Робастная нелинейная система возбуждения синхронного генератора: интегральная адаптация

Автор: Кузьменко Андрей Александрович, Синицын Александр Сергеевич
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 1 (76) т.14, 2014 года.
Бесплатный доступ
Показано применение нового системно-кибернетического подхода к управлению синхронными генераторами энергосистем с учётом их нелинейностей, многомерности и многосвязности. Основным объектом исследования данной работы является нелинейная модель синхронного генератора, работающего на сеть большой мощности. Представлен синергетический синтез нелинейного адаптивного закона управления возбуждением синхронного генератора энергосистемы в соответствии с принципом интегральной адаптации синергетической теории управления. Синтезированный закон управления обеспечивает выполнение технологических инвариантов - стабилизацию терминального напряжения и синхронную работу с сетью, подавление параметрического возмущения (параметрическую робастность). Полученные результаты показали свою эффективность в задаче повышения устойчивости энергосистемы. Сравнительный анализ области устойчивости с синергетическим законом и с традиционным регулятором возбуждения синхронного генератора проиллюстрировал существенное преимущество синергетического подхода.
Синхронный генератор, система возбуждения, параметрическая неопределённость, интегральная адаптация, синергетическая теория управления
Короткий адрес: https://sciup.org/14250039
IDR: 14250039 | УДК: 681.5.013 | DOI: 10.12737/3514
Robust nonlinear synchronous generator excitation system: integral adaptation
The application of a new system-cybernetic approach to the power system synchronous generator control with regard to their nonlinearity, multidimensionality, and multicoupling, is shown. The main study subject is a nonlinear model of the synchronous generator operating for a high power network. A synergistic synthesis procedure of the nonlinear adaptive control law for power system synchronous generator excitation in accordance with the principle of the integrated adaptation of synergetic control theory is presented. The synthesized control law provides the implementation of technological invariants, i.e. stabilization of terminal voltage, and a synchronous operation with the network, suppression of parametric perturbation (parametric robustness). The obtained results have shown their efficiency in improving power system stability problem. A comparative analysis of the stability area with the synergistic law, and with the conventional synchronous generator excitation controller has illustrated the significant advantage of the synergetic approach.
Текст научной статьи Робастная нелинейная система возбуждения синхронного генератора: интегральная адаптация
Современные сложные технические объекты и системы функционируют в условиях существенной неопределённости внутренней и внешней среды. Более того, эти условия могут носить экстремальный характер, угрожающий нормальному функционированию соответствующего технического объекта или его подсистем. К таким объектам, в частности, относятся синхронные генераторы (СГ) энергосистем. На СГ постоянно действуют внешние возмущения, зачастую выводящие систему далеко от номинального режима. Например, резкие скачки потребляемой мощности, замыкания на линиях электропередач или их обрыв и т. п. В СГ неопределённость внутренней среды связана с текущим изменением параметров его подсистем. Указанные параметры могут изменяться как в определённых интервалах, не приводящих к нарушению технологических режимов объектов, так и выходить за допустимые диапазоны, приводящие к аварийным условиям функционирования указанных сложных объектов и их подсистем. Это приводит нас к пониманию проблемы синтеза робастных законов управления и определяет необходимость построения адаптивных систем управления с целью повышения устойчивости системы возбуждения СГ за счёт уменьшения неопределённостей реального процесса (адаптивности к изменению параметров и действию внешних возмущений).
Обзор состояния в области адаптивного управления энергосистемами. Для линейных систем адаптивное управление, как правило, строится в соответствии с классическими методами линейной теории адаптивного управления [5‒8]. Но традиционный подход, основанный на линейных моделях объектов энергосистем, пригоден лишь в режимах номинальной работы энергосистемы, так как линеаризованная модель является адекватной только в области малых отклонений от номинального режима. В [9] отмечается, что для энергосистем использование линейных регуляторов не может гарантировать устойчивость исходной нелинейной энергосистемы, подверженной внешним и параметрическим возмущениям. В настоящее время адаптивность и робастность систем управления обеспечивается за счёт совместного использования традиционных линейных регуляторов и методов Hm -управления, методов теории нечётких систем управления или искусственных нейронных сетей. Однако в нечётких системах возникает проблема «проклятия размерности» — число правил пропорционально степени числа входных переменных (размерности системы). Это в свою очередь ведёт к «трудности восприятия и объяснения». К тому же «в большинстве работ настройки [линейных] регуляторов выбираются на основании опытных знаний экспертов, общих представлений о физике протекания процессов или методом проб и ошибок. Подобный подход не гарантирует нахождения оптимальных настроек регулятора и в сильной степени зависит от человеческого фактора» [1].
