Решение задач жесткого плоского нагружения в рамках эндохронной теории неупругости для больших деформаций и поворотов

Автор: Кадашевич Юлий Исаакович, Помыткин Сергей Павлович
Статья в выпуске: 3, 2011 года.
Бесплатный доступ
В работе излагается метод решения задач неупругого поведения материала при жестком плоском нагружении в рамках эндохронной теории неупругости для больших деформаций и поворотов. Приводится ряд примеров, демонстрирующих возможности предлагаемых определяющих соотношений.
Неупругость, эндохронная теория, большие деформации, жесткое нагружение, определяющие соотношения, плоский случай
Короткий адрес: https://sciup.org/146211389
IDR: 146211389 | УДК: 539.374
Solutions of rigid plane problems in the framework of inelastic endochronic theory at large deformations and rotations
Method for solving of material behavior problems under rigid plane loadings in the framework of endochronic theory of inelasticity at large (finite) deformations and rotations is proposed. Some numerical examples are presented. The possibilities of introduced constitutive equations are demonstrated.
Текст научной статьи Решение задач жесткого плоского нагружения в рамках эндохронной теории неупругости для больших деформаций и поворотов
Геометрически нелинейные теории неупругости достаточно давно и весьма подробно изучаются исследователями [1-5]. Классическая эндохронная теория Валаниса, естественно, тоже имеет ряд вариантов, учитывающих большие деформации [6-7]. В [8] были сформулированы основные принципы учета больших деформаций и поворотов в эндохронной теории тензорно-параметрического типа. Наиболее полный набор вариантов определяющих соотношений этой теории можно найти в [9]. В [10-11] опубликованы некоторые результаты, полученные в рамках эндохронной теории тензорно-параметрического типа, учитывающей большие деформации и повороты, на простых и сложных путях нагружения. В предлагаемой статье представлена подробная схема решения определяющих уравнений неупругого поведения материалов на плоских жестких путях нагружения.
1. Определяющие соотношения теории неупругости эндохронного типа
Рассматривается вариант эндохронной теории неупругости тензорно-параметрического типа для больших деформаций и поворотов [9] в виде
О
I *1 ° ° r r + ат =----
11 2 G 2 G g + а
* ОО °
I r | +Т r , 8 = D , 8 q = -° , K
*
, ° * * . ° О r = 8-(1 -а)—, r = 8-(1 "а)—, r = D-(1 ‘Отут, 2 G 2G2
*
т = т ( I r l, I r l X I r I
J^ dr : dr ,
*

dr dr dt dt
Здесь в безындексной форме записи тензоров т - аналог деформационного предела текучести, g - аналог коэффициента упрочнения, G - модуль сдвига, K - объемный модуль, a - параметр эндохронности, 0 < а < 1, 8 0 = 8 ii , ° 0 = a ii , r - девиатор вспомогательного параметри-
О О ческого тензора. Объективные производные ° и 8 девиатора тензора напряжений Коши о и девиатора тензора деформаций 8 определяются формулами типа Грина-Нахди:
О *
О *
° = °+°О-О° , 8 = 8 + 80-08 ,
*
где О = QQT - тензор вихря, Q - ортогональный тензор поворота в полярном разложении F = QU градиента деформации F . Кроме того, U -
*
правый тензор удлинения, L = FF
^^^^в
1 - градиент скорости деформации,
D = ( L + L ) ^2 - тензор скорости деформации, причем U 2 = F T F и Q = FU -1.
Второе соотношение в (2) фактически определяет меру деформации, автоматически порождаемую нейтральной коротационной производной Грина-Нахди при преобразованиях вращения в форме s = Q^ QTDQ) dt QT.
Отметим, что деформации (3) отличаются от мер деформаций, входящих в классификацию Хилла в = (Un - I )/ и , n = 0,1,2, I - единичный тензор. Этот факт, по-видимому, был впервые четко отмечен в [12]. Различие мер деформации следует учитывать при сравнении расчетов по теории (1) с результатами других исследований.
2. Порядок решения задач
Плоским жестким будем называть зор скорости деформации в виде нагружение, когда задан тен-
D =
( D 1
D
D 1 D
I 0
л
.
Тогда, если рассматривать минимальный набор компонент тензора градиента деформации
|
к11 |
k 12 |
0 ) |
|
|
F = |
0 |
k 22 |
0 |
|
. 0 |
0 |
1V |
, который может породить тензор скорости деформации типа (4), то, пользуясь определениями градиента скорости деформации L и тензора скорости деформации D, нетрудно получить дифференциальные соотношения, связывающие компоненты тензоров F и D:
-
• • ••
п _ к 11 п _ к11 к 12 - к 11 к12
D , D , D??
