Робастное цифровое гиросиловое управление упругим космическим аппаратом при неполном дискретном измерении

Автор: Сомов Е.И.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Управление и моделирование
Статья в выпуске: 3 т.8, 2006 года.
Бесплатный доступ
Представлены оригинальные методы проектирования робастных цифровых систем гиросилового управления ориентацией космических аппаратов, имеющих упругую слабо демпфированную кон- струкцию.
Короткий адрес: https://sciup.org/148197853
IDR: 148197853 | УДК: 681.51
Robast digital gyromoment control of flexible spacecraft at an incomplete discrete measurement
Original methods for designing the robust digital gyromoment attitude control systems of spacecraft with a flexible weak damping structure, are presented.
Текст научной статьи Робастное цифровое гиросиловое управление упругим космическим аппаратом при неполном дискретном измерении
Применение новых конструктивных схем космических аппаратов (КА) и расширение круга задач, решаемых ими при длительном сроке активного существования в условиях параметрической неопределенности, слабого собственного демпфирования упругих колебаний конструкции КА, дискретного измерения только доступных координат и наличия различных типов запаздываний при формировании цифрового управления, обусловили актуальность новых разработок в этой области. В отличие от обычных приемов теории робастных систем, предложенный в [1] подход основывается на глубоком проникновении в существо конкретной проблемы, отраженной в структуре модели и собственных свойствах упругого КА в нелинейной зависимости от значений его неопределенных физических параметров. В этом подходе используется многократная фильтрация дискретных измерений только доступных координат с целью амплитудного ослабления влияния колебаний конструкции КА на основные процессы управления ориентацией его корпуса.
Модели движения и свойства упругого космического аппарата При традиционных обозначениях и некоторых упрощающих предположениях динамика КА упругой конструкции вместе с неподвижными гиродинами (ГД) в составе силового гироскопического комплекса (СГК) описывается векторно-матричным соотношением
"1 | 0 | 0 |
0 | S Yg | S Yg |
0 | - C K | C K |
Yg | Yg _ |
dh | "-У1 | -y 2 | -z 3 | — Z 4 |
A, (P) = -- = | x2 | 0 | 0 | |
h dp | . 0 | 0 | — X 3 | — X 4 _ |
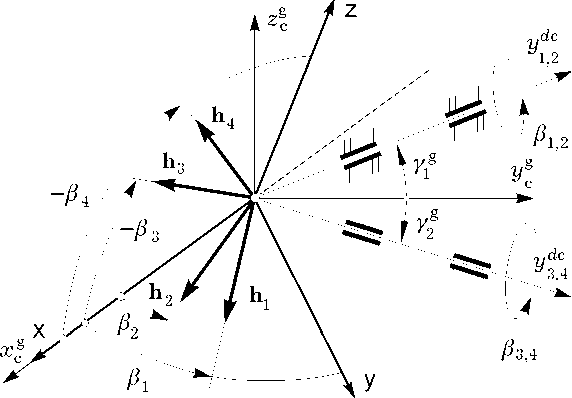
Рис. 1. Схема СГК 2-SPE
Принципиальной проблемой управления СГК избыточной структуры является выбор функции распределения потребного суммарного КМ СГК между ГД – так называемого закона настройки СГК. В схеме 2-SPE указанная проблема сводится к задаче распределения суммарного КМ СГК между двумя парами ГД. Наиболее рациональными являются явные законы настройки, которые позволяют получить все характеристики движения каждого ГД по явным аналитическим соотношениям. Введем нормированную функцию распределения суммарного КМ СГК между парами ГД fp (P) = X1 — X 2 +P (X1 ■ X 2 — 1); X1 = X12 /qy ; X 2 = X 34 /qz , qs = V4 - s2 ,| s |< 2, s = y, z (1.2) с фиксированным нормированным параметром p (0
внутри области S вариации КМ СГК остаются сингулярными только два одномерных множества в ее периферийной части. Поэтому для центральной части области S имеется взаимнооднозначная [2] явная аналитическая связь векторов-столбцов Mg (β) и β , в = u g , что позволяет исключить избыточность СГК и его сингулярные состояния.
