Результаты отработки алгоритмов функционирования и перспективы применения комбинированных радиолокационных измерителей в составе бортового комплекса управления полетом летательного аппарата

Автор: Пономарев Леонид Иванович, Калмыков Николай Николаевич, Кац Марк Израилевич, Иванов Юрий Александрович, Важенин Владимир Григорьевич, Вербицкий Виталий Иванович, Дядьков Николай Александрович, Мельников Сергей Александрович
Статья в выпуске: 23 (240), 2011 года.
Бесплатный доступ
Приводятся результаты отработки алгоритмов функционирования комбинированного радиолокационного измерителя (КРИ), измеряющего высоту полета и составляющие вектора скорости летательного аппарата. КРИ используется в составе бортового комплекса управления в качестве датчика внешней информации для коррекции бесплатформенной инерциальной навигационной системой, управления движением в вертикальной плоскости и в КЭНС по рельефу местности. Результаты летных испытаний КРИ на борту самолета ЯК-52 подтвердили достижимость требуемых точностных характеристик и показали перспективность применения КРИ для решения указанных задач.
Радиолокационный измеритель, высота полета, бортовой комплекс управления
Короткий адрес: https://sciup.org/147155282
IDR: 147155282 | УДК: 623.466.55
Results of the development of algorithms and prospects of combined radar use in the onboard flight control systems of aircraft
The article presents the results of the development of algorithms of combined operation of the radar, which measures the altitude and velocity components of the aircraft. Radar is used in the onboard control systems as a sensor of external information to correct strapdown inertial navigation system, traffic control in the vertical plane and terrain navigation system. The results of flight tests aboard YAK-52 confirmed the accessibility of required accuracy characteristics and showed promise to solve these problems.
Текст научной статьи Результаты отработки алгоритмов функционирования и перспективы применения комбинированных радиолокационных измерителей в составе бортового комплекса управления полетом летательного аппарата
Комбинированный радиолокационный изме-ригель (КРИ) предназначен для измерения геометрической высоты полета, составляющих вектора скорости летательного аппарата (ЛА) в связанной системе координат, средней высоты морских волн и формирования признака перехода вода/суша. КРИ используется в составе бортового комплекса управления (БКУ) в качестве датчика внешней информации для коррекции бесплатформенной инерциальной навигационной системой (БИНС), управления движением в вертикальной плоскости и в корреляционно-экстремальной навигационной системе (КЭНС) по рельефу местности.
В основу измерения составляющих вектора скорости летательного аппарата положен корреля-ционный метод, который базируется на вычислении и оценке параметров взаимных корреляцион-ных функций (ВКФ) сигналов, рассеянных подстилающей поверхностью и принятых на три при - емных антенны, расположенных в плоскости OXZ связанных осей ЛА [1] с расстоянием между фазовыми центрами, не превышающим интервал пространственной корреляции отраженного сигнала.
На рис. 1 изображена антенная система КРИ, которая содержит две приемных антенны (в точках A и B ) и одну приемопередающую (в точке O ). Пространственные параметры X ) и Z о рассчитывались , исходя из заданных диапазонов измеряемых составляющих вектора скорости и типов подсти-лающей поверхности.
В процессе отработки КРИ был произведен большой объем летных испытаний как в составе БКУ изделия, так и автономно на борту самолета ЯК-52. Для обеспечения возможности записи сигнала , отраженного от подстилающей поверхности, был разработан блок сохранения информации БСИ-1, выполнено его программно-аппаратное сопряжение с КРИ, обеспечивающее штатное

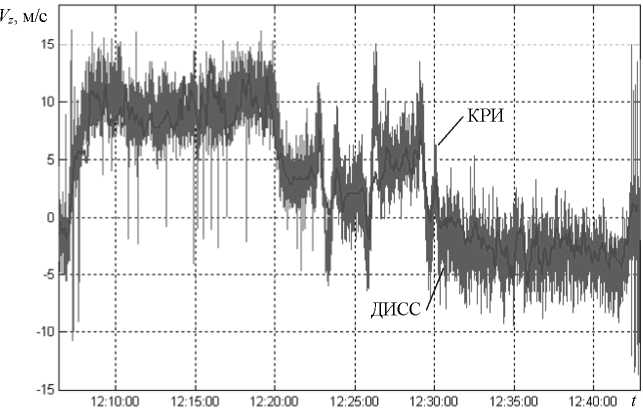
Рис. 2. Результат измерения поперечной составляющей скорости
функционирование прибора в процессе летных испытаний. Созданная математическая модель позволила производить послеполетную обработку записанного сигнала и тем самым вырабатывать методы и алгоритмы обработки сигнала, направ-ленные на повышение точностных характеристик КРИ . Подробное описание летной лаборатории на базе самолета ЯК-52 приведено в работе [2].
