Решение задачи фильтрации при оптимальной настройке радиоотражающего сетеполотна трансформируемого рефлектора

Автор: Кабанов С. А., Митин Ф. В.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 4 т.22, 2021 года.
Бесплатный доступ
В данной работе рассматривается решение задачи фильтрации с применением фильтра Калмана при оптимальной настройке радиоотражающего сетеполотна. Рассмотрен крупногабаритный трансформируемый рефлектор космического базирования. В процессе выведения данной конструкции на заданную орбиту возможен уход реальной формы радиоотражающего сетеполотна от желаемой. Для обеспечения поточечной настройки активной части сетеполотна применяется тросо-вантовая система. Узловые точки радиоотражающей поверхности связаны с тыльной стороной сетеполотна через ванты. В них встроены актюаторы, позволяющие изменять длину вант. В качестве исполнительного органа выбран пьезоактюатор. Путем поточечной настройки пьезоактюаторов происходит натяжение сетеполотна до необходимой формы. Это позволяет обеспечивать качественную диаграмму направленности и высокий уровень сигнала при приёмепередаче данных. Приведены конкретные значения возмущающих воздействий. Для измерения напряжения питания на пьезоактюаторе и длины ванты применяются преобразователь напряжения и лазерный сканер. Определены возможные отклонения от расчётного начального положения. В соответствии с принципом разделения сперва решается задача оценивания, затем задача управления. Задача оценивания решается с использованием фильтра Калмана. Задача управления - с использованием алгоритма оптимального управления по иерархии целевых критериев. Представлены результаты численного моделирования. Показано успешное решение поставленной задачи при вариативных значениях шумов измерений и возмущающих воздействий. Приведено сравнение с траекториями, полученными с использованием различных алгоритмов оптимального управления.
Алгоритм последовательной оптимизации, крупногабаритный трансформируемый рефлектор, радиоотражающее сетеполотно, пьезоактюатор, математическая модель, моделирование
Короткий адрес: https://sciup.org/148323923
IDR: 148323923 | УДК: 517.977.5-629.783 | DOI: 10.31772/2712-8970-2021-22-4-577-588
Solution of the filtration problem with the optimal adjustment of the radio-reflecting net of a transformable reflector
In this paper, we consider the solution of the filtering problem using the Kalman filter with the optimal tuning of the radio-reflecting net. A large-sized transformable space-based reflector is considered. In the process of placing in orbit this structure, it is possible that the real form of the radio-reflecting net can deviate the desired one. To ensure point-to-point adjustment of the active part of the mesh, a cable-cable system is used. The nodal points of the radio-reflecting surface are connected to the back side of the net through cables. They have built-in actuators that allow you to change the length of the cables. A piezo actuator was selected as a control device. By point-by-point adjustment of the piezo actuators, the net is stretched to the required shape. This allows you to provide a high-quality radiation pattern and a high signal level when receiving and transmitting data. Specific values of the disturbing influences are given. To measure the supply voltage on the piezo actuator and the cable length, a voltage converter and a laser scanner are used. Possible deviations from the calculated initial position are determined. In accordance with the principle of separation, the estimation problem is solved first, then the control problem. The estimation problem is solved using the Kalman filter. The control problem is solved using the optimal control algorithm according to the hierarchy of target criteria. The results of numerical simulation are presented. The successful solution of the problem is shown with variable values of measurement noise and disturbing influences. Comparison with trajectories obtained using various optimal control algorithms is given.
Текст научной статьи Решение задачи фильтрации при оптимальной настройке радиоотражающего сетеполотна трансформируемого рефлектора
В настоящее время спутники связи активно используются для решения широкого круга задач [1; 2]. Одним из конструктивных способов реализации таких спутников является создание крупногабаритных космических рефлекторов [3–5]. Ведутся активные разработки в этой области. Данные конструкции позволяют работать одновременно в нескольких частотах, обладают большой областью засвечивания [6–9].