В [9‒11] к современным нелинейным методам теории управления, используемым для построения робастных систем управления объектами энергосистем, в том числе систем возбуждения СГ, относятся прямой метод Ляпунова, метод линеаризации обратной связью, метод пассифика-ции, метод энергетических функций др. Авторы предлагают использовать скользящие режимы для обеспечения робастности энергосистемы к возмущениям [9].
Синерго-кибернетический подход базируется на обеспечении устойчивости движения объекта за счёт соответствующего синтеза нелинейных законов робастного управления, обеспечивающих максимальную область асимптотической устойчивости замкнутой системы «гарантирующий регулятор — объект». Для решения данной задачи синтеза следует применять основной метод синергетической теории управления (СТУ) — метод аналитического конструирования агрегированных регуляторов (АКАР), развитый научной школой Южного федерального университета и нашедший обширное применение в различных областях современной техники — авиации, энергетике, электромеханике и т. д. [1‒4, 12].
Для реализации системно-кибернетического подхода к построению робастных систем управления СТУ предлагает следующие основные подходы [1‒4]:
-
1) для идентификации параметрических и/или внешних возмущений применяются соответствующие синергетические нелинейные наблюдатели возмущений (ННВ). В этом случае синтезируемые методом АКАР законы управления дополняются подсистемой наблюдения, осуществляющей динамическую оценку неизмеряемых возмущений и их подавление. Более подробно использование ННВ для объектов энергосистем представлено в [1, 13, 14];
-
2) использование принципа интегральной адаптации, когда влияние параметрических и/или внешних возмущений на функционирование системы подавляется за счёт построенных нелинейных законов управления с особым образом введёнными интеграторами.
Постановка задачи и синтез закона управления. В данной работе выполнен синтез нелинейного адаптивного закона управления возбуждением СГ, обеспечивающего:
-
• заданное напряжение на выводах СГ U t = U 0 и его синхронизм в номинальном режиме работы
ш = Ш о ;
-
• возврат СГ в номинальный режим после аварийных ситуаций, вызванных возмущениями;
-
• устойчивость работы СГ при параметрическом возмущении.
В качестве объекта управления рассматривалась модель СГ, работающего на систему неограниченной мощности с чисто активной нагрузкой, которая в относительных единицах в системе синхронно вращающихся осей d, q имеет вид x (t) = -c1 x1 + с2x3 + с3x4x2 + с4 sin x5 - f1 x1M + f2x3M;
x 2 ( t ) = с 3 x 4 x 1 - с 5 x 2 - с 4 cos x 5 - f 3 x 2 M ;
x 3 ( t ) = - c 6 x 3 + c 7 x 1 + b 1 u; (1)
x 4 ( t ) = c 8 - c 9 x 3 x 2 + c 10 x 1 x 2 - c 11 x 4 ;
x5 (t) = x4 - Ш0, где x1, x2 — потокосцепление по оси d и q соответственно; x3 — ЭДС ротора СГ; x4 — частота вращения ротора; x5 — электрический угол СГ; M — параметрическое возмущение, выражающееся в изменении сопротивления линии электропередачи; b1,ci,fj — постоянные параметры; u — ЭДС возбуждения СГ, которая в данной модели является управлением [15].
В основе синтеза требуемого закона управления для (1) был использован принцип интегральной адаптации, основанный на методе АКАР синергетической теории управления [1‒4]. При этом полагалось, что параметрическое возмущение — это кусочно-постоянная функция с неизвестной заранее амплитудой. В соответствии с принципом интегральной адаптации необходимо расширить исходную модель (1) дополнительным дифференциальным уравнением — моделью кусочно-постоянного возмущения, в структуру которого входит желаемый инвариант:
z ( t ) = a ( U t - U 0 ) + в ( x 4 - ш ) , (2)
здесь α, β — постоянные параметры.
