from 2001 to 2017. As a result, it was shown that the GEMTEC model significantly reduces the average positioning errors as compared to the Klobuchar model. We also demonstrate the possibility of introducing the GEMTEC model and its full-featured use in single-frequency home-class receivers, for example, in the Russian receiver MNP-M7.
Текст научной статьи Решение навигационной задачи с использованием модели полного электронного содержания Gemtec
Одним из основных источников погрешностей позиционирования в глобальных навигационных спутниковых системах (ГНСС) является дополнительное запаздывание распространения навигационных сигналов в ионосфере Земли. Абсолютные величины этих погрешностей могут составлять единицы — десятки метров. В одночастотных навигационных приемниках для коррекции ионосферной погрешности используются математические модели состояния ионосферы. Выходным параметром таких моделей является полное электронное содержание (total electron content, ТЕС), которое определяет время дополнительного запаздывания распространения навигационных сигналов. В Интерфейсном контрольном документе ICD GPS [Interface Control Document,
2018] для коррекции ионосферного запаздывания рекомендуется использовать ионосферную модель Клобучара [Klobuchar, 1987] . Модель Клобучара позволяет получать значение вертикального ТЕС для заданных географического положения и времени суток с использованием восьми входных коэффициентов, передаваемых с определенной периодичностью в навигационных сообщениях системы GPS. Модель создавалась в виде весьма упрощенной вычислительной схемы с учетом экономии вычислительных ресурсов навигационной аппаратуры. Модель позволяет компенсировать в среднем 50–60 % дополнительного ионосферного запаздывания [Klobuchar, 1986] . Очевидно, что в современных условиях такая точность модели не удовлетворительна. Заметим, что делаются попытки модификации этой модели.
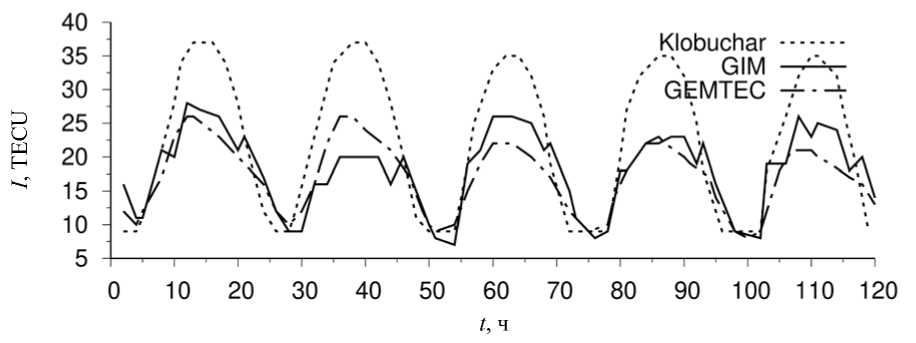
Временной ход вертикального ТЕС в течение 5 сут по данным карт GIM (сплошная линия), модели Клобучара (пунктирная линия) и модели GEMTEC (штрихпунктирная линия)
Так, работа [Tong et al., 2017] посвящена повышению точности модели Клобучара для условий высоких широт. Вместе с тем существует ряд ионосферных моделей, обладающих более высокой точностью воспроизведения ТЕС, чем модель Клобучара, которые могли бы стать ей альтернативой. Наиболее известна из них Международная справочная модель ионосферы IRI [Bilitza, 1990] . Также популярной является модель NeQuick [Dudeney, 1978] , ориентированная на использование в ГНСС GALILEO. Однако обе эти модели изначально воспроизводят вертикальное распределение электронной концентрации N e . Необходимое для решения навигационной задачи значение ТЕС рассчитывается в них интегрированием распределения N e по высоте. Такой метод определения ТЕС представляется избыточным в плане затрат вычислительных ресурсов. В настоящее время имеется большое количество экспериментальных измерений ТЕС в различных условиях в разных географических регионах. Поэтому целесообразным представляется создание эмпирических моделей, воспроизводящих непосредственно полное электронное содержание. Две такие модели были разработаны практически одновременно и независимо несколько лет назад. Речь идет о модели NTCM_GL [Jakowski et al., 2011] и созданной авторами данной статьи модели GEMTEC [Ivanov et al., 2011] .
Модели NTCM_GL и GEMTEC используют практически один и тот же массив первичных экспериментальных данных, но принципиально различаются методиками обработки этих данных. В модели NTCM_GL первичные данные аппроксимируются некоторым набором математических функций с оптимальным подбором соответствующих коэффициентов. В модели GEMTEC используется разложение исходных данных по естественным ортогональным функциям (метод главных компонент) [Jolliffe, 2002] . Сравнительный анализ этих двух моделей, представленный в [Ivanov et al., 2016] , показал преимущество модели GEMTEC. Однако представляется интересным оценить эффективность модели GEMTEC непосредственно при решении навигационной задачи.