Рассмотрим реализацию крупногабаритной космической конструкции с применением вантовой системы для создания необходимой формы радиоотражающей поверхности рефлектора (рис. 1) [10–14]. Крупногабаритный трансформируемый рефлектор (КТР) состоит из космического аппарата (КА) 1 . К нему прикреплены разворачиваемые элементы, такие как солнечные батареи 2 , облучающая система 3 . Для обеспечения заданной диаграммы направленности штанга 4 выдвигает рефлектор 5 на необходимое фокусное расстояние. Отражающей поверхностью является сетеполотно 6 .
Для эффективного использования спутников связи необходимо поддержание точной формы радиоотражающего сетеполотна 6 . Это позволяет обеспечивать качественную диаграмму направленности и высокий уровень сигнала при приёме-передаче данных [15; 16].
Ввиду эксплуатации оборудования в космическом пространстве возникают периодические возмущающие воздействия на конструкцию рефлектора. Такие возмущения вызваны изменением температурного режима, наличием радиации, солнечного ветра [17; 18]. В процессе получения сведения о состоянии формы радиоотражающей поверхности необходимо учитывать влия- ние шумов измерений. Ввиду ограниченности запасов энергии на рефлекторе важным является минимизация энергетических затрат.
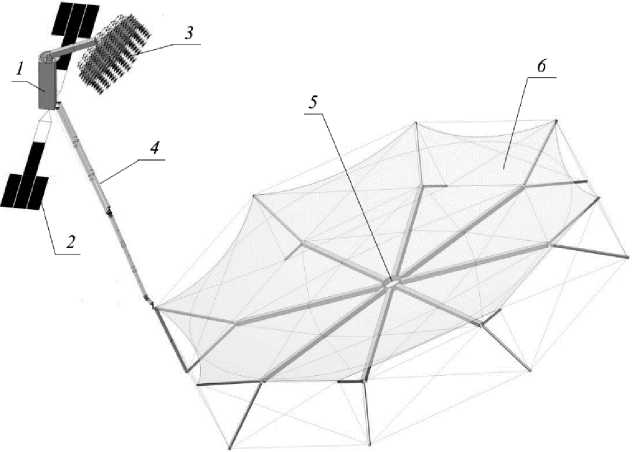
Рис. 1. Конструкция крупногабаритного трансформируемого рефлектора
-
Fig. 1. The design of the LTR (Large-sized transformable reflector)
Таким образом, необходимо осуществить точечную поднастройку сетеполотна при минимизации энергетических затрат, учитывая влияние шумов измерения и внешних возмущающих воздействий.
Математическое описание задачи
На рис. 2 представлена одна спица КТР в сечении, где 1 – спица, 2 и 3 – внешняя и задняя сетка, 4 – ванты, в которых установлены актюаторы. Необходимо, изменяя длину вант 4 с помощью актуаторов 5 , задать желаемую форму радиоотражающего сетеполотна 2 , обеспечив тем самым требуемую диаграмму направленности. В качестве актюаторов рассматривался пьезопривод. Желаемая форма задаётся в наземных условиях. В процессе доставки КТР на заданную орбиту и при раскрытии конструкции может происходить незначительное смещение реальной формы от желаемой. После развёртывания происходит сверка контрольных точек и на актюаторы 5 передаётся управляющее воздействие для изменения длины ванты 4 .
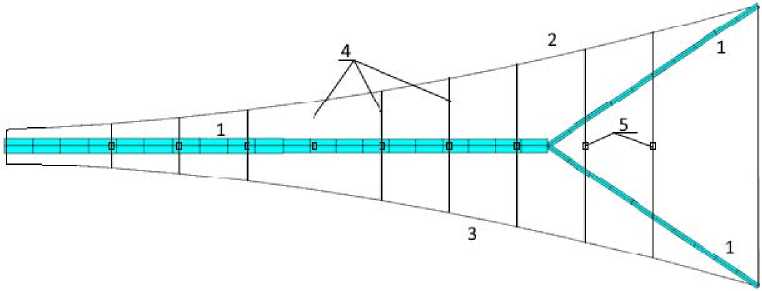
Рис. 2. Спица в сечении
-
Fig. 2. The spoke in cross section
В качестве актюатора для управления настройкой радиоотражающего сетеполотна выбран пьезоактюатор типа АПМ [19] с перемещением l max = 10 мм при допуске перемещения ±15 %. Для измерения напряжения на входе пьезоактюатора взят преобразователь напряжения измерительный ПИН-50-У-4/20-ДХ [19] с основной приведенной погрешностью не более 1,5 %. Для измерения изменения длины ванты используется лазерный сканер RangeVision Standard Plus [21] с точностью ±0,03 мм.