При невозмущенном движении ЦМ КА по произвольной эллиптической орбите в центральном гравитационном поле вектор Rc = 0 , а в невозмущенном угловом движении связанная система координат (ССК) Oxyz совпадает с орбитальной системой координат (ОСК) Oxoyozo . Обозначим Sv = T vo (t) - v, где To6- матрица координатного перехода от ОСК к ССК и вектор-столбец vo (t) представляет скорость невозмущенного поступательного движения ЦМ КА в проекциях на оси ОСК. Учитывая, что v* = -[(о - T V 0)x]T vo (t) + T vo *( t) + Sv* , получаем нелинейную модель движения упругого КА, управляемого СГК, в виде
FV = -M (to x Sv) + го x (L x го - 2L) - Rwу - rg (у, у, о) + Rc; F“ = -L x (о x Sv) - Ан(в) в - о x G - JwY - mg (у,у,о) + Mo; в = ug;
Fsq = -M t (о x Sv) - Aq (Vqq + Wqq) - PW у , вектор G = Dqq + K + Н(в) представляет суммарный КМ упругого КА вместе с СГК, вектор Η(β) – суммарный КМ СГК, а матрица A н(в) = 5 Н(в)/5 в = hg A у A h (в). В данной модели СГК управлением считается вектор командных скоростей прецессии ГД в = ug , при этом формируется управляющий гироскопический момент СГК
Mg =-Aн(в) ug .
При вариации суммарного КМ Η(β) в малой окрестности его естественного “паркового” состояния, которое определяется условием Н* = Н(в*) = 0 при в* = {в,} = 0 , обеспечивается наибольшая эффективность работы СГК произвольной схемы. Для модели КА как абсолютно твердого тела динамика углового движения КА описывается соотношениями JO = -Aн(в) в - о x G + Mo;
в = ug , где вектор G = K + Н(в) представляет суммарный КМ механической системы “КА+СГК”. При отсутствии внешних возмущающих моментов (т.е. при Mo = 0) в теории гиросилового управления ориентацией КА относительно ОСК различают два варианта применения СГК, в зависимости от значения вектора G суммарного КМ системы “КА+СГК” для невозмущенного движения корпуса КА с вектором угловой скорости о = о0= {0,0, го0} = V0» const:
схема сбалансированная по суммарному КМ системы “КА+СГК”, когда вектор G = Jо0 + Н* = 0, “парковое” состояние СГК определяется из условия Н* = Н(в*) = -Jо0;
схема несбалансированная по суммарному КМ системы “КА+СГК” – вектор G = Jо0+ Н* = const * 0, в частном случае -при естественном парковом состоянии СГК Н* = Н(в*) = 0 это соответствует условию G = G* = Jо0= const * 0.
За счет малых внешних возмущающих моментов “векового” типа вектор G медленно изменяет свою величину и направление в инерциальном базисе. Для невозмущенного движения корпуса КА представим этот вектор в виде G = G* = G + Hs « const, где вектор G = 0 для сбалансированной схемы либо G = g* для несбалансированной схемы, а вектор Hs накопленного КМ СГК имеет про- извольное направление. Модуль вектора Hs ситуационно уменьшается до приемлемого уровня с помощью системы разгрузки СГК внешними управляющими моментами. При наличии вектора накопленного КМ Hs требуется компенсирующее управление СГК, которое определяются из условий - A н(в0) ugo = JV0 + V0 x G *; в0 = ugo, при этом изменяются собственные динамические свойства упругого КА. При условии f p (в) = 0 для функции распределения КМ (1.2) без ограничения общности для анализа устойчивости только линеаризованных моделей движения упругого КА принимается известная схема СГК “Звезда” [3] на основе трех ГД с естественным парковым состоянием Н* = Н(в*) = 0. Несбалансированность и наличие накопленного КМ СГК моделируется дополнительными постоянными векторами Η* и Hs.