11 1222
k11 2 k11 k22
Решая дифференциальные уравнения (6) с заданными компонентами D ij при естественных начальных условиях к 11 (0) = 1, к 22 (0) = 1 и к 12(0) = 1, можно вычислить компоненты градиента деформации (5).
Найденный тензор градиента деформации позволяет вычислить ортогональный тензор поворота Q по схеме, предложенной в [13]. Так как любой кососимметрический тензор K связан с ортогональным тензором поворота Q соотношением [13]
Q — I+Sinto к + k2oSto к 2, to to2
где
|
22 |
||||
|
' 0 |
-to 3 to 2 ' |
-to 3 — to 2 to 1 to 2 |
to 1 to 3 |
|
|
к — to 3 |
0 -to 1 , к 2 — |
22 to 1 to 2 —to 1 — to 3 |
to 2 to 3 |
|
|
<-to 2 |
to 1 0 J |
to 1 to 3 to 2 to 3 |
2 2 —to 2 — to 1 |
|
|
V |
7 |
222 to — ^ toi + to2 + tog ,
то, построив кососимметрический тензор, определим для найденного F вид ортогонального тензора поворота Q .
Отметим, что способ нахождения тензора K в работе [13] не указан. Рекомендуется использовать следующий вариант построения кососимметрического тензора:
K — ( F — FT )/2. (8)
Эта формула в общем случае определяет число независимых параметров тензора поворота Q . Количество параметров может иметь значение 1, 2 или 3.
Для рассматриваемого класса жестких нагружений (4) тензор Q имеет один свободный параметр, то есть
|
2 cos P |
sin P |
0 ) |
|
|
Q — |
— sin P |
cos P |
0 |
|
v 0 |
0 |
1 J |
Для конкретизации связи параметра р с историей нагружения необходимо использовать условие симметрии вычисленного по (9) правого тензора удлинения U — Q — 1 F — Q T F . Затем определяется тензор
• вихря О — QQT. Например, для тензора Q в форме (9) получаем
|
• |
Г 0 |
1 |
0 ) |
|
О=р |
- 1 |
0 |
0 |
|
. 0 |
0 |
0 J |
Предполагая, что тензоры напряжений и деформаций имеют вид
|
Г° 11 |
о 12 |
о 13 ^ |
Г£ 11 |
£ 12 |
£ 13 ^ |
|||
|
о - |
° 21 |
о 22 |
о 23 |
и £- |
£ 21 |
£ 22 |
£ 23 |
, (11) |
|
v° 31 |
о 32 |
о зз ; |
<£ 31 |
£ 32 |
£ 33 > |
подставим их в определяющие соотношения (1)-(2) при 2 G — 1 и а - 1 и получим рабочие определяющие уравнения в форме
о 11 - 2 о 12 P + D 11 - m оп + km £ 11
0 22 - 2 о 12 р + D 22 - m о 22 + km £ 22
0 12 -0 21 - P ( о 11 -о 22 ) + D 12 - m о 12 + km £ 12 ,
<
•
£ 11 — 2 £ 12 P + D 11 ,
•
£ 22 — - 2 £ 12 P + D 22 ,
•
£ 12 - £ 21 - -P ( £ 11
•
^^^^^^^в
£ 22 ) + D 12 ,
k 11 - k 11 D 11 , k 22 - k 22 D 22 ,
. k 12 - 2 k 22 D 12 + k 12 D 11 -
Здесь приняты следующие обозначения:
k = ^т, m - —, I £ \ =М1 +£ 22 + 2 £ 22 .
g + 1 т v
Остальные компоненты тензоров напряжений и деформаций равны нулю. Дополнительно (для наглядности вычислений) предполагалось, что тензоры (4) и (11) девиаторы.
3. Частные случаи и примеры
Задавая компоненты тензора скорости деформации (4), можно реализовать различные схемы жесткого нагружения. В частности, если компоненты тензора (4) - константы, то, например:
а) при D 11 = 0, D 22 = 0, D 12 = 1 реализуется простой сдвиг ( М -нагрузка). В этом случае решение уравнений (6) дает
|
7 1 |
2 t |
0 ) |
|
|
F = |
0 |
1 |
0 |
|
V 0 |
0 |
1 1 |
,
• 1
а схема (7)-(8) приводит к (9) и (10) с параметром р в форме р =----;
1 + t 2
б) для D 11 Здесь получаем
= 1 D 22
= 0,
D 12 = 0 - растяжение ( Р - нагрузка).