Система дифференциальных уравнений, описывающих пьезоэлемент с исполнительным органом на основании выводов А. А. Никольского [22], имеет вид X = f(X, u, t) + ξx, где X = (l V Uэ)T – вектор состояния, ξx = [ξx1 ξx2 ξx3]T – шум с интенсивностью Bx = diag(Bx1, Bx2, Bx3). Или в поэлементном виде l = V + ^ x 1,
. NKU + F - KJ - KV
V = ----c----у----- Д + ^ x 2 , (1)
mE eэ Uэ KпV
U, —+ ^,. , э C 0 R вт K д C 0 R вт K д C 0 K д x 3
где l – изменение длины (ход) актюатора; V – скорость выдвижения актюатора; N – количество элементов; K 0 – коэффициент обратного пьезоэффекта; U э – электрическое напряжение, приложенное к электродам актюатора; F c – статическое усилие; K у – коэффициент упругости; K д – коэффициент внутреннего демпфирования; e э – напряжение от источника электродвижущей силы; C 0 – ёмкость; R вт – внутреннее сопротивление; K п – коэффициент прямого пьезоэффекта; m Σ – суммарная масса, состоящая из массы самого пьезоактюатора и перемещаемой массы.
Общепринятая на практике постановка задачи совмещенного синтеза оптимального управления линейными системами опирается на теорему разделения. Согласно этой теореме, оптимальная система управления состоит из оптимального фильтра, формирующего оценки вектора состояния системы, и оптимального регулятора, определяющего управление уже в детерминированной постановке при предположении, что вектор состояния известен точно [23–25]. В данной статье для построения управления применяется фильтр Калмана и алгоритм последовательной оптимизации [26].
Измерению доступны длина выдвижения и напряжение на пьезоактюаторе. Уравнение наблюдения рассмотрим в виде
Z — H x + § z , (2)
где z = [ z 1 z 2 ]T, H = [1 0 1]T, ξ z = [ ξ z 1 ξ z 2 ]T – случайные процессы типа белого шума с интенсивностью B z = diag ( B z 1 , B z 2 ).
Оптимальную оценку можно получить с помощью фильтра Калмана
— V + Rn в ;, ( z , dt
^\
- l ) + R,3Bz 2 ( z2 - Uэ ), dV dt
NK 0 U э + F c - K у l - K д V
m E
+ R 21 BZ1
Z,
l ) + R 23 Bz 2 ( z 2
U ˆ э
,
dU ˆ э dt
e э
C 0 R вт K д
U ˆ э K п V
C 0 R вт K д C 0 K д
+ R 31 в ;,
z 1
^\ 1
l ) + R 33 Bz 2 ( z 2

R — AR + RAT - RHTB- 1HR + Bx, R (10) — R0, где
А =
|
0 |
i |
0 |
|
K у |
K д |
NK 0 |
|
m Е |
m Е |
m Е |
|
0 |
K п |
i |
|
C 0 K д |
C 0 R вт K д |
, Rnn ( t0 ) 9^хп, остальные элементы матрицы начальных ковариаций ошибок оценивания принимались равны ми нулю.
Постановка задачи управления
Для решения задачи управления применяется алгоритм оптимального управления по иерархии целевых критериев [26]. Помимо выполнения терминальных условий необходимо уменьшить энергетические затраты. Для случая управления пьезоактюатором - это мощность, выделяемая на пьезоактюаторе в процессе управления.