При получении линеаризованной модели движения КА относительно ОСК наряду векторами-столбцами рассогласований углов 5а(t) = {5а1,5а2,5а3} = {у,ф,0}, угловых скоростей 5го(t) = го(t) -ro0(t) = {5ш1,5ю2,5ю3} = {tox,toy,toz - mo} корпуса КА и скорости поступательного движения δv ЦМ КА, используются векторы-столбцы 5ug = ug - ugo по управлению СГК и 5в = в - в0 по угловому положению ГД в составе СГК, а также векторы-столбцы малых внешних сил P и моментов M . Опуская далее знак δ вариации соответствующих координат, вводятся вектор состояния x = {а, го, v, q, q, в}, соответствующие матрицы и линеаризованная модель движения упругого КА при фиксированном положении панелей СБ представляется в виде x = Ax + Buug + BmM + BpP; y = Cx. (1.4) Матричные передаточные функции W(s) от вектора входа (ug, M либо P) к вектору выхода y получаются стандартно, на-
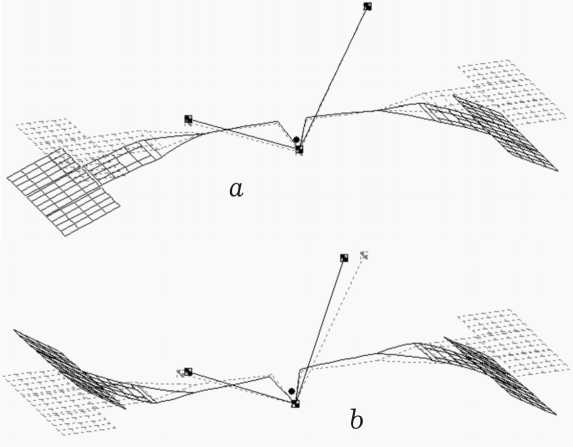
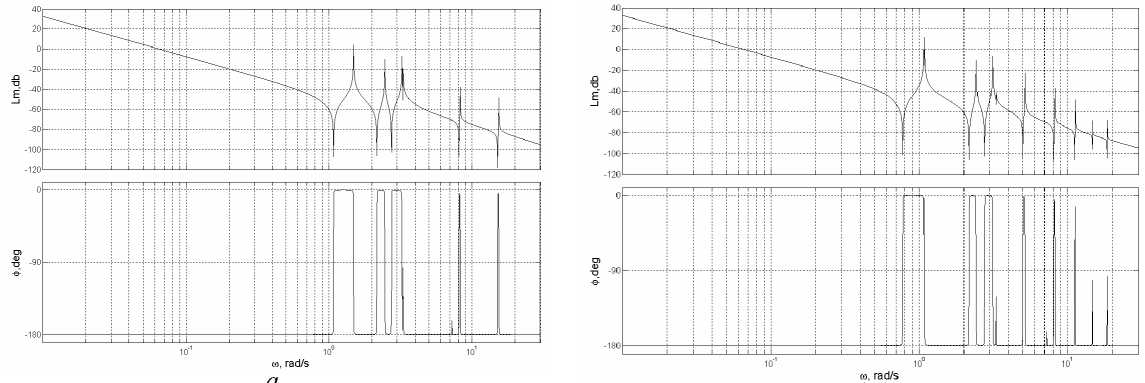
Рис. 2. Формы колебаний панелей СБ при Y =45о: a – симметричная, b – ассиметричная пример Wu(s) = C(Is - A)-1Bu для векторного входа ug . Логарифмические амплитудные и фазовые характеристики (ЛАХ и ЛФХ) формально получаются из передаточных функций с помощью подстановки s = jm , однако используемые алгоритмы их расчета основываются на методах спектрального разложения. Парциальные частоты панелей СБ и антенн в составе всего изделия трансформируются в собственные частоты. При этом каждой паре практически одинаковых парциальных частот двух симметрично расположенных на корпусе КА панелей СБ и антенн соответствует две собственные частоты, из которых первая (низшая) связана с симметричной формой колебаний, а вторая (более высокая) – с асимметричной формой колебаний, рис. 2. Все собственные частоты изделия мигрируют (изменяются) в зависимости от положения панелей СБ, причем такая миграция наиболее существенна для частот, соответствующих асимметричным формам колебаний навесных конструктивных элементов – панелей СБ и антенн. В качестве примера см. рис. 3 – для конкретного КА собственная частота по второму тону колебаний панелей СБ, соответствующая асимметричной форме изгибных колебаний, в зависимости от угла у их положения нелинейно изменяется от 0.147653 Гц (при Y = 0о) до 0.172134 Гц (при Y = 90о), т.е. примерно на 17%. Этот факт необходимо учитывать при проектиро-
b
Рис. 3. ЛАХ и ЛФХ упругого КА по каналу крена:
a - при Y = 0о , b - при Y = 90о
вании гиросиловой цифровой системы управления движением (СУД) и добиваться ее робастности в отношении вариации жесткост-ных и инерционных параметров упругого КА при минимальном гарантированном значении декремента колебаний навесных конструктивных элементов.