Правая часть уравнения (2) структурно представляет собой желаемый технологический инвариант — постоянное желаемое значение терминального напряжения, которое описывается выражением [15]:
Ut = V U + ud, где Ud = -U„ sin x5 + s1 x1 - s2x3, Uq = U„ cos x5 + s3x2.
Расширенную модель СГ получим, добавив уравнение (2) в (1) и заменив слагаемые с M на z :
x 1 ( t ) = - c 1 x 1 + с 2 x 3 + с 3 x 4 x 2 + с 4 sin x 5 + z ;
x- 2 ( t ) = с 3 x 4 x 1 - с 5 x 2 - с 4 cos x 5 + z ;
^^ 3 ( t ) = - c 6 x 3 + c 7 x i + b i u ; (3)
^^ 4 ( t ) = c 8 - c 9 x 3 x 2 + c io x i x 2 - c ii x 4 ;
-x 5 ( t ) = x 4 - ш о ;
;? (t) = a (Ut - U0) + p (x4 - too), где U0 , ω0 — постоянное желаемое значение терминального напряжения и номинальная частота вращения ротора соответственно.
Согласно процедуре метода АКАР составляется макропеременная, реализующая желаемый технологический инвариант:
Ф = a ( U t - U 0 ) + в ( x 4 - to o ) + y z , (4)
здесь γ — постоянный параметр.
Вводим основное функциональное уравнение метода АКАР T ip ( t ) + Ф = 0,
которое запишем с учётом (4) и (3). Разрешив (5) относительно управления u , получим искомое управление:
1 s 2 b 1
- U „ ( cos x 5 + sin x 5 ) ( x 4 - w0 ) + s 3 ( c 3 x 4 x 1 - c 5 x 2 - c 4 cos x 5 + z ) +
+ S 1 ( - c 1 x 1 + c 2 x 3 + c 3 x 4 x 2 + c 4 sin x 5 + z ) + s 2 c 6 x 3 - s 2 c 7 x 1 +
+ ^ в ( c 8 - c 9 x 3 x 2 + c 10 x 1 x 2 - c 11 x 4 ) + U Y ( a ( U t - U 0 ) + в ( x 4 - “ 0 ) ) +
+ U T ( a ( U t - U 0 ) + p ( x 4 - to o ) + Y z )
здесь z — динамическая переменная, получаемая из (2):
z = f ( k ( Ut - U 0 ) + k 2 ( x 4 - “ 0 ) ) d .
Для выполнения численного моделирования использовалась среда MATLAB. Для качественной демонстрации закона (6) было произведено моделирование замкнутой системы (3) с ПИД-регулятором:
u = k A U + k — + k f A Udt , p d dt i
где A U = Ut - U 0 — отклонение терминального напряжения от заданного. Параметры настройки регулятора (7) были получены с помощью утилиты Simulink Response Optimization пакета MATLAB для исходной нелинейной системы (1) по желаемому переходному процессу терминального напряжения.
Параметры системы (1): с 1 = 10,516; c 2 = 16,529; c 3 = 376,14; c 4 = 358,14; c 5 = 28,465; c 6 = 1,176; c 7 = 1,007; c 8 = 0,211; c 9 = 0,864; c 10 = 0,732; c 11 = 0,021; f 1 = 441,47; f 2 = 742,15; f 3 = 1414,6; U „= 0,95; s 1 = 0,023; s 2 = 0,039; s 3 = 0,074; а параметры законов управления (6), (7): в = - 24; у = 0,125; k = к 1 = 1; к2 = 2; U 0 = 1; м0 = 1; a = 1,5; T = 0,001; k p = 1; k i = kd = 80.
На рис. 1‒4 представлены результаты моделирования замкнутой системы (1) с различными законами управления. На графиках сплошной линией показаны результаты моделирования с синергетическим законом управления (6), а пунктирной линией — с законом (7). При моделировании замкнутой системы действует параметрическое возмущение M , моделирующее короткое замыкание на линии [13]:
0,
t < 5;
M = ^
- 0,02, 5 < t < 5,2;
0,012, t > 5,2.