Управление вычисляется в виде и = и i + и 2, где и i и и 2 минимизируют критерии качества J i и J 2 соответственно
Ji = Vf i(X, tf ), tf
J2 = Vf2(X,tf ) + j[f,(X,t) + 0,5(и2 + и2)2к22]dt , t 0
где V fi = 0,5p i [ V ( t f ) - V f ]2, Уд = 0,5A X f T p к A X f ; f , = 0,5в 2 [ l ( t ) — l f ]2 + 0,5в з P э ( t ); P к = diag (p i , p2, р з , Р д ), Рь в 2 , в 3 , к 2 — заданные коэффициенты; A X f = X ( t f ) - X f , X f = ( l f V f U э f )T - заданное конечное значение вектора X в (i), Р э = U п • I = ( e э - U э ) 2 / R вт - электрическая мощность; U п - полное приложенное напряжение; I - ток. Подробно решение задачи управления в детерминированной постановке рассмотрено в работе [22].
Для оценки влияния возмущений на систему необходимо определить величины внешних возмущений и шумов измерений. Помимо внешних возмущений может наблюдаться изменение начального и конечного состояния, вызванное воздействиями на конструкцию при доставке рефлектора на орбиту.
Примем, что отфильтрованный шум измерений не превосходит ошибок измерительных датчиков. Внешние возмущения (влияние нагрузки, температуры окружающей среды, солнечное давление, радиация и т. п.) оказывают воздействие на весь вектор переменных состояния. Как правило, внешние возмущения случайны, некоррелированы и распределены равномерно в заданном диапазоне. В космическом пространстве внешнее влияние, оказываемое на рефлектор, является достаточно длительным и медленно нарастающим, поэтому на рассматриваемом интервале времени (не более i0 с) его можно считать квазистационарным. Возмущения примем равными ±i % от максимальных значений соответствующих переменных. В общем случае величины возмущений от нештатных ситуаций предугадать затруднительно.
Пьезоактюатор выдвигается из начального положения при значении l 0 = 0 мм и фиксируется при достижении заданной длины l f = 5 мм. Актюатор в начальном положении находится в состоянии покоя, соответсвенно линейная скорость V 0 = 0 м/с, напряжение U э 0 = 0 В. Конечное значение линейной скорости V f = 0 м/с. Пьезоактюатор преобразует электрическое напряжение в механическое перемещение [i9]. Когда к нему приложено электрическое напряжение, он деформируется, при снятии напряжения он приходит в исходное состояние. Примем конечное значение напряжения, исходя из ограничений, принятых на орбите U э f = i2 В. Время выдвижения t f = 4 с.
Моделирование
Для моделирования был выбран тонкопленочный пьезоэлектрический микроактюатор типа АПМ со следущими техническими характеристиками [19]: K 0 = 3,425∙10–8 Кл/м, m Σ = 0,125 кг, F c = 0 Н, K у = 7,611 Н/м, К д = 1,9, С 0 = 11,7∙10–5 Ф, R вт = 1,025∙102 Ом. Для осуществления выдвижения на заданную длину l f = 5 мм при ограничении на управление e э max = 12 В необходимо N = 305 слоёв.
Численное моделирование перевода системы из начального состояния x (0) = (0 0 0)T в конечное x ( t f ) = ( l f 0 U э f )T при минимизации энергии P э с отсутсвием перерегулирования по длине выдвижения l за время t f = 4 с проводилось методом Эйлера с шагом Δ t = 0,00001 с. Расчеты показали, что при значениях параметров критерия J 2 : ρ 1 = 104, ρ 2 = 108, ρ 3 = 0, ρ 4 = 0, β 1 = 0, β 2 = 0, β 3 = 0, k 2 = 1 алгоритм успешно решает поставленную задачу. Затраченная мощность на перевод системы из начального в конечное положение P э = 0,0075 Вт, при максимальном токе I = 0,0069 А.