F =
e
V
et
и
•
р=
et ;
( e t )2 + (1 + e t )2 ;
в) если D 11 =
- 1, D 22 = 0, D 12 = 0 - сжатие ( Р - нагрузка), тогда
F =
7 - 1 e
V
- t
e
и
•
р=
- e t
( e - t )2 + (1 + e - t )2 ’
г) при D 11 = 0,
D 22
= 1,
D 12 = 0 имеем аналог внутреннего давле-
ния (р - нагрузка). Для этого варианта жесткого нагружения оказывается, что
0 ^
F =
V
et
и
•
р=
- et .
1 + (1 + e t )2 ;
д) для D 11 = q , D 22 = 0,
D 12 = 1 - пропорциональное нагружение
( Р-М -нагрузка). Для этого случая получаем
(eq +1)2 + -42 (eq q2
^^^^^^^в
; 1)2
-
е) если D 11 = 1, D 22 = 1, D 12 = 1 - общее плоское нагружение с постоянной «скоростью деформации» ( Р-М-р - нагрузка), тогда имеем
( e t e t (2 1 + 1) 0 )
F =
0 e t 0
и ₽ = 1 V
0 0 1
1 - - 1 1 2
\ J
I 2 J
Нетрудно по аналогии с пунктами а)-е) реализовать переменные, сложные и циклические нагружения. Например:
D 11 = + const, D 22 = 0, D 12 = 0 - циклическое растяжение-сжатие;
D11 - 0, D22 = 0, D12 - A sin(wt) - аналог периодически изменяющейся скорости деформации кручения;
D = 1
' Dn = 1, D 22 = 0, D 12 = 0, t < 1 0 , _ D 11 = 0, D 22 = 0, D 12 = 1, t > 1 0
аналог сложного нагружения
под углом 90 градусов в пространстве скоростей деформации (в терминах теорий малых неупругих деформаций).
На рис. 1, 2, 3, 4, 5, 6 приведены графики развития деформаций и напряжений в зависимости от параметра нагружения для простого сдвига (случай а), растяжения (вариант б), сжатия (схема в), «внутреннего давления» (случай г), пропорционального нагружения под углом 45° (вариант д и q = 1) и общего плоского нагружения (схема е) соответственно. Расчеты проведены при параметрах материала т = 1 и к = 0,1.
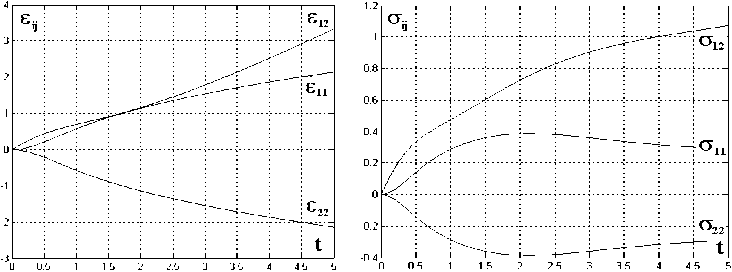
Рис. 1. Развитие деформаций и напряжений при простом сдвиге