На основе данных моделирования можно сделать вывод, что синтезированный синергетический закон (6) полностью выполняет предъявляемые к нему требования. Кроме того, он позволяет выдерживать заданный режим СГ, затрачивая меньше энергии, что видно из рис. 4. Синергетический закон способен обеспечить более быстрое гашение параметрических возмущений, нежели классический ПИД-регулятор, при этом отсутствуют колебания терминального напряжения и частоты вращения ротора в переходном режиме.
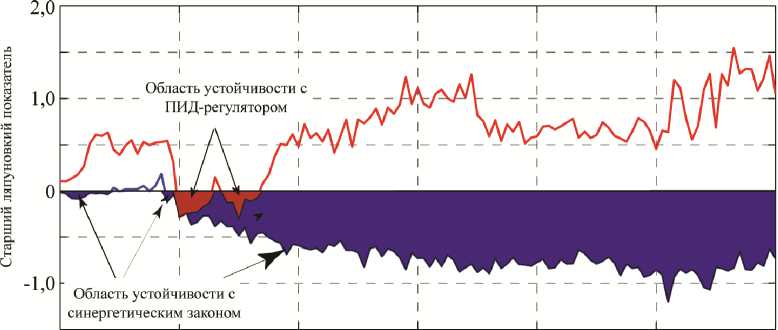
В силу того, что при синтезе закона (6) использовались уравнения исходной системы (3), он способен обеспечивать устойчивость системы при больших значениях возмущения по сравнению с ПИД-регулятором. Для анализа устойчивости произведем расчёт старшего показателя Ля- пунова при различных значениях возмущения M . Как известно, показатели Ляпунова являются численной оценкой эволюции малого возмущения в пространстве состояния системы [16]. Следовательно, если самый большой из спектра показателей Ляпунова является отрицательным, то и все остальные показатели будут отрицательными. Из чего следует, что возмущения в системе угасают по всем направлениям. Это говорит об устойчивости синтезированной системы [16].
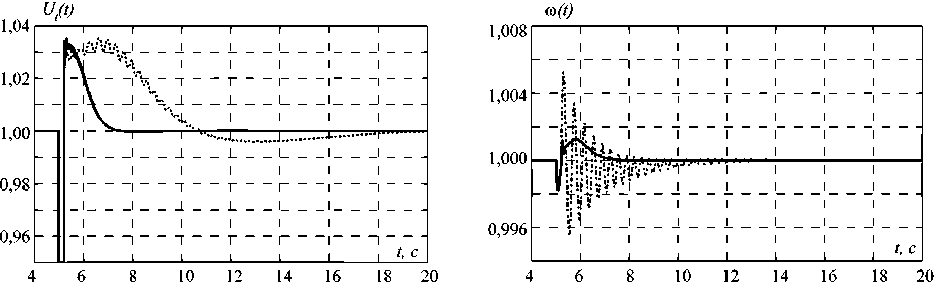
Рис. 1. Терминальное напряжение СГ
Рис. 2. Частота вращения ротора СГ
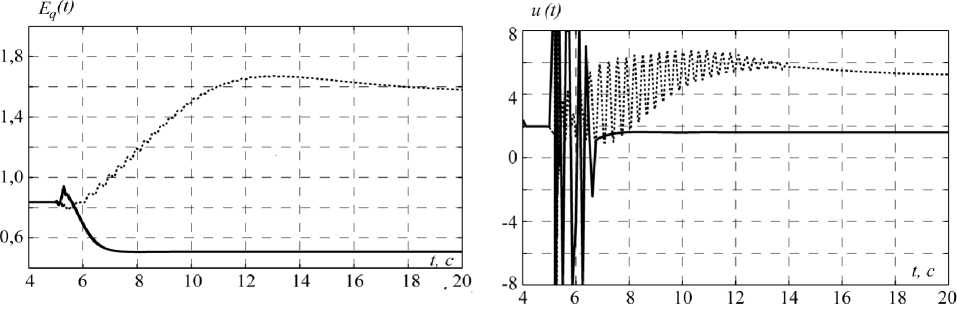
Рис. 4. ЭДС возбуждения СГ — управление
Рис. 3. ЭДС ротора СГ
На рис. 5 показаны графики изменения старшего показателя Ляпунова для исходной системы (1) с синергетическим законом (6) и ПИД-регулятором (7). Для устойчивости системы требуется, чтобы старший показатель принимал отрицательное значение. Из рис. 5 видно, что синергетический закон обеспечивает значительно большую область устойчивости, чем ПИД-регулятор (7).