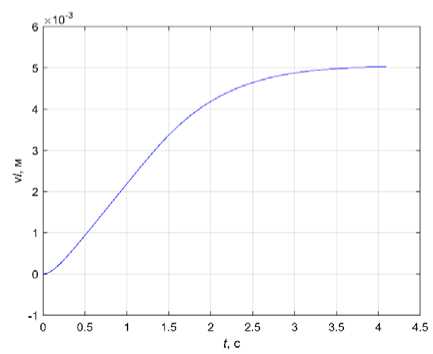
На рис. 3 представлены результаты моделирования, графики зависимостей l ( t ) и V ( t ) соответственно. Видно, что удалось решить поставленную задачу, т. е. перевести пьезоактюатор из начального состояние в конечное, переместив его активную часть на 5 мм при B x = diag (0,00075, 0, 0,12, 0).
На рис. 4 представлены ток и мощность при работе пьезоактюатора. Видно, что за время моделирования было затрачено около 8 мВт.
Принятые возмущения и шумы измерений не оказывают существенного влияния на переходные характеристики системы. Алгоритм успешно справляется с возмущениями и отклонениями начальных значений в диапазоне ± 10 %.
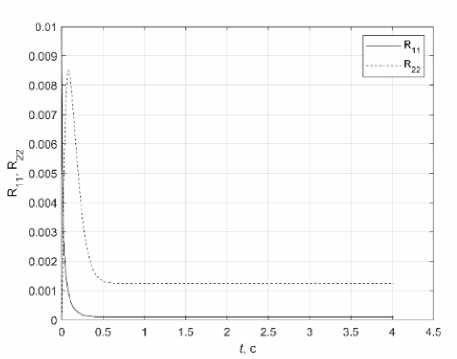
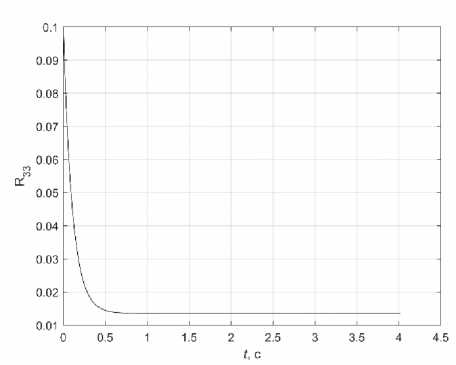
На рис. 5 представлены диагональные элементы матрицы ковариации при R 11 (0) = 0,01; R 22 (0) = 0,001; R 33 (0) = 0,1; B z = diag (0,0001, 0,18). Видно, что с течением времени они приходят к установившимся значениям. Также было проведено моделирование при разных уровнях шума. Фильтр Калмана отрабатывает их успешно.
Поскольку шумы измерений не оказывают сильного воздействия на управление, то для экономии энергии было предложено периодически отключать работу датчиков и текущее положение определять путем математического моделирования. Это позволило успешно решать задачу управления при меньших энергетических затратах. В моменты отключения датчиков не затрачивается энергия на их функционирование и передачу данных.