Для сравнения результатов измерения состав-ляющих вектора скорости в составе летной лабо-ратории использовался доплеровский измеритель составляющих скорости ДИСС Д-005. Сопостави-тельный анализ работы КРИ и ДИСС показал, ЧТО скоростной канал КРИ имеет погрешности изме-рения не более, чем у ДИСС, а в некоторых случа-ях и менее (например, при кренах ЛА). На рис . 2 представлены результаты измерения поперечной составляющей скорости в одном из полетов.
Одним из факторов, влияющих на точность измерения составляющих вектора скорости, явля-ется положение сигнального строба скоростного канала КРИ относительно зондирующего импуль-са, отраженного от подстилающей поверхности. С одной стороны, на максимуме импульса обеспе-чивается максимальная мощность флюктуаций сигнала. С другой ‒ доплеровские флюктуации на срезе импульса имеют более широкий спектр, сиг-нал более информативен,и, следовательно, такое положение сигнального строба является предпоч-тигельным. В то же время при полете над поверх-ностями с узкой диаграммой обратного рассеяния (ДОР) отраженный импульс обужается, и сигналь-ный строб может попасть в малоинформативную область с недопустимо малым отношением сиг-нал/шум, что приведет к снятию исправности ско-ростного канала КРИ.
Для решения этой проблемы был разработан алгоритм автоматической подстройки положения сигнального строба скоростного канала методом «ВИЛКИ», проиллюстрированный на рис. 3. Данный алгоритм был опробован в процессе летных испы-ганий как на самолете ЯК-52, так и в составе БКУ, и доказал свою эффективность.
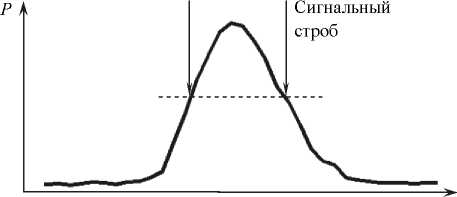
t
Рис. 3. Положение сигнального строба скоростного канала КРИ л. . ,н. . ,м. . ,ю.А. Иванов,
В . Г . , В . И . , К . . Дядьков, С . . Мельников
Изначально для оценки положения максиму-мов ВКФ сигналов, принятых на разнесенные ан-тенны, в программном обеспечении (ПО) КРИ бы-ла реализована квадратичная аппроксимация ВКФ. По результатам послеполетной обработки сигна-ЛОВ, записанных блоком сохранения информации БСИ-1, с целью уменьшения погрешностей изме-рения составляющих вектора скорости был выра-ботан наиболее оптимальный вид аппроксими-рующей функции, в лучшей степени повторяющей форму ВКФ и слабо зависящей от искажения фор-мы ВКФ. Эго квадратичная аппроксимация лога-рифма ВКФ с треугольной весовой функцией.
Традиционный подход к измерению проекций вектора путевой скорости заключается в измере-нии транспортных запаздываний между сигнала-ми, принятыми на три разнесенные антенны. Эго обусловлено простым видом получаемых выраже- НИЙ. В случае антенной системы КРИ (СМ . рис . 1)
:
V _ ^макс 12 ~ ^макс 23
x X 0
т' -т'
макс 23 макс 12
Z 0
V z

ГДе Т макс 12 ‒ транспортное запаздывание между сигналами, принятыми антеннами в точках Aи O; Г макс 23 ‒ транспортное запаздывание между сигна-лами, принятыми антеннами в точках Oи B.
Данный метод обеспечивает хорошую точ-ность измерения продольной составляющей Vx вектора скорости. Однако влияние поверхности и разного рода декоррелирующих факторов могут в некоторых случаях приводить к повышенным по-грешностям в измерении поперечной составляю-щей Vz вектора скорости.