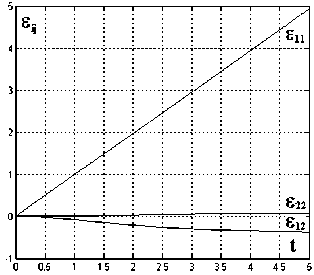
Рис. 2. Поведение деформаций и напряжений при растяжении
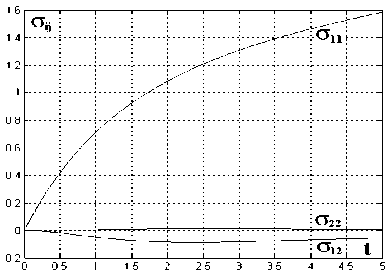
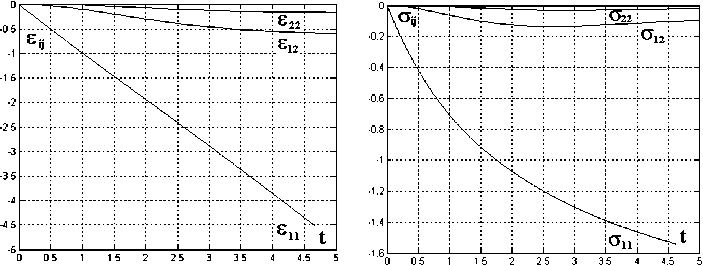
Рис. 3. Деформации и напряжения при сжатии
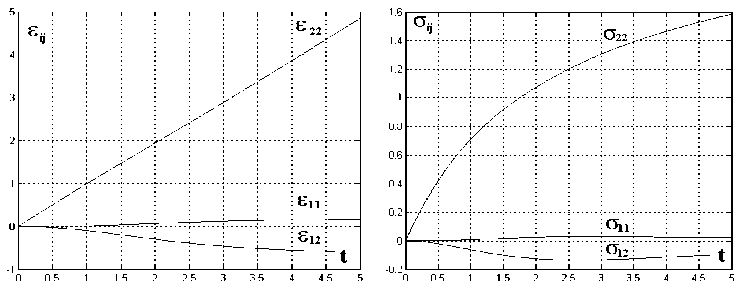
Рис. 4. Зависимость деформаций и напряжений от параметра нагружения при «внутреннем давлении»
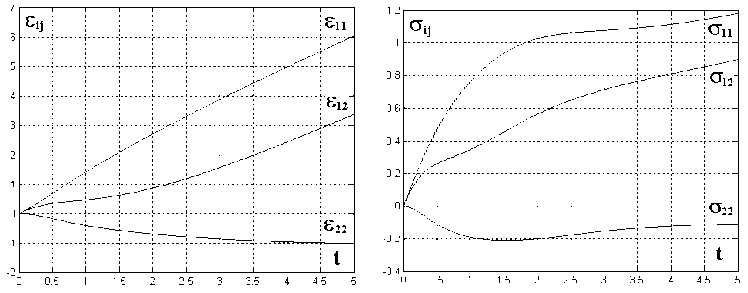
Рис. 5. Развитие деформаций и напряжений при пропорциональном нагружении под углом 45 градусов
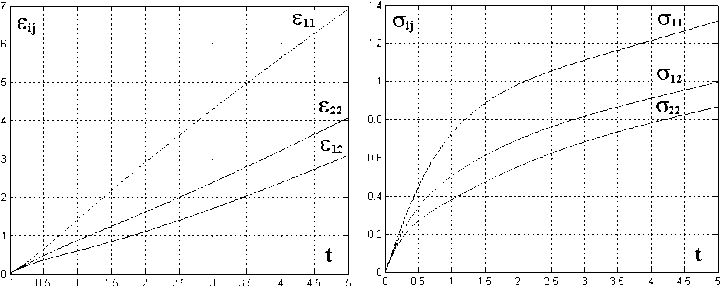
Рис. 6. Деформации и напряжения в общем плоском нагружении
Отметим монотонный характер развития всех компонент деформации и напряжения на рассматриваемых путях деформирования, появление осевых деформаций при простом сдвиге и сдвиговых деформаций при растяжении, сжатии и «внутреннем» давлении. Следует обратить внимание и на более высокий уровень сдвиговых напряжений оп по сравнению с напряжением ^ 22 в общем плоском случае нагружения.
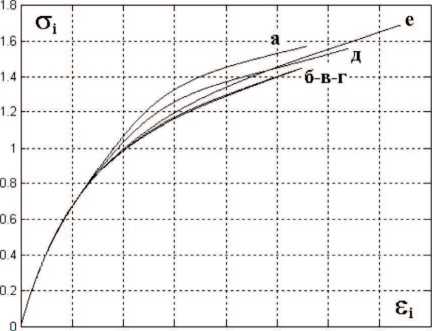
На рис. 7 приведены графики развития интенсивности напряжений от интенсивности деформаций для всех рассмотренных случаев. Очевидна зависимость от вида напряженного состояния, что не может быть получено в геометрически линейных вариантах теории.
0 1 2 3 4 5 6 7 8
Рис. 7. Зависимость интенсивности напряжений от интенсивности деформаций
Таким образом, приведенные выше примеры показывают, что при жестком плоском нагружении предлагаемый вариант эндохронной теории неупругости (1)-(2) способен описывать основные (и некоторые тонкие) эффекты поведения материалов, отмеченные экспериментаторами [14-15]. Отметим и новый четкий порядок производства вычислений по схеме (4)-(8).
Работа выполнена при финансовой поддержке РФФИ (грант № 10-01-00705).