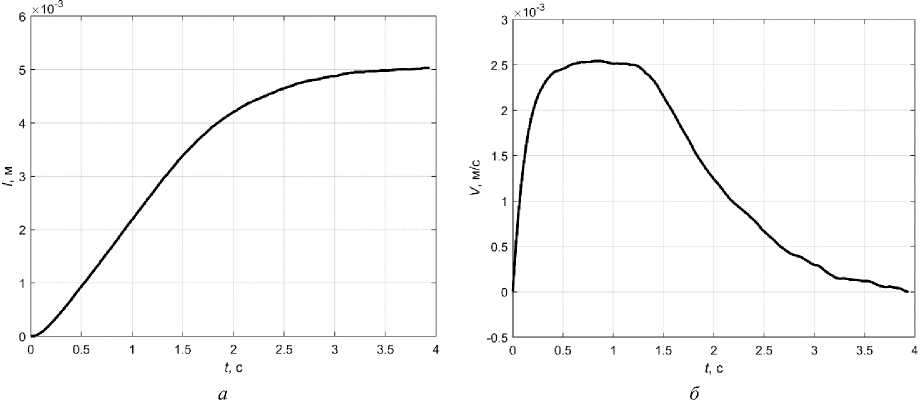
Рис. 3. Графики: a – l ( t ); б – V ( t )
Fig. 3. Graphics: a – l ( t ); b – V ( t )
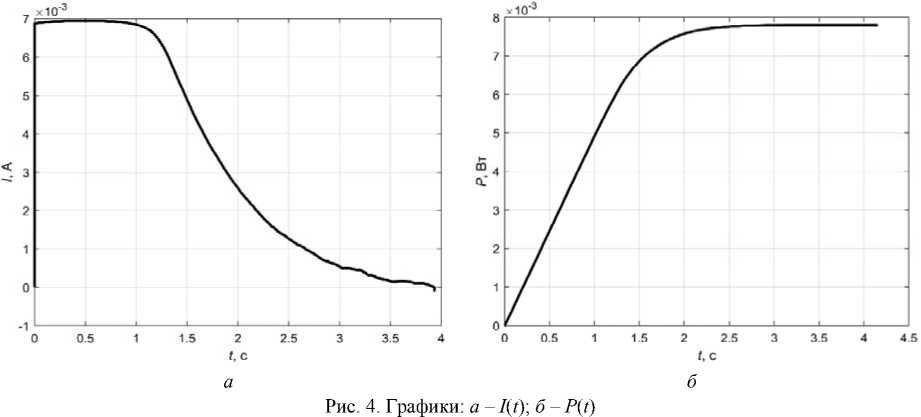
Fig. 4. Graphics: a – I ( t ); b – P ( t )
а
б
Рис. 5. Графики: а – R 11( t ), R 22( t ); б – R 33( t )
Fig. 5. Graphics: a – R 11 ( t ), R 22 ( t ); b – R 33 ( t )
а
б
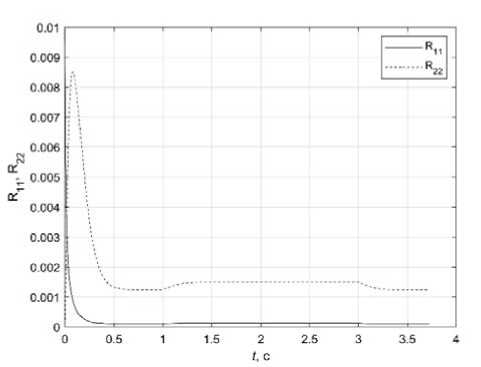
Рис. 6. Графики: а – R 11( t ), R 22( t ); б – l ( t )
Fig. 6. Graphics: a – R 11 ( t ), R 22 ( t ); b – l ( t )
На рис. 6, а представлены графики R 11 ( t ) и R 22 ( t ) при отключении измерений с 1 до 3 секунды. Рис. 6, б показывает оцененную величину l ( t ). Элементы ковариационной матрицы приходят к установившемуся значению при наличии наблюдений. На интервале отключения измерений при B Z1 = 0 и B z2 = 0 величины оценок и R ц( t ), R 22 ( t ) вычисляются с помощью фильтра в режиме прогноза.
При включении измерений на 3 с фильтр Калмана приводит оценку к оптимальному значению к 3,2 с. Математическое ожидание шума равняется нулю, поэтому при отключении измерений каких-либо существенных отличий в оценке измеряемых величин не наблюдается. Критическим является наличие внешних возмущений, так как за время отключения датчиков возможен уход математической модели от состояния реальной системы. Ввиду того, что процесс управления для рассматриваемой задачи занимает t f = 4 с, важно включать измерения при приближении к конечным значениям, что позволит оценить состояние системы и при необходимости скорректировать управление. При этом достаточно проводить измерение длины выдвижения пьезоактюатора l , включение датчика измерения напряжения U э0 = 0 незначительно повышает точность решения задачи.
Ошибки оценивания Δ l и Δ U э при работе фильтра Калмана с течением времени стремятся к нулю. При наличии внешних возмущений данные ошибки имеют математическое ожидание равное нулю и дисперсию, не превышающую дисперсию возмущений.