Агрегирование линейных многократных систем
Дискретные алгоритмы управления по каждому каналу основываются на дискретном аналоге реального дифференцирующего звена, обеспечивающего форсирование управляющего дискретного сигнала только в районе частоты среза ЛАХ. Дискретная частотная передаточная функция такого звена в зависимости от псевдочастоты X имеет вид W(X) = к(1 + jХт1)/(1 + jХт2), где к,т1,т2 являются параметрами.
Рассмотрим линейный стационарный объект с кусочно-постоянным управлением
X (t) = A x(t) + B uк (t), uк (t) = 0; y(t) = Cx(t);
x(to) = Xo, t € To = [t0,+ ^), t0 = 0, (2.1) где вектор-функция управления uк(t) = {ujк(t)} € Rr с определением uк(tk) = uk формируется в дискретные моменты времени tk и фиксируется на полуинтервале времени t e Tk = [tk, tk+1) c основным периодом Tu , что определяется как u к (t) = {u j к (t)}; Uj к (t) = Zh (t, tk, Ujk) = Ujk =
= const V€Tk = [tk,tk+1),tk = kTu, (2.2)
k e N0= {0,1,2,3,...}, вектор x(t) e Rn описывает состояние объекта, а вектор uk= {ujk} e Rr представляет дискретную текущую команду – выход дискретного алгоритма управления, формируемый БЦВМ только в дискретные моменты времени tk .
Измерение y (t) = Cx(t) состояния объекта (1.1) является неполным и выполняется только в моменты времени ts= sTq, s e N0 с периодом Tq < Tu, кратным периоду управления Tu , что описывается так:
ys =y(ts) = Cx(ts); yse Rl,l< n (2.3)
Будем считать, что при вычислении вектора дискретной команды управления uk применяется дискретная система с периодом квантования Tq , описывающая алгоритм рекуррентной линейной дискретной фильтрации рассогласования es = гк -xys, где rk= Cxk - сигнал внешней команды, rke Rl, rk= {rik}; x k — вектор эталонных переменных состояния системы, χ – диагональная матрица с элементами, равными 1 либо 0 при замыкании либо размыкании системы по отдельным каналам:
~s+1 = Axs + Be5. e5 = rk - X y5; ~~
~s = Cxs + De5 ;xs,~s,e5eR.s e No (2.4) и выходным сигналом eF = ~s |s=nq,k*. где k* = E[s/nq ], E[-] - символ целой части, a A, B~ , C~ , D~ – матрицы соответствующей размерности. Дискретизация с периодом Tq= Tu / nq стандартного непрерывного апериодического звена с передаточной функцией W(s) = 1/(1 + Tf s) и постоянной времени Tf , без фиксатора на входе для каждого канала управления при введении нормировки приводит к дискретной передаточной функции Wf(zq) = (1 + bf)/(1 + bfzq1); bf= -exp(-Tq/Tf); zq= exp(sTq) с условием Wf(1) = 1. В каждом канале такой передаточной функции соответствует алгоритм линейной дискретной фильтрации ~+1 = —by + (1 + bf)ys+1, который представляется в форме (2.4) с помощью диагональных матриц A = {-bf}, B = {bf}, C = {-(1 + bf)} и D = {1 + bf}.
Выходные сигналы eF фильтра (2.4) поступают в дискретный динамический регулятор с периодом дискретизации Tu : gk +1 = Bggk + CgeF; uk = кg (gk + PgeF) .(2.5) где Bg,Cg,Pg и Kg – постоянные диагональные матрицы, причем диагональные элементы матриц Bg,Cg,Pg при обозначении a =[(2/TuK--1]/[(2/TuK+1] вычисляются по соотношениям bg = [(2/T, )k2l-1]/[(2/T, К 2,+1];
pg =(1 - bg)/(1 -a ,); cg = pg(bg-a )•
При обозначениях sq= 1/nq= Tq/Tu;
T q
Adq = exp(T A); Bdq =f exP(TA)dT'B век-dq торное уравнение, описывающие эволюцию состояния объекта (2.1) с периодом измерения Tq при постоянном на этом периоде управлении uk , имеет вид xs+1 = Adxs+Bdquk. s,keNo. k = EDs/nj.^6) где значения управления uk формируются согласно (2.2).