ТЕСТИРОВАНИЕ МОДЕЛИ GEMTEC
Детальное описание модели GEMTEC представлено в статье [Ivanov et al., 2011] . Лежащий в ее основе метод главных компонент позволяет существенно сжать исходный массив данных и отфильтровать содержащиеся в них шумовые флуктуации. Модель представляет собой компактный блок числовых данных, содержащий естественные ортогональные функции и коэффициенты разложения исходных данных по этим функциям. Исходными данными для построения модели являются карты GIM (Global Ionosphere Mars), представленные Европейским центром определения орбит CODE за период с 2003 по 2012 г. Процедура расчета ТЕС в модели GEMTEC сводится к обращению соответствующей программы к этому блоку с применением интерполяции к входным параметрам — географическим широте и долготе, времени суток, месяцу и дню месяца, уровню солнечной активности, определяемому по индексу F 10.7 — интенсивности радиоизлучения Солнца на длине волны 10.7 см. При обращении к модели GEMTEC проводится только ряд простейших арифметических операций, без расчетов каких-либо функций (в отличие от модели NTCM_GL), что обеспечивает высокую скорость расчетов.
На первом этапе оценки эффективности модели GEMTEC изучалось качество воспроизведения моделью первичных данных ТЕС. На рисунке показаны типичные временные вариации вертикального TEC I ( t ) в фиксированной среднеширотной точке 45° N, 0° E. Изображен интервал времени t длительностью 120 ч (горизонтальная ось). По вертикальной оси отложены значения I ( t ) в единицах TECU.
Сплошной линией изображен временной ход значений TEC из карт GIM, штрихпунктирной — расчет по модели GEMTEC, пунктирной — расчет по модели Клобучара. Можно видеть, что модель GEMTEC обеспечивает заметно лучшее воспроизведение экспериментальных значений TEC, чем модель Клобучара.
Далее был проведен анализ эффективности модели GEMTEC при непосредственном решении нави-
Таблица 1
Средние значения полной (3D) ошибки позиционирования для станций сети IGS за 2001–2011 гг.
|
Станция |
Координаты |
Без коррекции, м |
Модель Клобучара, м |
Модель GEMTEC, м |
|
CHAT |
43.6°S, 176.2° E |
3.67 |
0.87 |
0.49 |
|
NRC1 |
45.4° N, 75.6° W |
3.18 |
1.01 |
0.40 |
|
TIDB |
35.4° S, 148.98° E |
3.22 |
1.42 |
0.87 |
|
USNO |
39.8° N, 77.0° W |
3.51 |
1.16 |
0.62 |
|
INVK |
68.3° N, 133.5° W |
3.18 |
1.32 |
0.24 |
|
Среднее по станциям |
3.35 |
1.16 |
0.52 |
|
Таблица 2
Средние ошибки позиционирования по измерениям 2014 г. на собственном наблюдательном стенде
Аналогичное тестирование было выполнено на собственном наблюдательном стенде в г. Иркутске с использованием российских навигационных приемников МНП-М7 производства Ижевского радиозавода. В одном из приемников использовалась стандартная модель Клобучара, в другом — модель GEMTEC. Было проведено пятьдесят сеансов изме- рений в весенне-летний период 2014 г. длительностью около 24 ч каждый. Значения индекса солнечной активности в данный период изменялись от умеренно низких (F10.7=95) до умеренно высоких (F10.7=170). Вычислялись средние за сутки отклонения измеренных координат фазовых центров антенн от их истинных значений по высоте, направлениям север—юг (положительное значение означает смещение на север) и запад—восток (положительное значение отвечает за смещение на восток), абсолютная горизонтальная и абсолютная полная (3D) ошибка, а также их доверительный интервал с вероятностью 0.95. Затем выполнялось усреднение этих значений по всем пятидесяти сеансам. Значения всех ошибок в метрах приведены в табл. 2. Приведенные результаты показывают существенное уменьшение средней ошибки позиционирования по высоте и широте в модели GEMTEC по сравнению с моделью Клобучара.
Представленные выше результаты относятся к полному циклу солнечной активности 2001–2011 гг., в основном к тому же периоду, данные которого использовались для построения модели. К настоящему времени прошла половина нового солнечного цикла, поэтому можно провести анализ эффективности модели GEMTEC с учетом последних пяти лет вне диапазона использованных для построения модели данных. Снова были взяты указанные выше станции системы IGS, за исключением станции CHAT, для которой полный набор данных отсутствует. Для остальных четырех станций обрабатывались данные за 22-е число каждого месяца с 2012 по 2016 г. Получены полные (3D) ошибки позиционирования для решения навигационной задачи с исполь-
Таблица 3
Средние значения полной (3D) ошибки позиционирования для станций системы IGS за 2001 г.
|
Станция |
по модели Клобучара, м |
по модели GEMTEC, м |
|
NRC1 |
0.84 |
0.45 |
|
TIDB |
1.26 |
0.72 |
|
USNO |
1.01 |
0.83 |
|
INVK |
1.01 |
0.36 |
|
Среднее |
1.03 |
0.59 |
Таблица 4
Средние ошибки позиционирования по измерениям 2017 г. на собственном наблюдательном стенде
Сравнение данных из табл. 1 и 3 показывает, что с учетом последних пяти лет эффективность модели GEMTEC немного снизилась, но осталась по-прежнему более высокой, чем эффективность модели Клобучара.