Заключение
Для решения задачи управления также применялись алгоритмы на основе принципа максимума Понтрягина с использованием численных методов Ньютона, Крылова – Черноусько, алгоритма коррекции параметров структуры управления [12; 23; 27]. Алгоритм последовательной оптимизации позволил на 12 % снизить энергетические затраты на управление. Применение ПИД-структуры управления увеличивало затраты электроэнергии на 27 % по сравнению с предлагаемым алгоритмом [28] при наличии перерегулирования.
Как видно, численное моделирование подтвердило возможность решения задачи оптимального управления стохастической моделью пьезоактюатора для настройки радиоотражающего сетеполотна КТР по неполным данным с использованием принципа разделения. Интервальное выключение измерений позволяет снизить энергозатраты на питание датчиков и обработку измерений. При этом более длительное включение датчиков в конечный момент времени приводит к более точному выполнению терминальных условий. Поэтому дополнительно возникает задача оптимизации интервалов наблюдения с целью минимизации энергетических затрат при высокоточном выполнении терминальных условий [29].
Представленные исследования доложены на XXII международной научной конференции «Системный анализ, управление и навигация» [30].
Список литературы Решение задачи фильтрации при оптимальной настройке радиоотражающего сетеполотна трансформируемого рефлектора
- Вовасов В. Е., Бетанов В. В., Герко С. А. Методика калибровки навигационного приемника ГЛОНАСС при использовании двухчастотных комбинаций измерений псевдопоследовательностей // Вестник Московского авиационного института. 2014. Т. 21, № 5. С. 137-144.
- Фёдоров А. В., Хоанг Ву. Т. Программный комплекс для проектирования алгоритмов управления движением сервисного модуля на геостационарной орбите // Вестник Московского авиационного ин-та. 2020. Т. 27, № 4. С. 192-205.
- Кага^еу Z. А. Deployment concept mechanical system of a radar antenna for space purposes // Сибирский журнал науки и технологий. 2017. Т. 18, № 4. С. 858-867.
- Xuelin D., Jingli D., Hong B., Guohui S., Deployment analysis of deployable antennas considering cable net and truss flexibility // Aerospace Science and Technology. 2018. Vol. 82-83. P.557-565.
- Wang H. Multifrequency Spaceborne Deployable Radiometer Antenna Designs // IEEE Aerospace and electronic systems magazine. 2020. Vol. 35, Ко. 5. P. 28-35.
- Deployable reflector system for satellite applications, in: 2005 SBMO / M. Terada, N. Bludworth, J. Moore et al. // IEEE MTT-S International Conference on Microwave and Optoelectronics. Brazil. 2005. P. 647-656.
- Li T. Deployment analysis and control of deployable space antenna // Aerospace Science and Technology. 2012. Vol. 18, Ко. 1. P. 42-47.
- Резник С. В., Чубанов Д. Е. Моделирование динамики раскрытия крупногабаритного трансформируемого рефлектора космической антенны из композиционного материала // Вестник Российского университета дружбы народов. Серия: Инженерные исследования. 2018. Т. 19, № 4. С. 411-425.
- Метод расчёта напряженно-деформированного состояния вантовооболочечных конструкций космических антенн рефлекторов / А. В. Бельков, С. В. Белов, А. П. Жуков и др. // Вестник Томского гос. ун-та. Математика и механика. 2019. № 62. С. 5-18.
- Разработка расчетно-экспериментального метода модального анализа / В. А. Бернс,
- B. Е. Левин, Д. А. Красноруцкий и др. // Космические аппараты и технологии. 2018. Т. 2, № 3(25). С. 125-133.
- Кабанов С. А., Зимин Б. А., Митин Ф. В. Разработка и анализ математических моделей раскрытия подвижных частей трансформируемых космических конструкций. Ч. I // Мехатрони-ка, автоматизация, управление. 2020. Т. 20, № 1. C. 51-64.