На рис . 4 изображены взаимные корреляци-онные функции сигналов, принятых антенной сис-темой КРИ при движении ЛА с углом сноса. в зависимости от значения угла сноса изменяются не только положения максимумов ВКФ, но и их ве - ЛИЧИНЫ .
Реализация метода измерения поперечной со-ставляющей вектора скорости по разности макси-мумов ВКФ в ПО КРИ позволила уменьшить ошибки измерения в несколько раз.
В сил)7 физических принципов, заложенных в основу построения КРИ, измерение составляющих вектора скорости производится относительно под-стилающей поверхности. Очевидно , что движение подстилающей поверхности, в том числе и неяв-ное, отражается на результатах измерения.
В публикации [3] описан механизм возникно-вения орбитального течения, вызванного круго-выми движениями частиц воды при распростране-нии волны по ее поверхности (рис. 5), и приведена эмпирически полученная зависимость скорости орбитального течения от скорости ветра у поверх-ности. Разработанная методика учета данной зави-
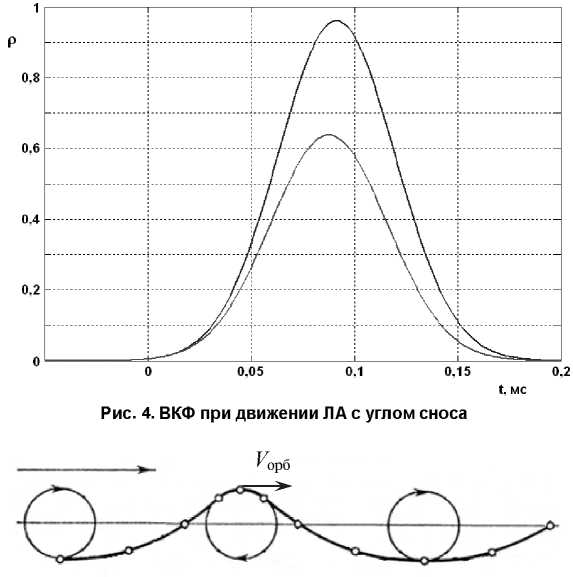
Рис. 5. Траектория отражающих частиц при волновом движении
симости при анализе результатов летных испыта-ний КРИ в составе БКУ позволила заметно уменьшить ошибки измерения составляющих век-тора скорости.
Дальнейшее повышение точности определе-ния местоположения ЛА обусловлено наличием в КРИ оценок как задержки, так и интенсивности отраженного сигнала и пространственной корре-ляции их флюктуаций, получаемых в процессе вы-числения составляющих скорости. Это позволит формировать оценки двух полей ‒ рельефа и радио-яркости и обнаруживать так называемые линейные ориентиры ‒ дорожную и речную сеть, железнодо -рожное полотно, переходы вода/суша и т. .
Реализация этих алгоритмов в КРИ с исполь-зованием имеющихся резервов повышения произ-водительности вычислителя позволит существенно повысить точность коррекции и соответствует ус-тановившейся мировой тенденции построения БКУ.
Список литературы Результаты отработки алгоритмов функционирования и перспективы применения комбинированных радиолокационных измерителей в составе бортового комплекса управления полетом летательного аппарата
- Боркус, М.К. Корреляционные измерители путевой скорости и угла сноса летательных аппаратов/М.К. Боркус, А.Е. Черный. -М.: Сов. радио, 1973. -169 с.
- Использование реального сигнала для анализа природы погрешностей скоростного канала комбинированного радиотехнического измерителя (КРИ)/В.И. Вербицкий, Н.Н. Калмыков, С.А. Мельников, В.В. Соловьев//II Всерос. науч.-техн. конф. «Радиовысотометрия-2007»: сб. тр. -Каменск-Уральский: ОАО «УПКБ «Деталь», 2007. -С. 83.
- Колчинский, В.Е. Автономные доплеровские устройства и системы навигации летательных аппаратов/В.Е. Колчинский, И.А. Мандуровский, М.И. Константиновский; под ред. В.Е. Колчинского. -М.: Сов. радио, 1975. -432 с.