■0,02 0 0,02 0,04 0,06 0,08 0,1
Возмущение
Рис. 5. Область устойчивости системы (1)
Заключение. Синтез методом АКАР на основе введения инвариантных многообразий в систему, вкупе с введением интегральной составляющей для подавления возмущений, предоставляет возможность синтезировать законы, обеспечивающие более точное, быстрое, экономичное, а главное — надёжное управление, нежели классические линейные законы. В целом, это обеспечивает повышение устойчивости энергосистемы.
Список литературы Робастная нелинейная система возбуждения синхронного генератора: интегральная адаптация
- Колесников, А. А. Новые технологии проектирования современных систем управления процессами генерации электроэнергии/А. А. Колесников, Г. Е. Веселов, А. А. Кузьменко. -Москва: Издательский дом МЭИ, 2011. -280 с.
- Колесников, А. А. Синергетическая теория управления/А. А. Колесников. -Москва: Энергоатомиздат, 1994. -344 с.
- Современная прикладная теория управления: в 3 частях. Ч. II. Синергетический подход в теории управления/под. ред. А. А. Колесникова. -Москва; Таганрог: Изд-во ТРТУ, 2000. -559 c.
- Колесников, А. А. Синергетические методы управления сложными системами: Теория системного синтеза/А. А. Колесников. -2-е изд., испр. -Москва: Книжный дом «ЛИБРОКОМ», 2012. -240 с.
- Krstic, M. Nonlinear and Adaptive Control Design/M. Krstic, I. Kanellakopoulos, P. Kokotovic. New York: Wiley, 1995. -563 p.
- Ioannou, P. A. Robust Adaptive Control/P. A. Ioannou, J. Sun. -New York: Dover, 2012. -848 p.
- Narendra, K. S., Parthasarathy, K. Identification and control of dynamical systems using neural networks. IEEE Trans. Neural Networks. 1990, vol. 1, no. 1, pp. 4-27.
- Shuzhi, S. S., Ge, S. S., Wang C. Direct adaptive control of a class of nonlinear systems. IEEE Trans. Neural Networks. 2002, vol. 13, no. 1, pp. 214-221.
- Huerta, H., Loukianov, A. G., Canedo, J. M. Robust multi-machine power systems control via high order sliding modes. Electric Power Systems Research. 2011, vol. 81, iss. 7, pp. 1602-1609.
- Fusco, G., Russo, M. Nonlinear control design for excitation controller and power system stabilizer. Control Engineering Practice. 2011, vol. 19, pp. 243-251.
- Ле Чан Тханг. Синтез нелинейных регуляторов переменной структуры для одного класса нелинейных объектов/Ле Чан Тханг//Вестник Дон. гос. техн. ун-та. -2007. -Т. 7, № 4 (35). -С. 104-111.
- Атрощенко, О. И. Синергетический синтез управлений для нелинейного объекта управления/О. И. Атрощенко//Вестник Дон. гос. техн. ун-та. -2008. -Т. 8, № 3 (38). -С. 245-251.
- Кузьменко, А. А. Нелинейное адаптивное управление турбогенератором/А. А. Кузьменко//Известия РАН. Теория и системы управления. -2008. -№ 1. -С. 112-119.
- Кузьменко, А. А. Нелинейные адаптивные законы управления турбиной судовой энергоустановки/А. А. Кузьменко//Известия РАН. Теория и системы управления. -2012. -№ 4. -С. 38-51.
- Андерсон, П. М. Управление энергосистемами и устойчивость/П. М. Андерсон, А. А. Фуад. -Москва: Энергия, 1980. -568 с.
- Кузнецов, С. П. Динамический хаос/С. П. Кузнецов. -Москва: Физматлит, 2006. -356 с.