- Кабанов С. А., Зимин Б. А., Митин Ф. В. Разработка и анализ математических моделей раскрытия подвижных частей трансформируемых космических конструкций. Ч. II // Мехатро-ника, автоматизация, управление. 2020. Т. 21, № 2. C. 117-128.
- Kabanov S. A., Mitin F. V. Optimization of the stages of deploying a large-sized space-based reflector // Acta Astronautica, Special Issue on 6th SFS 2019. 2020. Vol. 176. P. 717-724.
- Development for petal-type deployable solid-surface reflector by uniaxial rotation mechanism / H. Huang, Q. Cheng, L. Zheng, Y. Yang // Acta Astronautica. 2021. № 178. P. 511-521.
- Тайгин В. Б., Лопатин А. В. Метод обеспечения высокой точности формы рефлекторов зеркальных антенн космических аппаратов // Космические аппараты и технологии. 2019. Т. 3. № 4 (30). С. 200-208.
- Kalabegashvili G. I., Bikeev E. V., Mathylenko M. G. Determination of the minimal reflecting surface points number required for assessment of large-size transformable antenna pattern deviation // Сибирский журнал науки и технологий. 2018. Т. 19, № 1. С. 66-75.
- Ишков В. Н. Воздействие солнечных активных явлений на околоземное космическое пространство и возможность их прогноза // Сложные системы. 2012. № 4 (5). С. 21-41.
- Влияние солнечной активности на магнитосферу Земли / Б. Б. Михаляев, С. Б. Дертеев, И. Ю. Лагаев, Т. Т. Осмонов // Актуальные проблемы современной физики и математики. 2017. C. 92-97.
- Панич А. Е. Пьезокерамические актюаторы. Ростов-на-Дону: ЮФУ, 2008. 159 с.
- ПИН-50-У-4/20-ДХ - преобразователь измерительный постоянного и переменного напряжения [Электронный ресурс]. URL: https://www.electronpribor.ru/catalog/850/pin-50-u-420-dh.htm (дата обращения: 10.10.2021).
- 3D-сканеры RangeVision [Электронный ресурс]. URL: https://printer-plotter.ru/ 3d-oborudovanie/3d-scanners/rangevision/?yclid=5975775935832053836 (дата обращения: 10.10.2021).
- Управление пьезоактюатором для настройки отражающей поверхности рефлектора космического базирования / С. А. Кабанов, Ф. В. Митин, А. И. Кривушов, Е. А. Улыбушев // Изв. вузов. Авиационная техника. 2018. № 4. С. 111-116.
- Справочник по теории автоматического управления / под ред. А. А. Красовского. М. : Наука, 1987. 712 с.
- Кабанов С. А. Оптимизация динамики систем при действии возмущений. М. : Физмат-лит, 2008. 200 с.
- Кабанов Д. С. Оптимальное управление ядерным реактором с учетом случайных возмущений // Приборостроение. 2009. № 5. С. 27-30.
- Кабанов С. А. Управление системами на прогнозирующих моделях. СПб. : Изд-во СПбГУ, 1997. 200 с.
- Кабанов С. А., Митин Ф. В. Оптимизация процессов раскрытия и создания формы трансформируемого рефлектора космического базирования // Изв. РАН. ТиСУ. 2021. № 2. С. 106-125.
- Кабанов С. А., Митин Ф. В. Оптимальное управление пьезоактюатором для настройки радиоотражающего сетеполотна космического рефлектора // Изв. вузов. Приборостроение. 2021. Т. 64, № 3. С. 183-191.
- Малышев В. В., Красильщиков М. Н., Карлов В. И. Оптимизация наблюдения и управления летательных аппаратов. М. : Машиностроение, 1989. 312 с.
- Кабанов С. А., Митин Ф. В., Шевчик А. А. Решение задачи фильтрации при оптимальной настройке радиоотражающего сетеполотна трансформируемого рефлектора // Системный анализ, управление и навигация : тез. докладов. М. : Изд-во МАИ, 2021. С. 170-171.