Приведем рассматриваемую систему к дискретной форме для главного периода Tu , как наибольшему из имеющихся периодов квантования в системе, т.е. к виду:
Xk+1 = Ad Xk + Bd rk; Yk = Cd Xk. (2.7) где Xk= X(tk) = {xk.~k. gk} - вектор состояния системы в моменты времени tk , Yk= {xk} - вектор выходных переменных. а Ard – постоянная матрица размерности N х n . причем N = n +1 +1. Вектора X(tk) принципиально недостаточно для описания состояния системы во все промежуточные моменты времени t e Tk. так как на полуинтервале Tk= [tk.tk+1) вектор uk(t) (2.2) и командный вектор rk являются постоянными функциями времени. Поэтому следует принять расширенный вектор состояния ;Xk = {Xk. uk. rk} и анализировать его изменения на главном периоде дискретности.
Выделяется три вида изменения состояния модели системы для t e Tk:
1° вычисление вектора uk в момент квантования t = tk согласно (2.5):
Xk+= PXk. X±= X(tk ± 0); (2.8)
2° изменение состояния динамической части дискретного регулятора (1.5) для момента времени tk+1согласно матричному соотношению
X+ = PgXk; (2.9)
3° изменение состояния системы, измерение и фильтрация измерений с периодом Tq согласно соотношению
Xs+1= PqXs, Xs = {Xs,~s, gs, Us, rs}, (2.10)
В соотношениях (2.8) – (2.10) матрицы переходов P с различными нижними индексами имеют вид:
—
PM =
In | 0 | 0 | 0 | 0 " |
0 | Il | 0 | 0 | 0 |
0 | 0 | Il | 0 | 0 |
K gPgD~χC | KgPgC~ | Kg | 0 | к g p g D |
0 | 0 | 0 | 0 | 11 . |
;
Pg
—
In | 0 | 0 | 0 | 0 " |
0 | Il | 0 | 0 | 0 |
CgDχC | _ ~ CgC | Bg | 0 | c g D |
0 | 0 | 0 | Ir | 0 |
0 | 0 | 0 | 0 | 11 _ |
;
P=
εq Ad | 0 | 0 | Bεdq | 0 |
B~χC | A | 0 | 0 | B |
0 | 0 | Il | 0 | 0 |
0 | 0 | 0 | Ir | 0 |
0 | 0 | 0 | 0 | Il |
Учет всех изменений состояния непрерывно-дискретной системы на полуинтервале Tk приводит в итоге к векторному соотношению
модели системы (2.7) в соотношениях (2.11) с вектором состояния X~ k следует опустить вектор uk текущей команды на k-м шаге, так как он является избыточным – нет рекуррентности по индексу k. Алгебраически это отражается в том, что столбцы блочной матрицы Pu , а следовательно и столбцы матрицы A~ rd , соответствующие векторуuk , обязатель- но получаются нулевыми. Отбрасывая в матрице Ad последние r +1 строк и столбцов, получается искомая матрица A dr замкнутой системы, см. (2.11). Матрица Bdr получается из столбцов матрицы A~rd , соответствующих вектору rk , при отбрасывании в них последних r +1 строк, см. (2.11). В итоге матрицы Ad, Bd и матрица Cd = [ 11, 0,0] полностью описывают эквивалентную замкнутую дискретную систему (2.7) с периодом Tu и выходным вектором Yk = {xk}.