Далее было выполнено тестирование модели GEMTEC на собственном наблюдательном стенде по пятидесяти суточным сеансам в период весна— лето 2017 г. Аналогично тесту 2014 г. вычислялись средние за сутки отклонения измеренных координат фазовых центров антенн от их истинных значений по высоте, направлениям север—юг и запад— восток, абсолютная горизонтальная и абсолютная полная (3D) ошибки. Затем выполнялось усреднение этих значений по всем пяти-десяти сеансам. Значения всех ошибок в метрах приведены в табл. 4.
Из сравнения табл. 2 и 4 видно, что модель GEMTEC по-прежнему имеет преимущество в точности позиционирования по сравнению с моделью Клобучара в десятки процентов по каждому из параметров.
ЗАКЛЮЧЕНИЕ
Проведенное тестирование эффективности моделей полного электронного содержания демонстрирует преимущество модели GEMTEC над моделью Клобучара. Тестирование проводилось по данным, полученным как на аппаратуре высокого класса — приемниках станций сети IGS, так и на аппаратуре потребительского класса — приемниках МНП-М7. Уменьшение ошибки позиционирования при использовании модели GEMTEC вместо модели Клобучара составляет десятки процентов по каждому из параметров. Продемонстрирована полнофункциональность модели GEMTEC при работе в реальной навигационной аппаратуре — приемнике МНП-М7.
Модель GEMTEC требует введения значения индекса солнечной активности F10.7. При тестирова- нии значение индекса вводилось вручную, тогда как в реальных условиях это действие должно быть автоматизировано. В настоящее время данная функция в действующих ГНСС не реализована. Однако, согласно Интерфейсному контрольному документу ГЛОНАСС [Interface Control Document, 2016], с введением в эксплуатацию спутников ГЛОНАСС-К с кодовым разделением сигналов значение индекса солнечной активности будет транслироваться в навигационном сообщении ГЛОНАСС, что и обеспечит необходимую автоматизацию.
Таким образом, модель полного электронного содержания GEMTEC может быть рекомендована для использования в современной одночастотной радионавигационной аппаратуре, что обеспечит заметное повышение точности позиционирования объектов в системах GPS и ГЛОНАСС.
Список литературы Решение навигационной задачи с использованием модели полного электронного содержания Gemtec
- Bilitza D. International Reference Ionosphere 1990. Lanham, 1990. 156 p.
- Dudeney J.R. An improved model of the variation of electron concentration with height in the ionosphere//J. Atmos. Terr. Phys. 1978. V. 40, N 2. Р. 195-203 DOI: 10.1016/0021-9169(78)90024-7
- Interface Control Document. ICD GLONASS CDMA General Description. Edition 1.0. Russian Space Systems. Moscow, 2016. 119 p.
- Interface Control Document, IS-GPS-200J. 2018. 224 p.
- Ivanov V.B., Gefan G.D., Gorbachev O.A. Global empirical modelling of the total electron content of the ionosphere for satellite radio navigation systems//J. Atmos. Solar-Terr. Phys. 2011. V. 73. P. 1703-1707 DOI: 10.1016/j.jastp.2011.03.010
- Ivanov V.B., Gorbachev O.A., Kholmogorov A.A. Comparative quality analysis of models of total electron content in the ionosphere//Geomagnetism and Aeronomy. 2016. V. 56, N 3. P. 318-322
- DOI: 10.1134/S0016793216030075
- Jakowski N., Hoque M.M., Mayer C. A new global TEC model for estimating transionospheric radio wave propagation errors//J. Geodesy. 2011. V. 85, N 12. P. 965-974
- DOI: 10.1007/s00190-011-0455-1
- Jolliffe I.T. Principal Component Analys. New York: Springer-Verlag, 2002. 488 p
- DOI: 10.1007/b98835
- Klobuchar J.A. Design and characteristics of the GPS ionospheric time-delay algoritm for single-frequency users//Proc. PLANS’86. Las Vegas, 1986. P. 286-286.
- Klobuchar J.A. Ionospheric time-delay algorithm for single-frequency GPS users//IEEE Transactions on Aerospace and Electronic Systems. 1987. V. 23, N 3. P. 325-331
- DOI: 10.1109/TAES.1987.310829
- Tolman B., Harris R.B. The GPS Toolkit//Linux J. 2004. P. 72.
- Tong Bi, Jiachun An, Jian Yang, Shulun Liu. A modified Klobuchar model for single-frequency GNSS users over the Polar region // Adv. Space Res. 2017. V. 59, N 3. P. 833-842
- DOI: 10.1016/j.asr.2016.10.029