Данный подход к агрегированию линейной непрерывно-дискретной многократной системы на главном периоде позволяет получить дискретную модель разомкнутой по любому компоненту выходного вектора Yk системы относительно любого компонента входного вектора rk . С этой целью матрицы Bd = [bdj] и Cd = {cdi} в (2.7) представляются в виде совокупности столбцов bdj, j = 1: 1, где j – номер компоненты rjk вектора rk , и строк cdi,i = 1:1, где i - номер компоненты yik вектора Yk , и назначая одному (и только одному) диагональному элементу в матрице χ нулевое значение. В результате расчета матрицы Adr с такой матрицей χ получается модель системы, разомкнутой по j-му собственному (i = j) каналу, со скалярными входом rjk и выходом yik :
Xk+1 = AdXk+ bdj yik= cdi Xk. (2.12)
Анализ устойчивости и качества линейных дискретных моделей
Определение устойчивости линейной замкнутой непрерывно-дискретной системы понимается как прямая композиция классических понятий устойчивости ее непрерывной и дискретной частей. Разработанное программное обеспечение для анализа устойчи-

Tau1
Tau2 К файл
Рис. 4. Диалоговая панель программного комплекса для линейного анализа устойчивости СУД
X______у______z
550 | 400 | 400 |
8 | 8 | 8 |
0.03 | 0.025 | 0.03 |
Анализ устойчивости | ||
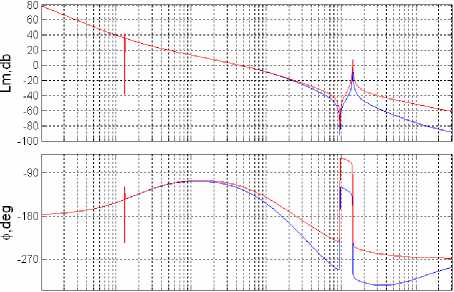
вости многократных дискретных моделей ги-росиловых СУД КА основано на частотных методах (критерий Найквиста в логарифмическом масштабе для разомкнутых каналов) и на корневых методах с использованием прямого расчета собственных значений zid(Ad) матрицы замкнутой дискретной системы. Созданные программные средства позволяют выполнять тщательный анализ влияния сбалансированности схемы и накопленного КМ СГК на устойчивость гиросиловой СУД упругого КА. В качестве примера некоторые результаты таких исследований для конкретного КА с декрементами колебаний 5p =5a = 0.002 его конструкции и исходными данными на рис. 4 представлены по каналу рыскания на рис. 5.
На рис. 5 представлены ЛАХ и ЛФХ по каналу рыскания для несбалансированной схемы, где верхние графики соответствуют контуру без применения фильтра, при этом всем каналы гиросиловой СУД неустойчивы. Эти дискретные частотные характеристики иллюстрируют эффект, вносимый дискретным фильтром с постоянной времени Tf = 1.5
10"* 10"° 10"° 10"’ 10° ю’
X, rad/s
Рис.5. ЛАХ и ЛФХ канала рыскания сек, а именно эффект подавление ЛАХ только в окрестности резонанса панелей СБ по второму тону упругих колебаний при незначительном уменьшении запаса устойчивости по фазе до 57.4 °.
Основной вывод исследований: с позиций обеспечения робастной устойчивости и качества при наличии накопленного КМ СГК предпочтительна сбалансированная схема.
Список литературы Робастное цифровое гиросиловое управление упругим космическим аппаратом при неполном дискретном измерении
- Cомов Е.И. Робастная стабилизация упругих космических аппаратов при неполном дискретном измерении и запаздывании в управлении//Известия РАН. Теория и системы управления. 2001. № 2.
- Сомов Е.И., Бутырин С.А., Сорокин А.В., Платонов В.Н. Управление силовыми гирокомплексами космических аппаратов//Труды X Санкт-Петербургской Международной конференции по интегрированным навигационным системам. С.-Петербург: ЦНИИ "Электроприбор", 2003.
- Сомов Е.И. Динамика многократной цифровой системы пространственной гиросиловой стабилизации упругого космического аппарата//Динамика и управление космическими объектами. Новосибирск: Наука, 1992.
- Глумов В.М., Крутова И.Н, Суханов В.М. Адаптивная система управления на основе нечеткой логики для большой космической конструкции в процессе ее сборки на орбите//АиТ. 2004. №. 10.
- Anshakov G.P. Nonlinear dynamics of spacecraft fault-tolerant control systems//Нелинейная теория управления и ее приложения. М.: Физматлит, 2003.
- Matrosov V.M., Somov Ye.I. Nonlinear problems of spacecraft fault tolerant control systems//Nonlinear Problems in Aviation and Aerospace, vol. 12: Advanced in Dynamics and Control. -A CRC Press Company, Boca Raton -London -New York -Washington, D.C., 2004.
